
Sum-Rate Maximization Scheme for Multi-RIS-Assisted NOMA Uplink Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- ●
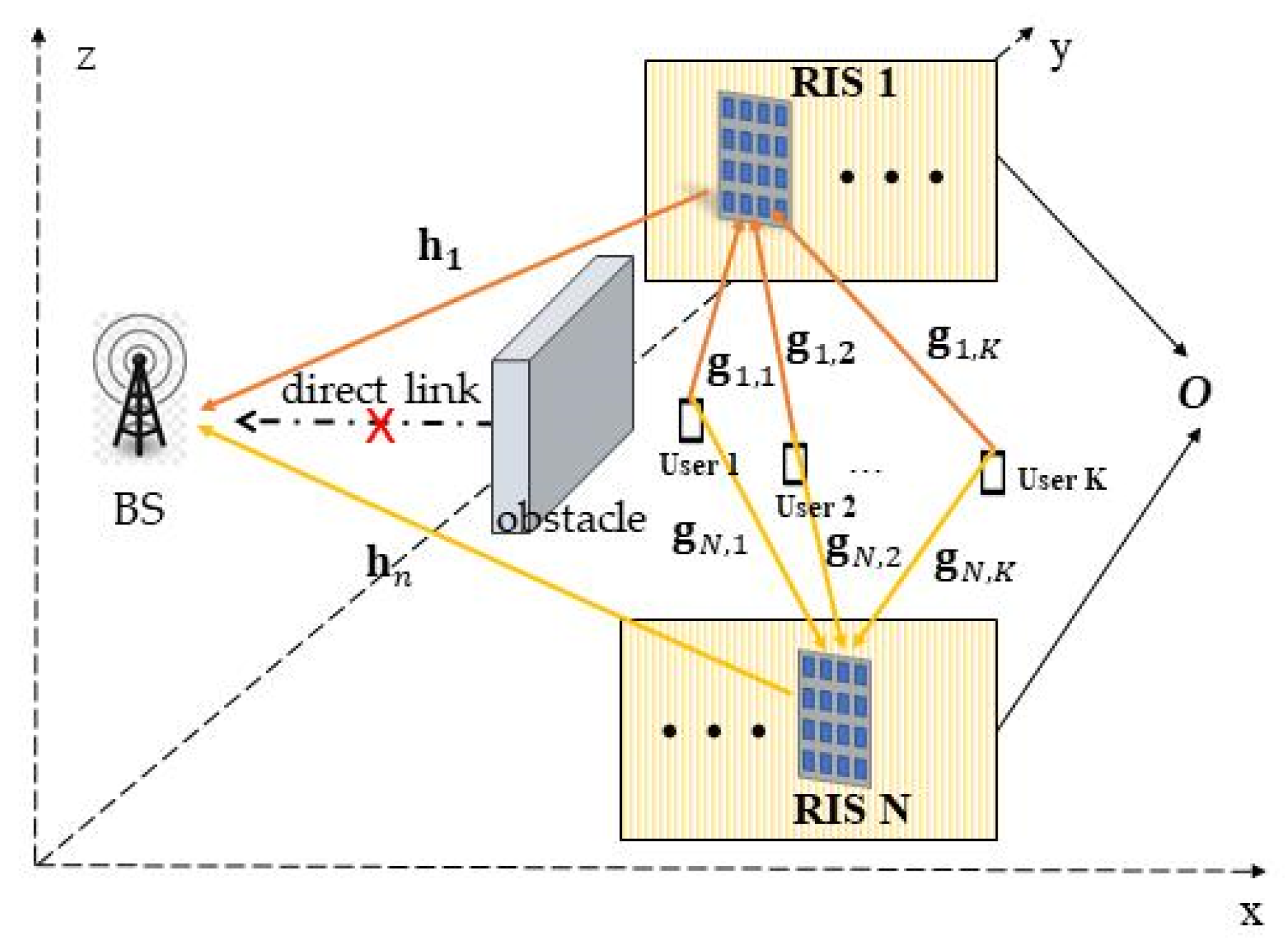
- We propose a multi-RIS-assisted NOMA communication system, which considers the deployment optimization of multi-RIS.
- ●
- This paper designs the sum-rate maximization problem of joint multi-RIS phase-shift matrix optimization, users’ power optimization, and multi-RIS deployment optimization, and the original problem is decomposed into three sub-problems.
