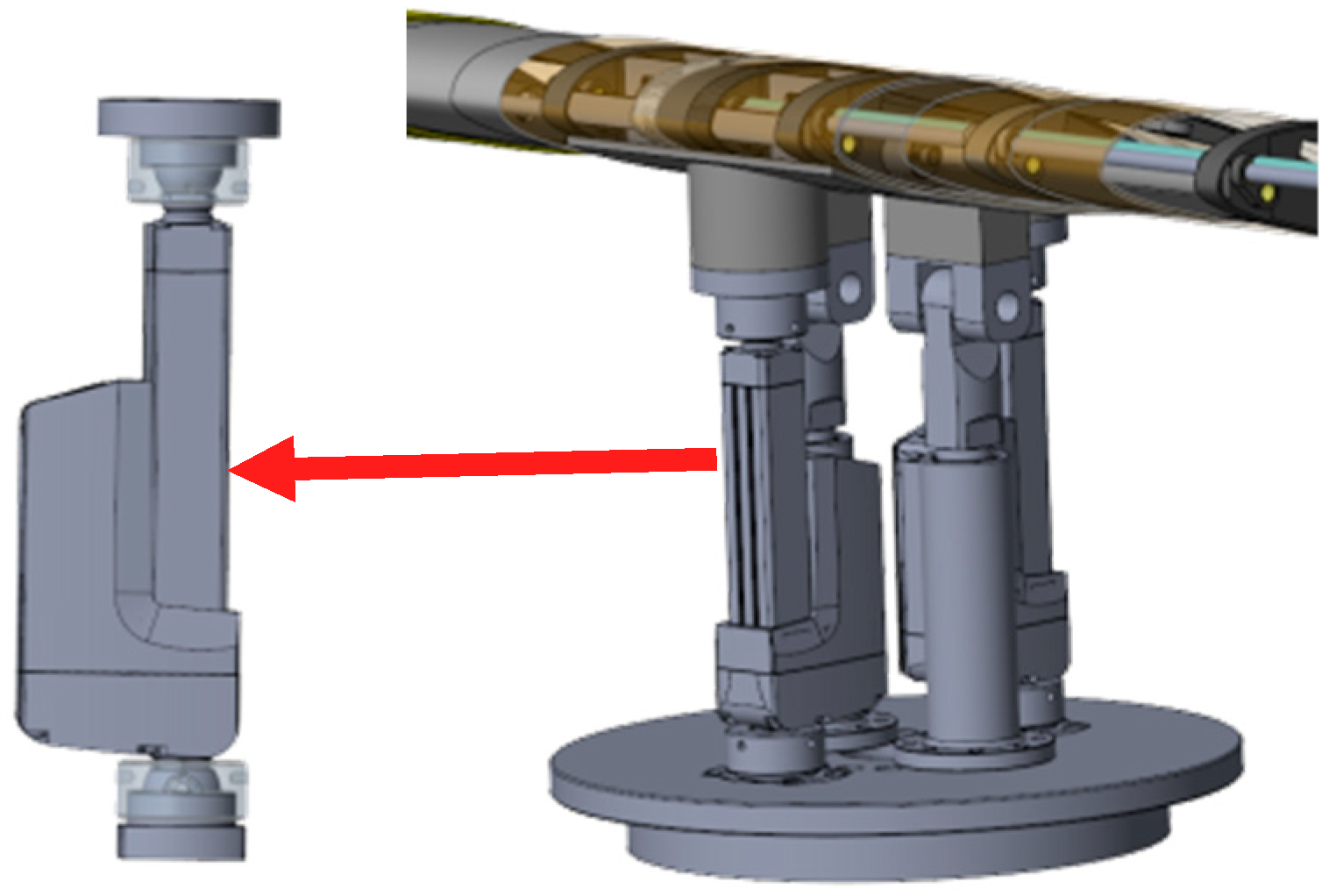
The high-speed train lifting wing represents a novel mechanism designed to achieve train speed reduction and reduce axle weight. This objective is achieved by generating a lift force through precise control of the angle of attack. The structure of the lifting wing is composed of three main components: the angle-of-attack conversion section, the bottom rotation section, and the wing tail contraction section. Notably, the angle of attack conversion section features an electric actuator that is synchronized precisely using two motors.
