1. Introduction
A star sensor is an optical measurement device that takes stars as observation targets and outputs the attitude information of its measurement coordinate system in the inertial coordinate system, and it is the most accurate attitude sensor at present [
1,
2]. The imaging system is an important component of a star sensor, and it determines the stellar detection sensitivity and attitude measurement accuracy of the star sensor. Since complementary metal oxide semiconductor image sensors (CMOS image sensors) have the advantages of high integration and low power consumption, most star sensors use CMOS image sensors as imaging devices [
3,
4,
5]. However, CMOS image sensors in star sensors are subject to cumulative effects and single-event transients by the widespread presence of protons in space. The cumulative effects cause the degradation of image sensor parameters such as dark current, uniformity, and full well capacity [
6,
7,
8]. Moreover, protons can cause bulk defects inside the image sensor, resulting in hot pixels in the image. As the radiation fluence increases, the detection performance and accuracy of the star sensor decrease [
9]. Single-event transients produced by protons hitting CMOS image sensors appear as clusters in an image. Some of the clusters are similar to the grayscale value and shapes of stars, resulting in “false stars” in the field of view of the star sensor. The star sensor in JASON-1 can only be temporarily turned off when it is disturbed by transient clusters, and the satellite uses a gyroscope for attitude positioning [
10,
11].
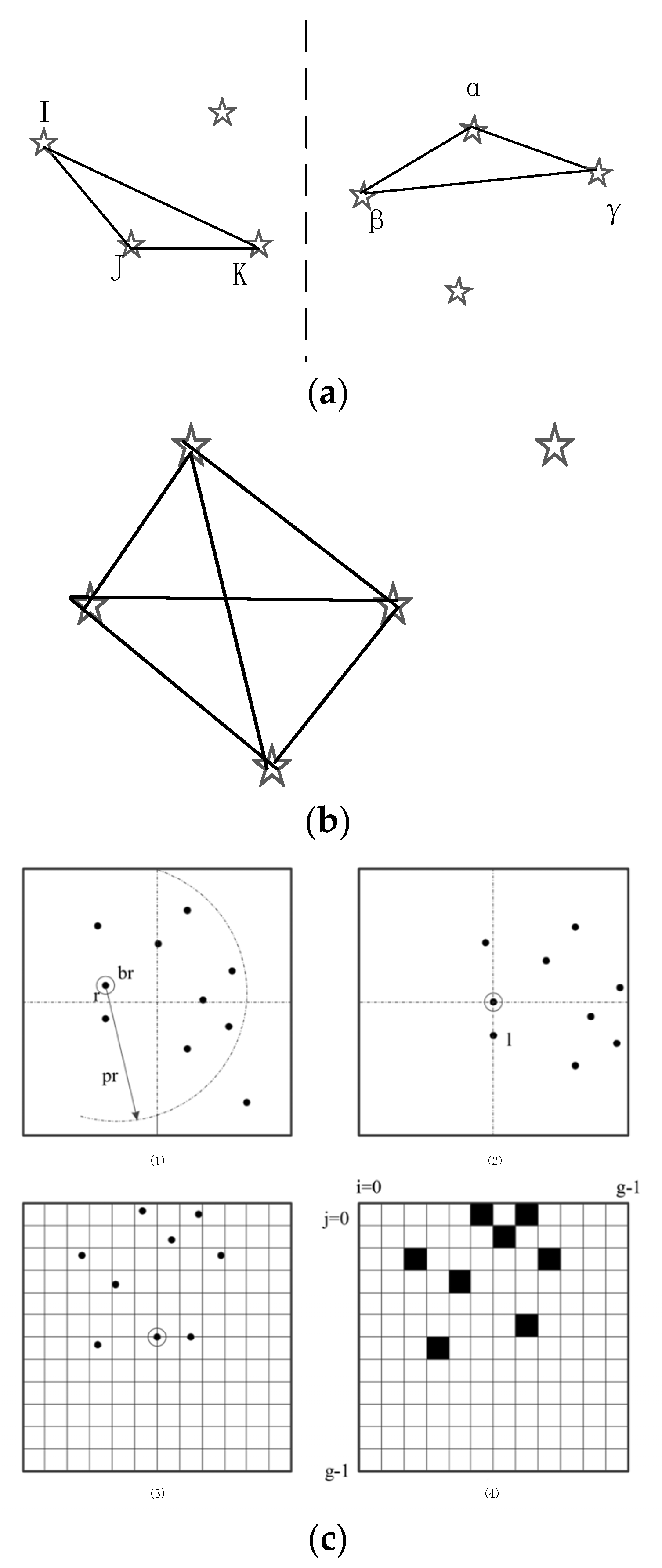
Star map recognition is the matching of stars in the current field of view of the star sensor with reference stars in the existing star catalogue, being an important prerequisite for the accurate determination of the space attitude of the spacecraft. At present, the most widely used star map recognition algorithms can be divided into sub-graph isomorphism recognition algorithms and pattern recognition algorithms [
12]. After years of development, star map recognition algorithms have greatly improved in terms of recognition accuracy and speed. However, the improvement in and research on these star map recognition algorithms are based on ideal conditions. Proton irradiation in space will degrade the performance of the image sensor and affect the recognition success rate. This will affect the output of high-precision attitude information from the star sensor. The specific impact mechanism of proton irradiation on different star map recognition algorithms has not yet been studied.
