
Model Assisted Extended State Observer-Based Deadbeat Predictive Current Control for Modular Multilevel Converter

Abstract
1. Introduction
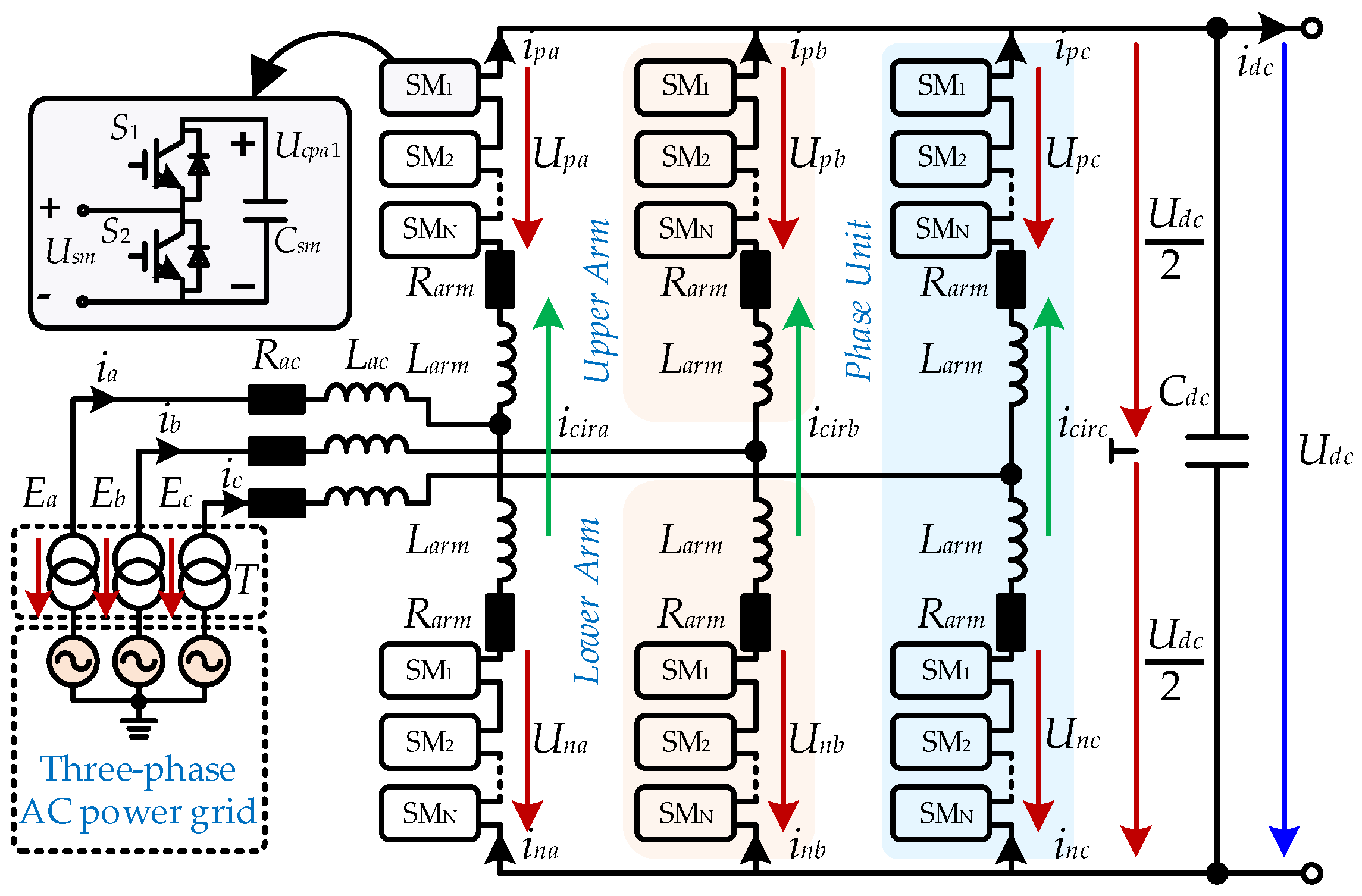
2. Topology Structure and Mathematical Model of MMC
2.1. Topology Structure
2.2. Mathematical Model
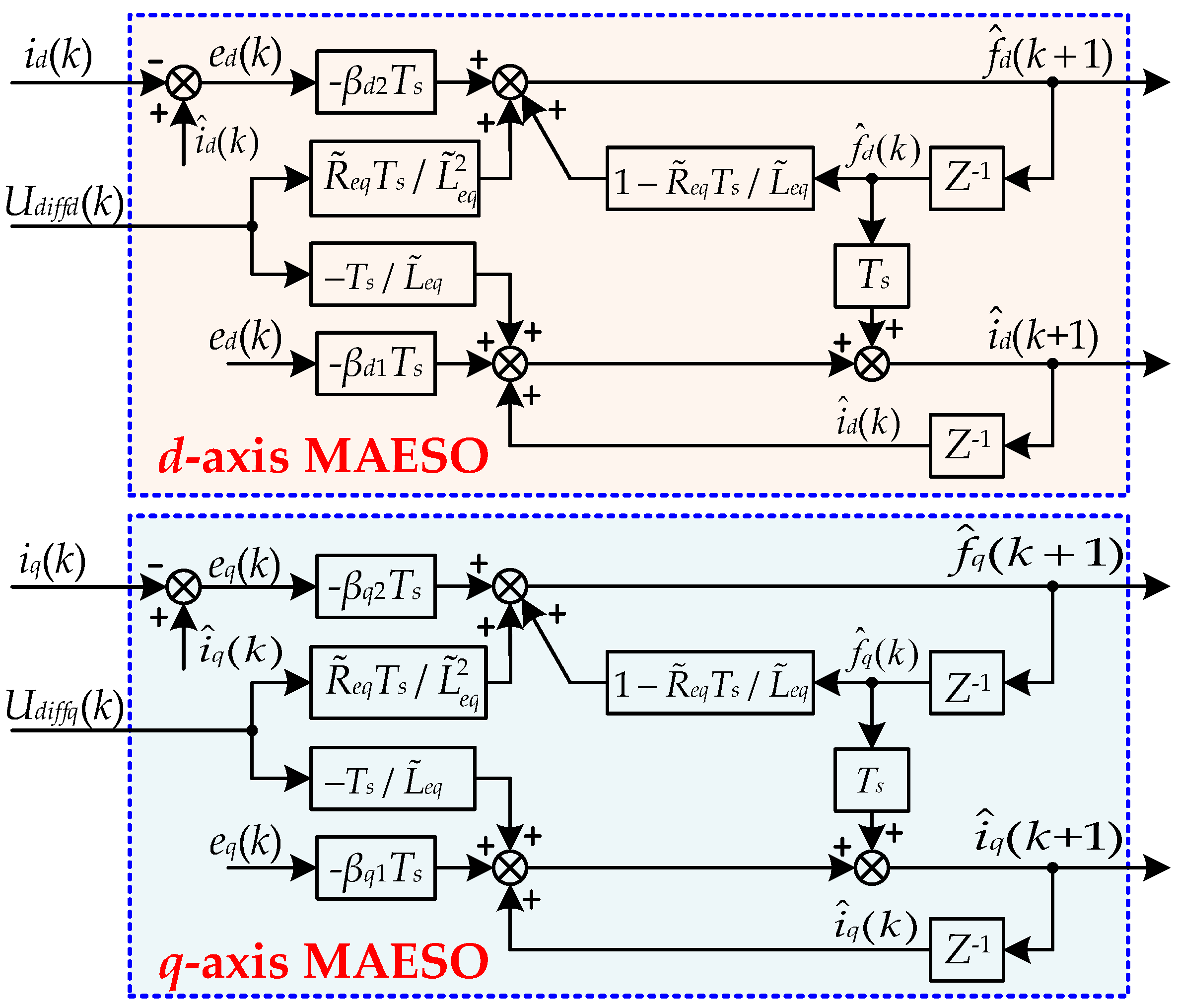
3. Proposed MAESO-Based DPCC Strategy
3.1. Principle of MAESO
3.2. AC-Side Current Control
3.3. Circulating Current Control
3.4. Modulation Strategy and Submodule Capacitance Balance Control
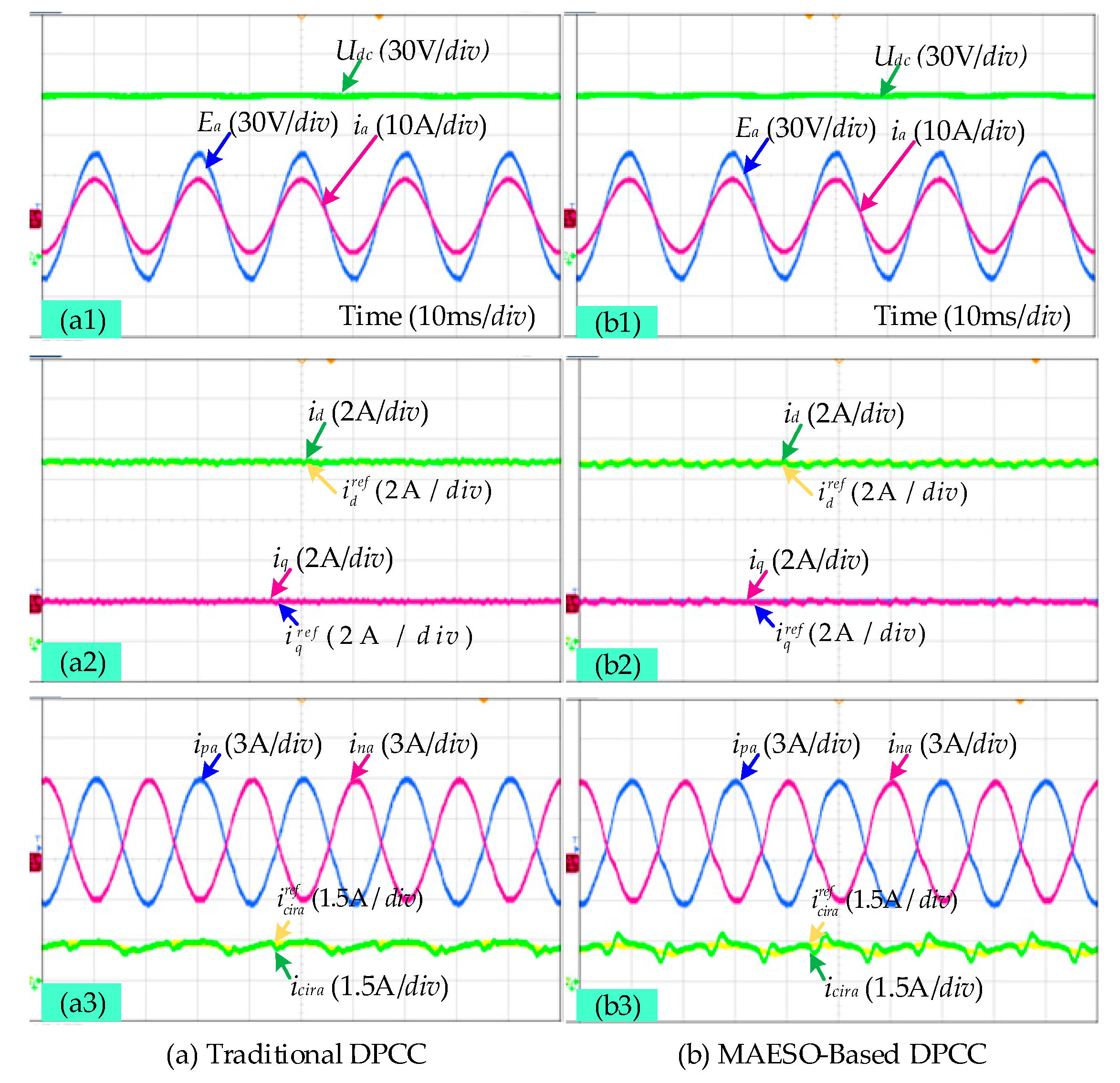
4. Experimental Results
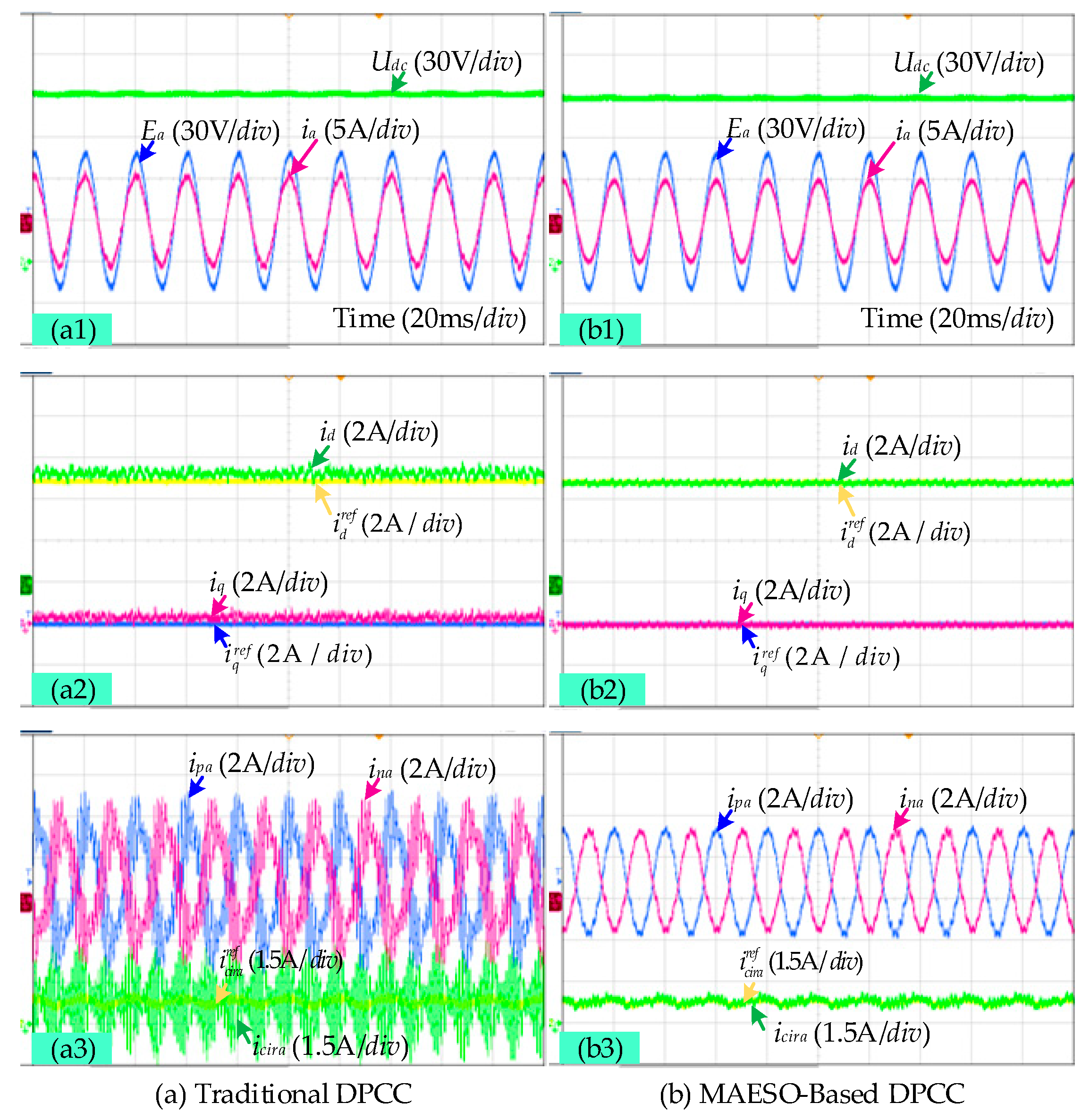
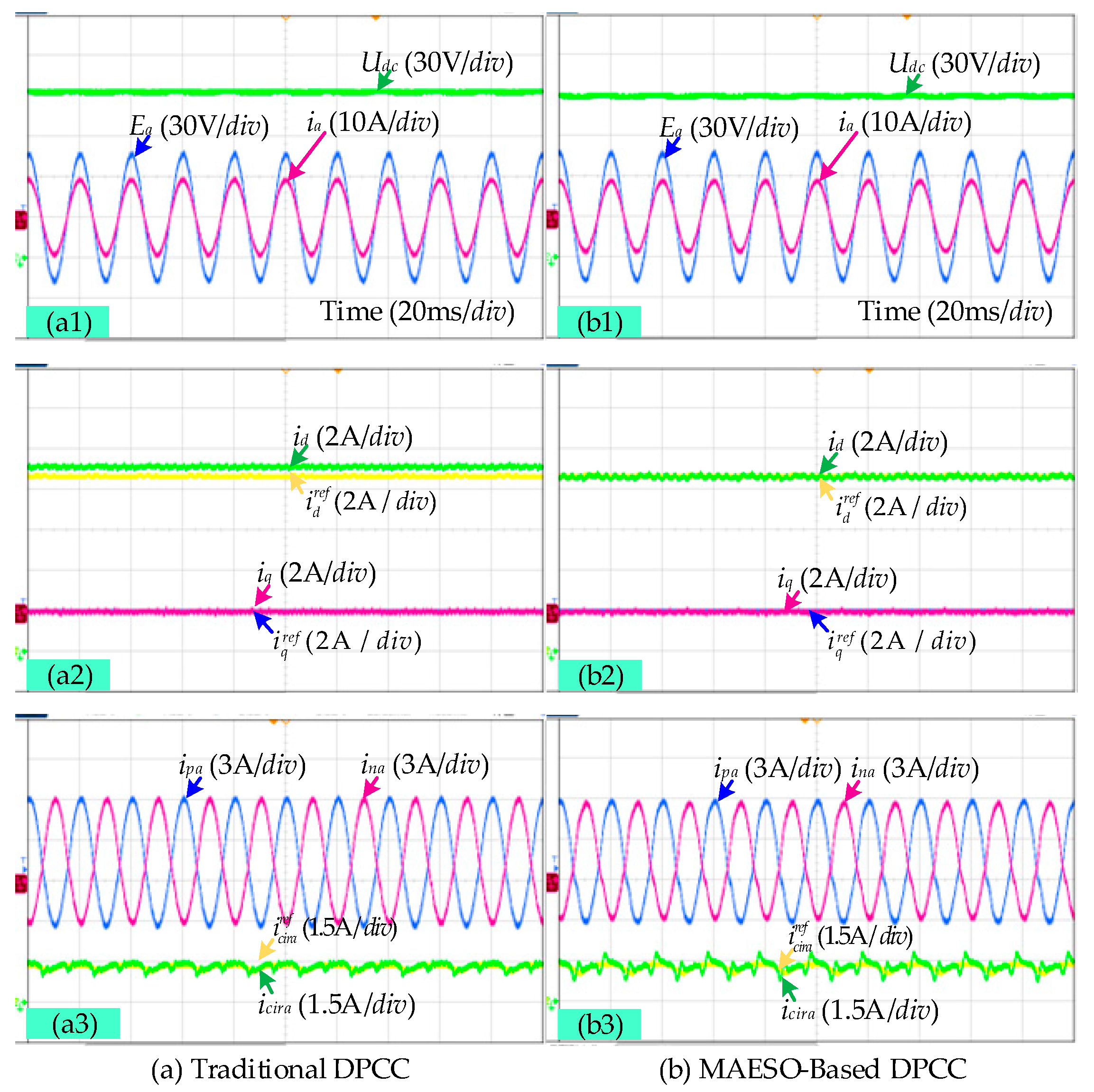
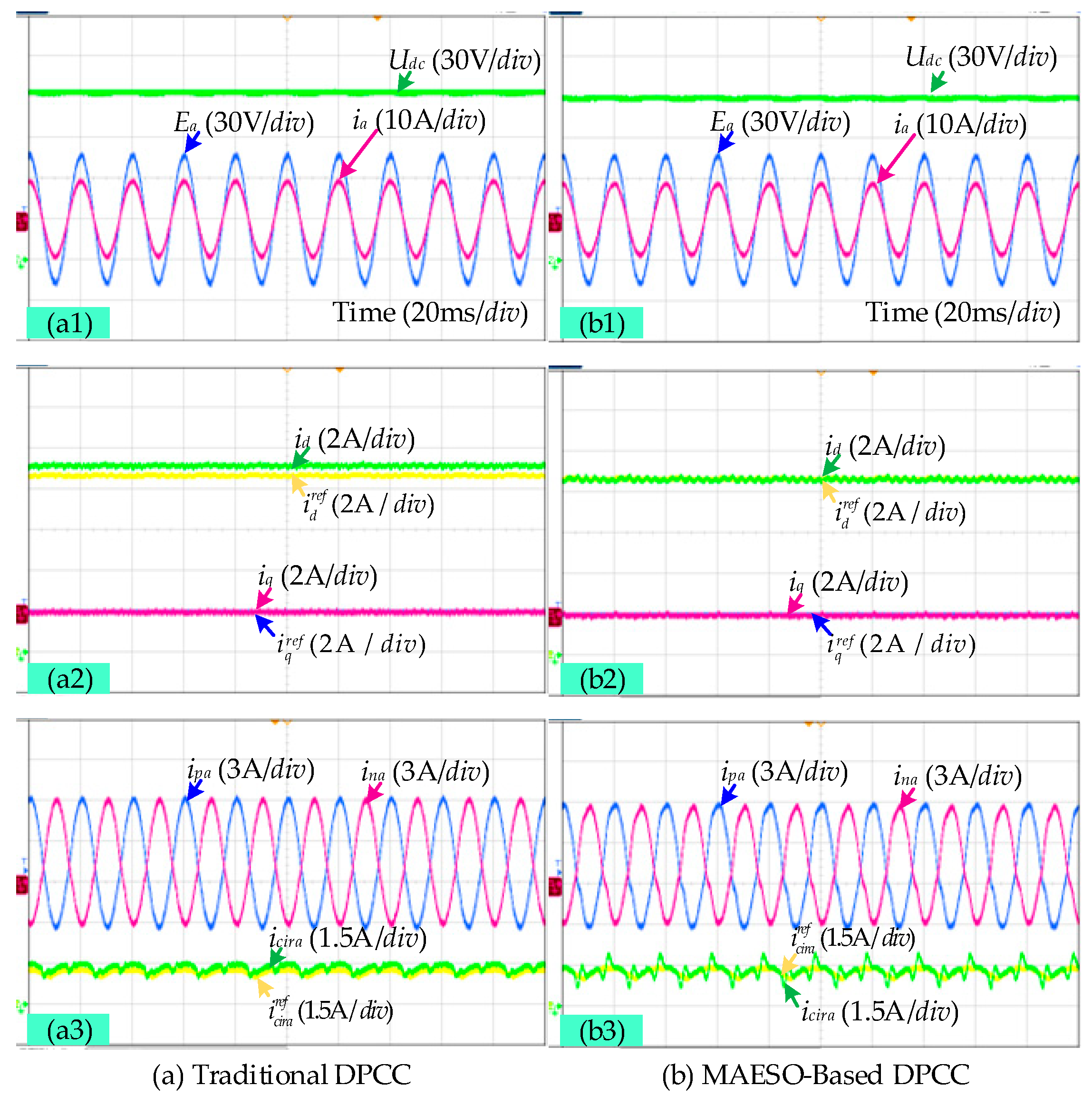
4.1. Steady-State Performance Comparison
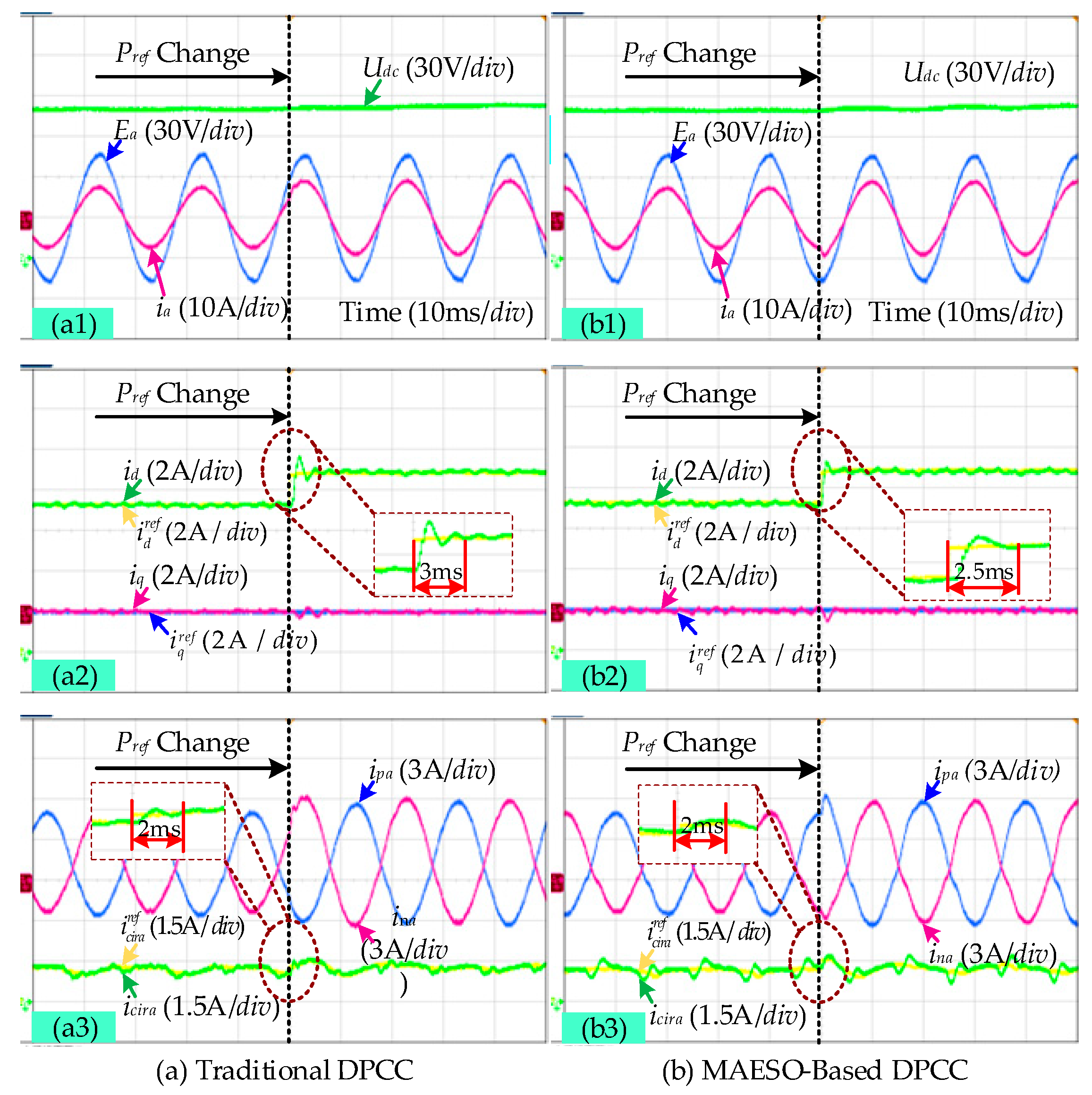
4.2. Dynamic Performance Comparison
4.3. Robust Performance Comparison under Parameter Changes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, X.; Tian, W.; Yang, Q.; Chai, N.; Jose, R.; Ralph, K.; Marcelo, L. Model predictive control of a modular multilevel converter considering control input constraints. IEEE Trans. Power Electron. 