Abstract
The primary purpose of task allocation is to build each equipment platform and quickly complete integration planning at the actual combat speed to achieve efficient management of the entire task. In this process, higher requirements are put forward for dynamic, cooperative, and highly adaptive drone colony organization. In this paper, the scheduling problem of hybrid unmanned aerial vehicle (UAV) systems is studied under an uncertain environment. First, the system-capability-task organizational structure is defined and quantified, which lays a foundation for dynamic adjustment of the organizational structure in the future. Then, combined with the theory of flexible network and elastic network management, the model is calculated, and the linear transformation function and fuzzy theory are used to stratify and cluster the capability layers. On this basis, four motif structures are introduced for abnormal nodes in the process of dynamic adjustment, and a dynamic group reconstruction algorithm (DRA-M) is established. Finally, the time and communication load indexes are determined, and the alternative strategy is designed for the failure point. The performance of the classical scheduling algorithm is evaluated by benchmarking it under different conditions. The results show that the algorithm has a good dynamic adjustment ability in the event of a UAV swarm emergency, which is a bright light for the future study of highly adaptive UAV cluster organization.
1. Introduction
A UAV is a small flying system that performs a mission, and with the rise of technology and AI algorithms, more and more people have begun to study the group task allocation of multiple UAVs, as well as the execution of multiple UAVs and multiple missions in complex environments and situations. Various factors promote the rapid configuration requirements of heterogeneous or homogeneous cluster system simulation, which not only meet the functional requirements but also put forward higher mechanism requirements [1]. Including the aerodynamic characteristics, behavior, and nonfunctional constraints of the cluster allow the cluster system to rapidly switch from one environmental situation to another [2]. Some scholars established an artificial immune system algorithm in response [3], managed the cluster through a coordination mechanism, and mapped the simulation test platform to solve the swarm problem, but it is parameterized from the specific task type of the swarm and does not consider the impact from the perspective of system function. Only the task allocation problem of the cluster is considered, including the mixed linear integer programming algorithm [4], ant PSO algorithm [5], genetic algorithm [6], and auction algorithm [7]. However, it does not consider the change in the upper and lower roles in the process of individual task execution, as well as the change in task requirements in a dynamic environment bringing greater difficulties to task rescheduling. The intelligent unmanned cluster combat system in the new era is an unmanned and intelligent military technology. It distributes autonomously on the equipment platform, and the elements of military forces are networked and loosely coupled. At the same time, it has the characteristics of complex adaptability of behaviors. From the perspective of cluster function, the relationship between task, system, and capability is established, the capability layer and capability cluster are established, and the task scheme space is quickly traversed [8].
How to cluster the rapid reconstruction in the process of the task assignment problem for the unmanned aerial vehicle (UAV) becomes a challenge, and this paper puts forward using a fourth-order motif with a specific function unit connection structure. First of all, for task decomposition through the target into a task node with a logical relationship, according to the clustering clumps and mathematical methods, the capability is divided into layers and a cluster. Then, a dynamic scheduling method is established to find the most suitable planning scheme to execute time-varying tasks by traversing all capability clusters, considering the time and load. Each task execution sequence corresponds to a task planning scheme [9], and thus how to establish an appropriate scheduling planning algorithm is the key to this paper.
The main contributions of this paper are as follows (Figure 1):
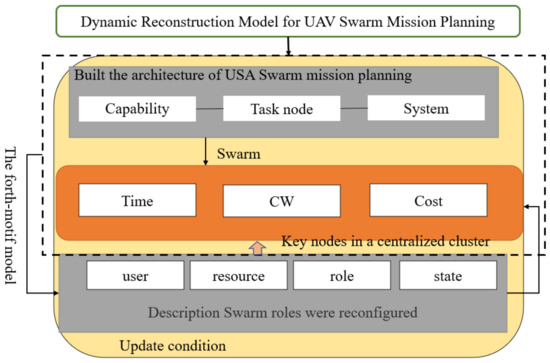
Figure 1.
The main organizational structure of the paper.
- The system-capability-task requirement mapping model is proposed for the first time, and the flexible network of the multi-UAV cluster is established as a heterogeneous network composed of three kinds of relations and six kinds of nodes.
- Quantification of task allocation by introducing three indicators: time, collaborative load, and cost.
- In the hybrid structure, the disturbance of and change in key nodes in the central-oriented structure are considered, the authorization transfer is considered, and the motif is introduced from the perspective of roles for evolution operation.
- After quantifying the model, the dynamic reconstruction algorithm (DRA-M) is established and compared with the FDSA algorithm and several classical algorithms for different indexes.
The rest of the article is arranged as follows (Figure 1). Section 2 explores the recent concepts of flexibility to solve the problem of effective refactoring. In Section 3, the functional parameters of the cluster are quantified, the flexible cluster network model is established, and the framework of the fourth-order motif is constructed. In Section 4, a dynamic reconstruction algorithm is established based on the fourth-order motif in Section 2 and Section 3. In Section 5, a case is set up, and two indexes of the time and load degree are quantified to test the effectiveness of the DRA-M proposed in Section 4. Section 6 summarizes the article.
