
A Data-Driven Control for Modular Multilevel Converters Based on Model-Free Adaptive Control with an Event-Triggered Scheme

Abstract
:1. Introduction
- Simple control structure: This method combines an event-triggered mechanism with model-free adaptive control, eliminating the reliance on a system’s mathematical model and complex observer construction processes. This simplifies control algorithm design and reduces the computational burden.
- High computational efficiency: This method avoids the complex process of rolling optimization of the cost function. Furthermore, the event-triggered mechanism only updates the control signal when the event-triggered error exceeds a certain threshold. Compared to FCS-MPC, the proposed method reduces program execution time by 20%, efficiently enhancing computational efficiency.
- Robust performance: Due to its independence from precise mathematical models, this method achieves the control objective based solely on system input and output data, making it robust against model uncertainties and external disturbances.
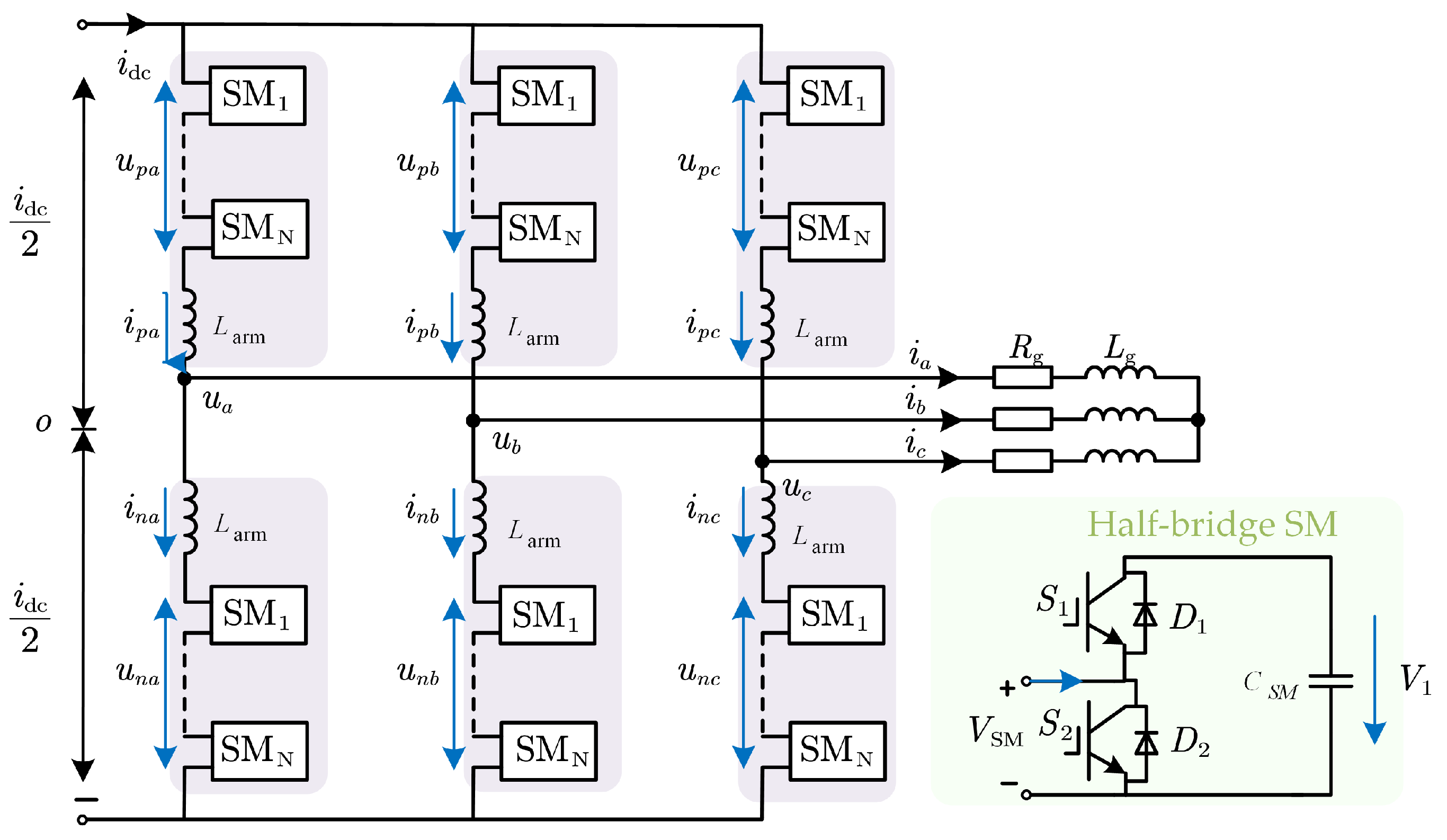
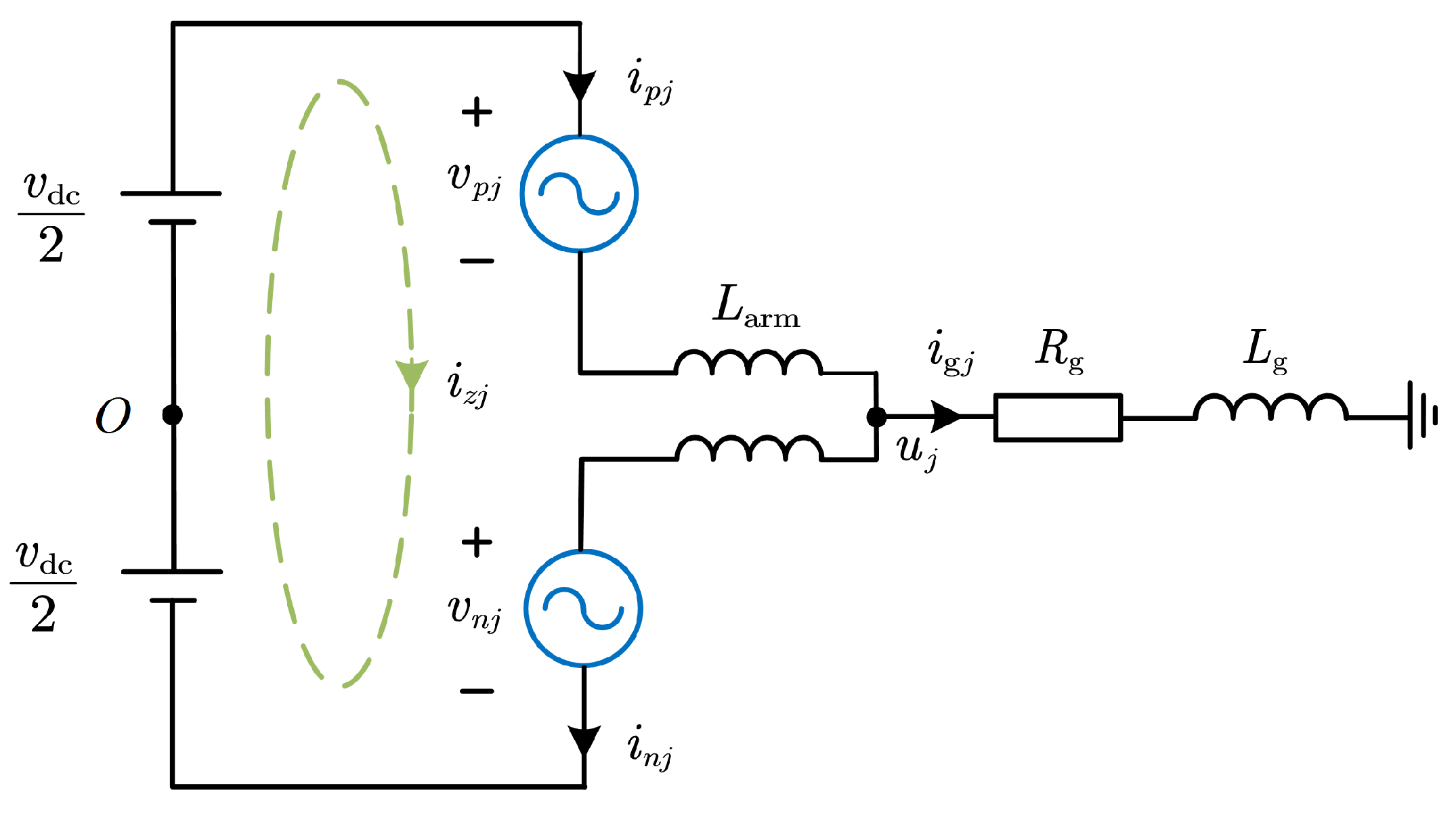
2. System and Modeling
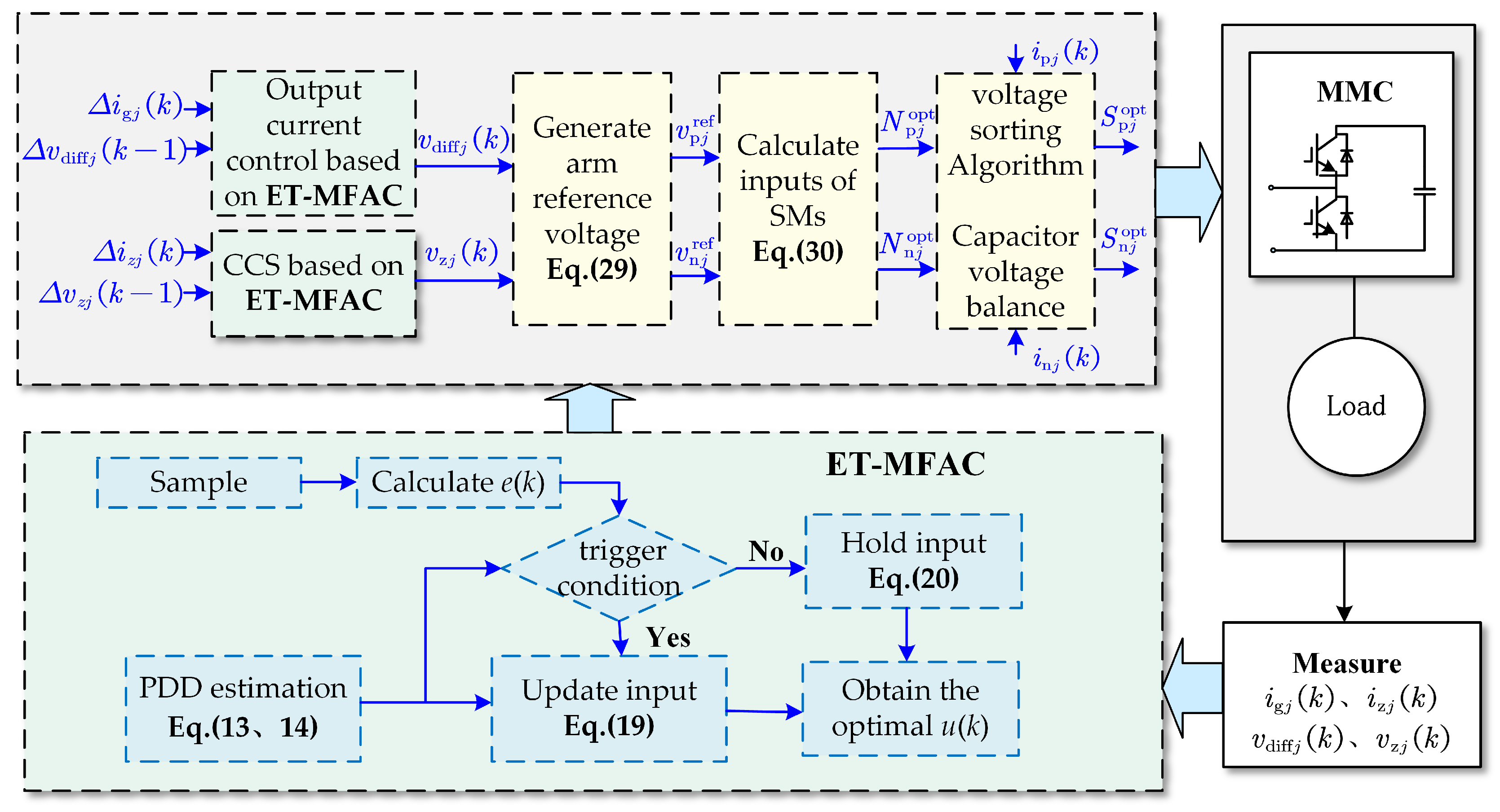
3. Proposed ET-MFAC Control for MMC
3.1. Model-Free Adaptive Control
3.2. Event-Triggering Mechanism
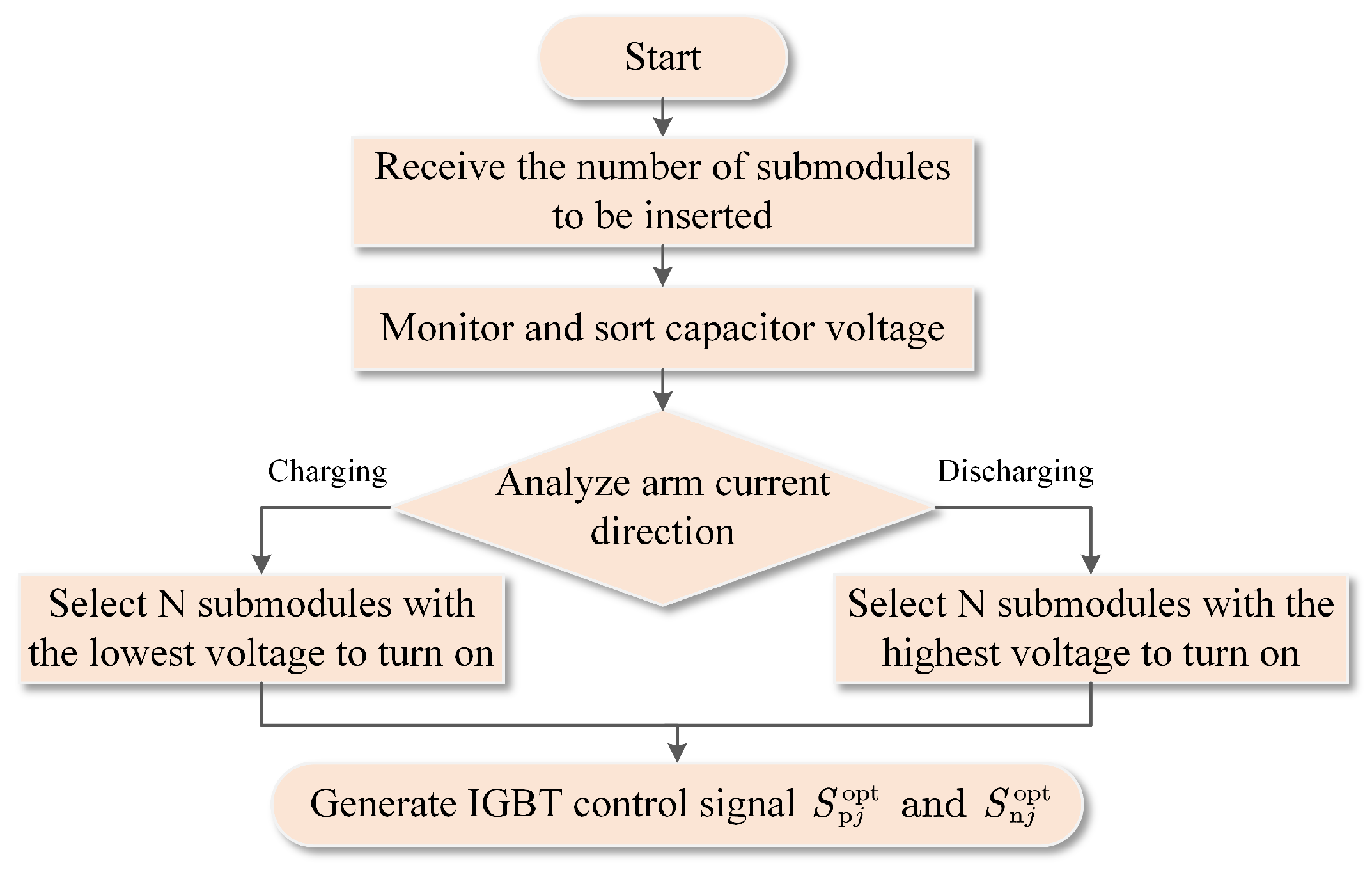
3.3. Specific Design of ET-MFAC for MMC Applications
| Algorithm 1 Model-free adaptive control with event-triggered mechanism for MMC |
|
4. Results and Analysis
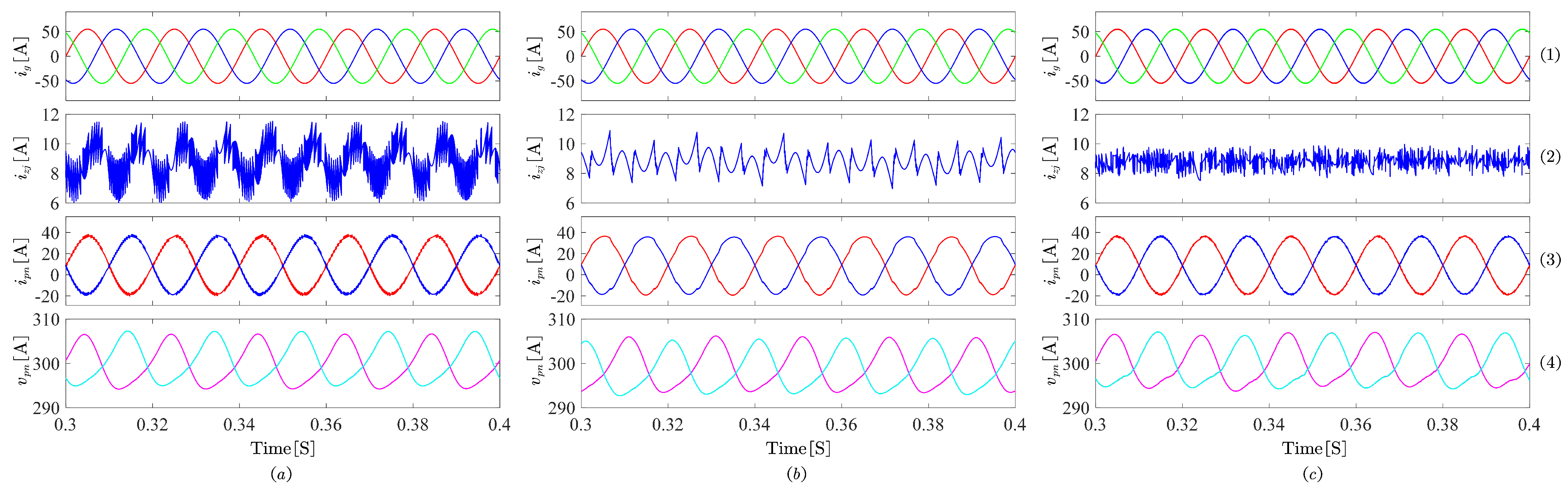