In this paper, we researched the mechanism of the cumulative effects and single-event transients caused by proton irradiation of CMOS image sensors on the star map recognition algorithm. The paper first introduces the test details and star map recognition algorithms used in this paper, then analyzes the effects of proton irradiation on the star map recognition algorithm of a star sensor such as reducing the identifiable number of stars due to the degradation of device performance caused by cumulative effects, star centroid positioning error increase by hot pixels, and “false stars” caused by single-event transients. This paper provides theoretical support for the improvement in star map recognition algorithms for long-term on-orbit star sensors.
3. Results
Figure 3a,b show respectively images of the Orion’s Belt captured by star sensor test systems with unirradiated CMOS image sensor and irradiated with a fluence of 1.47 × 10
10 p/cm
2. The nonuniformity of the image taken by the irradiated CMOS image sensor was significantly greater compared to that of the unirradiated CMOS image sensor.
Figure 3c,d show 3D point maps constructed from star maps that have been processed with low-pass filtering. The star map acquired by the unirradiated CMOS image sensor was smooth, except for the stars’ region, while the star map taken by the CMOS image sensor with an irradiation fluence of 1.47 × 10
10 p/cm
2 still had many spikes, even after the filtering process.
The above three algorithms were used to identify star maps captured by the CMOS image sensors with different irradiation fluences. It was observed that as the irradiation fluence increased, the threshold segmentation value used in the pre-processing of star maps gradually increased and the number of stars entering the identification procedure decreased. This means that the final number of stars that could eventually be correctly identified decreased. When proton irradiation fluences were 3.68 × 109 p/cm2, 1.47 × 1010 p/cm2, and 3.6 × 1010 p/cm2, the numbers of stars identified were six, four, and three, respectively. Moreover, the three recognition algorithms had different success rates. When the irradiation fluence was 1.47 × 1010 p/cm2, the grid algorithm was no longer able to output the correct recognition result. When the proton irradiance was 3.6 × 1010 p/cm2, the pyramid algorithm was unable to output a result because it requires a number of identifiable star points greater than four. The outputs of each triangular and pyramidal structure were compared with the correct SAO catalog number for each star; when the proton irradiation fluence was 1.47 × 1010 p/cm2, some of these two structures outputted the wrong results.
An image containing single-event transient bright clusters captured by the CMOS image sensor is shown in
Figure 4a. The shapes and gray values of these transient bright clusters appeared to be similar to stars, as can be seen in the figure. The average value of the gray value of each position of the 3 × 3 window centered on the maximum value was calculated. They were taken as the gray values of the single-event transient clusters in the follow-up experiment. These clusters were randomly added to the star map detected by the unirradiated image sensor. The star map after the addition of the transient star clusters is shown in
Figure 4b.