2. Related Work
The flexibility of the current cluster organization reconfiguration is mainly reflected in the following aspects. First, short-term passive offline design is carried out for the predictable low-intensity disturbance within the boundary of the large and small preset mission capabilities and can be measured by the indexes of robustness, reliability, and mission effectiveness. Secondly, it focuses on the internals of the network structure, which has a high intensity of disturbance changes, such as the change in the internal organization role, and carries out passive offline design, which can be measured by indexes such as survivability and recovery [10]. Third, it focuses on the adaptability design of external dynamic changes, mainly aiming at dealing with the disturbance caused by the unpredictable external dynamic environment through active online learning, such as the MDP model, continuous learning, and optimization of the design scheme (Table 1).
There are many kinds of disturbances, including internal disturbances and external disturbances, and their interruptions are random. The time and location of the interruption can be predicted to trigger events for modeling [11]. However, the context of the interruption and valid information such as the duration and status of the interruption must be known to complete the modeling, but sometimes the necessary information is not fully available. Flexibility means the process of dealing with the occurrence of a disturbance environment and not the disturbance after the occurrence of processing, while the flexible processing method aims to not let the system fail in heavy use and then go to the manager to recover the process but rather schedule additional resources in advance to deal with this imminent risk [12]. In the multi-UAV system, the structural organization is relatively complex [13,14]. In the process of considering the mobilization at any time, the situation of each UAV and the organization needs to be considered (i.e., the coordination degree of “software-hardware”). The software represents the coordination degree of the organizational structure relationship between clusters [8], while the hardware refers to the UAV system. The combination of an organizational structure and hardware systems is not sufficiently considered at present. However, a large number of researchers have shown that adding the concept of flexibility to an organizational architecture can achieve very good results (Table 1). We hope to add flexibility to the component list of cluster scheduling to achieve the effect of rapid reconstruction.

Table 1.
Domain partitioning of architecture design for architecture features.
Table 1.
Domain partitioning of architecture design for architecture features.
| Public Cooperative | Object | Control Scheme | Method |
|---|---|---|---|
| Roberto Posenato [15] | Time points | Design the constraint-propagation algorithm | Checking the controllability of such networks |
| Hua Yan [16] | Sensor network | Time allocation and optimization | Optimizing the BS data |
| Zheng Chang [17] | Mobile communication system network | Trajectory design and resource allocation | Deep reinforcement learning approaches |
| Shiyang Zhou [18] | Ensuring energy efficiency | Formulate a joint optimization problem | Building a multi-agent twin delayed deep deterministic policy |
| Gu, Kongjinga [19] | Identify the UAV swarm | Network-integrated trajectory clustering | Enhance the swarm trajectory |
| Chuyang Yu [20] | Marine riser system | Develop an adaptive neural network | Boundary control |
| Guohua Wu [21] | Data relay satellite networks | Task-scheduling algorithm | Resolution-assisted iteration |
| Youngwoo Lee [22] | Combat effectiveness | Quantitative measure | Using a meta-network representation |
| Manilo Monaco [3] | Manage swarms | Responsive and adaptive coordination mechanisms | The artificial immune system manages the sequence |
| Leitao, P. [23] | Robustness and cooperation in holonic multi-agent systems | Present the basic underlying principles | Adjust the relationship of the system |
| Michael Sievers [24] Azad M. Madni [25] | Resilient spacecraft swarms | Present a contract-based approach | Partially observable Markov decision processes or the hidden Markov model |
Although there are many arguments about flexible networks, most of them are about “variability” and “invariance” [26]. In this paper, given the possibility of node interruption of a UAV’s cluster architecture and the uncertainties encountered by the task side, as well as the disadvantages of the network architecture in terms of flexibility, adaptability, and self-adaptability, a task-oriented flexible network is proposed.
A flexible network model uses the elastic theory of networks to serve the operational mission of the network architecture. A flexible network is based on the use of the resources of network nodes within the current architecture and the practical resources of other nodes in the whole network [27] to achieve rapid adaptation of the failure node requirements in order to have the ability to adapt to current sudden environmental changes. The flexible network is mainly used in the adaptive mechanism [28]. When the cluster network changes, it can be adjusted autonomously in a short time, respond in time or find out countermeasures in time, and reduce losses as much as possible. According to the specific domain analysis of cluster architecture robustness, elastic design, and reconfigurable flexible networks, the architecture design domain oriented toward the architecture characteristics is established (Table 2).
Table 2.
Domain partitioning of architecture design for architecture features.
The task planning method of organization reconstruction based on a four-order mode can effectively adjust the internal structure of cluster organization under the dynamic change in the environment, but algorithms need to be adjusted more quickly, and time is of the essence during combat missions.
3. Dynamic Reconstruction Model for UAV Swarm Mission Planning
The connections between platform systems can be reflected by changes in the network’s organizational structure. The third part models the cluster system reconstruction. Cluster system reconstruction refers to the potential failure of the nodes in the group when the UAV group executes the task. This kind of failure is bearable for the group and does not require the superior platform to know the execution of the next command, but it automatically triggers the emergency plan. The rapid change in fault nodes is based on the flexible network theory and the super-network theory so that they can match the ability and tasks in the face of environmental changes in a timely manner. This kind of network organization structure can be quickly adjusted in a short time and has adaptability and evolution, being called a flexible network.
