
LCC-HVDC Frequency Robust Control Strategy Based on System Parameter Identification in Islanded Operation Mode

 ,
,
Abstract
:1. Introduction
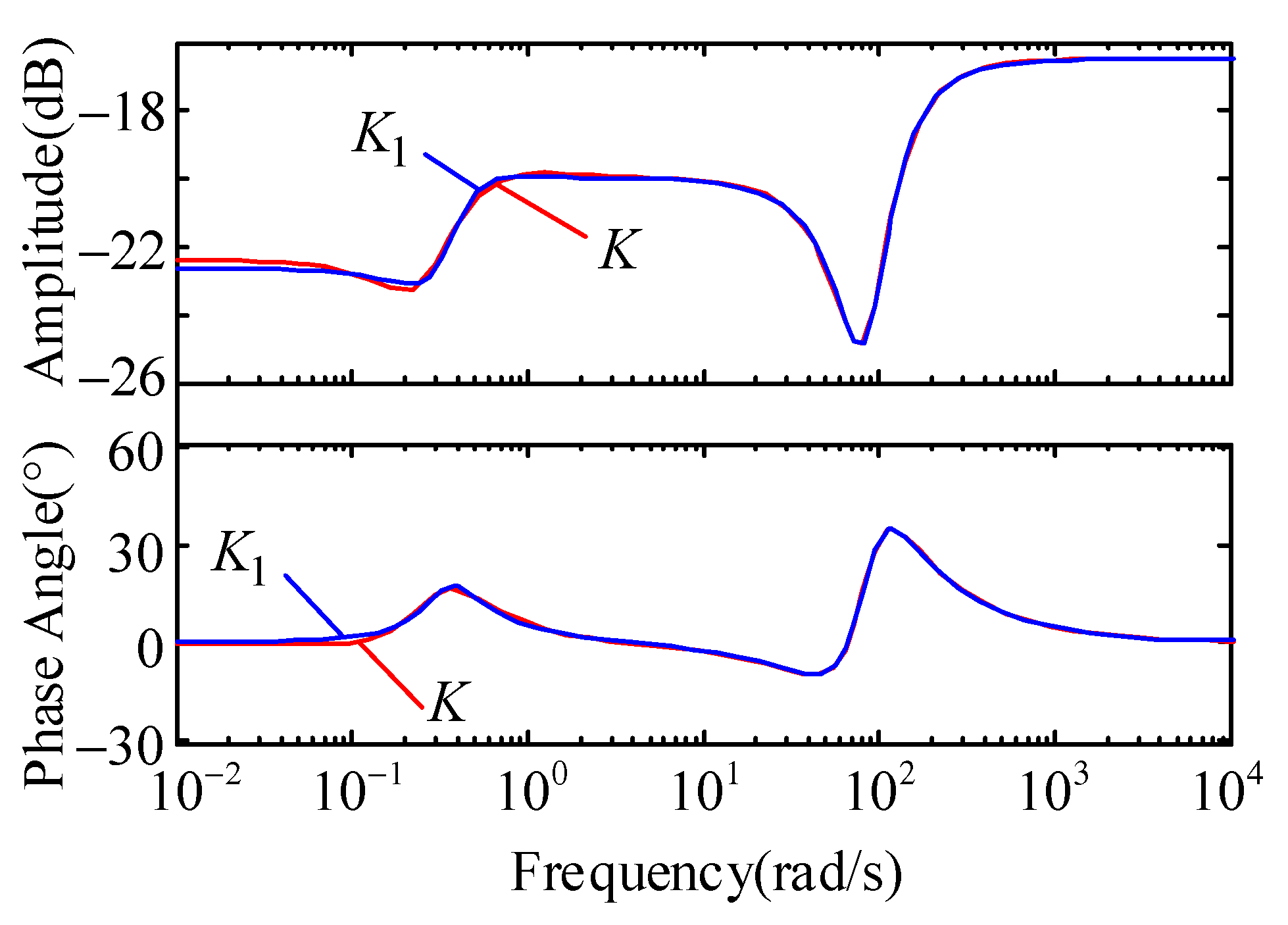
- The establishment of the low-order linearization model of the system in this paper is achieved through the SDM-Prony algorithm. Subsequently, robust control is proposed based on linear matrix inequality (LMI).