A single transient bright cluster is similar in size to a star in an image, and thus it is difficult for a small number of bright clusters to have a great impact on the threshold segmentation value of a star map. These transient clusters are recognized as identifiable stars along with true stars. As transient bright clusters are added at random locations in the map they may also overlap with real stars and affect the centroid positioning of stars. However, the probability of this being the case is low, and the corresponding treatment is now available [
16]; therefore, this paper focused on the effect of transient bright clusters as identifiable stars in terms of the star map recognition algorithm.
Three identification algorithms were used to identify the star maps with transient clusters. For the triangle and pyramid algorithms, false results occurred as the number of transient clusters increased, but the pyramid algorithm had a higher recognition success rate than the triangle algorithm. After multiple recognitions, it was found that the triangle algorithm was very sensitive to the order of stars and transient clusters entering the identification queue. When the transient bright clusters were at the end of the recognition queue, the recognition success rate was higher than at the head. For the grid algorithm, both the number of transient bright clusters and their position in the star map caused the program to output different error results. The effects of cumulative radiation damage and single-event transients on different star map identification algorithms are summarized in
Table 1.
4. Discussion
As the proton irradiation fluence increases, the oxide trap charge, interface trap charge and bulk defects in CMOS image sensors increase. The oxide trap charge is mainly distributed in the shallow trench isolation (STI) region and gate oxide region, while the interface trap charge is mainly distributed at the Si-SiO
2 interface. These charges will increase the dark current of the image sensor, resulting in an increase in the background gray value in star maps. Bulk defects caused by displacement damage effects can generate new energy levels [
17]. Some defect levels act as generation–recombination centers, thereby increasing the dark signal value. Some pixels have a higher dark current value (hot pixels), resulting in bright spots that occupy one pixel in the image [
18]. The difference in dark signals between different pixels will reduce pixel uniformity, resulting in an increase in the standard deviation of the star map. Since the threshold segmentation value used in the pre-processing is the average grayscale value of the star map plus three times the standard deviation, it increases as the irradiation fluences increase. Moreover, the decrease in quantum efficiency of the CMOS image sensor after proton irradiation can lead to a decrease in the grayscale value of star areas. If the grayscale value of a star is less than the segmentation threshold, the star will not be selected. This is the main reason for the decrease in identifiable star caused by proton irradiation.
The reduction in the number of identifiable stars only affects the final output count of stars for the triangle algorithm and pyramid algorithm, without generating any incorrect output results. When the proton irradiation fluence was 3.6 × 1010 p/cm2, there were only three identifiable stars in the star map, which did not meet the minimum requirement of the pyramid algorithm, so the pyramid algorithm did not output any results. The recognition success rate of the grid algorithm was affected by the pattern vectors built by the star map. The decrease in the number of identifiable stars will result in changes to the pattern vectors, which will affect the recognition success rate. If the nearest star S2 is not the one used to build the grid pattern database, it will result in errors in the rotation of the star map, generate completely wrong pattern vectors, and output incorrect recognition results.
The reason for the wrong identification results for some of the triangular and pyramidal structures at a proton irradiation fluence of 1.47 × 10
10 p/cm
2 was related to the hot pixels. In previous research, it was discovered that the noise caused by the total ionizing dose effect can lead to an increase in star centroid positioning error through the diagonal distance relationship between star pairs [
19]. However, the hot pixels generated by the displacement damage can have a greater impact on the star centroid positioning accuracy. In the star maps taken by the CMOS image sensor with a proton irradiation fluence of 1.47 × 10
10 p/cm
2, the initial position of a star in relation to a hot pixel is depicted in
Figure 5a. Here, the red box is the hot pixel, which is far away from the star and does not affect the accuracy of star centroid positioning; however, the position of the star in the star map was changed by the rotation of the Earth, and thus the hot pixel gradually came closer to the star (
Figure 5b–d). The distribution of the grayscale value of the star was also changed.