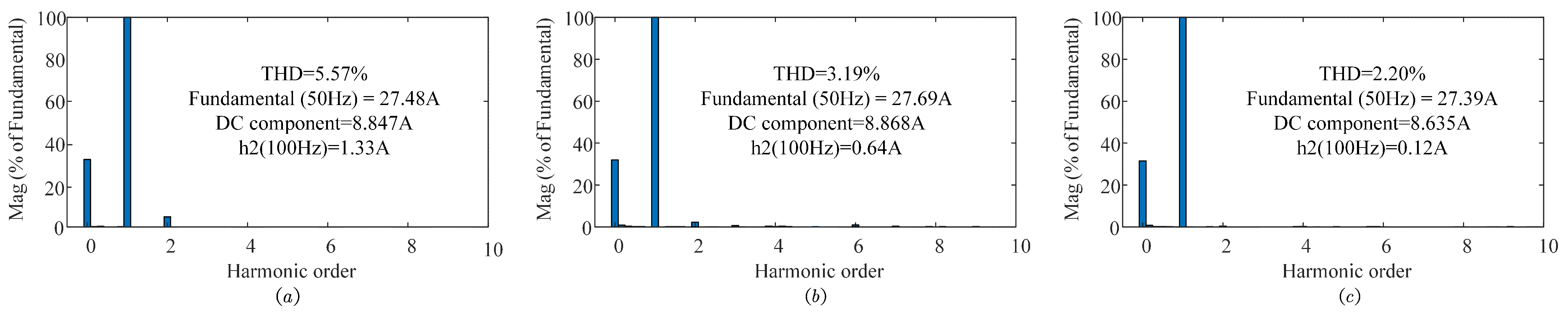
4.1. Steady-State Control Performance
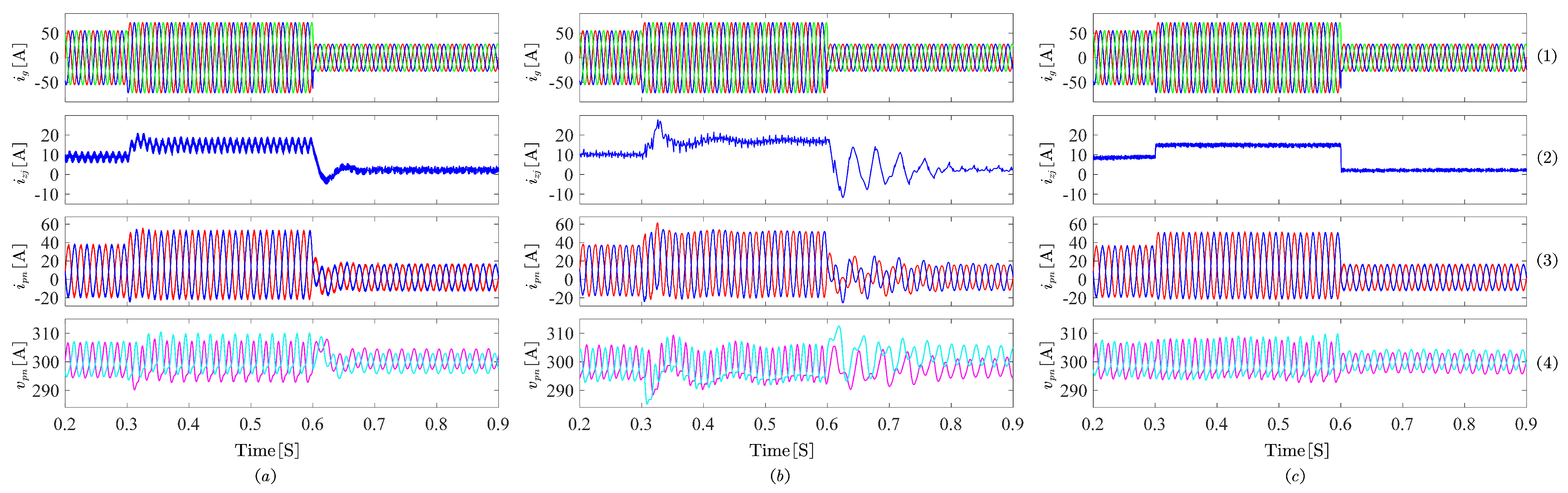
4.2. Dynamic-State Control Performance
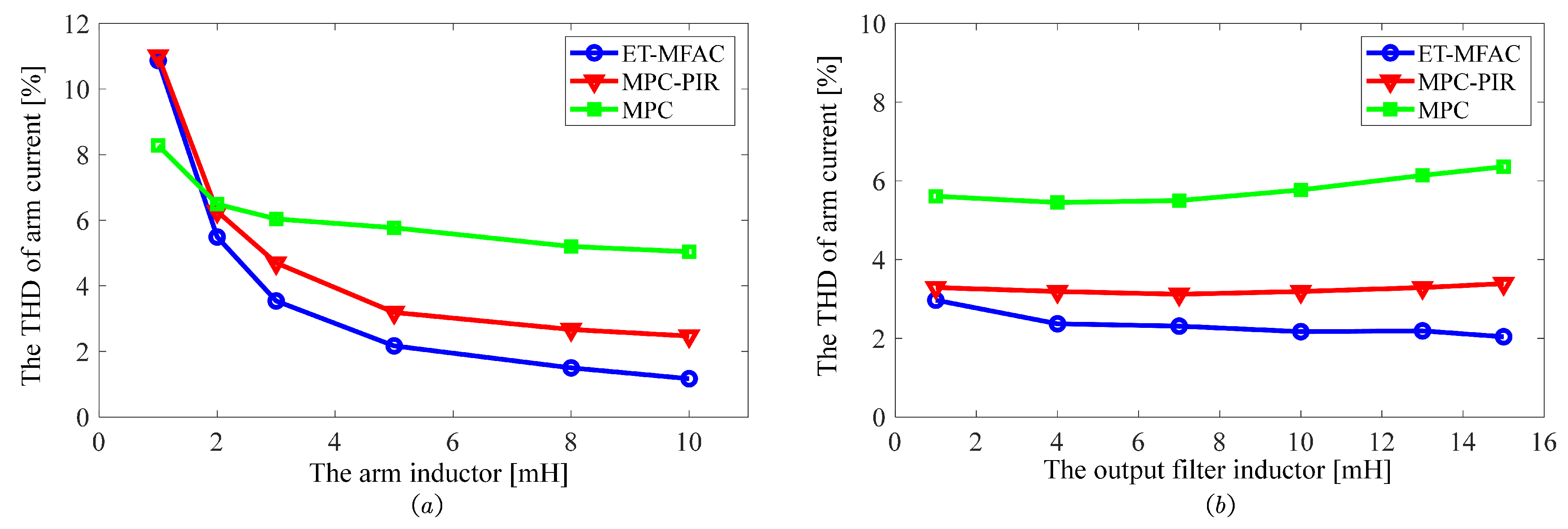
4.3. Steady-State Performance with the Effect of Parameter Mismatching
4.4. The Impact of the ET Mechanism on the Computational Burden
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nami, A.; Liang, J.; Dijkhuizen, F.; Demetriades, G.D. Modular Multilevel Converters for HVDC Applications: Review on Converter Cells and Functionalities. IEEE Trans. Power Electron. 2015, 30, 18–36. [Google Scholar] [CrossRef]
- Martinez-Rodrigo, F.; Ramirez, D.; Rey-Boue, A.B.; De Pablo, S.; Herrero-de Lucas, L.C. Modular multilevel converters: Control and applications. Energies 2017, 10, 1709. [Google Scholar] [CrossRef]
- Harbi, I.; Rodriguez, J.; Liegmann, E.; Makhamreh, H.; Heldwein, M.L.; Novak, M.; Rossi, M.; Abdelrahem, M.; Trabelsi, M.; Ahmed, M.; et al. Model-Predictive Control of Multilevel Inverters: Challenges, Recent Advances, and Trends. IEEE Trans. Power Electron. 2023, 38, 10845–10868. [Google Scholar] [CrossRef]
- Moon, J.W.; Park, J.W.; Kang, D.W.; Kim, J.M. A Control Method of HVDC-Modular Multilevel Converter Based on Arm Current Under the Unbalanced Voltage Condition. IEEE Trans. Power Deliv. 2015, 30, 529–536. [Google Scholar] [CrossRef]