- Robustness issues and solutions for optimizing controller performance are proposed through the adoption of regional pole placement methods.
- The proposed supplementary frequency robust controller significantly reduces system frequency fluctuations, improves system frequency stability, and has superior control effects and higher robustness.
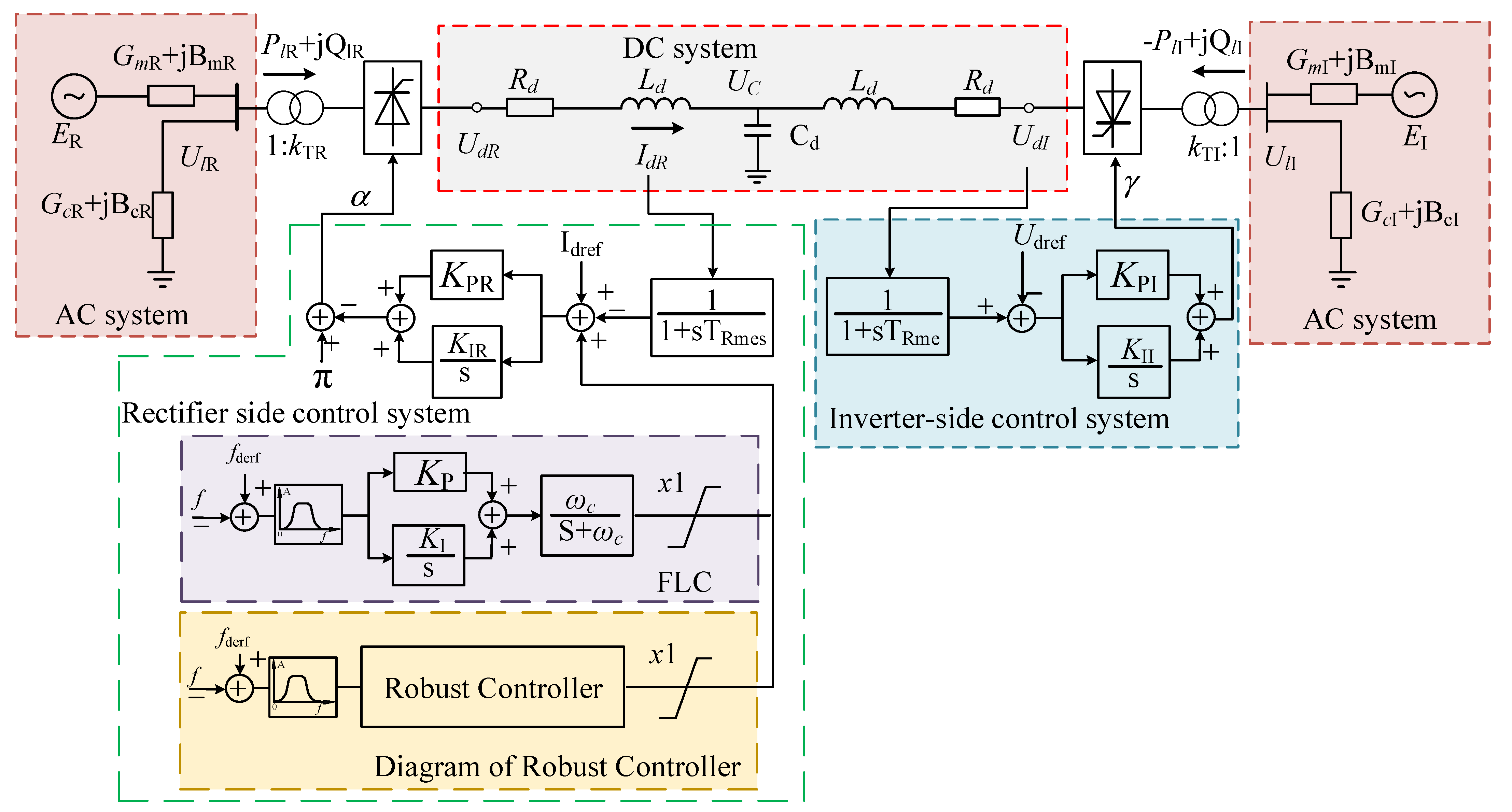
2. Control Framework of DC Transmission Systems with Additional Frequency Control
2.1. HVDC System with Frequency Control
2.2. Robust Control Theory
- (1)
- H∞ performance.