- ●
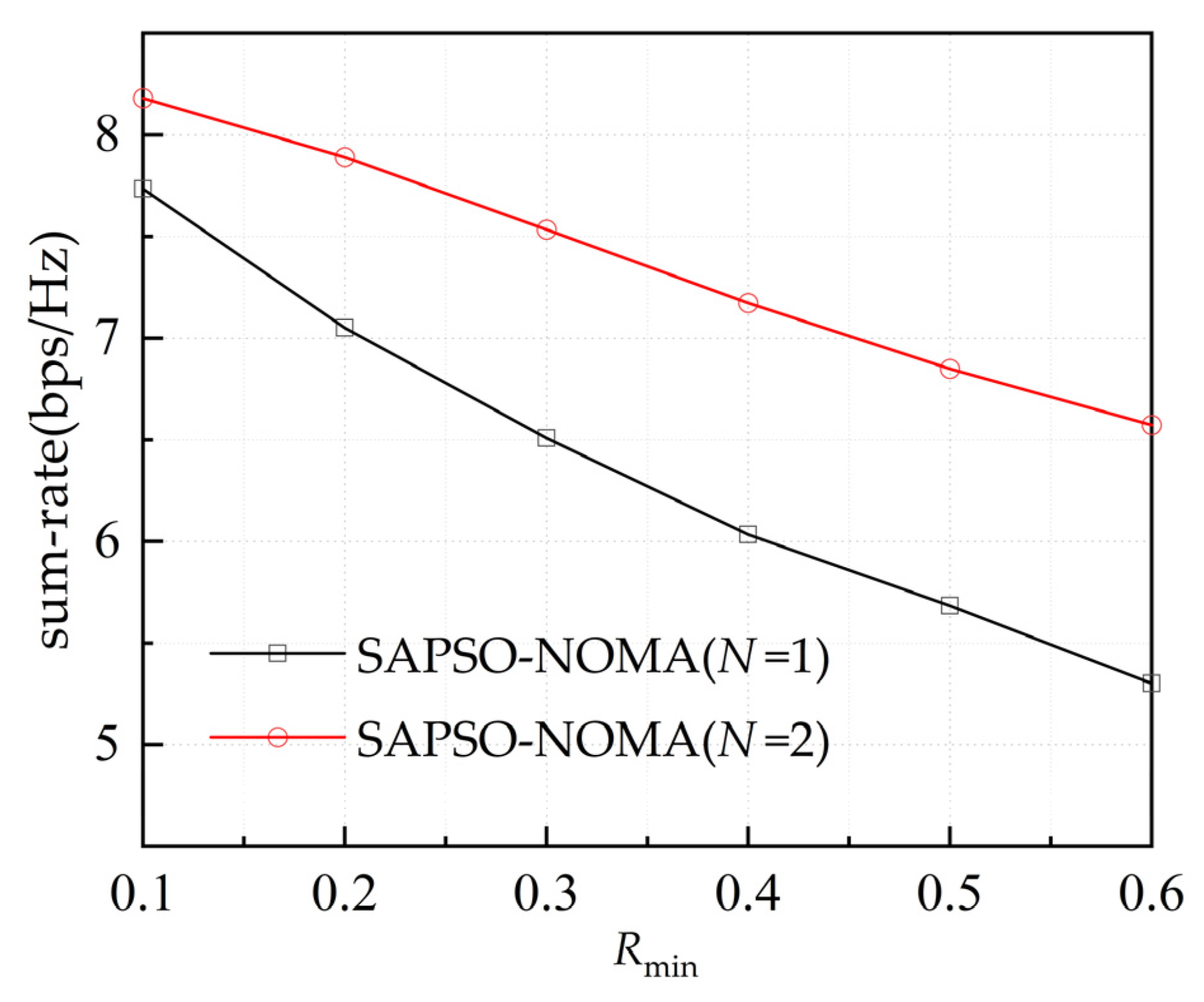
- Using the proposed multi-RIS deployment optimization algorithm, the sum-rate of the system can effectively be improved by about 1 bps/Hz. In addition, compared with a single-RIS scheme and a time-division multiple-access (TDMA) scheme, the proposed multi-RIS–NOMA scheme can significantly improve the sum-rate of the system.