- Li, M.; Chang, X.; Dong, N.; Liu, S.; Yang, H.; Zhao, R. Arm-Current-Based Model Predictive Control for Modular Multilevel Converter Under Unbalanced Grid Conditions. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 3195–3206. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, W.; Shu, H.; Zhang, J. Model Predictive PI Circulating Current Control for Modular Multilevel Converter. Electronics 2023, 12, 2690. [Google Scholar] [CrossRef]
- Ramirez, D.; Zarei, M.E.; Gupta, M.; Serrano, J. Fast Model-based Predictive Control (FMPC) for Grid Connected Modular Multilevel Converters (MMC). Int. J. Electr. Power Energy Syst. 2020, 119, 105951. [Google Scholar] [CrossRef]
- Perez, M.A.; Ceballos, S.; Konstantinou, G.; Pou, J.; Aguilera, R.P. Modular Multilevel Converters: Recent Achievements and Challenges. IEEE Open J. Ind. Electron. Soc. 2021, 2, 224–239. [Google Scholar] [CrossRef]
- Yue, B.; Cheng, Q.; Cheng, Y. Robustness Improvement Model Predictive Control Strategy Based on Luenberger Observer for Y-type Modular Multilevel Converter. Int. J. Circuit Theory Appl. 2023, 51, 5672–5690. [Google Scholar] [CrossRef]
- Wang, J.; Tang, Y.; Lin, P.; Liu, X.; Pou, J. Deadbeat Predictive Current Control for Modular Multilevel Converters With Enhanced Steady-State Performance and Stability. IEEE Trans. Power Electron. 2020, 35, 6878–6894. [Google Scholar] [CrossRef]
- Liu, P.; Wang, Y.; Cong, W.; Lei, W. Grouping-Sorting-Optimized Model Predictive Control for Modular Multilevel Converter With Reduced Computational Load. IEEE Trans. Power Electron. 2016, 31, 1896–1907. [Google Scholar] [CrossRef]
- Gong, Z.; Dai, P.; Yuan, X.; Wu, X.; Guo, G. Design and Experimental Evaluation of Fast Model Predictive Control for Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2016, 63, 3845–3856. [Google Scholar] [CrossRef]