- (2)
- H2 performance.
- (3)
- Region-based pole location.
- (4)
- Multi-objective control.
3. Island Model Identification Based on the SDM-Prony Algorithm
3.1. The SDM-Prony Identification Algorithm
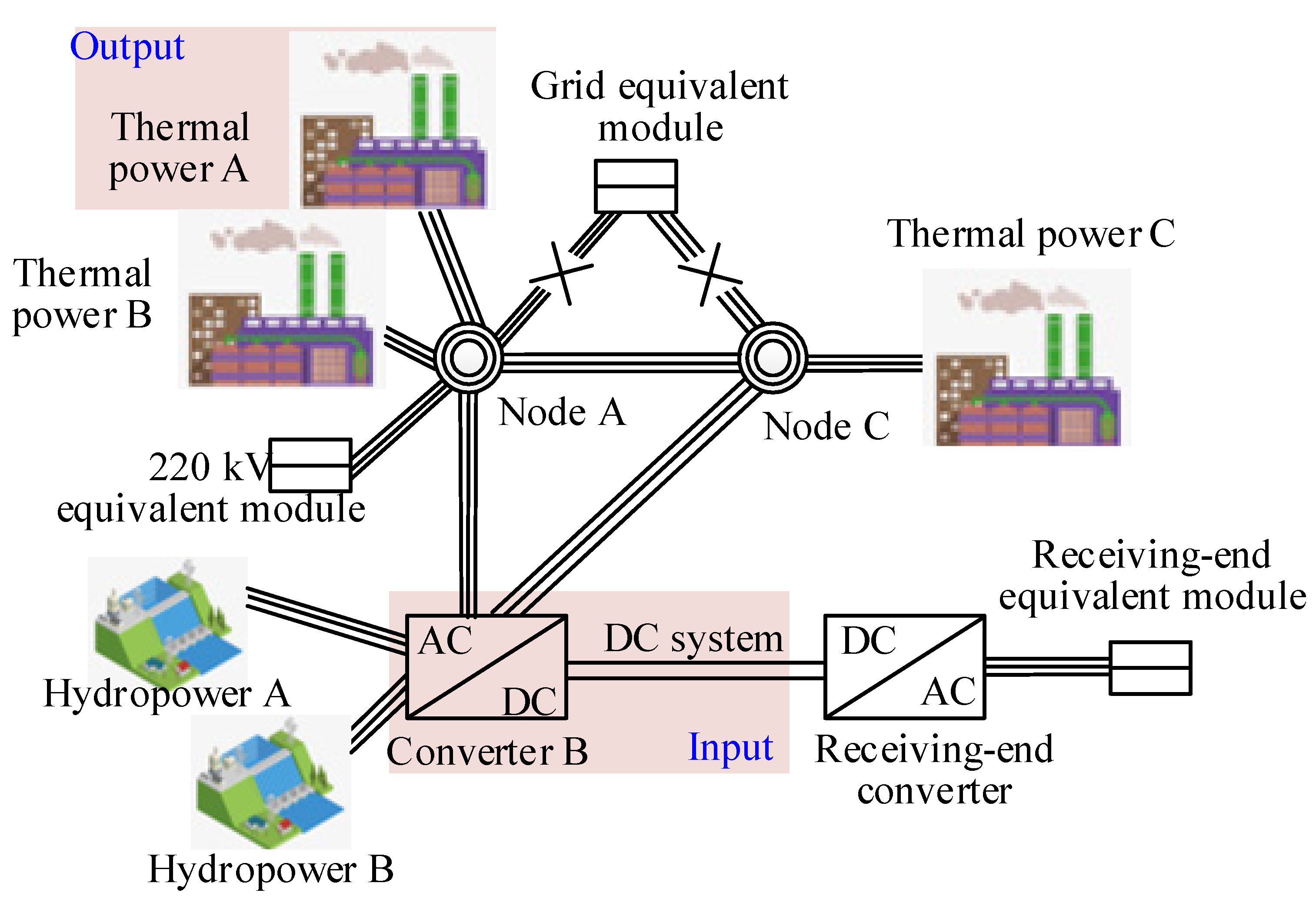
3.2. Identification of Island Simulation Models
4. The Design of Supplementary Frequency Robust Controllers
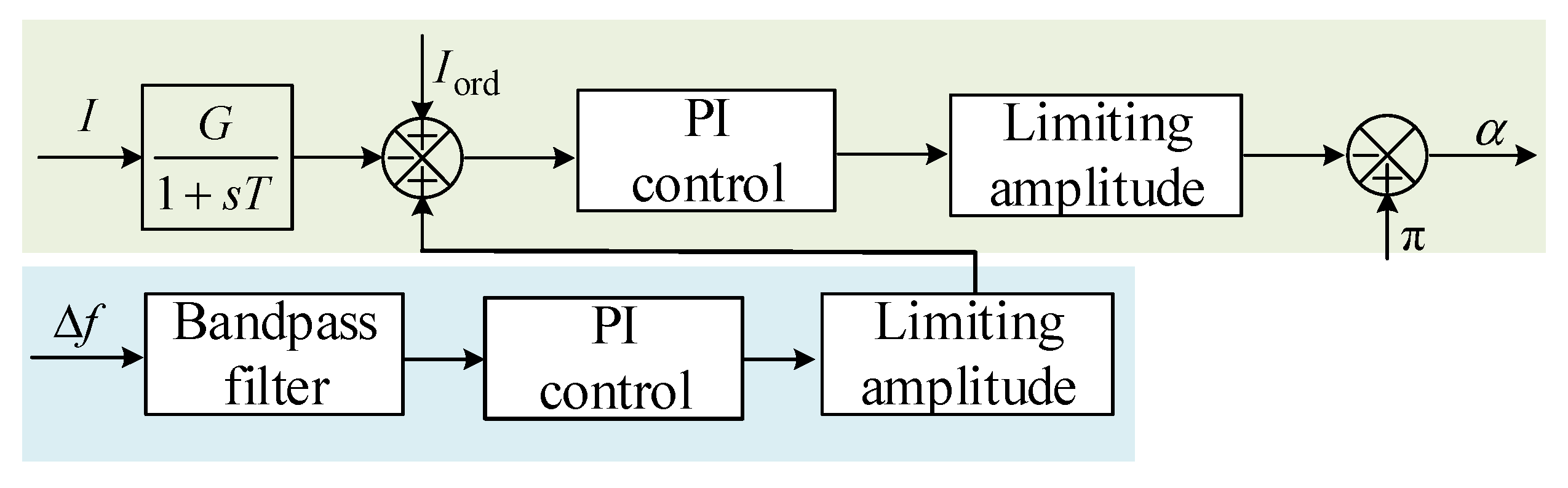
4.1. The Design of the Controller
4.2. The Design of the Supplementary Frequency Robust Controller
5. Simulation Verification
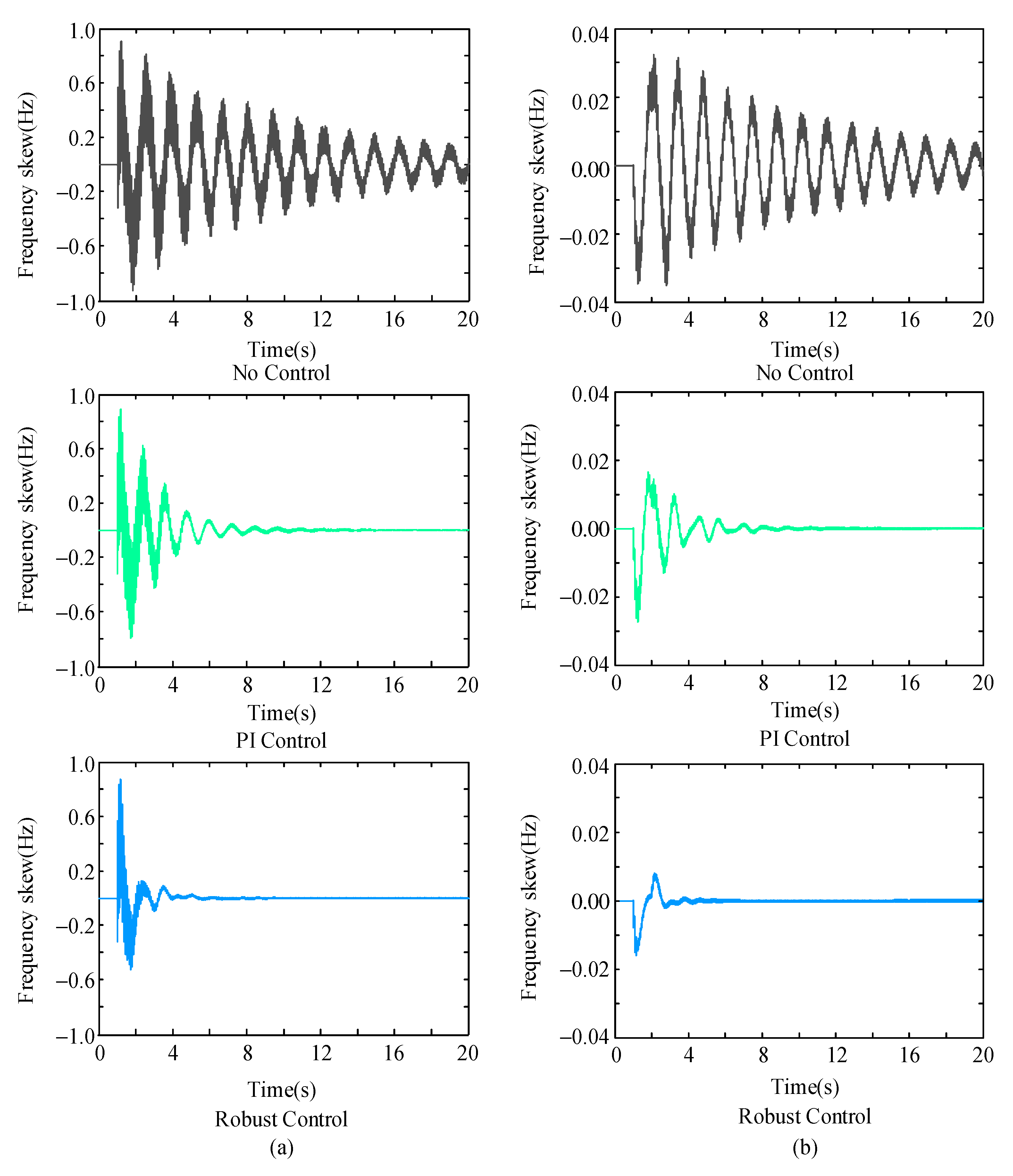
5.1. Control Performance Verification
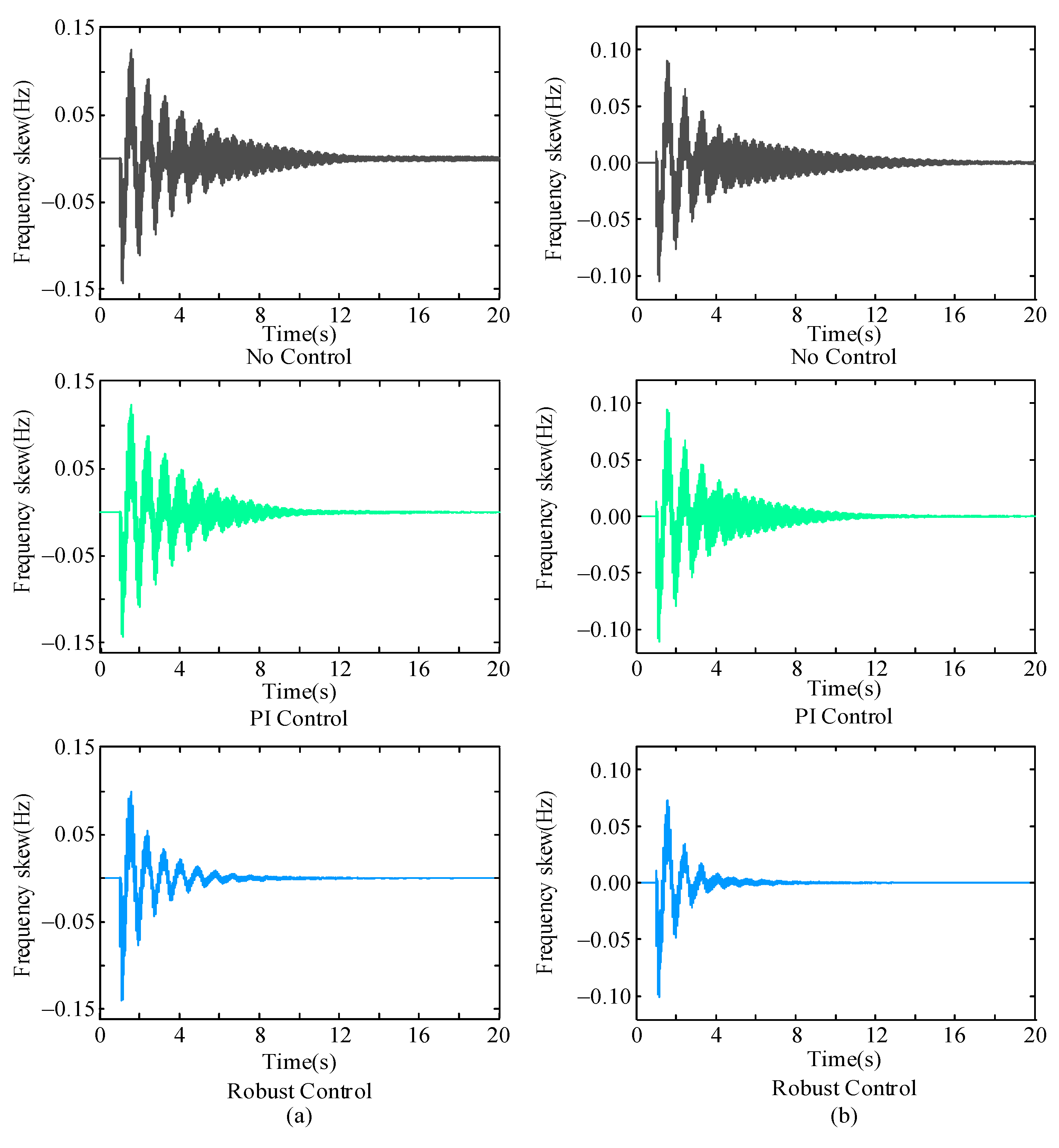
5.2. Robustness Validation
5.3. Validation of Control Efficacy during Resilient Network Operation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Hong, C.; Wang, T.; Xiong, Q.; Zeng, Y. Fault recovery control for islanding operation of yunnan-guangdong UHVDC transmission system after mono-polar blocking. In Proceedings of the 2016 IEEE International Conference on Power System Technology (POWERCON), Wollongong, NSW, Australia, 28 September–1 October 2016; pp. 1–5. [Google Scholar] [CrossRef]
- McConnell, B. Applications of high temperature superconductors to DC electric power transmission and distribution. IEEE Trans. Appl. Supercond. 2005, 15, 2142–2145. [Google Scholar] [CrossRef]
