
Disturbance-Rejection Passivity-Based Control for Inverters of Micropower Sources

 ,
,
Abstract
:1. Introduction
2. Modelling of the Inverter
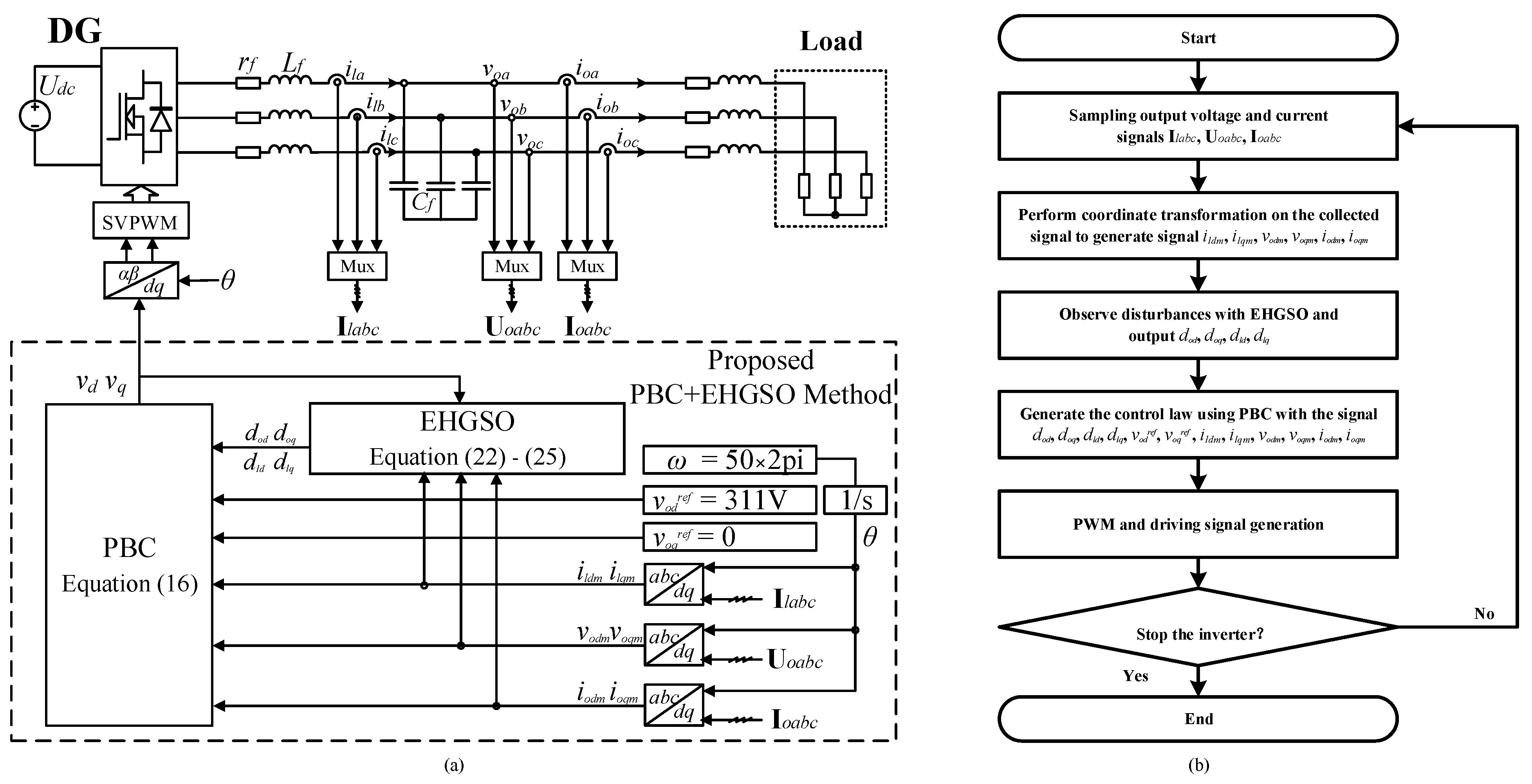
3. Design of the Proposed Disturbance-Rejection Passivity-Based Control
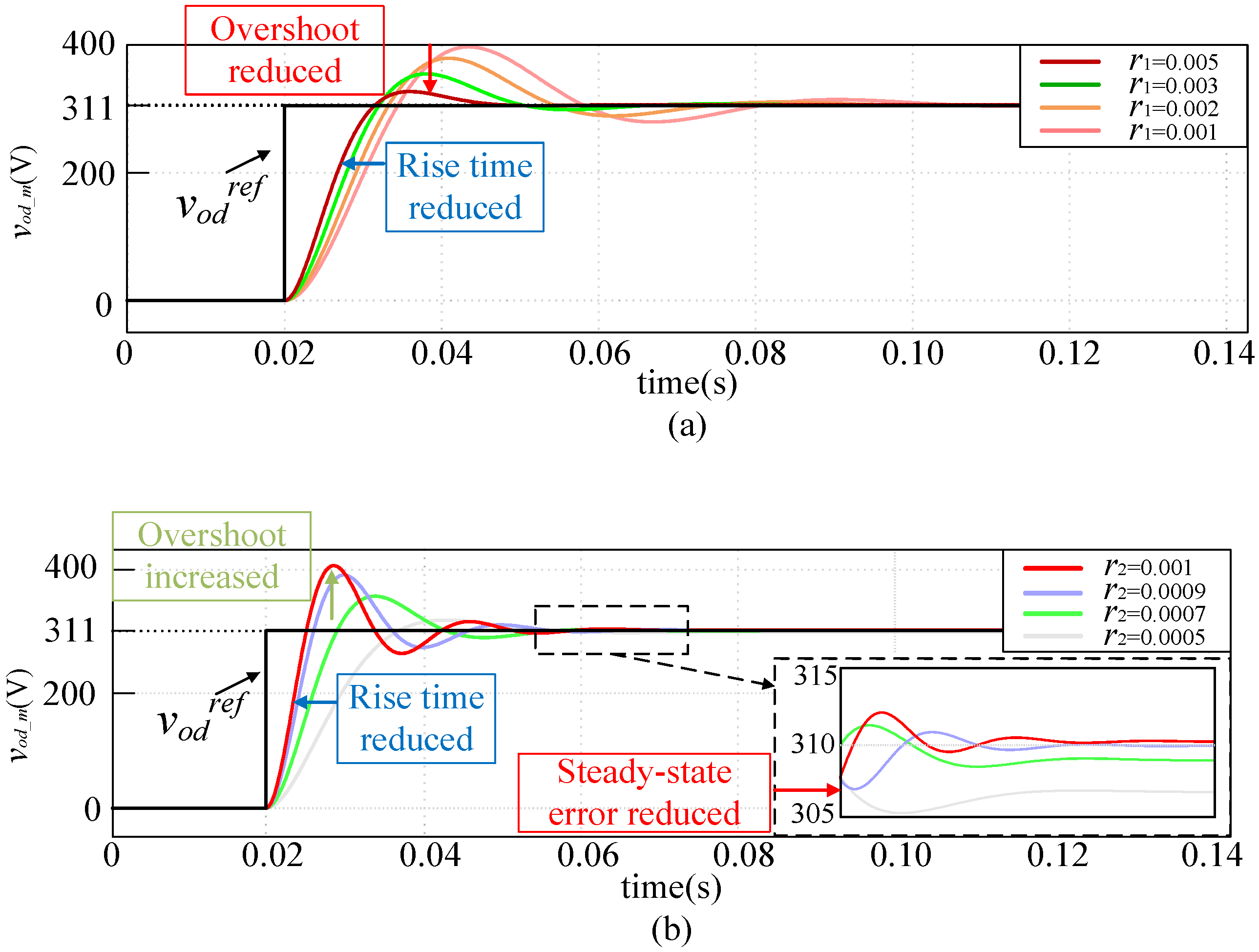
3.1. Design of the Proposed Passivity-Based Control
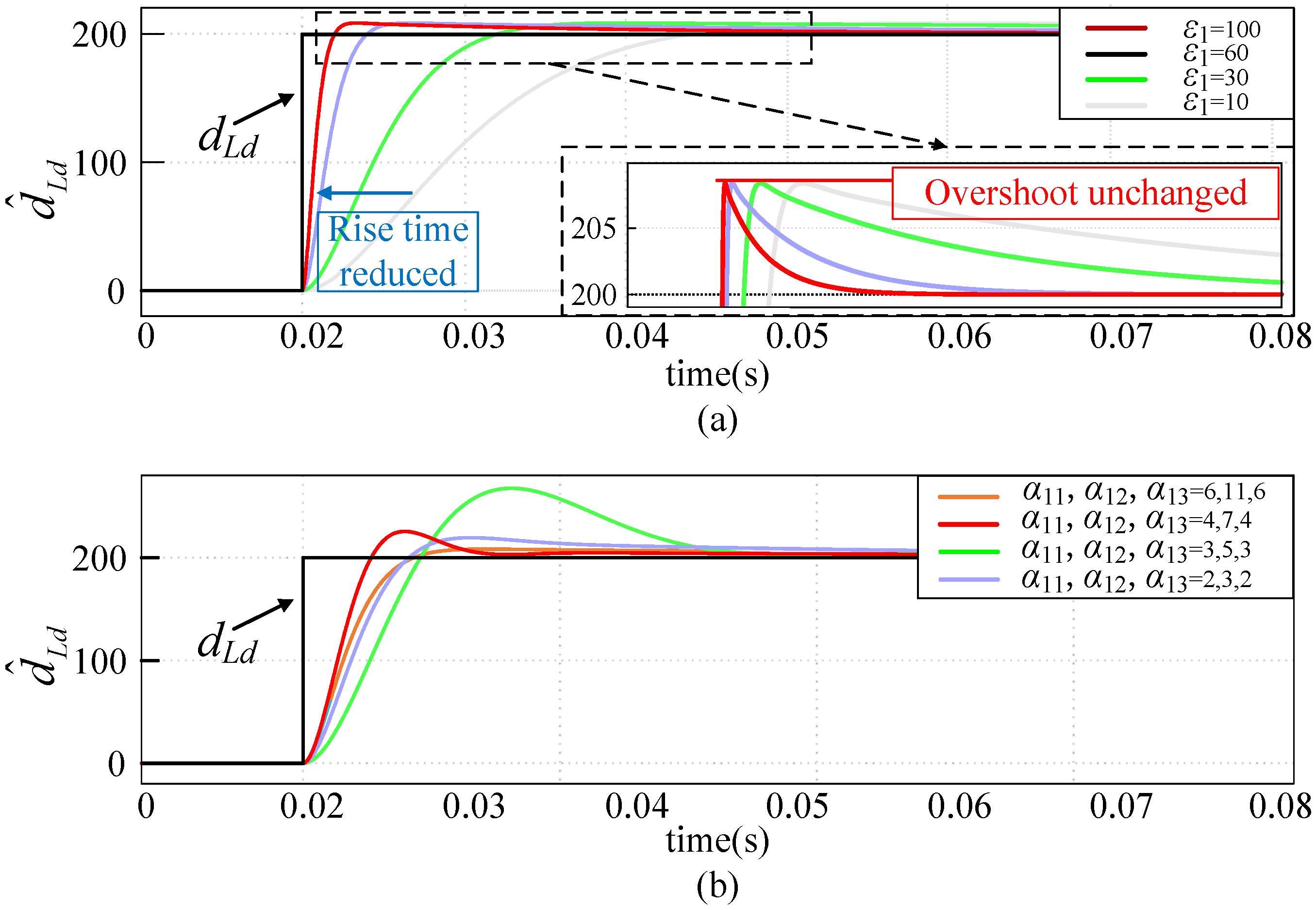
3.2. Design of the Extended High-Gain State Observer
4. Experiments
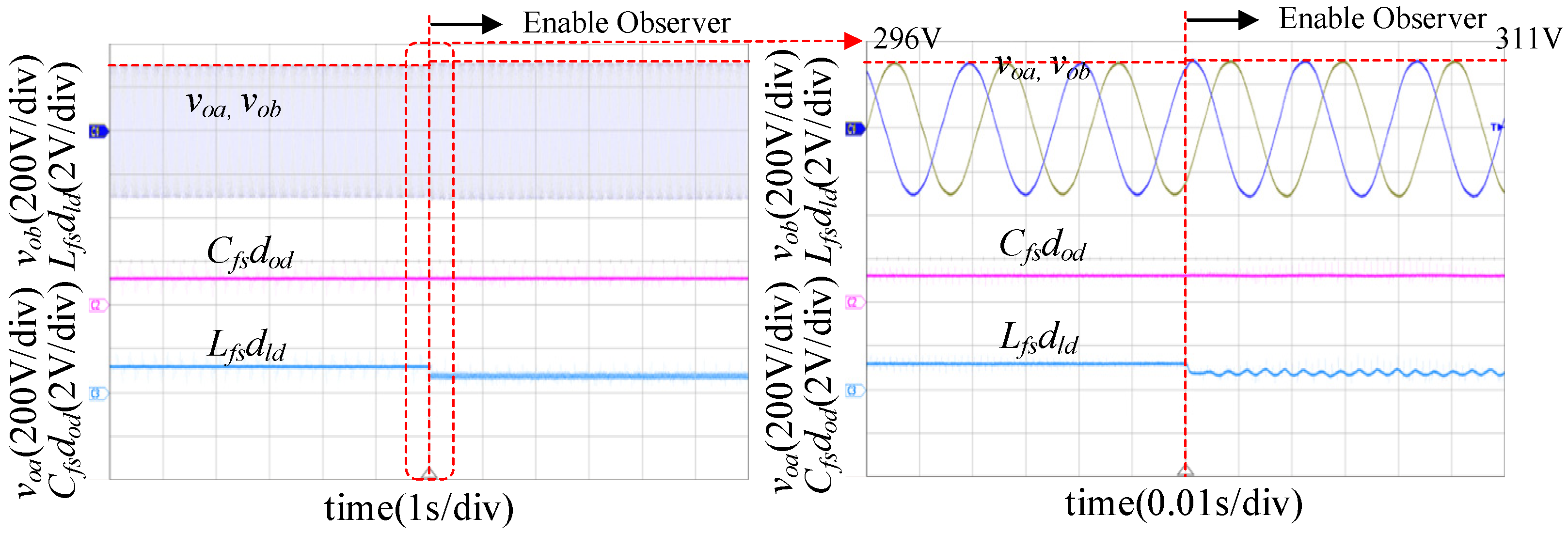
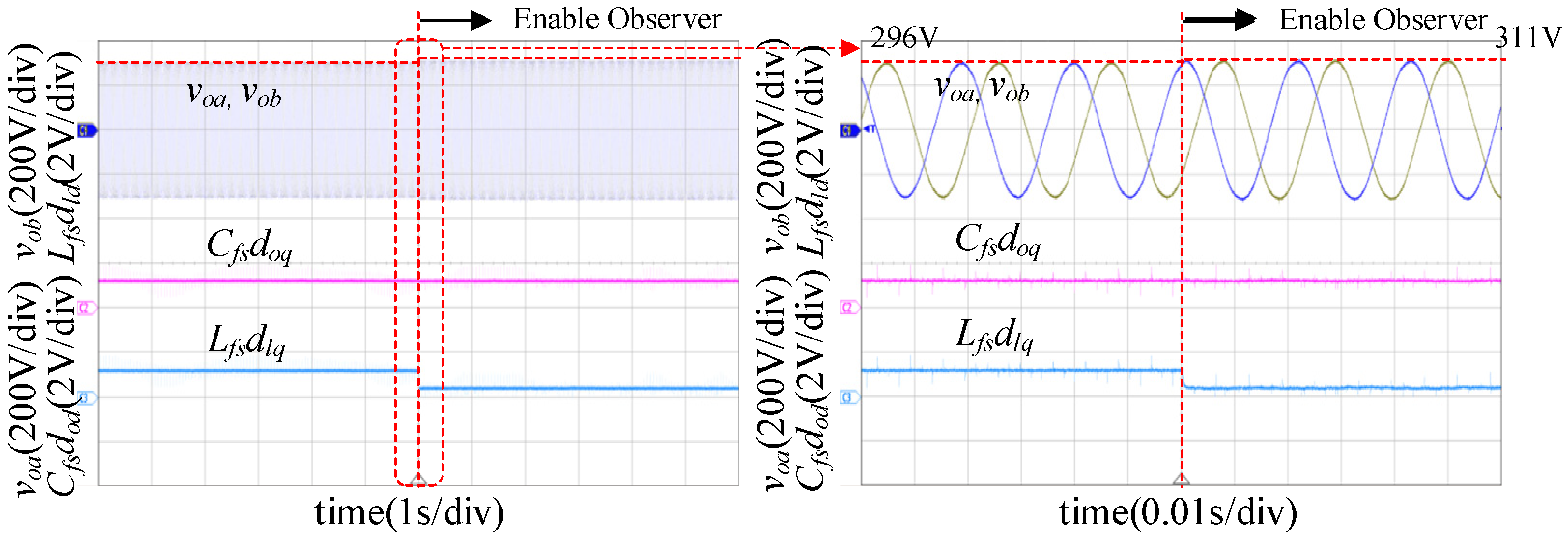
4.1. Experimental Results of the Inverter with and without the Observer
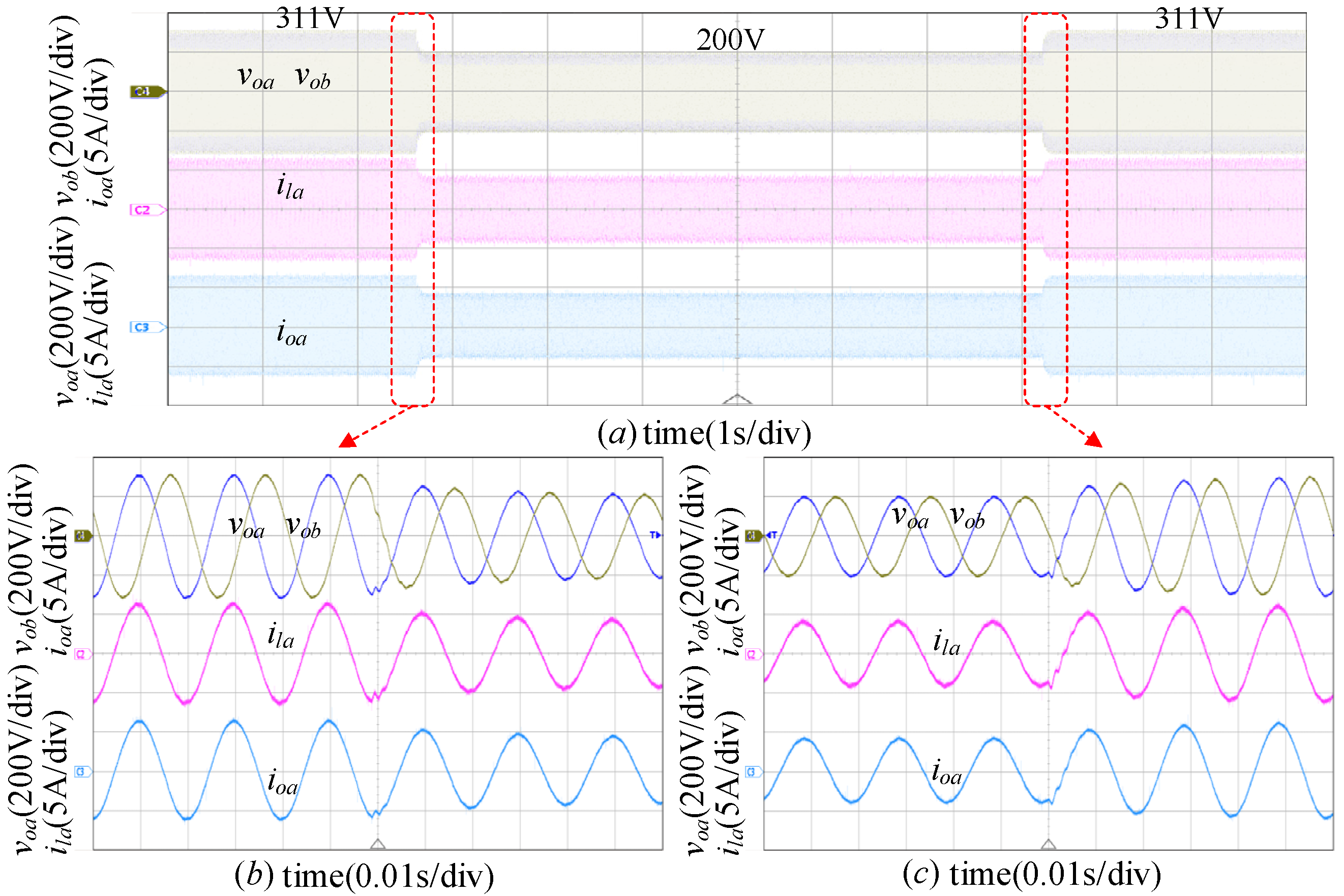
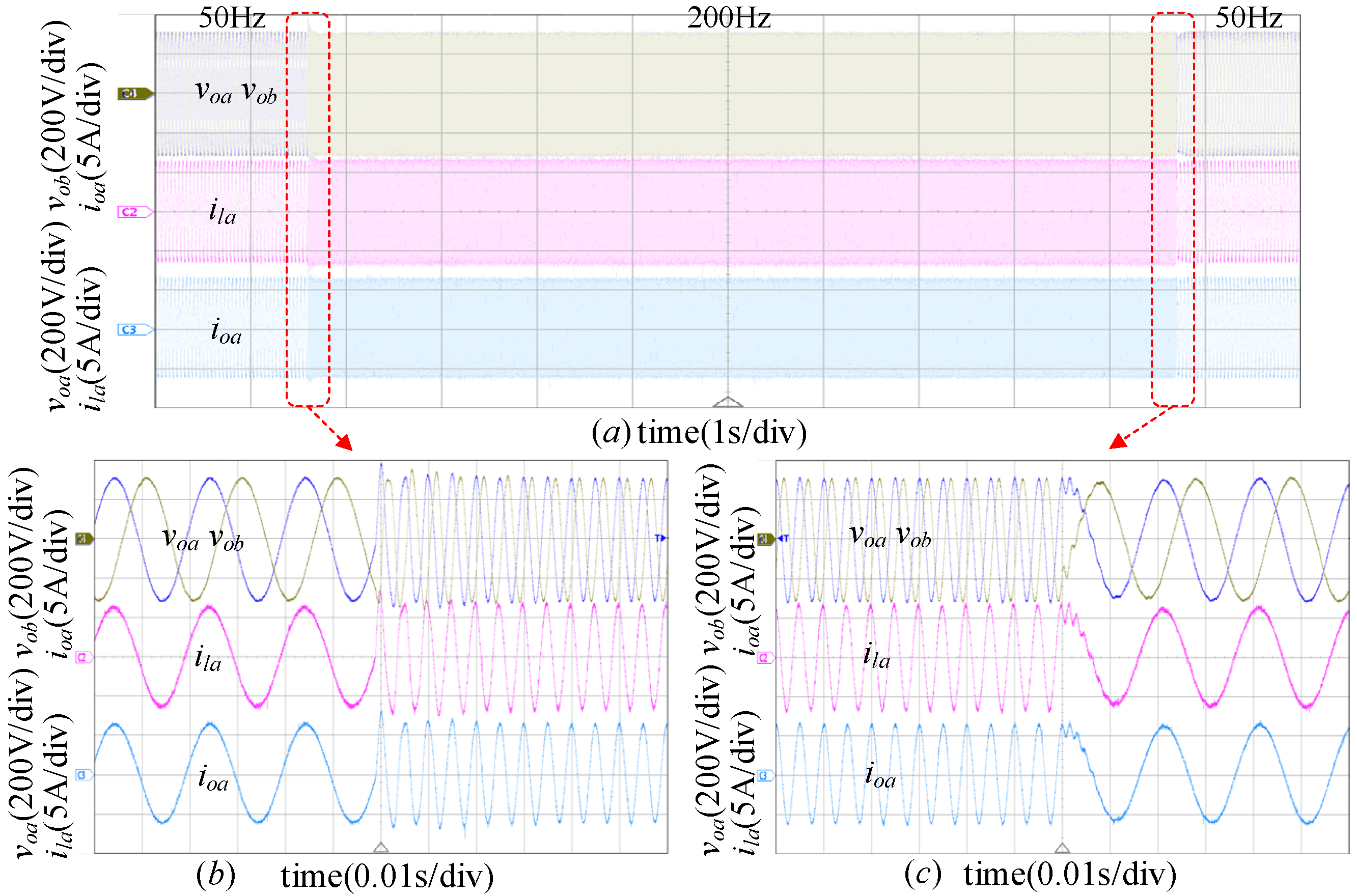
4.2. Voltage and Frequency Adjusting Performances
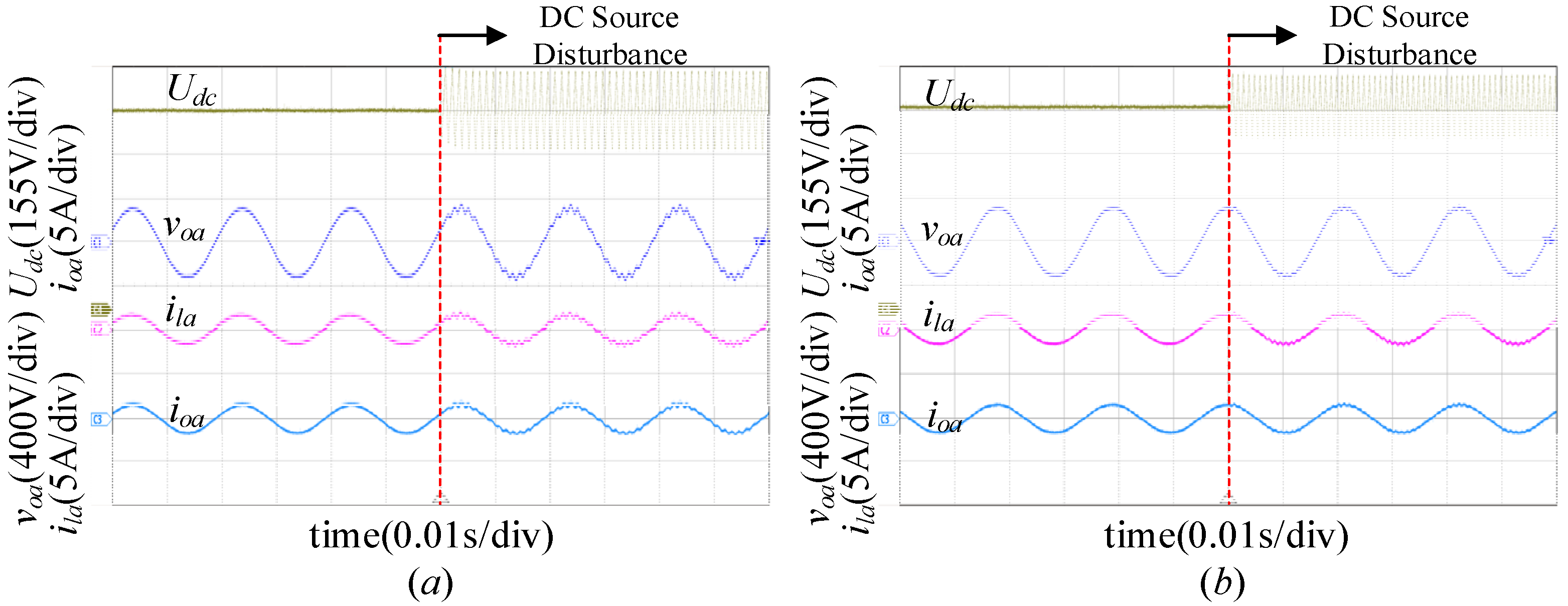
4.3. Comparisons of the Inverter’s Performances with Proposed PBC and PI Controllers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Uddin, M.; Mo, H.; Dong, D.; Elsawah, S.; Zhu, J.; Guerrero, J.M. Microgrids: A review, outstanding issues and future trends. Energy Strategy Rev. 2023, 49, 101127. [Google Scholar] [CrossRef]
