4.1. Control Mode
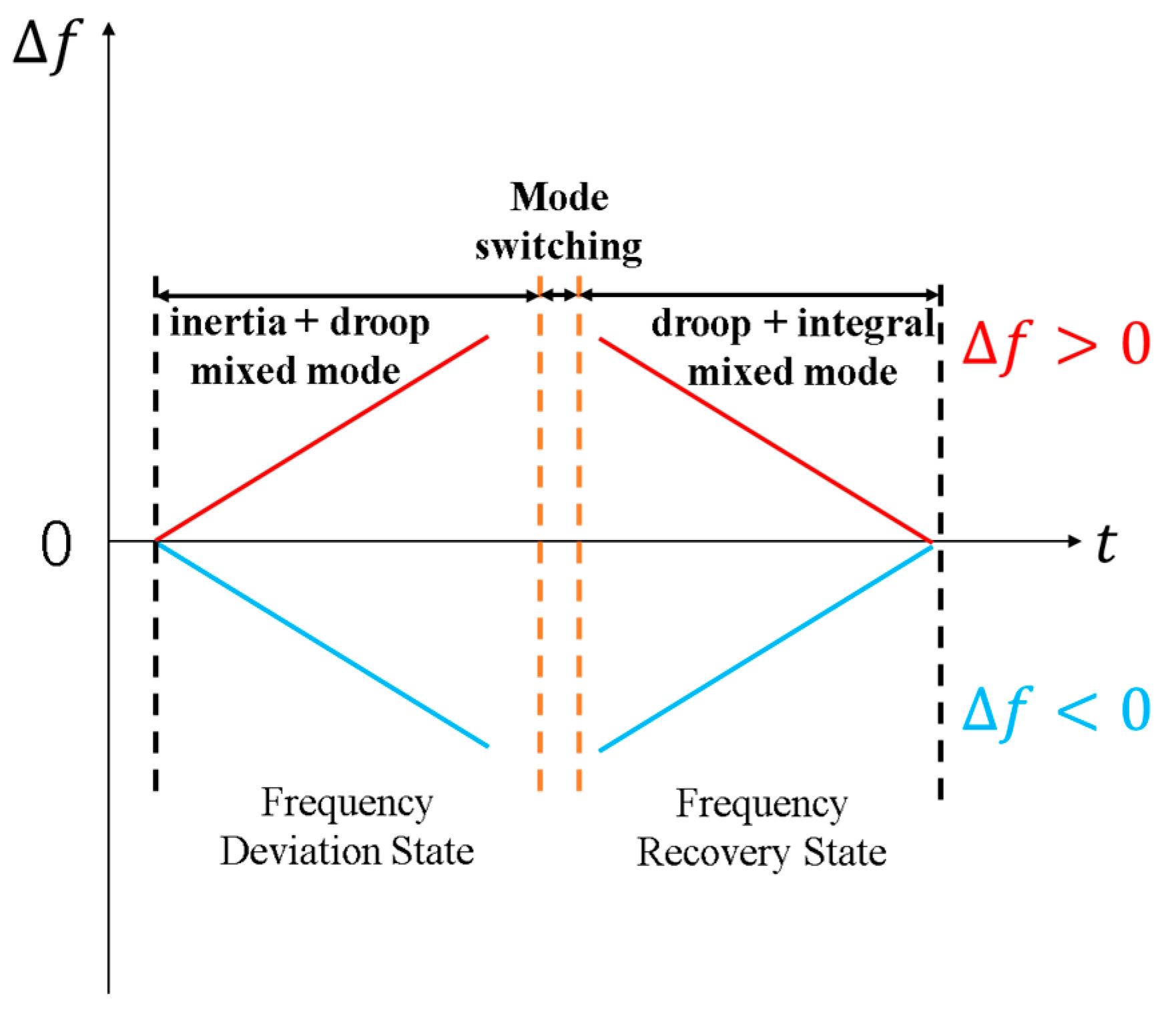
During the operation of the grid, the change in grid frequency can be divided into two states: the frequency deviation state and frequency recovery state. The frequency deviation state is the process wherein the frequency deviation value gradually increases shortly after the grid is subjected to load fluctuations; the frequency recovery state is the process wherein the frequency deviation value gradually decreases under the action of frequency regulation. This study adopts two modes and switches in real time to control the output of flywheel energy storage. In the frequency deviation state, the inertia + droop mixed mode is adopted, and in the frequency recovery state, the droop + integral mixed mode is used. There is a mode switching process between these two states, as shown in
Figure 5.