Without the influence of hot pixels, the energy distribution of a star approximately obeys a two-dimensional Gaussian distribution, as shown in Equation (4).
In Equation (4),
represents the energy of the star whose center is () at (), is the total energy of the star, and is the Gaussian dispersion radius. The of this star sensor is 0.8. In order to prevent the saturation of the grayscale value of the center pixel of the star from affecting the centroid positioning, the exposure time of the image sensor was adjusted so that the center gray value of the lowest magnitude star was about 80% of the saturation gray value of the image sensor. This paper further analyzed the influence of a hot pixel on the centroid positioning of star from the different positional relationships and the grayscale value between a hot pixel and a star.
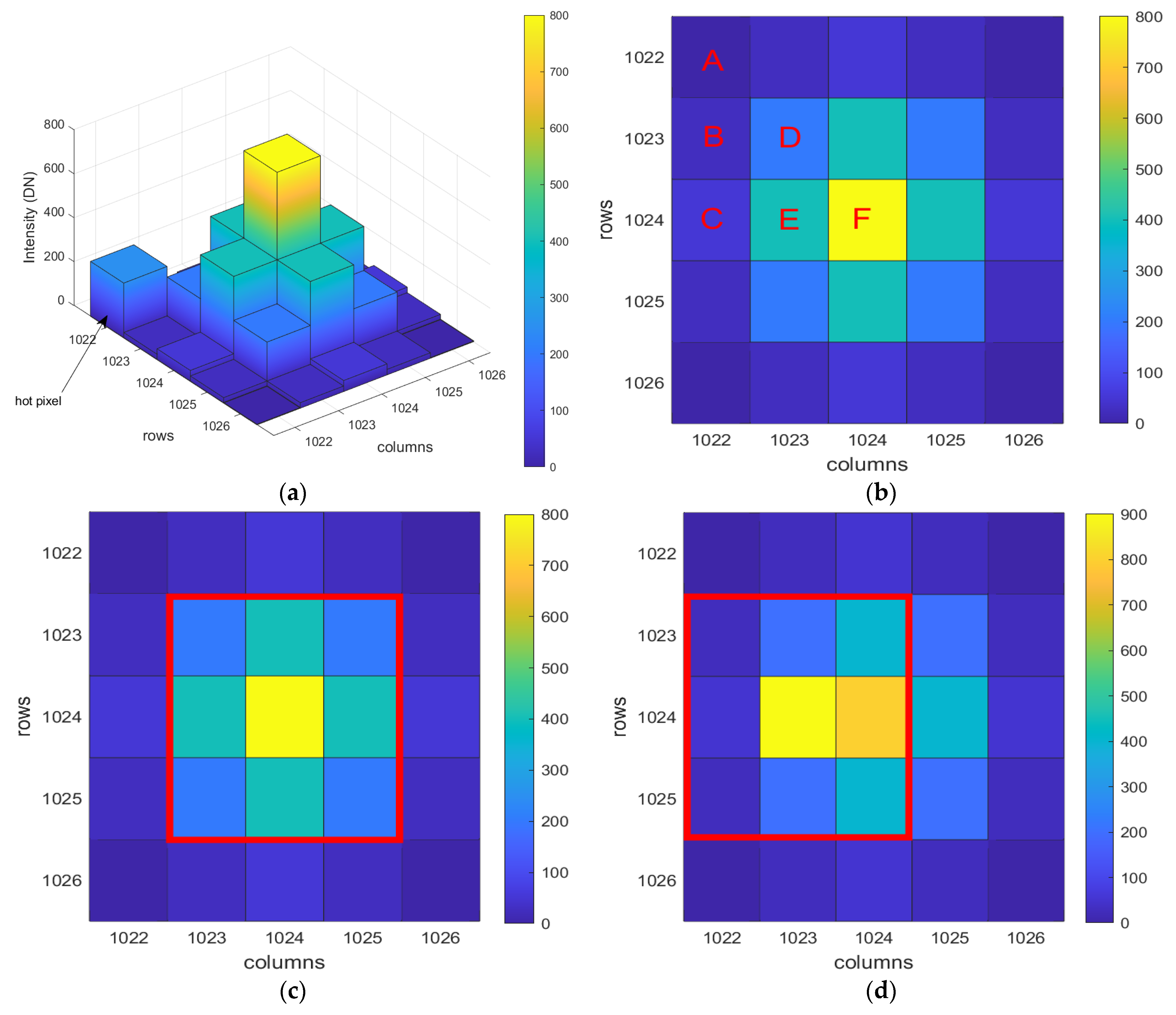
The grayscale value of each position within the 3 × 3 window of the star point is calculated according to Equation (4).