- Hasheminasab, S.; Alzayed, M.; Chaoui, H. A Review of Control Techniques for Inverter-Based Distributed Energy Resources Applications. Energies 2024, 17, 2940. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhai, Z.; Mao, M.; Wang, S.; Sun, S.; Mei, D.; Hu, Q. Control and Intelligent Optimization of a Photovoltaic (PV) Inverter System: A Review. Energies 2024, 17, 1571. [Google Scholar] [CrossRef]
- Hosseinzadeh, N.; Aziz, A.; Mahmud, A.; Gargoom, A.; Rabbani, M. Voltage stability of power systems with renewable-energy inverter-based generators: A review. Electronics 2021, 10, 115. [Google Scholar] [CrossRef]
- Fazal, S.; Haque, M.E.; Arif, M.T.; Gargoom, A.; Oo, A.M.T. Grid integration impacts and control strategies for renewable based microgrid. Sustain. Energy Technol. Assess. 2023, 56, 103069. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Li, Y.; Meng, K.; Dong, Z.Y.; Zhang, W. Sliding framework for inverter-based microgrid control. IEEE Trans. Power Syst. 2020, 35, 1657–1660. [Google Scholar] [CrossRef]
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-signal stability analysis of an inverter-based microgrid with internal model-based controllers. IEEE Trans. Smart Grid 2017, 9, 5393–5402. [Google Scholar] [CrossRef]
- Peng, Y.; Shuai, Z.; Liu, X.; Li, Z.; Guerrero, J.M.; Shen, Z.J. Modeling and stability analysis of inverter-based microgrid under harmonic conditions. IEEE Trans. Smart Grid 2019, 11, 1330–1342. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Wu, W.; Wang, Y.; Gong, W.; Guerrero, J.M. Frequency coupling admittance modeling of quasi-PR controlled inverter and its stability comparative analysis under the weak grid. IEEE Access 2021, 9, 94912–94922. [Google Scholar] [CrossRef]
- Yadav, M.; Jaiswal, P.; Singh, N. Fuzzy Logic-Based Droop Controller for Parallel Inverter in Autonomous Microgrid Using Vectored Controlled Feed-Forward for Unequal Impedance. J. Inst. Eng. (India) Ser. B 2021, 102, 691–705. [Google Scholar] [CrossRef]