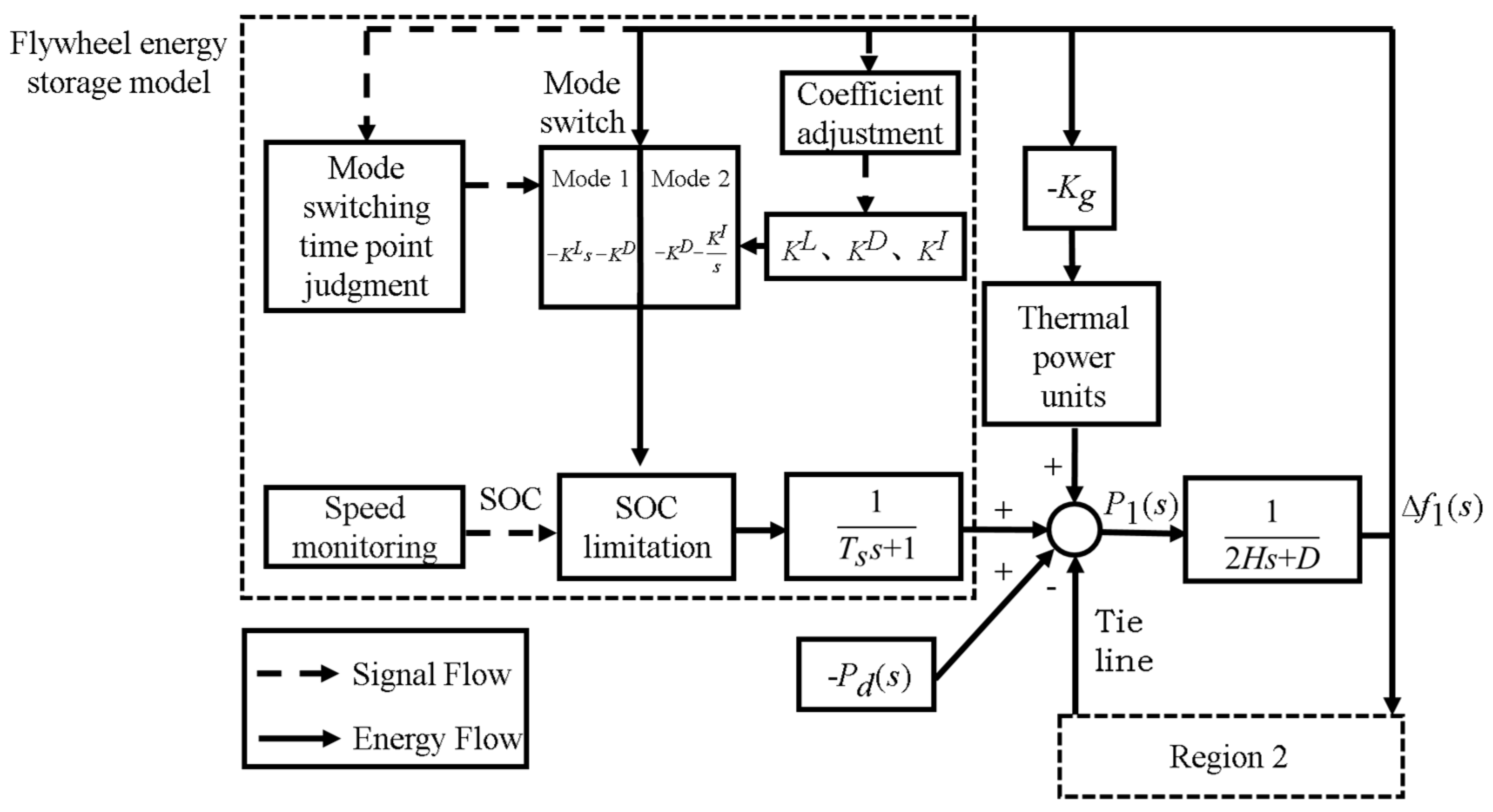
When working under two modes, the system calculates the output size command sent to the energy storage according to the control function corresponding to the mixed mode. The control function of the inertia + droop mixed mode can be expressed as:
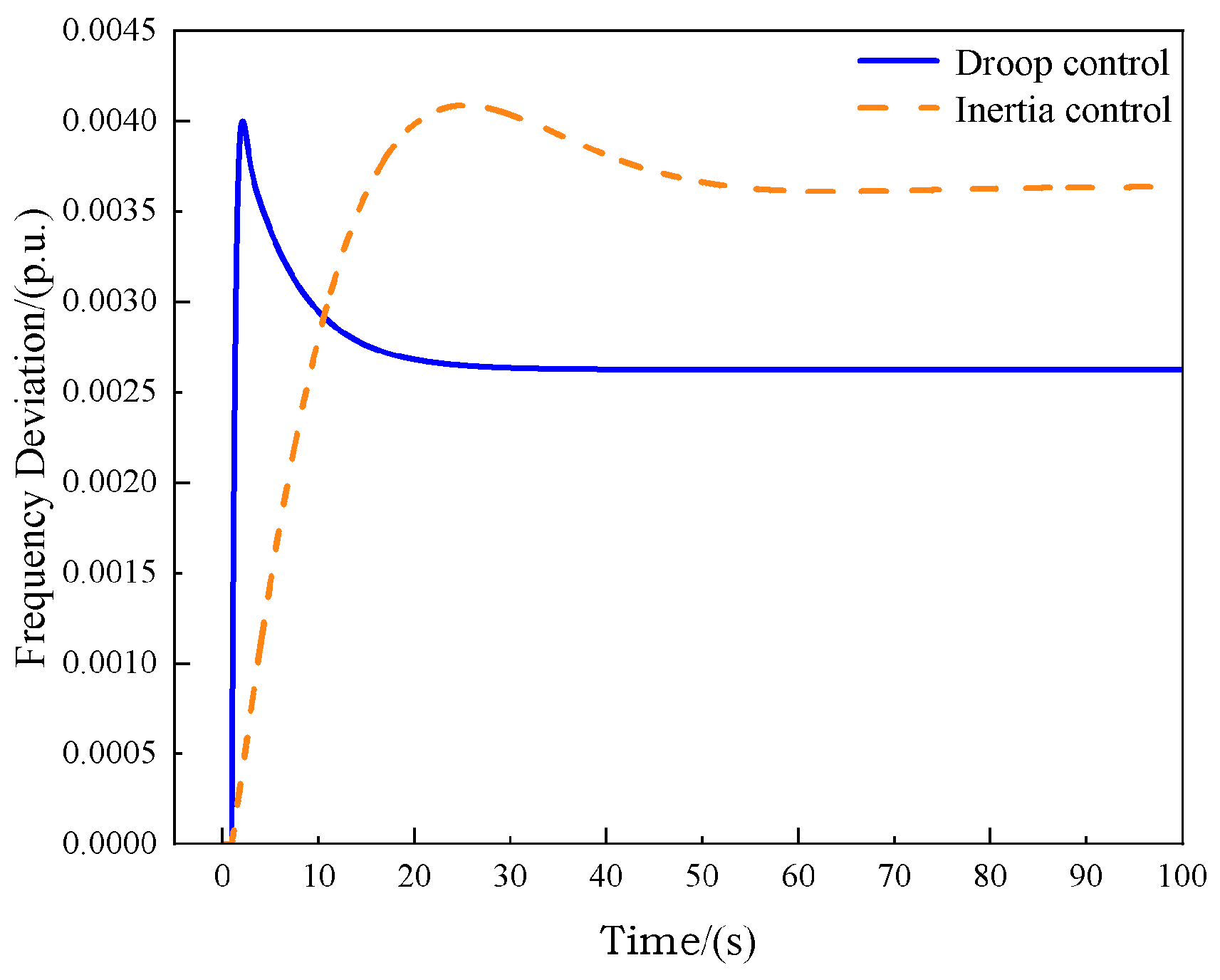
in which inertia control can monitor the slope of grid frequency fluctuation and suppress the deviation rate of frequency in the frequency deviation state, and if there is only inertia control, the time to enter the frequency recovery state will too late, which will cause the frequency deviation to be too large; thus, in this state, droop control is added to collaborate with inertia control, and droop control can accelerate the entry into the frequency recovery state and enhance the suppression of frequency deviation.