According to the change in organization structure, when adapting to the adjustment of the network organization structure, it is necessary to know the effective accuracy of swarm reconstruction so as to ensure the high-quality completion of tasks. Because a motif is a subnetwork structure [12,29,30], we can introduce an adaptive network organization structure in the motif network structure and use the relationships among users, resources, roles, and states to control the change in the motif structure. Under the guidance of the accusatory relationship, the system platform is re-evaluated after the change in task requirements.
3.1. Description of the Problem
Flexible networks are used to model tasks, systems, and capability nodes. According to the task’s demand for capability, different capability clusters are clustered so as to form the mapping mechanism of the capability and task. Finally, according to the different needs of the task, the selection of different capability clusters is made.
In the organizational architecture of a multi-UAV cluster, the mission is decomposed into a series of tasks that can be performed. These tasks constitute the task network and can be abstracted as a directed graph, denoted as , where N represents the set of nodes and represents the set of task nodes. The system network table shows the relationships between the system nodes and is denoted as , which represents the set of system nodes, and represents the set of edges of system nodes. Similarly, the capability is the capability of reconnaissance, early warning, and fire interception provided for cluster operations in the cluster warfare architecture, denoted as , where P represents the set of capability nodes and represents the set of edges of the capability nodes. Based on this, the formal description of a flexible network is established. The adaptive network of the multi-UAV cluster is a heterogeneous network GF composed of three types of relations and six types of nodes, denoted as (Figure 2).
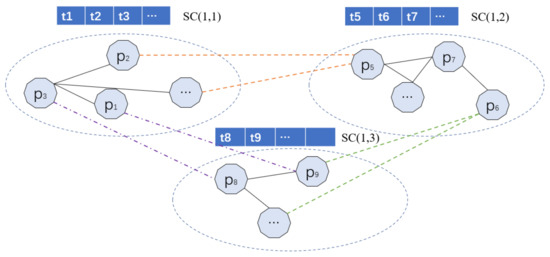
Figure 2.
Schematic diagram of capability stratification.
The capacity substitute nodes that play the role of supply capacity in the later stage are set as the supply layer, meaning that , which clusters the supply capacity layer according to the task demand met, and we define it as the supply cluster (Denby ), where l is the number of layers and a is the serial number of the supply cluster. is the number of clusters provided by the clustering capability, which can be expressed as . For example, the first three are represented by elliptical dotted lines. By constructing the mapping relationship between the capability supply layer and the task demand, the search space of a single supply node of a task is reduced to search the whole capability cluster.
We established that a single provisioning node automatically joining or leaving a task did not affect the overall network structure. For the task nodes in the network, the adaptive network will dynamically send them to the task queue in the corresponding supply cluster, according to the demand for a capability supply. The nodes of the capability supply cluster will bid for the task service. If the requirements cannot be met, then they can be searched for from the upper level or higher level to reduce unnecessary delays as much as possible, and the task requirements will be quickly reflected. The task planning of the hybrid clusters includes centralized clusters and distributed clusters. For distributed clusters, single-task scheduling traction does not affect the cluster but has a great impact on the centralized cluster. Therefore, when assigning tasks to system nodes, the role of system nodes should be determined, whether they are commander nodes in key positions or not, in addition to determining whether to authorize a transfer to it.
3.2. Mathematical Model of a Flexible Network Architecture
According to C2 organization theory [31,32], the organizational structure is divided into three parts—the capability, task, and system platform—when the mission is decomposed. To achieve rapid task matching and scheduling, in this regard, based on the fuzzy theory, we assigned the ability of the domains [33,34], namely the task and system domains, to the response-ability of the task layer and system layer, respectively, layered on the division of clusters in each supply according to the mission requirements and corresponding relation, found the corresponding layer, and then quickly found the corresponding clusters [6] with accurate positioning to complete the task assignment. To understand the modeling idea more clearly, we built the symbol annotations as shown in Table 3.
Table 3.
Symbol annotations.
Theorem 1.
Capability Node.
Let the capability be indexed by l such that . The mission capability of UAVs can be defined as having certain functions that provide m capabilities, such as command , reconnaissance , projection , and other functional capabilities:
Theorem 2.
Task Node.
It can be indexed by n, where . We use the task-capability to build an adjacency matrix, and the task-capability says whether a task l needs the capability n or not.
Theorem 3.
The system platform node is expressed as
A system is a platform that fulfills a requirement, which is closely related to capabilities, denoted as D, and builds the system-capability-task relationship, where the system-capability matrix is and the task-system matrix is . Let be indexed by , and it can be expressed as and indexed by . It can be expressed as .
Theorem 4.
The capability cluster is expressed as follows.
The L layers of the a cluster are indexed by , . The number of clusters is from . This is shown in Figure 2.