- Habib, M.; Ladjici, A.A.; Harrag, A. Microgrid management using hybrid inverter fuzzy-based control. Neural Comput. Appl. 2020, 32, 9093–9111. [Google Scholar] [CrossRef]
- Yang, Y.; Wai, R.J. Design of adaptive fuzzy-neural-network-imitating sliding-mode control for parallel-inverter system in islanded micro-grid. IEEE Access 2021, 9, 56376–56396. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Li, S.; Si, J.; Gao, J.; Dong, W.; Das, H.S. Virtual synchronous generator and SMC-based cascaded control for voltage-source grid-supporting inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 2722–2736. [Google Scholar] [CrossRef]
- Heins, T.; Joševski, M.; Gurumurthy, S.K.; Monti, A. Centralized model predictive control for transient frequency control in islanded inverter-based microgrids. IEEE Trans. Power Syst. 2022, 38, 2641–2652. [Google Scholar] [CrossRef]
- Liu, E.; Han, Y.; Zalhaf, A.S.; Yang, P.; Wang, C. Performance evaluation of isolated three-phase voltage source inverter with LC filter adopting different MPC methods under various types of load. Control Eng. Pract. 2023, 135, 105520. [Google Scholar] [CrossRef]
- Zeng, J.; Huang, Z.; Huang, Y.; Qiu, G.; Li, Z.; Yang, L.; Yang, B.; Yu, T. Modified linear active disturbance rejection control for microgrid inverters: Design, analysis, and hardware implementation. Int. Trans. Electr. Energy Syst. 2019, 29, e12060. [Google Scholar] [CrossRef]
- Shi, H.; Zhou, J.; Zhang, J.; Feng, K.; Su, G. A voltage recovered control strategy for microgrid inverters based on Narendra-MRAC. Meas. Control 2023, 56, 403–410. [Google Scholar] [CrossRef]
- Zhao, E. Research on Multi-Scale Instability Mechanism and Robust Passivity Control Method for Isolated Microgrids. Ph.D. Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2023. [Google Scholar]