2. System Model
3. Problem Formulation and Joint Optimization
3.1. Problem Formulation
3.2. Optimization of Three Sub-Problems
3.2.1. Multi-RIS Phase-Shift Optimization Based on SDR
3.2.2. Optimization of Users’ Power
3.2.3. Multi-RIS Deployment Algorithm Based on SAPSO
| Algorithm 1 The algorithm based on SAPSO to solve P(7) |
| Initialize: particle population number m, maximum inertia weight , minimum inertia weight , maximum number of iterations , initial annealing temperature , initial temperature , cooling coefficient , velocity and position of all particles, Individual extreme position , individual extreme , global optimum position , global optimum . Iteration: 1: while do 2: for do 3: Calculate ; 4: if then 5: Set , ; 6: else if then 7: Set , ; 8: Update , by Equation (21); 9: end elseif 10: end if 11: if then 12: Set , ; 13: end if 14: Update by Equation (20); 15: Update , by Equation (18) and Equation (19), respectively; 16: Set ; 17: end for 18: Set t = t + 1; 19: end while 20: output: The multi-RIS deployment locations |
3.3. Complexity Analysis
4. Simulation Result
5. Conclusions
6. Future Research
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BS | Base station |
| NOMA | Non-orthogonal multiple access |
| TDMA | Time division multiple access |
| OMA | Orthogonal multiple access |
| RIS | Reconfigurable intelligent surface |
| LOS | Line-of-sight |
| NLOS | Non-line-of-sight |
| AWGN | Additive white Gaussian noise |
| SIC | Successive interference cancelation |
| QoS | Quality-of-service |
Appendix A
References
- Huang, C.; Hu, S.; Alexandropoulos, G.C.; Zappone, A.; Yuen, C.; Zhang, R.; Renzo, M.D. Holographic MIMO Surfaces for 6G Wireless Networks: Opportunities, Challenges, and Trends. IEEE Wirel. Commun. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Beamforming Optimization for Wireless Network Aided by Intelligent Reflecting Surface with Discrete Phase Shifts. IEEE Trans. Commun. 2020, 68, 1838–1851. [Google Scholar] [CrossRef]
- Zheng, B.; You, C.; Zhang, R. Double-IRS Assisted Multi-User MIMO: Cooperative Passive Beamforming Design. IEEE Trans. Commun. 2021, 20, 4513–4526. [Google Scholar] [CrossRef]
- Pei, X.; Yin, H.; Tan, L.; Cao, L.; Li, Z.; Wang, K.; Zhang, K.; Björnson, E. RIS-Aided Wireless Communications: Prototyping, Adaptive Beamforming, and Indoor/Outdoor Field Trials. IEEE Trans. Commun. 2021, 69, 8627–8640. [Google Scholar] [CrossRef]
- Zheng, Z.; You, C.; Mei, W.; Zhang, R. A Survey on Channel Estimation and Practical Passive Beamforming Design for Intelligent Reflecting Surface Aided Wireless Communications. IEEE Commun. Surv. Tutor. 2022, 24, 1035–1071. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, Q.; Yan, S.; Shu, F.; Li, J. UAV-Enabled Secure Communications: Joint Trajectory and Transmit Power Optimization. IEEE Trans. Veh. Technol. 2019, 68, 4069–4073. [Google Scholar] [CrossRef]
- Yan, W.; Yuan, X.; He, Q.; Kuai, X. Passive Beamforming and Information Transfer Design for Reconfigurable Intelligent Surfaces Aided Multiuser MIMO Systems. IEEE J. Sel. Areas Commun. 2020, 38, 1793–1808. [Google Scholar] [CrossRef]
- Chen, Y.; Ai, B.; Zhang, H.; Niu, Y.; Song, L.; Han, Z.; Poor, H. Reconfigurable Intelligent Surface Assisted Device-to-Device Communications. IEEE Trans. Wirel. Commun. 2021, 20, 2792–2804. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, C.; Fu, Y.; Wang, H.; Yang, G.; Ma, S. Achievable diversity order of HARQ-aided downlink NOMA systems. IEEE Trans. Veh. Technol. 2020, 69, 471–487. [Google Scholar] [CrossRef]
- Khan, A.; Usman, M.A.; Usman, M.R.; Ahmad, M.; Shin, S.-Y. Link and System-Level NOMA Simulator: The Reproducibility of Research. Electronics 2021, 10, 2388. [Google Scholar] [CrossRef]
- Marques da Silva, M.; Dinis, R.; Martins, G. On the Performance of LDPC-Coded Massive MIMO Schemes with Power-Ordered NOMA Techniques. Appl. Sci. 2021, 11, 8684. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Elkashlan, M.; Ding, Z.; Nallanathan, A.; Hanzo, L. Non-orthogonal multiple access for 5G and beyond. Proc. IEEE 2017, 105, 2347–2381. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Renzo, M.D.; Hao, Y.; Wang, J.; Swindlehurst, A.; et al. Reconfigurable Intelligent Surfaces for 6G Systems: Principles, Applications, and Research Directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Ding, Z.; Lv, L.; Fang, F.; Dobre, O.A.; Karagiannidis, G.K.; Al-Dhahir, N.; Schober, R.; Poor, H. A State-of-the-Art Survey on Reconfigurable Intelligent Surface-Assisted Non-Orthogonal Multiple Access Networks. Proc. IEEE 2022, 110, 1358–1379. [Google Scholar] [CrossRef]