The capability stratification function is established based on the fuzzy function, which is divided into three intrinsic attribute values: , , and . According to the three intrinsic functional layers , the membership function is then used for calculation, and the standardization operation is carried out according to Equations (4)–(6). For rapid positioning, the relation between the capability layers can be expressed as in Equation (7) by adding the weight value. The weight values can be thought of as focusing on adjusting the desired ability:
The membership function of fuzzy mathematics is used to divide the capacity level of the supply layer. According to Equation (7), the capabilities and tasks are divided into layers and clusters (Figure 3). When a planned task fails due to its failure or the failure of the external environment, new task requirements will appear, triggering the condition of matching tasks and capabilities. In this case, the task node needs to match the node with the largest ability among the remaining nodes. In the capability layer , the maximum value of the largest layer needs to be traversed from largest to smallest. Please refer to the details in [26].
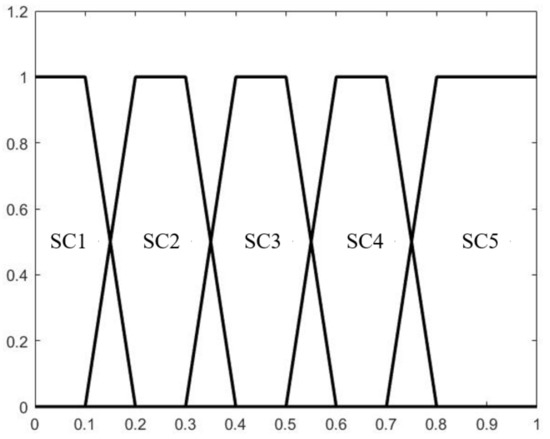
Figure 3.
The membership of the capability layer.
3.3. Fourth-Motif Model
In the process of task scheduling, we find that when the demand is thrown out, the task layer will match the capability layer and will match the agent of the charge class. In the mixed distribution UAV swarm that is both centralized and distributed, sometimes the charge node of the swarm does not execute the task. At this time, we thought of adding the relationship matching between roles and user capabilities to solve this problem. This kind of relationship at the organizational level is expressed by the motif (Figure 4). For a detailed description of the evolution of modules, please refer to [35]. Due to its simple structure, obvious change, and simple and convenient adjustment, the motif was selected as the basic structural unit.
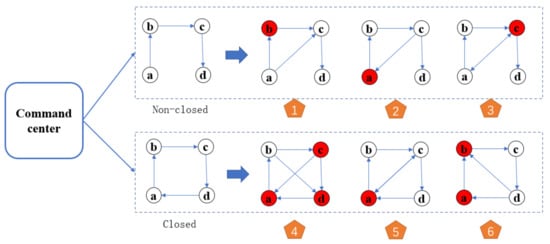
Figure 4.
The motif evolution reconstruction.
Considering the particularity of the accusatory relationship, it includes four types: role updating a, role assignment b, role evaluation c, and role generation d. Therefore, the fourth-order motif is constructed. The fourth-order motif is generated from the cluster leader platform, and the connection mode can be directed or undirected. The fourth-order motif can be expressed in closed and non-closed forms. The possibility of a single die body does not contain the circulation, closing the fourth-order die body subgraph connections such that they have .
The first index is the similarity of the structure. Using the Jaccard similarity coefficient, and are defined, and then we normalize them to avoid having a denominator of zero:
The second index quantifies the importance of the motif from the perspective of statistics. After the expert’s experiment, it is proven that in the BBV model, when the degree , the degree distribution follows the Poisson distribution and is a gentle curve:
The last is for the task index, where the completion time () is set to
4. Dynamic Reconstruction Algorithm (DRA-M)
In an adaptive network organization structure, capabilities are divided into different capability clusters and represented as different sets to form a clustered matrix. Each task indicates a combination. According to the task, the combination of clusters will be found, so the time cost will be greatly reduced after two screenings (Table 4):
Table 4.
Symbol annotations.
The dynamic reconstruction algorithm is completed based on the adaptive network organization structure (DRA-M) by combining the motif. By default, the failure node caused by some force majeure factors will trigger the execution of the algorithm at the same time. The process of the algorithm is as follows (Figure 5):
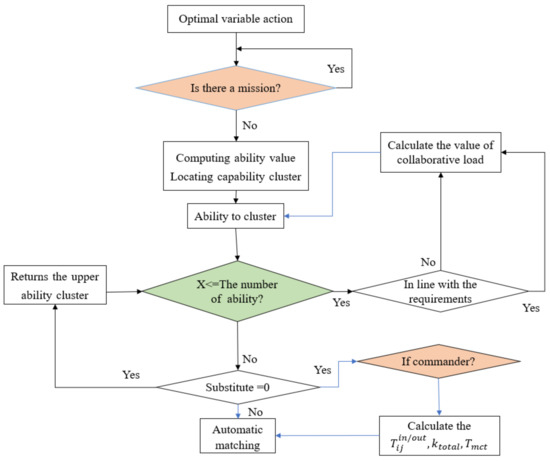
Figure 5.
Scheduling algorithm of DRA-M.