Figure 6a shows the model of the impact of a hot pixel on it. When obtaining the centroid position of a star in the image, it will first locate the pixel position with the largest grayscale value in the area; select a 3 × 3 window with it as the center; and then use different centroid positioning algorithms to extract the centroid coordinates of the star point as needed, such as the centroid algorithm, square centroid algorithm, Gaussian centroid algorithm, and other algorithms. Due to the different calculation methods of these centroid positioning algorithms, the different centroid positioning algorithms also lead to different centroid positioning errors of a star. Due to the different calculation methods of these centroid positioning algorithms, the resulting centroid positioning errors will also be different.
According to the symmetry of the distribution of the star grayscale value and the size of the centroid positioning window, there are six cases of the influence of the hot pixels on the distribution of the star, as shown in
Figure 6b. Among them, the F case mainly changed the Gaussian dispersion radius. For the cases D and E where the hot pixel was within the original window, the change of the grayscale value in the window led to an error of the centroid positioning of the star. When the grayscale value of a hot pixel was lower than that at the center of the star, the centroid positioning window remains the same as shown in the red box in
Figure 6c. However, if the grayscale value of the hot pixel was higher than that of the center of the star, the center of the positioning window shifted to the location of the hot pixel. This is shown in
Figure 6d. For cases A, B, and C outside the window, centroid positioning error will occur only when the grayscale value of the hot pixel is higher than the grayscale value of the star center.
The centroid position (
) is calculated using different centroid positioning methods for the five cases, and the error of centroid positioning
is calculated according to Equation (5). The result is shown in
Figure 7.
It can be seen from
Figure 7 that in the case of D and E, the error of centroid positioning increased with the increase in the grayscale value of the hot pixel. After the grayscale value of the hot pixel exceeded the grayscale value of the center of the star, the error of centroid positioning increased sharply due to the movement of the centroid positioning window, but in these cases, the centroid error calculated by the centroid positioning algorithm was within one pixel. In the case of A, B, and C, since the change of the grayscale value of the hot pixel did not affect the grayscale distribution of the star in the original window, only after the gray-scale value exceeds the grayscale value of the center of the star will the centroid positioning window move, and the error of centroid positioning occur. In these cases, the error of centroid positioning of the star was larger than one pixel, and the maximum error of centroid positioning calculated by the square centroid method exceeded 2.7 pixels. In all cases, the higher the grayscale value of the hot pixel and the farther the distance from the center of the star, the larger the error of centroid positioning; under the same influence conditions, the error of centroid positioning calculated by the Gaussian centroid algorithm is the smallest. Moreover, high-magnitude stars in the field of view have a lower grayscale value, and are more likely to be affected by hot pixels.
Taking the star Alnilam (SAO 132346) affected by a hot pixel in
Figure 5 as an example, the right ascension and declination of another star Saiph in the field of view and this star were (
) = (86.93914, −9.66968), (
) = (84.05338, −1.20196), and the theoretical cosine value of the diagonal distance
between the two stars can be calculated by Equation (2).
The focal length of the star sensor test system was 24.048 mm, and the coordinates of the principal point obtained by calibration were (
) = (1093.379, 1207.317). The coordinates of these two stars in the map were calculated to be (1505.018, 1410.990), (915.000, 1066.081), and then the cosine value of measured diagonal distance
between the two stars was calculated by Equation (3).