- Inwumoh, J.; Baguley, C.A.; Gunawardane, K. A Fast and Accurate Fault Location Technique for High Voltage DC (HVDC) Systems Une technique rapide et précise de localisation des défauts pour les systèmes de courant continu à haute tension (CCHT). IEEE Can. J. Electr. Comput. Eng. 2022, 45, 383–393. [Google Scholar] [CrossRef]
- Zhang, G.; Cheng, Y.; Lu, N.; Guo, Q. Research of Hydro-Turbine Governor Supplementary Control Strategy for Islanding AC Grid at Sending Terminal of HVDC System. IEEE Trans. Energy Convers. 2016, 31, 1229–1238. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 17. [Google Scholar]
- Yang, L.; Wang, Y. Study on frequency oscillation controlling strategies for islanded operation mode of HVDC transmission systems. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Rao, H.; Wu, W.; Mao, T.; Zhou, B.; Hong, C.; Liu, Y.; Wu, X. Frequency control at the power sending side for HVDC asynchronous interconnections between yunnan power grid and the rest of CSG. CSEE J. Power Energy Syst. 2021, 7, 105–113. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.; Gao, Q.; Zhang, Y.; Yang, R.; Yang, R.; Diao, H. Research on HVDC frequency limit control to improve frequency restoration in muti-HVDC asynchronous system. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Shi, H.; Chen, G.; Zhu, J.; Wang, Y.; Tai, K. FLC Dead band Optimization for HVDC System Stability Enhancement. In Proceedings of the 2020 IEEE Sustainable Power and Energy Conference (iSPEC), Chengdu, China, 23–25 November 2020; pp. 692–698. [Google Scholar] [CrossRef]