- Zhao, J.; Wu, W.; Gao, N.; Wang, H.; Chung, H.S.H.; Blaabjerg, F. Combining passivity-based control with active damping to improve stability of LCL filtered grid-connected voltage source inverte. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018. [Google Scholar]
- Zonetti, D.; Bergna-Diaz, G.; Ortega, R.; Monshizadeh, N. PID passivity-based droop control of power converters: Large-signal stability, robustness and performance. Int. J. Robust Nonlinear Control 2022, 32, 1769–1795. [Google Scholar] [CrossRef]
- Lai, J.; Yin, X.; Jiang, L.; Yin, X.; Wang, Z.; Ullah, Z. Disturbance-observer-based PBC for static synchronous compensator under system disturbances. IEEE Trans. Power Electron. 2019, 34, 11467–11481. [Google Scholar] [CrossRef]
- Lee, T.S. Lagrangian modeling and passivity-based control of three-phase AC/DC voltage-source converters. IEEE Trans. Ind. Electron. 2004, 51, 892–902. [Google Scholar] [CrossRef]
- Freidovich, L.B.; Khalil, H.K. Performance recovery of feed-back-linearization-based designs. IEEE Trans. Autom. Control 2008, 53, 2324–2334. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Strategies | Advantages | Shortcomings |