- The task requirements are delivered to the capability cluster node of the capability layer. When a control robot discovers the task requirements, it finds the capability cluster according to Equation (4) and then sends the task to the virtual node.
- The alternative strategies for the starting capability are selected, and then a signal is generated to automatically trigger the selection strategy. Then, the coordinated robot starts to wait for the evaluation result.
- The capacity workload, the workload of the computing system, is computed [36]. If the workload meets the requirements, then the information of the computing capacity will be accepted; otherwise, it will be discarded.
- The value of the collaborative load is evaluated, and then the result is sent to the management robot.
- The node to execute the target task is determined, and the robot automatically evaluates and selects the node with the maximum capability value (Equation (13)).
- Whether the current alternative node is the accusation node is determined. If it is, then the confirmation of role replacement will be issued, and Algorithm 1 will be executed; otherwise, the task will be executed.
- The tasks are performed. When the backup policy ends, the current UAV is automatically replaced, the task is completed, and the operation is over.
Here, is the total load value, and is the previous load value. Through calculation and two screenings, the maximum load value of the UAV cluster node will not be more than itself. While the traditional robot conveys information, each one receives the information, so the load value increases exponentially (Table 5 and Figure 6).
| Algorithm 1 Dynamic Reconstruction Algorithm (DRA-M) |
|
Table 5.
Contrast with traditional random loads.
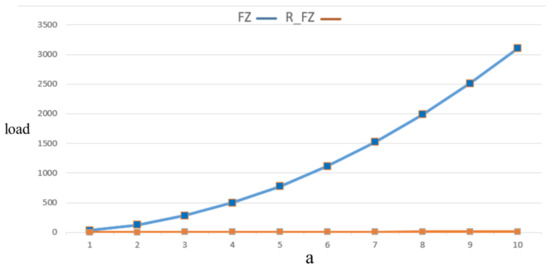
Figure 6.
Contrast with traditional random loads.
5. Case Study
In this paper, the ECLIPSE platform and a JAVA HOTSPOT(TM) 64-bit server virtual machine were used to implement the DRA-M algorithm. At the same time, a group of about 10 UAVs was set up for traversal to verify whether the cluster could adapt to the task scheduling and capability requirements (Table 6). At the same time, one could effectively reduce the scheduling time and the communication load of the system. Therefore, two indexes, the time index and system communication load, were established as evaluation indexes.
Table 6.
Virtual task redistribution of 10 UAVs.
The time index was set as the sum of the time when the scheduled UAV node connected to the virtual node and the time of executing the task:
The completion time depends on the time and the task execution time of :
The cooperative load of CW can be expressed by the Pearson correlation coefficient *, where belongs to the capability layer and the corresponding relationship between the careful consideration of the task capability is calculated.
In Test 1, if the number of the first group of virtual UAVs was 10, and three failed nodes were randomly selected, then as shown in Table 5, it can be seen that three virtual nodes—host1, host6 and host9–performed scheduling calculation and capacity selection, and it was found that the remaining capacity value of the virtual node at host2 after the execution of scheduling was 5. The value of host8 was 12, and the value of host10 was 39 (Figure 7).
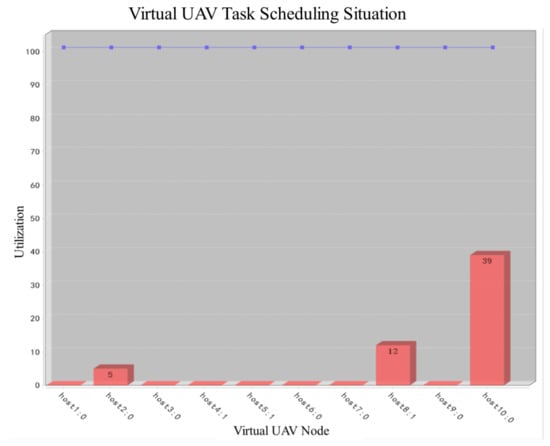
Figure 7.
Failure point scheduling tests.
Therefore, we first set up the thread to verify whether the failed task node could be tolerated and whether it had the function to accomplish the basic capability redistribution. The first row is the number of virtual UAVs, which was not distributed according to a certain sequence. The second row is the storage situation of the capability value of the UAVs, the third row is the task node with failure nodes, and the last row is the residual capability value after redistribution. The code shows that the internal call was executed 129 times before the final task redistribution was completed, and its relative equilibrium rate was 1.5860751. In the last row, 10 robots randomly scheduled 6 robots. According to the calculation of the ability value, the nodes of host5, host6, host8, host9, and host10 were assigned tasks (Table 6).