2024, 39, 636–648. [Google Scholar] [CrossRef]
- Wan, Y.; Yan, L.; Jiang, J. Modular multilevel converter-based power system for more electric aircraft. Power Electron. 2020, 54, 83–88. (In Chinese) [Google Scholar]
- Chen, X.; Li, Z.; Zhao, S.; Wei, X.; Kang, L. Design and implementation of a modular multilevel converter with hierarchical redundancy ability for electric ship MVDC system. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 189–202. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, Y.; Lin, H.; Wei, Y.; Liu, W.; Guo, Q.; Li, R.; Mantooth, H.A. Analysis and control of cascaded energy storage system for energy efficiency and power quality improvement in electrified railways. IEEE Trans. Transp. Electrif. 2024, 10, 1299–1313. [Google Scholar] [CrossRef]
- Chen, J.; Hu, H.; Wang, M.; Ge, Y.; Wang, K.; Huang, Y.; Yang, K.; He, Z.; Xu, Z. Power flow control-based regenerative braking energy utilization in AC electrified railways: Review and future trends. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6354–6365. [Google Scholar] [CrossRef]
- Hu, H.; Liu, Y.; Yang, X.; Li, Y.; Li, Z.; Zhu, X. A decentralized coordinated control strategy for multiple traction substations in MVDC railway power supply system. IEEE Trans. Transp. Electrif. 2024, 10, 3246–3257. [Google Scholar] [CrossRef]
- Chen, J.; Yang, K.; Lin, H.; Wang, K.; Cai, C.; Zhang, P. Star-connection supercapacitor-embedded CHMC-based STATCOM for electrified railways. IEEE Trans. Power Electron. 2024, 39, 13733–13743. [Google Scholar] [CrossRef]
- Yuan, B.; Xu, J.; Zhao, C.; He, Z.; Pang, H.; Ma, W. Optimal design of PR circulating current suppressing controllers for modular multilevel converters. Proc. CSEE 2015, 35, 2567–2575. (In Chinese) [Google Scholar]
- Li, T.; Yao, L.; Zhang, S. Improved two-stage mode predictive control for modular multilevel converters. Electr. Power Autom. Equip. 2024, 44, 562–570. (In Chinese) [Google Scholar]