- Maraqa, O.; Rajasekaran, S.; Al-Ahmadi, S.; Yanikomeroglu, H.; Sait, S.M. A Survey of Rate-Optimal Power Domain NOMA with Enabling Technologies of Future Wireless Networks. IEEE Commun. Surv. Tutor. 2020, 22, 2192–2235. [Google Scholar] [CrossRef]
- Ding, Z.; Poor, H.V. A Simple Design of IRS-NOMA Transmission. IEEE Commun. Lett. 2020, 24, 1119–1123. [Google Scholar] [CrossRef]
- Zheng, B.; Wu, Q.; Zhang, R. Intelligent Reflecting Surface-Assisted Multiple Access with User Pairing: NOMA or OMA? IEEE Commun. Lett. 2020, 24, 753–757. [Google Scholar] [CrossRef]
- Yue, X.; Liu, Y. Performance Analysis of Intelligent Reflecting Surface Assisted NOMA Networks. IEEE Trans. Wirel. Commun. 2022, 21, 2623–2636. [Google Scholar] [CrossRef]
- Zeng, M.; Li, X.; Li, G.; Hao, W.; Dobre, A.D. Sum-rate Maximization for IRS-Assisted Uplink NOMA. IEEE Commun. Lett. 2021, 25, 234–238. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, M.; Zhang, Q.; Qin, J. Joint Beamforming Design in Multi-Cluster MISO NOMA Reconfigurable Intelligent Surface-Aided Downlink Communication Networks. IEEE Trans. Commun. 2021, 69, 664–674. [Google Scholar] [CrossRef]
- Shehab, M.; Ciftler, B.S.; Khattab, T.; Abdallah, M.M.; Trinchero, D. Deep Reinforcement Learning Powered IRS-Assisted Downlink NOMA. IEEE Open J. Commun. Soc. 2022, 3, 729–739. [Google Scholar] [CrossRef]
- Chen, D.; Yao, J.; Lin, Y.; Li, Y.; Zhang, H. Research on Coverage Enhancement and Sum-rate Maximization of 5G NOMA Network Based on Multiple IRSs. In Proceedings of the 2022 IEEE 5th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 16–18 December 2022; pp. 1349–1354. [Google Scholar]
- Yang, Z.; Chen, M.; Saad, W.; Xu, W.; Shikh-Bahaei, M.; Poor, H.V.; Cui, S. Energy-Efficient Wireless Communications with Distributed Reconfigurable Intelligent Surfaces. IEEE Trans. Wirel. Commun. 2022, 21, 665–679. [Google Scholar] [CrossRef]
- Do, T.N.; Kaddoum, G.; Nguyen, T.L.; da Costa, D.B.; Haas, Z.J. Multi-RIS-Aided Wireless Systems: Statistical Characterization and Performance Analysis. IEEE Trans. Commun. 2021, 69, 8641–8658. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, H.V. Intelligent Reflecting Surface Enhanced Multi-UAV NOMA Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3051–3066. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Network: Joint Active and Passive Beamforming Design. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Ji, Q.; Chen, Q.; Song, C. Improved Particle Swarm Optimization Geomagnetic Matching Algorithm Based on Simulated Annealing. IEEE Access. 2020, 8, 226064–226073. [Google Scholar] [CrossRef]
- Li, C.; You, F.; Yao, T.; Wang, J.; Shi, W.; Peng, J.; He, S. Simulated Annealing Particle Swarm Optimization for High-Efficiency Power Amplifier Design. IEEE Trans. Microw. Theory Tech. 2021, 69, 2494–2505. [Google Scholar] [CrossRef]
- Zhou, T.; Sun, W. Optimization of Battery–Supercapacitor Hybrid Energy Storage Station in Wind/Solar Generation System. IEEE Trans. Sustain. Energy 2014, 5, 408–415. [Google Scholar] [CrossRef]
- Luo, Z.; Ma, W.; So, A.M.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Schober, R. Joint Deployment and Multiple Access Design for Intelligent Reflecting Surface Assisted Networks. IEEE Trans. Wirel. Commun. 2021, 20, 6648–6664. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L.; Chen, X.; Liu, C.; Yang, F.; Schober, R.; Poor, H.V. Active RIS vs. Passive RIS: Which Will Prevail in 6G? IEEE Trans. Commun. 2023, 71, 1707–1725. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, D.; Ji, J. Sum-Rate Maximization Scheme for Multi-RIS-Assisted NOMA Uplink Systems. Electronics 2024, 13, 969. https://doi.org/10.3390/electronics13050969
Qiu D, Ji J. Sum-Rate Maximization Scheme for Multi-RIS-Assisted NOMA Uplink Systems. Electronics. 2024; 13(5):969. https://doi.org/10.3390/electronics13050969
Chicago/Turabian StyleQiu, Debao, and Jianbo Ji. 2024. "Sum-Rate Maximization Scheme for Multi-RIS-Assisted NOMA Uplink Systems" Electronics 13, no. 5: 969. https://doi.org/10.3390/electronics13050969
APA StyleQiu, D., & Ji, J. (2024). Sum-Rate Maximization Scheme for Multi-RIS-Assisted NOMA Uplink Systems. Electronics, 13(5), 969. https://doi.org/10.3390/electronics13050969