The precision requirements for angle-of-attack control are stringent due to dynamic load variations on the electric actuator resulting from real-time system changes. Furthermore, the system is subject to numerous internal and external disturbances. Therefore, it is of great importance to achieve precise synchronization between the two motors and possess robust abilities in disturbance rejection.
In the early development of multi-motor synchronous control technology, mechanical linkage-based approaches depended on transmission levers and gear meshing to interconnect multiple motors. However, these systems were plagued by numerous internal and external disturbances, leading to compromised robustness. Along with this, control methods such as master-command control [
1], master-slave control, cooperative control, cross-coupling control, and virtual-shaft control [
2,
3]—well-suited for dual-motor control—have been proposed. Synchronization control methods aim to enhance the stability of the system. However, to address the internal and external perturbation issues in this multi-motor synchronous system, Han [
4] proposed the Auto-Disturbance Rejection Control (ADRC) which effectively resolves these challenges. Beyond selecting superior controllers, exploring controller optimization methods is also valuable. In the realm of optimizing conventional controllers, Thor et al. [
5] proposed a method for legged robots’ controllers, termed the CPG-RBF network. This method merges the Central Pattern Generator (CPG) with the Radial Basis Function (RBF) network for online adaptive control. Makarem et al. [
6] utilized a data-driven approach to iteratively adjust the parameters of the Proportional-Integral-Derivative (PID) controller, thus enhancing its robustness and diminishing its dependency on parameters. Gheisarnejad et al. [
7] introduced a controller leveraging deep deterministic policy gradient (DDPG) technology, which minimizes observer estimation errors and enhances the dynamic characteristics of the controller. Regarding the optimization of the ADRC controller, Wang et al. [
8] proposed a novel Deep Reinforcement Learning (DRL)-based ADRC to enhance the performance of Permanent Magnet Synchronous Motors (PMSMs). Yang et al. [
9] introduced an enhanced velocity compensator into a second-order Linear Auto-Disturbance Rejection Controller (LADRC) deviation coupling control structure, effectively enhancing system accuracy. Tian et al. [
10] optimized the extended state observer within the ADRC, suppressing the uncertainty ripple in the current loop and improving the stability of the PMSM system. Nguyen et al. [
11] examined the application of a method combining disturbance observer control (DOBC) and ADRC for speed control in PMSMs, improving the stability and robustness of the system. Wang et al. [
12] designed a speed controller employing the LADRC with Compensation Function Observer (CFO-LADRC). It addresses the trade-off between dynamic and immune performance. At the same time, it enhances the immunity performance of the system. Liu et al. [
13] examined how the error in the velocity loop, when fed back into the ADRC control through a cross-coupling structure. This enhanced the response speed and robustness of the system. Fang et al. [
14] proposed an ADRC method with an enhanced extended state observer (ESO) to design a cascade controller for Electromechanical Actuators (EMA) based on PMSM. Wang et al. [
15] designed a novel velocity compensator for the deviation coupling structure to compensate for and effectively mitigate self-referencing overruns. This novel compensator greatly enhanced the response and immunity of the system under high-frequency noise conditions. Zhang et al. [
16] considered that motor parameters vary with temperature during the synchronous operation of multiple motors. They applied a model reference adaptive algorithm to adjust ADRC parameters online, thereby improving the synchronous control performance of speed in the system. He et al. [
17] developed a ring-coupled structure. This structure uses a self-resistant compensator for current compensation in motors. Its purpose is to reduce the synchronization error in a multi-motor system. Abdalla et al. [
18] employed Particle Swarm Optimization (PSO) to self-optimize the ADRC parameters and reduce the coupling between these parameters. Yin et al. [
19] introduced the ant colony algorithm. This algorithm aims for self-seeking optimization of the ADRC parameters. They proved this approach results in a more robust ADRC controller than the conventional ADRC. Wang et al. [
20] introduced artificial intelligence algorithms into the parameter optimization process of the ADRC. They constructed a DRL parameter optimization model. This model automatically optimizes and adjusts the parameters of the controller in various application scenarios.