- Yang, X.; Yang, F.; Xue, H.; Jiang, Y.; Bao, W.; Zhang, J. Duty-cycle modulation based model predictive control of modular multilevel converter. Autom. Electr. Power Syst. 2021, 45, 134–142. (In Chinese) [Google Scholar]
- Yang, X.; Xu, Y.; Yang, F.; Wang, T.; Yang, S.; Xue, H. Hierarchical model predictive control method based on finite state for modular multilevel converter. Autom. Electr. Power Syst. 2020, 44, 148–155. (In Chinese) [Google Scholar]
- Lin, H.; Wand, Z. A backward prediction based model predictive control strategy for modular multilevel converters. Proc. CSEE 2017, 37, 5098–5106. (In Chinese) [Google Scholar]
- Wand, J.; Tang, Y.; Lin, P.; Liu, X.; Josep, P. Deadbeat predictive current control for modular multilevel converters with enhanced steady-state performance and stability. IEEE Trans. Power Electron. 2020, 35, 6878–6894. [Google Scholar]
- Rong, F.; Gong, X.; Huang, S.; Luo, D. The deadbeat control strategy of modular multilevel converter. Proc. CSEE 2017, 37, 1753–1764. (In Chinese) [Google Scholar]
- Guo, G.; Dai, P.; Gong, Z. Submodule unified pulse width modulated based optimized model predictive control for modular multilevel converters. Proc. CSEE 2017, 37, 1478–1488. (In Chinese) [Google Scholar]
- Gong, Z.; Wu, X.; Dai, P.; Zhu, R. Modulated model predictive control for MMC-based active front-end rectifiers under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2019, 66, 2398–2409. [Google Scholar] [CrossRef]
- Lin, H.; Chung, H.; Shen, R.; Xiang, Y. Enhancing stability of DC cascaded systems with CPLs using MPC combined with NI and accounting for parameter uncertainties. IEEE Trans. Power Electron. 2024, 39, 5225–5238. [Google Scholar] [CrossRef]
- Xie, D.; Lin, C.; Deng, Q.; Lin, H.; Cai, S.; Thomas, B.; Ge, X. Simple vector calculation and constraint-based fault-tolerant control for a single-phase CHBMC. IEEE Trans. Power Electron. 2024. [Google Scholar] [CrossRef]