In order to prove the effectiveness of the DRA-M algorithm, we established two indexes to compare the algorithm with the classical Max-Min algorithm [37,38] and the previously proposed FDSA and scheduling algorithms. First, the performances of the classical algorithm and DRA-M proposed in this paper were compared for the cluster adaptation problems; the first was the communication load, and the other was the scheduled TIME of the task node (CW/TIME). In the same case, the shorter the time, the better the algorithm (Figure 8, Figure 9 and Figure 10). Similarly, the smaller the load consumption, the better the algorithm’s performance. Among the 10 hosts, CM was tested according to the FDSA algorithm, DRA-M algorithm, and classic Max-Min algorithm, respectively. As shown in Figure 8, it is obvious that the DRA-M and FDSA had lower CW consumption than the classical algorithm. Our main purpose is identifying the disturbance of key nodes by Cen Shi DRA-M in the centralized system. Therefore, as shown in Figure 9, the DRA-M algorithm was compared with the classic Max-Min algorithm. With the increase in running times, the DRA-M algorithm consumed a significantly lower time value, and the gap became larger and larger. After that, we put the four algorithms into the same index for comparison, as shown in Figure 9. In the case of disturbance, the FDSA and DRA-M algorithms obviously had shorter task assignment times, and the DRA-M algorithm was the better one among them.
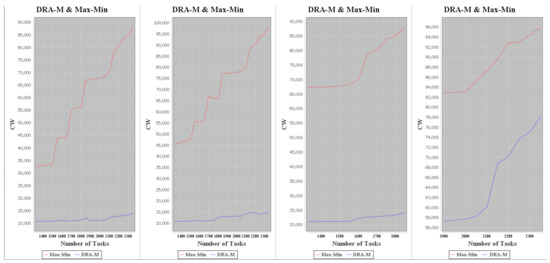
Figure 8.
CW comparison of Max-Min and DRA-M algorithms.
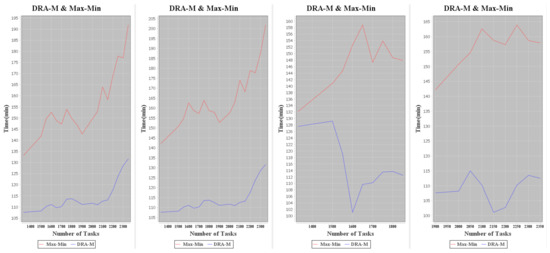
Figure 9.
comparison of Max-Min and DRA-M algorithms.
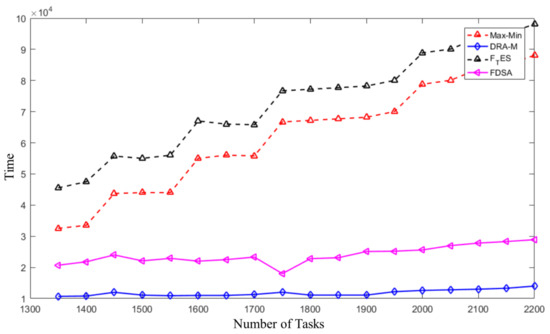
Figure 10.
Time comparison diagram of four algorithms.
In addition, the simulation’s execution conditions mainly depended on the number of failed nodes among the randomly generated tasks. After the assignment of different ability values, the algorithm automatically adjusts, selects, and replaces the task nodes and completes the task. Divided into the same time nodes under the same ability, we compared their scheduling processes (Figure 11) and different breakpoint time points under the same ability and compared their scheduling processes under different capability values at the same time.
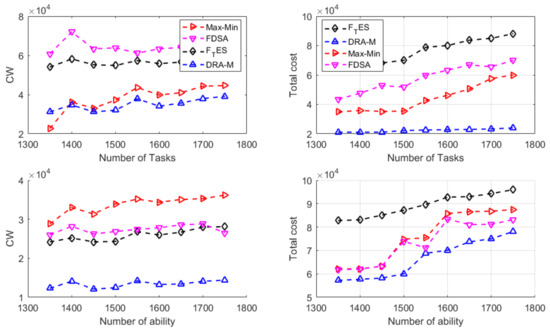
Figure 11.
Comparison of algorithms for the same task and capability set.
It can clearly be seen that the DRA-M algorithm maintained relatively low-cost consumption for the same task and the same capability value. Even though the DRA-M algorithm did not remain very stable, it still had the lowest consumption. In the communication load index, the task value was the same, and the ability value was the same for the baseline condition, triggered according to whether the decision control node afterward was a little high, and then still kept the load value in a small and stable state, generally speaking. This, it still had the advantage.
6. Conclusions
Aiming at the problem of rapid reconfiguration of UAV clusters in a short time, a flexible fast scheduling model was proposed by using flexible network and complex network theory, and a system-capability-task organizational framework was established. Through the quantitative structure of the framework, the concept of clustering in mathematics was introduced, which bought time for the matching of functions and tasks of the model. The testing of the DRA-M algorithm’s refactoring was very rigorous. Considering the key nodes in the central-oriented task cluster in the scheduling process, the motif structure was introduced after clustering. A statistical method was used to quantify the model structure, and three indexes were established, which could quickly index the module structure. This solved the problem of “abnormal” nodes during scheduling. Then, a dynamic reconstruction algorithm was established. To illustrate this situation, we tested it on JAVA using the same set of tasks. The results show that the DRA-M algorithm was superior to the FDSA algorithm, considering many factors such as capability and tasks. Next, we will still focus on the online adaptive reconstruction of the cluster, add some indicators to consider more interference possibilities, further study how to quickly reconstruct the cluster in a short period of time, and conduct simulation tests for dynamic and static reconstruction.