This paper centers on controlling the angle-of-attack conversion device in the lifting wing.The main contributions are summarized as follows:
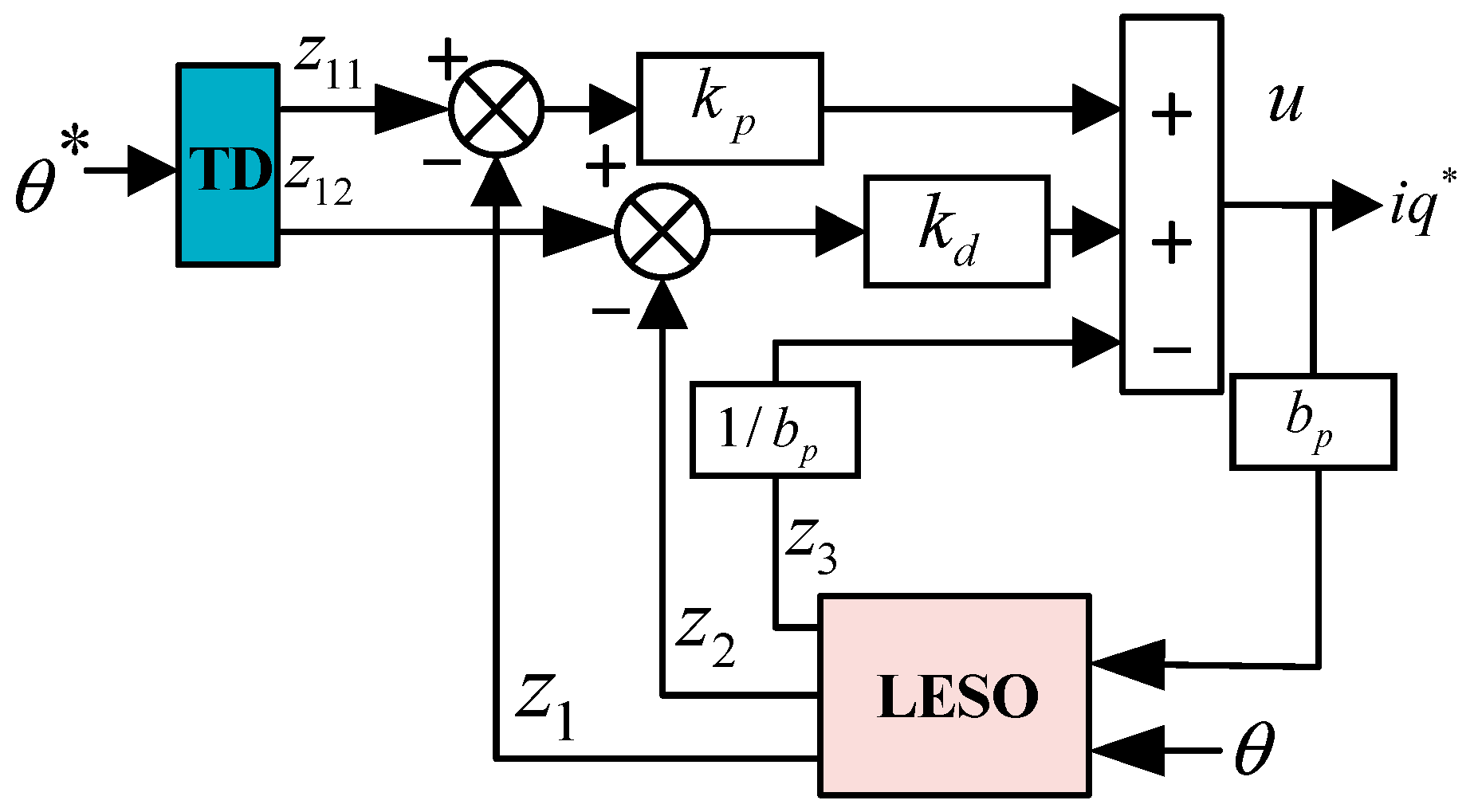