- Wang, L.; Thi, M.S.-N. Comparisons of Damping Controllers for Stability Enhancement of an Offshore Wind Farm Fed to an OMIB System Through an LCC-HVDC Link. IEEE Trans. Power Syst. 2013, 28, 1870–1878. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, K.; Wei, Y.; Zhu, H. Emergency power control strategy of HVDC FLC based on modified SFR model in islanded HVDC sending system. Int. J. Electr. Power Energy Syst. 2022, 142, 108314. [Google Scholar] [CrossRef]
- Behera, A.; Panigrahi, T.K.; Ray, P.K.; Sahoo, A.K. A novel cascaded PID controller for automatic generation control analysis with renewable sources. IEEE/CAA J. Autom. Sin. 2019, 6, 1438–1451. [Google Scholar] [CrossRef]
- El-Ela, A.A.A.; El-Sehiemy, R.A.; Shaheen, A.M.; Diab, A.E.-G. Design of cascaded controller based on coyote optimizer for load frequency control in multi-area power systems with renewable sources. Control Eng. Pract. 2022, 121, 105058. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; Aboras, K.M.; Abbasy, N.H. Design of Cascaded PI-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer. IEEE Access 2021, 9, 150715–150732. [Google Scholar] [CrossRef]
- Çelik, E. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft. Comput. 2021, 25, 1193–1217. [Google Scholar] [CrossRef]