- Cai, X.; Zhao, C.; Pang, H.; Lin, C. A novel DC voltage control of MMC-HVDC power transmission system based on discrete mathematical model of MMC. Power Syst. Technol. 2013, 37, 2403–2409. (In Chinese) [Google Scholar]
- Lin, H.; Niu, S.; Xue, Z.; Wang, S. A simplified virtual-vector-based model predictive control technique with a control factor for three-phase SPMSM drives. IEEE Trans. Power Electron. 2023, 38, 7546–7557. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique: The Technique for Estimating and Compensating the Uncertainties; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Hang, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar]
- Gao, Z. Scaling and bandwidth parameterization based on control tuning. In Proceedings of the 2004 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Zhu, B. Introduction to Active Disturbance Rejection Control; Beihang University Press: Beijing, China, 2017. [Google Scholar]
- Zhang, Y.; Li, B.; Liu, J.; Liu, X.; Li, B. Model-free predictive current control of PWM rectifier Under unbalance and distorted network. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 5944–5951. [Google Scholar]
- Zhang, Y.; Jin, J.; Huang, L. Model-free predictive current control of PMSM drives based on extended state observer using ultralocal model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Yuan, X.; Zuo, Y.; Fan, Y.; Lee, C.H.T. Model-free predictive current control of SPMSM drives using extended state observer. IEEE Trans. Ind. Electron. 2022, 69, 6540–6550. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Line-to-line voltage at MMC side of isolated transformer T (RMS Value) | Erms | 60 V |
| AC-side inductor | Lac | 3 mH |
| AC-side resistor | Rac | 0.5 Ω |
| Arm inductor | Larm | 5 mH |
| Arm resistor | Rarm | 1.0 Ω |
| SM capacitor | Csm | 4.4 mF |
| DC-side capacitor | Cdc | 3 mF |
| Number of SMs per arm | N | 4 |
| Carrier frequency of PSC-PWM | fcir | 4 kHz |
| Control period | Ts | 125 μs |
| Bandwidth of ESO | ω0 | 1200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhang, Y.; Liu, Y.; Jiang, S. Model Assisted Extended State Observer-Based Deadbeat Predictive Current Control for Modular Multilevel Converter. Electronics 2024, 13, 3789. https://doi.org/10.3390/electronics13193789
Yang X, Zhang Y, Liu Y, Jiang S. Model Assisted Extended State Observer-Based Deadbeat Predictive Current Control for Modular Multilevel Converter. Electronics. 2024; 13(19):3789. https://doi.org/10.3390/electronics13193789
Chicago/Turabian StyleYang, Xiaowei, Yongqiang Zhang, Yang Liu, and Sheng Jiang. 2024. "Model Assisted Extended State Observer-Based Deadbeat Predictive Current Control for Modular Multilevel Converter" Electronics 13, no. 19: 3789. https://doi.org/10.3390/electronics13193789
APA StyleYang, X., Zhang, Y., Liu, Y., & Jiang, S. (2024). Model Assisted Extended State Observer-Based Deadbeat Predictive Current Control for Modular Multilevel Converter. Electronics, 13(19), 3789. https://doi.org/10.3390/electronics13193789