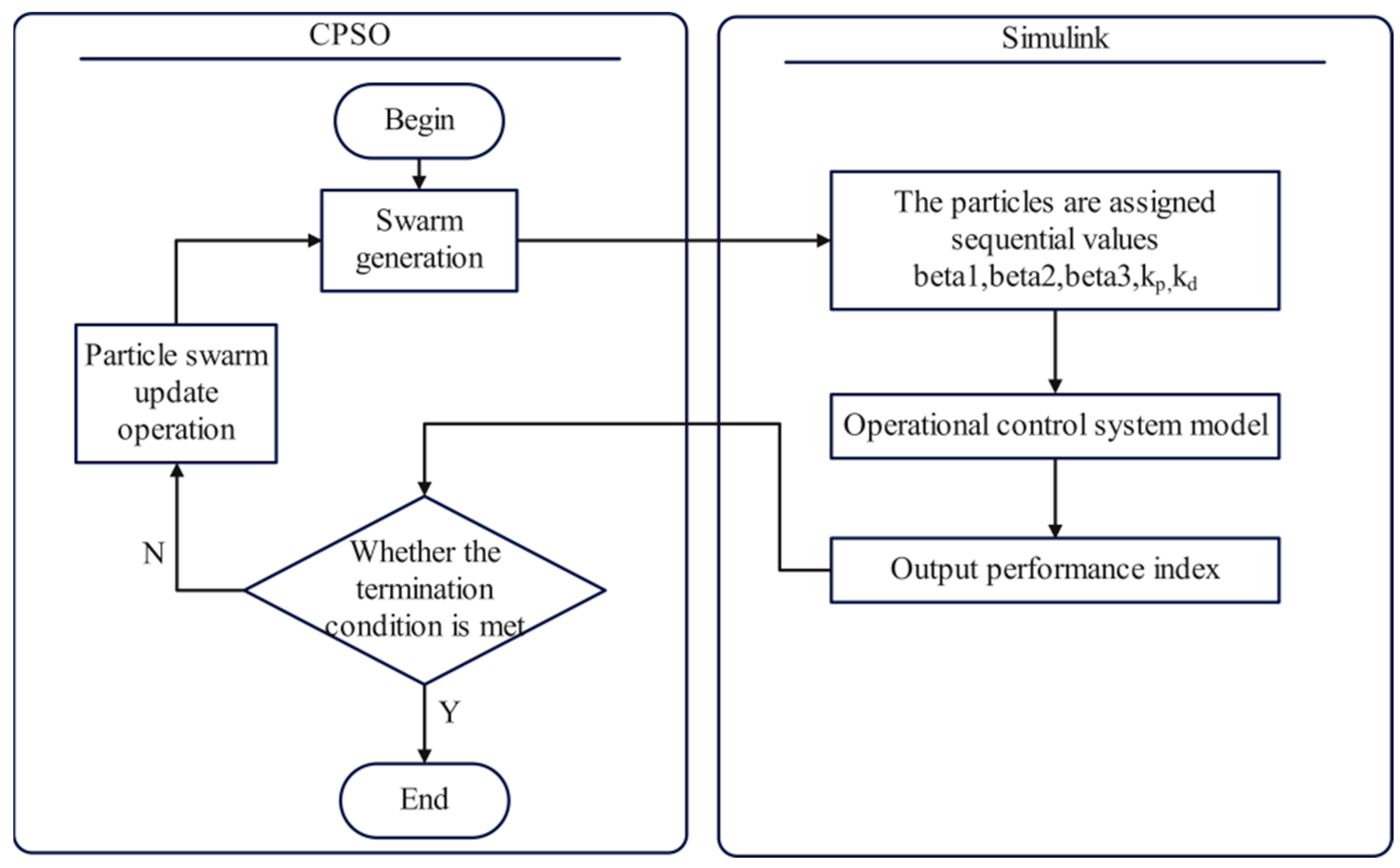
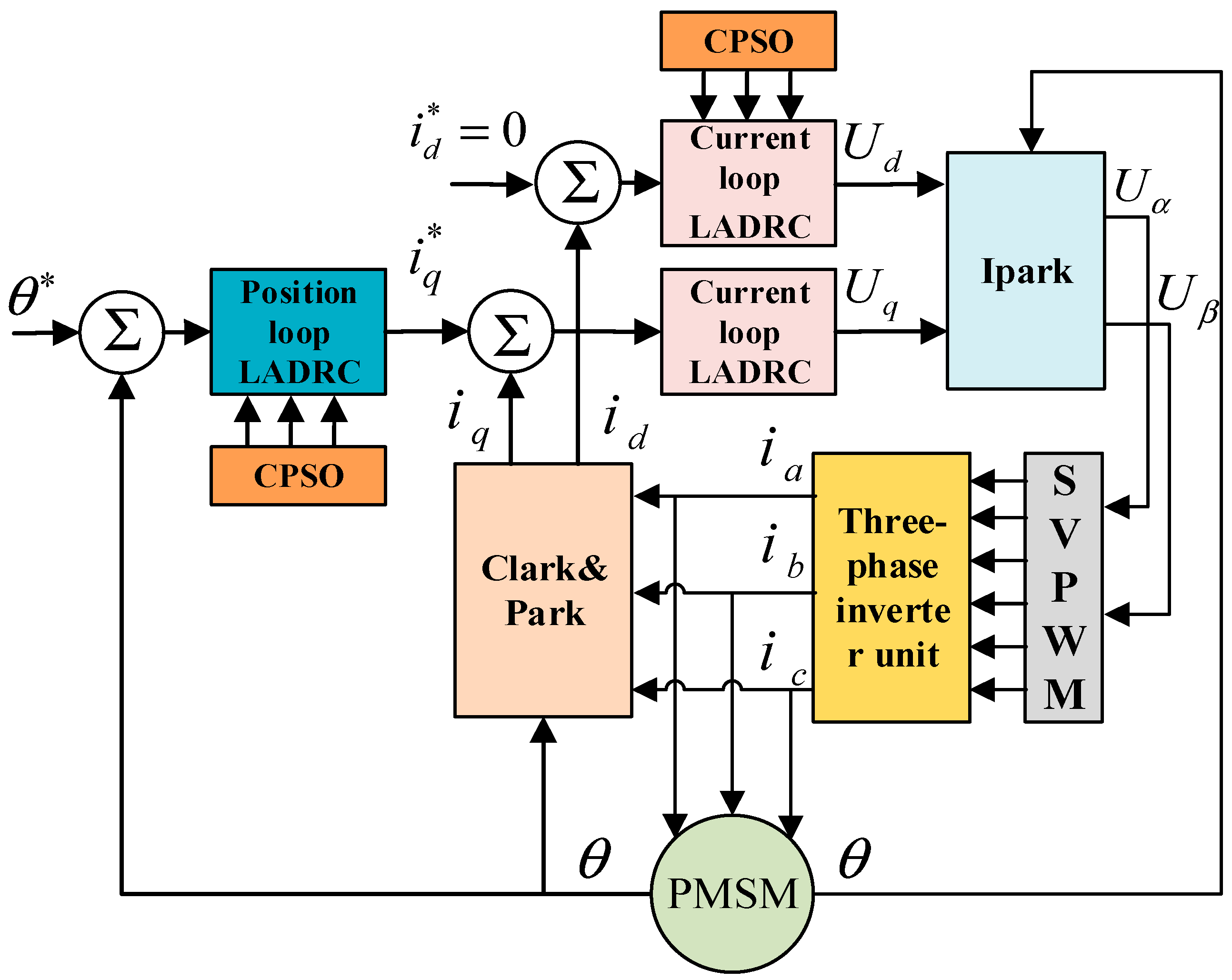
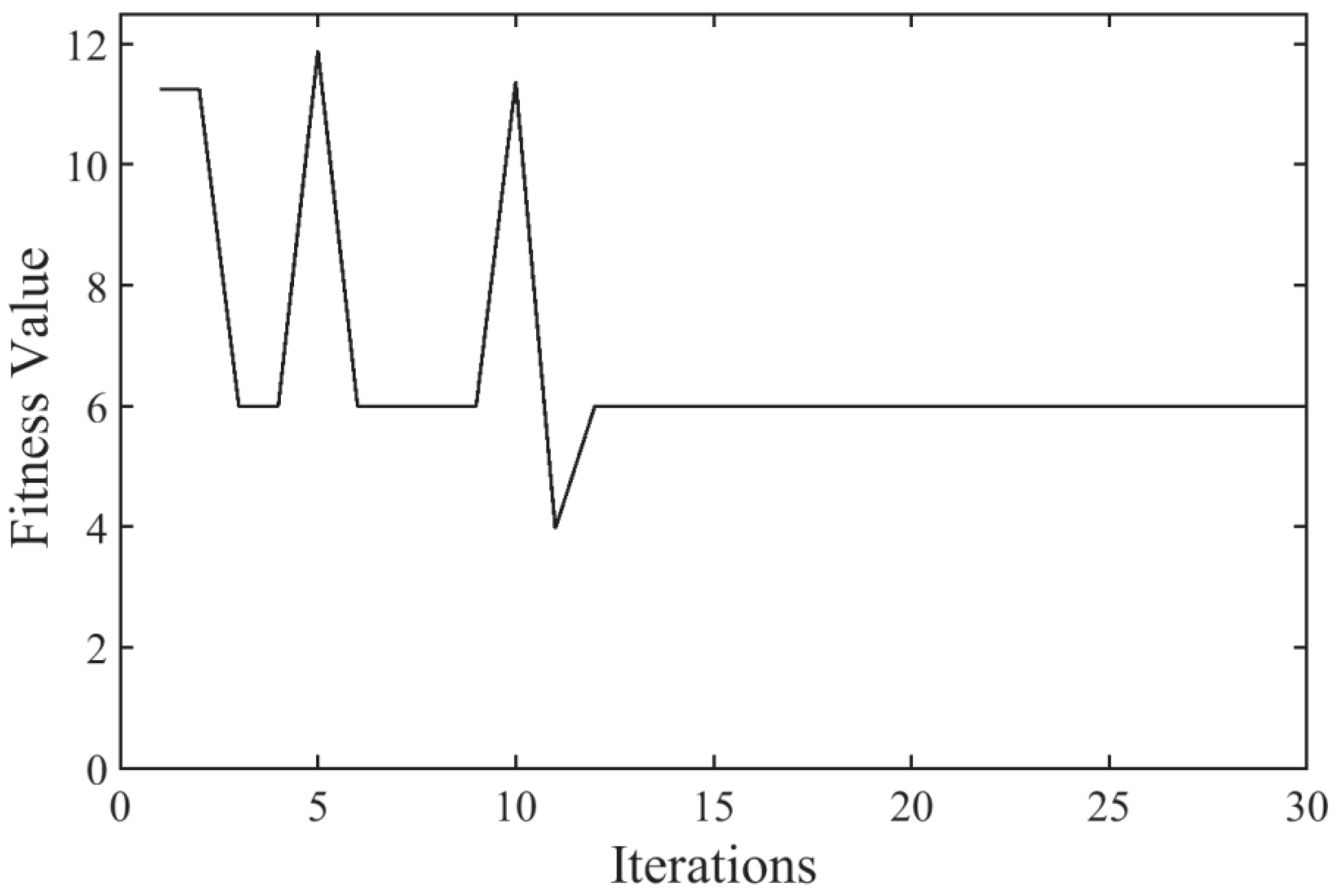
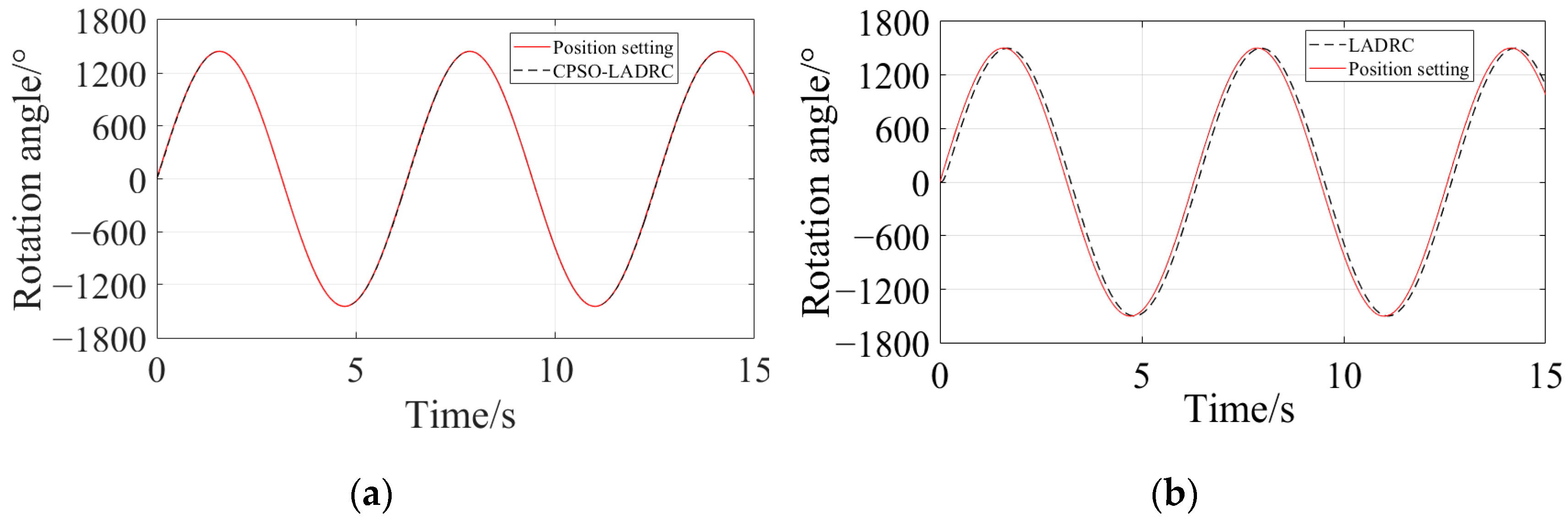