- Guo, P.; He, Z.; Yue, Y.; Xu, Q.; Huang, X.; Chen, Y.; Luo, A. A Novel Two-Stage Model Predictive Control for Modular Multilevel Converter With Reduced Computation. IEEE Trans. Ind. Electron. 2019, 66, 2410–2422. [Google Scholar] [CrossRef]
- Wang, B.; Huang, J.; Wen, C.; Rodriguez, J.; Garcia, C.; Gooi, H.B. Event-Triggered Model Predictive Control for Power Converters. IEEE Trans. Ind. Electron. 2021, 68, 715–720. [Google Scholar] [CrossRef]
- Kwak, S.; Moon, U.C.; Park, J.C. Predictive-Control-Based Direct Power Control With an Adaptive Parameter Identification Technique for Improved AFE Performance. IEEE Trans. Power Electron. 2014, 29, 6178–6187. [Google Scholar] [CrossRef]
- Liu, X.; Wang, D.; Peng, Z. Improved Finite-Control-Set Model Predictive Control for Active Front-End Rectifiers with Simplified Computational Approach and on-Line Parameter Identification. ISA Trans. 2017, 69, 51–64. [Google Scholar] [CrossRef]
- El Myasse, I.; Mansouri, A.; El Magri, A.; Watil, A.; Kissaoui, M.; Lajouad, R.; Ashfaq, S.; Elaadouli, N. Robust Nonlinear Control Design of MMC-HVDC Systems for Wind Power Plants Integration. In Proceedings of the 2023 3rd International Conference on Innovative Research in Applied Science, Engineering and Technology (IRASET), Mohammedia, Morocco, 18–19 May 2023; pp. 1–5. [Google Scholar]