- Li, C.; Deng, J.; Zhang, X.-P. Robust coordination damping control of multi-model system with FACTS devices via sequential approach. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Rehtanz, C.; Ruberg, S.; Luo, L.; Cao, Y. Wide-area robust coordination approach of HVDC and FACTS controllers for damping multiple interarea oscillations. IEEE Trans. Power Deliv. 2012, 27, 1096–1105. [Google Scholar] [CrossRef]
- Yang, F.; Gani, M.; Henrion, D. Fixed-Order Robust H∞ Controller Design With Regional Pole Assignment. IEEE Trans. Autom. Control 2007, 52, 1959–1963. [Google Scholar] [CrossRef]
- Scherer, C.; Gahinet, P.; Chilali, M. Multiobjective output-feedback control via LMI optimization. IEEE Trans. Autom. Control 1997, 42, 896–911. [Google Scholar] [CrossRef]
- Pal, B.C.; Coonick, A.H.; Jaimoukha, I.M.; El-Zobaidi, H. A linear matrix inequality approach to robust damping control design in power systems with superconducting magnetic energy storage device. IEEE Trans. Power Syst. 2000, 15, 356–362. [Google Scholar] [CrossRef]
- Tripathy, P.; Srivastava, S.C.; Singh, S.N. A modified TLS-ESPRIT based method for low-frequency mode identification in power systems utilizing synchrophasor measurements. IEEE Trans. Power Syst. 2011, 26, 719–727. [Google Scholar] [CrossRef]
- Shen, L.; Song, R.; Xi, G. Simulation Research on Inhibition of Power System Oscillation Based on TLS-ESPRIT Method. In Proceedings of the 2021 International Conference on Advanced Electrical Equipment and Reliable Operation (AEERO), Beijing, China, 15–17 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, Y.; Bose, A. Design of wide-area damping controllers for interarea oscillations. IEEE Trans. Power Syst. 2008, 23, 1136–1143. [Google Scholar] [CrossRef]