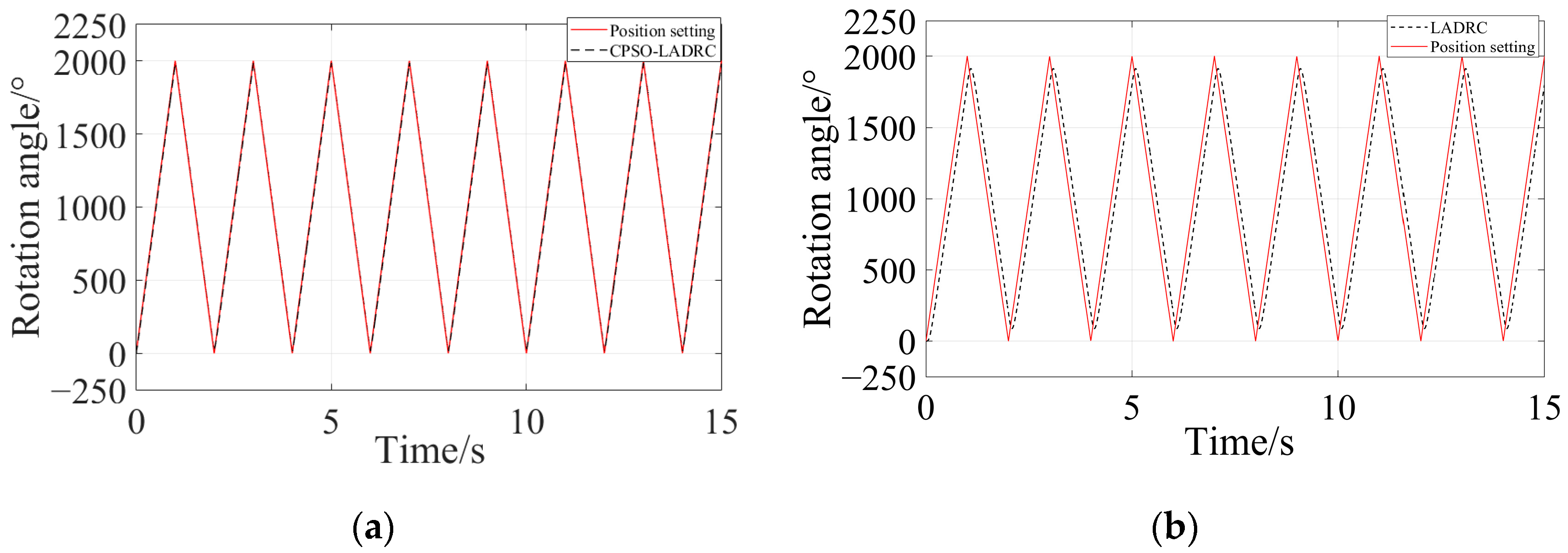
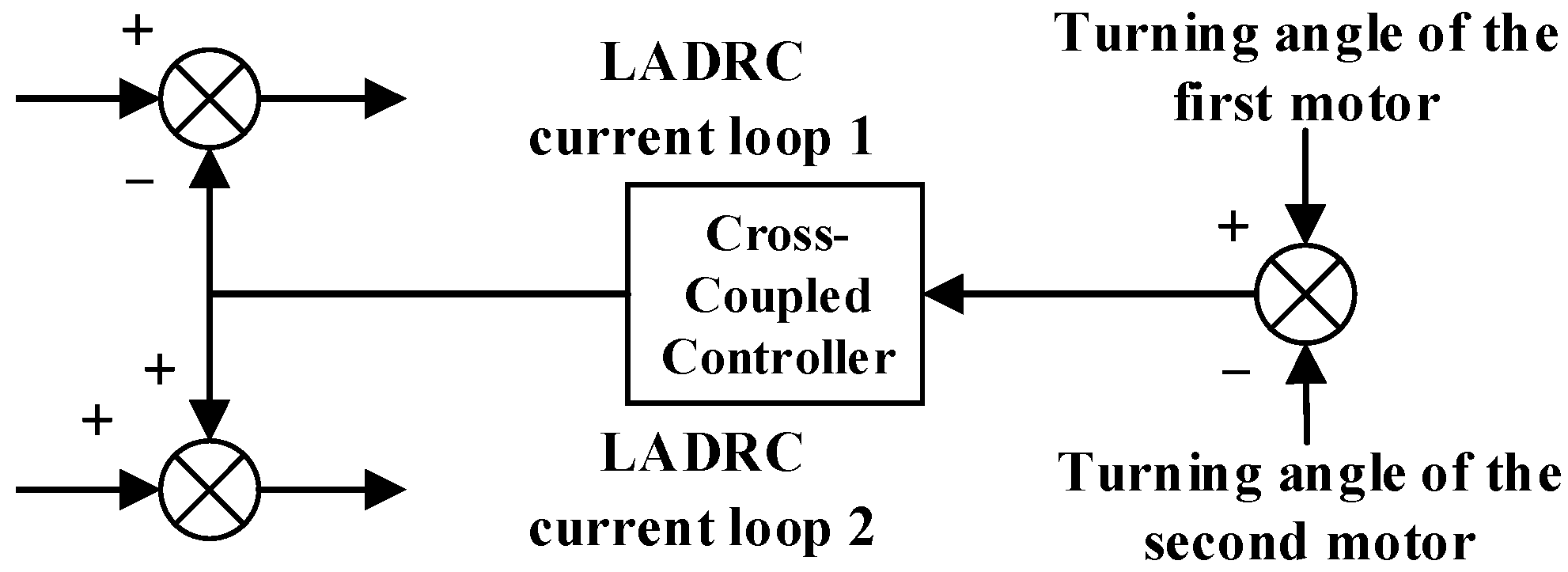
(b) The parameters of the ADRC system are optimized by using the Chaotic Particle Swarm Optimization (CPSO) algorithm. Subsequently, a cross-coupling structure is integrated into the improved LADRC double-loop position control of the servo motor. This structure feeds back the position error to the current loop, thereby enhancing the immunity and response speed of the system. Furthermore, this method effectively addresses the challenge of synchronous control, achieving seamless angle-of-attack conversion.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}