- Mehreganfar, M.; Saeedinia, M.H.; Davari, S.A.; Garcia, C.; Rodriguez, J. Sensorless Predictive Control of AFE Rectifier With Robust Adaptive Inductance Estimation. IEEE Trans. Ind. Inform. 2019, 15, 3420–3431. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Wang, Q. Robust Predictive Current Control with Parallel Compensation Terms Against Multi-Parameter Mismatches for PMSMs. IEEE Trans. Energy Convers. 2020, 35, 2222–2230. [Google Scholar] [CrossRef]
- Yu, K.; Wang, Z. Online Decoupled Multi-Parameter Identification of Dual Three-Phase IPMSM Under Position-Offset and HF Signal Injection. IEEE Trans. Ind. Electron. 2024, 71, 3429–3440. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Huang, L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Liu, J.; Rodriguez, J.; Garcia, C. Model-Free Predictive Current Control of Power Converters Based on Ultra-Local Model. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 1089–1093. [Google Scholar]
- Pal, P.; Behera, R.K.; Muduli, U.R. Eliminating Current Sensor Dependencies in DAB Converters Using a Luenberger Observer-Based Hybrid Approach. IEEE Trans. Ind. Appl. 2024, 60, 6380–6392. [Google Scholar] [CrossRef]
- Al-Wedami, A.; Al-Hosani, K.; Beig, A.R. Sliding Mode Observer of Submodular Capacitor Voltages in Modular Multilevel Converter. In Proceedings of the 2015 International Workshop on Recent Advances in Sliding Modes (RASM), Istanbul, Turkey, 9–11 April 2015; pp. 1–6. [Google Scholar]
- Chakraborty, R.; Samantaray, J.; Dey, A.; Chakrabarty, S. Capacitor Voltage Estimation of MMC Using a Discrete-Time Sliding Mode Observer Based on Discrete Model Approach. IEEE Trans. Ind. Appl. 2022, 58, 494–504. [Google Scholar] [CrossRef]