The difference between the
and
was 0.000027, exceeding the allowable error (0.000025), and thus it is impossible for this pair of stars to be correctly identified in the formed triangle and pyramid structure. In the star map not affected by the hot pixel, the coordinates of the center of the two stars were (1504.98, 1411.015) and (914.153, 1066.941), respectively. The calculated value from them is 98,786,586. The difference between the theoretical cosine values was 0.0000168. Therefore, these two stars can be correctly identified in the pyramid and triangle structures. On the basis of the matching results of Alnilam and all other stars, the error of the cosine value of the diagonal distance between the two stars would increase as the cosine value of the two stars decreased. That is, when the two stars in the map are far away from each other, a small positioning error generated by a hot pixel will have a large effect on the cosine value of the diagonal distance of the two stars. For the grid algorithm, it is difficult for a star to move from its original grid to other grids due to a small centroid offset. Therefore, the centroid error caused by hot pixels will not significantly affect the recognition success rate of the grid algorithm. Although annealing can reduce proton radiation damage to image sensors [
20], it is difficult to install annealing devices in star sensors. The local threshold segmentation algorithm can be used instead of global thresholding in the pre-processing. This is effective for stars with lower magnitudes. For centroid positioning error caused by hot pixels, the allowable error
used in recognition can be slightly increased based on the need to consider the speed of the recognition algorithm.
Incoming particles generate electron–hole pairs in the sensitive silicon volume through direct or indirect ionization [
21]. Direct ionization means that the proton excites and releases off-core electrons of the Si atom through Coulomb interaction with Si, directly generating electron–hole pairs. Indirect ionization means that the proton generates new charged secondary particles through nuclear reactions, and these secondary particles continue to generate electron–hole pairs through either direct or indirect ionization. Part of the charge generated by the proton incident is collected by the depletion region of the pixel unit during the integration stage of the image sensor [
22]. Due to the difference in the potential of the region before and after the integration time, the grayscale value of the pixel changes. Some of the charge is also collected by other pixel cells through diffusion, appearing as bright clusters in the image. Unlike the stars on a star map which generally remains at the same position for several consecutive frames, the transient cluster is related to the incident position of the proton and only exists in one frame.
After analyzing the output of the triangle algorithm, it was found that in a triangular structure composed of a single-event transient cluster and stars or other transient clusters, if the calculated diagonal distance is within allowable error ε and the result is unique, it will lead to an incorrect recognition result. If the transient clusters are at the head of the identification queue, they will form a triangular structure with other stars and transient clusters in the recognition queue multiple times for recognition, leading to a higher probability of outputting incorrect recognition results. While the transient cluster is at the end of the recognition queue, the transient cluster has less influence on the result because the recognition has been completed between the stars in the star map. The recognition success rate of the pyramid algorithm is improved because it needs to judge three more sets of diagonal distances than the triangle algorithm, and this algorithm will introduce other stars to validate the recognition results. After analyzing the results of all pyramid structure outputs, it was found that if there is one transient cluster in the pyramid structure, the recognition result is usually not output because the condition of six sets of diagonal distance matching cannot be satisfied. However, incorrect matching results may be output in pyramid structures composed of multiple transient clusters, but these incorrect results will be discarded in the subsequent verification process, and a small number of transient clusters have no effect on the final recognition results. Transient clusters can cause the grid algorithm to output incorrect results in two ways. The first way is that transient clusters are incorrectly selected as the reference star S1 or closest-neighbor star S2, which will cause the star map to be incorrectly rotated and generate completely incorrect mode vectors. The second way is that even if both the reference star and closest-neighbor star are real stars, but there are transient clusters in some grids. It will also generate incorrect pattern vectors. The algorithm of increasing the judgment conditions to verify clusters multiple times is effective when there are few clusters. But the time consumed by this algorithm will significantly increase as the number of clusters increases. By utilizing the characteristic that transient clusters exist in only one frame at the same position in the image, it is possible to distinguish them from stars [
23]. However, since this algorithm requires the collection of multiple sets of star maps, the posture output frequency may be reduced.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}