- Das, P.; Bhattacharjee, A.; Pathak, S. Performance analysis of TLS-Esprit and QR TLS- Esprit algorithm for Direction of Arrival estimation. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015; pp. 1395–1398. [Google Scholar] [CrossRef]
- Majumder, R.; Pal, B.C.; Chaudhuri, B.; Korba, P. Design and real time implementation of LMI based robust damping controllers for power systems. In Proceedings of the 2007 IEEE International Conference on System of Systems Engineering, San Antonio, TX, USA, 16–18 April 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Pathak, D.; Sambariya, D. Methodologies for the Selection of Weighting Function. In Proceedings of the 2019 2nd International Conference on Power Energy, Environment and Intelligent Control (PEEIC), Greater Noida, India, 18–19 October 2019; pp. 347–350. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Ma, J.; Wei, L.; Li, X.; Liu, X. Study of frequency and voltage characteristics of islanding HVDC system and the corresponding control strategy. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 2247–2251. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No Control | PI Control | Robust Control | |
|---|---|---|---|
| Disturbance 1 | >20 s | 10 s | 6 s |
| Disturbance 2 | >20 s | 10 s | 5 s |
| Disturbance 1 | 0.71 Hz | 0.81 Hz | 0.76 Hz |
| Disturbance 2 | 0.76 Hz | 0.81 Hz | 0.51 Hz |
| No Control | PI Control | Robust Control | |
|---|---|---|---|
| Disturbance 3 | >20 s | >20 s | 6 s |
| Disturbance 4 | >20 s | >20 s | 6 s |
| Disturbance 3 | 0.51 Hz | 0.61 Hz | 0.53 Hz |
| Disturbance 4 | 0.51 Hz | 0.51 Hz | 0.5 Hz |
| No Control | PI Control | Robust Control | |
|---|---|---|---|
| Disturbance 5 | 12 s | 10 s | 7 s |
| Disturbance 6 | 14 s | 12 s | 6 s |
| Disturbance 5 | 1.01 Hz | 0.98 Hz | 1.15 Hz |
| Disturbance 6 | 1.21 Hz | 1.25 Hz | 1.3 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, C.; Liu, M.; Peng, J.; Wang, Y.; Liao, J.; Zheng, Z.; Gao, S.; Guo, C. LCC-HVDC Frequency Robust Control Strategy Based on System Parameter Identification in Islanded Operation Mode. Electronics 2024, 13, 951. https://doi.org/10.3390/electronics13050951
Xing C, Liu M, Peng J, Wang Y, Liao J, Zheng Z, Gao S, Guo C. LCC-HVDC Frequency Robust Control Strategy Based on System Parameter Identification in Islanded Operation Mode. Electronics. 2024; 13(5):951. https://doi.org/10.3390/electronics13050951
Chicago/Turabian StyleXing, Chao, Mingqun Liu, Junzhen Peng, Yuhong Wang, Jianquan Liao, Zongsheng Zheng, Shilin Gao, and Chunsheng Guo. 2024. "LCC-HVDC Frequency Robust Control Strategy Based on System Parameter Identification in Islanded Operation Mode" Electronics 13, no. 5: 951. https://doi.org/10.3390/electronics13050951