- Maysse, I.E.; Magri, A.E.; Watil, A.; Alkuhayli, A.; Kissaoui, M.; Lajouad, R.; Giri, F.; Mahmoud, M.M. Nonlinear Observer-Based Controller Design for VSC-Based HVDC Transmission Systems Under Uncertainties. IEEE Access 2023, 11, 124014–124030. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Wu, W.; Ma, J.; Wang, D.; Peng, Z.; Fang, Y. Finite-time ESO-based cascade-free FCS-MPC for NNPC converter. Int. J. Electr. Power Energy Syst. 2023, 148, 108939. [Google Scholar] [CrossRef]
- Babayomi, O.; Zhang, Z. Model-Free Predictive Control of Power Converters with Multifrequency Extended State Observers. IEEE Trans. Ind. Electron. 2023, 70, 11379–11389. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Wu, W.; Ma, J.; Fang, Y.; Peng, Z.; Wang, D. Predictor-Based Neural Network Finite-Set Predictive Control for Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2021, 68, 11621–11627. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Rodriguez, J.; Wu, W.; Ma, J.; Peng, Z.; Wang, D.; Fang, Y. Neural Predictor-Based Dynamic Surface Predictive Control for Power Converters. IEEE Trans. Ind. Electron. 2023, 70, 1057–1065. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Fang, Y.; Wang, K.; Li, Y.; Rodríguez, J. Predictive Control of Voltage Source Inverter: An Online Reinforcement Learning Solution. IEEE Trans. Ind. Electron. 2024, 71, 6591–6600. [Google Scholar] [CrossRef]
- Xi, Q.; Tian, Y.; Fan, Y. Capacitor Voltage Balancing Control of MMC Sub-Module Based on Neural Network Prediction. Electronics 2024, 13, 795. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Fang, Y.; Wang, K.; Li, Y.; Rodriguez, J. A Fuzzy Approximation for FCS-MPC in Power Converters. IEEE Trans. Power Electron. 2022, 37, 9153–9163. [Google Scholar] [CrossRef]