|---|---|---|---|
| [7,8] | PI |
|
|
| [9,10] | PR |
|
|
| [11,12] | Fuzzy control |
|
|
| [13,14] | Sliding mode control |
|
|
| [15,16] | MPC |
|
|
| [17] | ADRC |
|
|
| [18] | Adaptive control |
|
|
| [19,20,21] | PBC |
|
|
| Symbol | Value |
|---|---|
| Nominal DC voltage Udc/V | 700 |
| Switching frequency F/kHz | 15 |
| The power rating of the inverter Pp/kW | 15 |
| Phase voltage Unrms/V | 220 |
| Filter inductor Lf/mH | 1.5 |
| Equivalent series resistance of filter inductor rf/mΩ | 80 |
| Filter capacitor Cf/µF | 15 |
| Symbol | Value |
|---|---|
| Virtual damping resistor r1 | 0.005 |
| Virtual damping resistor r2 | 0.001 |
| Coefficients of observer α11, α21, α31, α41 | 6 |
| Coefficients of observer α12, α22, α32, α42 | 11 |
| Coefficients of observer α13, α23, α33, α43 | 6 |
| Observer scaling gains e1, e2 | 100 |
| Observer scaling gains e3, e4 | 10 |
| Symbol | Value |
|---|---|
| Proportional gain of current loop PI controller kpi | 15 |
| Integral gain of current loop PI controller kii | 400 |
| Proportional gain of voltage loop PI controller kpv | 0.045 |
| Integral gain of voltage loop PI controller kiv | 45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Tu, L.; Cai, H.; Gu, H.; Chen, J.; Jia, G.; Zhu, X. Disturbance-Rejection Passivity-Based Control for Inverters of Micropower Sources. Electronics 2024, 13, 2851. https://doi.org/10.3390/electronics13142851
Luo C, Tu L, Cai H, Gu H, Chen J, Jia G, Zhu X. Disturbance-Rejection Passivity-Based Control for Inverters of Micropower Sources. Electronics. 2024; 13(14):2851. https://doi.org/10.3390/electronics13142851
Chicago/Turabian StyleLuo, Chao, Liang Tu, Haiqing Cai, Haohan Gu, Jiawei Chen, Guangyu Jia, and Xinke Zhu. 2024. "Disturbance-Rejection Passivity-Based Control for Inverters of Micropower Sources" Electronics 13, no. 14: 2851. https://doi.org/10.3390/electronics13142851