The scope of future work mainly includes the following:
- Establish a more appropriate simulation scenario and test the effectiveness of the dynamic reconstruction scheme under the same case.
- Strengthen the dynamic reconstruction algorithm and task scheduling process and improve the cluster architecture.
- Establish the contribution rate contract, plan according to the contract content, and test the completeness before the bidding task.
In the following work, we hope to combine the complete dynamic scheduling algorithm, compare the embedded contribution rate contract, and simulate the task completion degree under static and dynamic conditions to strengthen the organizational structure’s fault tolerance to unmanned clusters.
Author Contributions
Conceptualization, T.D.; Data curation, T.D.; Funding acquisition, X.Z. and M.H.; Methodology, T.D., W.W. and T.W.; Writ draft, T.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China under Grant 72101263.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, W.; Li, X.; Yang, S. A design method of dynamic adaption mechanism for intelligent multi-unmanned-cluster combat system-of-systems. Syst.-Eng.-Theory Pract. 2021, 41, 1096–1106. [Google Scholar]
- Jafer, S.; Zeigler, B.; Kim Doohwan, D.H. A Framework for Rapid Configuration of Collaborative Aviation System-of-Systems Simulations; Springer International: Berlin/Heidelberg, Germany, 2018; Volume 1, pp. 92–105. [Google Scholar]
- Monaco, M.; Simionato, G.; Cimino, M.G.C.A.; Vaglini, G.; Senatore, S.; Caricato, G. Using Artificial Immune System to Prioritize Swarm Strategies for Environmental Monitoring. In Proceedings of the 2022 IEEE International Conference on Cognitive and Computational Aspects of Situation Management, CogSIMA, Salerno, Italy, 6–10 June 2022; pp. 104–110. [Google Scholar]
- Li, Z.; Liu, R.; Chen, X.; Xu, R.; Xing, L. Model and algorithm of unmanned aerial vehicle path planning considering error correction points. Comput. Integr. Manuf. Syst. 2022, 4, 990–1000. [Google Scholar]
- Geng, N.A.; Meng, Q.G.; Gong, D.; Chung Paul, W.H. How Good are Distributed Allocation Algorithms for Solving Urban Search and Rescue Problems? A Comparative Study with Centralized Algorithms. IEEE Trans. Autom. Sci. Eng. 2019, 16, 478–485. [Google Scholar] [CrossRef]
- Duan, T.; Wang, W.; Wang, T. Intelligent Collaborative Architecture Design based on Unmanned Combat Swarm. In Proceedings of the 6th International Conference on Big Data and Information Analytics, BigDIA, Shenzhen, China, 4–6 December 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Yan, S.U.N.; Run, H. Multi-robot formation time optimization based on auction algorithm. Manuf. Autom. 2021, 1, 13–17. [Google Scholar]
- Duan, T.; Wang, W.; Wang, T. Dynamic Tasks Scheduling Model of UAV Cluster Based on Flexible Network Architecture. IEEE Access 2020, 8, 115448–115460. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W. A motif-based rescue mission planning method for UAV swarms usingan improved PICEA. IEEE Access 2018, 6, 40778–40791. [Google Scholar] [CrossRef]
- Madni, O.E.; Azad, M. Introducing Resilience into Multi-UAV System-of-Systems Network; University of Southern California: Los Angeles, CA, USA; Springer International Publishing AG: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Madni, A.M.; Sievers, M. Closed-Loop Mission Assurance Based on Flexible Contracts: A Fourth Industrial Revolution Imperative. In Systems Engineering in the Fourth Industrial Revolution: Big Data, Novel Technologies, and Modern Systems Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2020; p. 445. [Google Scholar]
- Edwin, O.; Madni Azad, M. Model-Based Approach to Engineering Resilience in Multi-UAV Systems. Systems 2019, 7, 11. [Google Scholar]
- Zhou, X.; Wang, W.; Wang, T. A Research Framework on Mission Planning of the UAV Swarm. In Proceedings of the 2017 12th System of Systems Engineering Conference (SoSE), Waikoloa, HI, USA, 18–21 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Zhou, X.; Wang, W.; Wang, T. Patrolling Task Planning for The Multi-Layer Multi-Agent System Based on Sequential Allocation Method. In Modeling and Simulation of Complexity in Intelligent, Adaptive and Autonomous Systems, MSCIAAS 2018, Part of the 2018 Spring Simulation Multi-Conference, SpringSim 2018; ASSOC Computing Machinery, Broadway: New York, NY, USA; Baltimore, MD, USA, 2018. [Google Scholar]