- Wu, W.; Qiu, L.; Liu, X.; Guo, F.; Rodriguez, J.; Ma, J.; Fang, Y. Data-Driven Iterative Learning Predictive Control for Power Converters. IEEE Trans. Power Electron. 2022, 37, 14028–14033. [Google Scholar] [CrossRef]
- Wu, W.; Qiu, L.; Rodriguez, J.; Liu, X.; Ma, J.; Fang, Y. Data-Driven Finite Control-Set Model Predictive Control for Modular Multilevel Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 523–531. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A Novel Data-Driven Control Approach for a Class of Discrete-Time Nonlinear Systems. IEEE Trans. Control. Syst. Technol. 2011, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Zhu, Y. Controller-Dynamic-Linearization-Based Model Free Adaptive Control for Discrete-Time Nonlinear Systems. IEEE Trans. Ind. Inform. 2013, 9, 2301–2309. [Google Scholar] [CrossRef]
- Lin, N.; Chi, R.; Huang, B. Event-Triggered Model-Free Adaptive Control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3358–3369. [Google Scholar] [CrossRef]
- Fang, Y.; Xu, N.; Liu, Y. Hybrid Linear Predictive Control Scheme Based on PIR and MPC for MMC. In Proceedings of the 2023 IEEE 2nd International Power Electronics and Application Symposium (PEAS), Guangzhou, China, 10–13 November 2023; pp. 491–495. [Google Scholar]
- Tu, Q.; Xu, Z.; Xu, L. Reduced Switching-Frequency Modulation and Circulating Current Suppression for Modular Multilevel Converters. IEEE Trans. Power Deliv. 2011, 26, 2009–2017. [Google Scholar]
- Tu, Q.; Xu, Z.; Huang, H.; Zhang, J. Parameter Design Principle of the Arm Inductor in Modular Multilevel Converter Based HVDC|IEEE Conference Publication|IEEE Xplore. Available online: https://ieeexplore.ieee.org/abstract/document/5666416 (accessed on 13 December 2010).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| DC-link voltage | 1200 V |
| Arm Inductance | 5 mH |
| Load resistance | 7 |
| Load inductance | 10 mH |
| Sub-module capacitance | 6000 uF |
| Number of sub-modules per arm N | 4 |
| Sub-module capacitor voltage | 300 V |
| AC-side output frequency f | 50 Hz |
| Method | Control Program Cycle Time |
|---|---|
| FCS-MPC method | s |
| Hybrid PIR-MPC method | s |
| Proposed ET-MFAC method | s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Liu, Y.; Fu, A.; Shi, S.; Zhang, Z. A Data-Driven Control for Modular Multilevel Converters Based on Model-Free Adaptive Control with an Event-Triggered Scheme. Electronics 2024, 13, 2899. https://doi.org/10.3390/electronics13152899
Fang Y, Liu Y, Fu A, Shi S, Zhang Z. A Data-Driven Control for Modular Multilevel Converters Based on Model-Free Adaptive Control with an Event-Triggered Scheme. Electronics. 2024; 13(15):2899. https://doi.org/10.3390/electronics13152899
Chicago/Turabian StyleFang, Ying, Yanhua Liu, Aolong Fu, Shuo Shi, and Zhenbin Zhang. 2024. "A Data-Driven Control for Modular Multilevel Converters Based on Model-Free Adaptive Control with an Event-Triggered Scheme" Electronics 13, no. 15: 2899. https://doi.org/10.3390/electronics13152899