- Posenato, R.; Combi, C. Adding flexibility to uncertainty: Flexible Simple Temporal Networks with Uncertainty (FTNU). Inf. Sci. 2022, 584, 784–807. [Google Scholar] [CrossRef]
- Yan, H.; Chen, Y.; Yang, S. Time Allocation and Optimization in UAV-Enabled Wireless Powered Communication Networks. IEEE Trans. Green Commun. Netw. 2022, 6, 951–964. [Google Scholar] [CrossRef]
- Chang, Z.; Deng, H.; You, L. Trajectory Design and Resource Allocation for Multi-UAV Networks: Deep Reinforcement Learning Approaches. IEEE Trans. Netw. Sci. Eng. 2022, 1, 1. [Google Scholar] [CrossRef]
- Zhou, S.; Cheng, Y.; Lei, X. Resource Allocation in UAV-assisted Networks: A Clustering-Aided Reinforcement Learning Approach. IEEE Trans. Netw. Sci. Eng. 2022, 1, 1–16. [Google Scholar] [CrossRef]
- Gu, K.; Mao, Z.; Qi, M.; Duan, X.C. Finding Subgroups of UAV Swarms Using a Trajectory Clustering Method. J. Phys. Conf. Ser. 2021, 1757, 012131. [Google Scholar] [CrossRef]
- Yu, C.; Lou, X.; Ma, Y. Adaptive neural network based boundary control of a flexible marine riser systemwith output constraints. Front. Inf. Technol. Electron. Eng. 2022, 23, 1229–1238. [Google Scholar] [CrossRef]
- Wu, G.; Luo, Q.; Zhu, Y. Flexible Task Scheduling in Data Relay Satellite Networks. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1055–1068. [Google Scholar] [CrossRef]
- Lee, Y.; Lee, T. Network-based Metric for Measuring Combat Effectiveness. Def. Sci. J. 2014, 64, 115–122. [Google Scholar] [CrossRef]
- Leitao, P.; Valckenaers, P.; Adam, E. Self-Adaptation for Robustness and Cooperation in Holonic Multi-Agent Systems. In Proceedings of the 20th International Conference on Database and Expert Systems Applications, Linz, Austria, 17 August 2009. [Google Scholar]
- Sievers, M.; Madni, A.M. Agent-Based Flexible Design Contracts for Resilient Spacecraft Swarms. In Proceedings of the 54th AIAA Science and Technology 2016 Forum and Exposition, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Madni, A.M.; Ievers, M.S. A Flexible Contract-Based Design Framework for Evaluating System Resilience Approaches and Mechanisms. In Proceedings of the IIE Annual Conference and Expo, Nashville, TN, USA, 30 May–2 June 2015. [Google Scholar]
- Duan, T. A Multi-UAV Cluster Task Scheduling Method Based on Adaptive Network. Master’s Thesis, National University of Defense Technology, Changsha, China, 2020. [Google Scholar]
- Zhang, Y.; Feng, W.; Shi, G.; Jiang, F.; Chowdhury, M.; Ling, S.H. UAV Swarm Mission Planning in Dynamic Environment Using Consensus-Based Bundle Algorithm. Sensors 2020, 8, 2307. [Google Scholar] [CrossRef]
- Duan, T. Dynamic Tasks Scheduling Model for UAV Cluster Flexible Network Architecture. In Proceedings of the 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020. [Google Scholar]
- Liu, J.; Wang, W.; Li, X. A motif-based mission planning method for UAV swarms considering dynamic reconfguration. Def. Sci. J. 2018, 68, 159–166. [Google Scholar] [CrossRef]
- Francesco, L.Q.; Federico, M.; Alberto, M. Higher-order motif analysis in hypergraphs. Commun. Phys. 2022, 5, 1. [Google Scholar]
- Wang, X.; Yao, P.; Zhang, J. Distributed tasks-platforms scheduling method to holonic-C2 organization. J. Syst. Eng. Electron. 2019, 30, 110–120. [Google Scholar]
- Xun, W.; Yao, P.; Zhang, J. Dynamic resource scheduling for C2 organizations based on multi-objective optimization. IEEE Access 2019, 7, 64614–64626. [Google Scholar]
- Liu, D.; Hu, C. A dynamic critical path method for project scheduling based on a generalised fuzzy similarity. J. Oper. Res. Soc. 2021, 72, 458–470. [Google Scholar] [CrossRef]
- Alirezazadeh, S.; Luí, S.A.A. Dynamic Task Scheduling for Human-Robot Collaboration. IEEE Robot. Autom. Lett. 2022, 7, 8699–8704. [Google Scholar] [CrossRef]
- Duan, T.; Wang, W.; Tao, W. Role Assignment Mechanism of Unmanned Swarm Organization Reconstruction Based on the Fourth. Sensors 2022, 22, 8799. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Guan, Q.; Chen, W.; Ji, F.; Peng, Z. Delay-Optimal Scheduling of VMs in a Queueing Cloud Computing System with Heterogeneous Workloads. IEEE Trans. Serv. Comput. 2022, 15, 110–123. [Google Scholar] [CrossRef]
- Jia, C.; Liu, C. Simulation and Evaluation of Dynamic Workshop Scheduling Optimization Algorithm. Acad. J. Manuf. Eng. 2020, 18, 193–198. [Google Scholar]
- Mehrnoosh, S.; Javad, G. On Max-Min Fairness of Completion Times for Multi-Task Job Scheduling. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–25 June 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).