The control function of the droop + integral mixed mode can be expressed as:
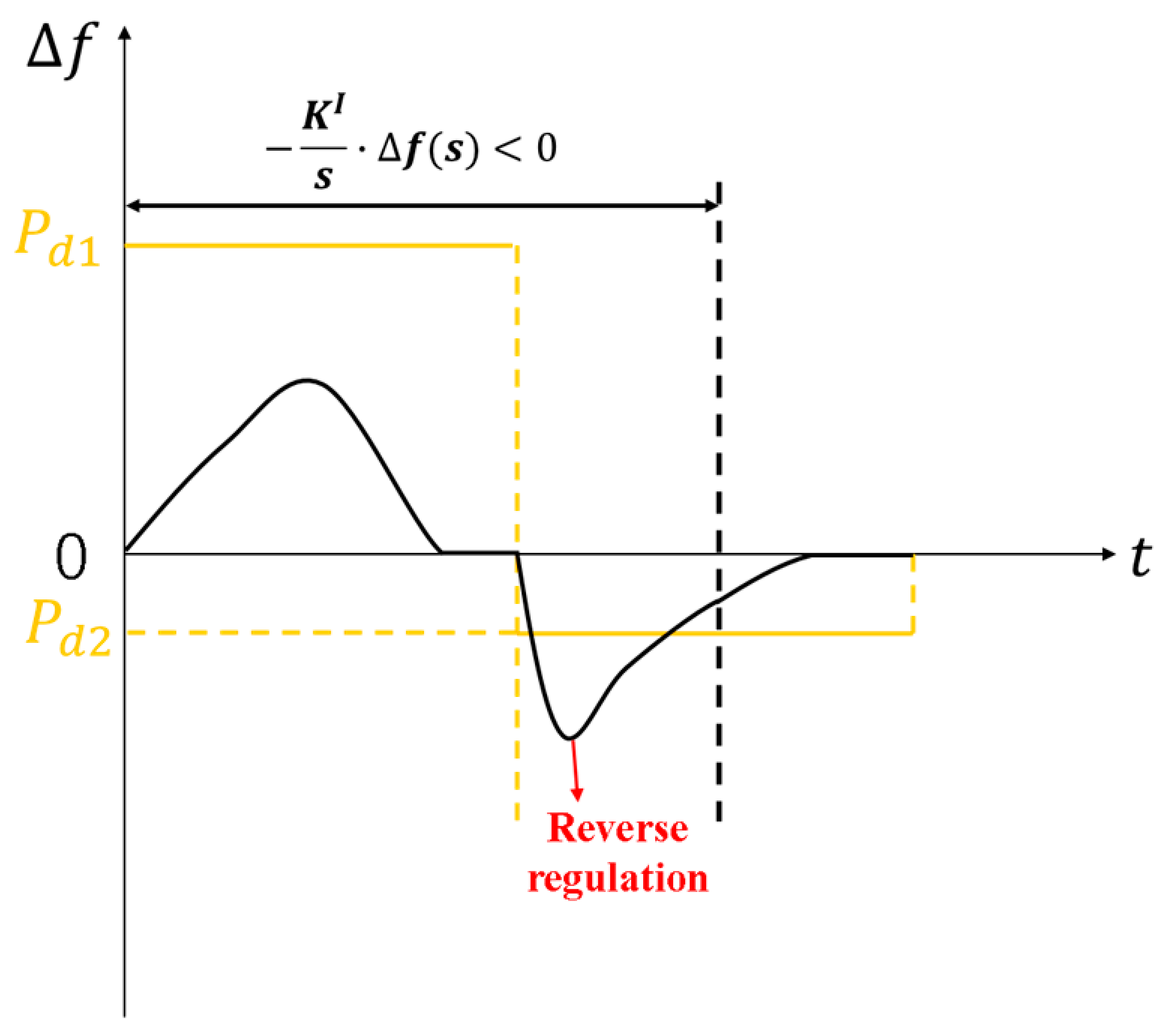
in which droop control can measure the deviation value of grid frequency fluctuation; in the frequency recovery state, it can quickly reduce the frequency deviation value, and it can reduce the frequency deviation degree when stable. If the system relies only on droop control, it will still have a certain frequency deviation in the end, and after adding integral control, the deviation can be further reduced. The integral control mode used in this study resets when the frequency deviation value crosses zero, to prevent the phenomenon of reverse regulation caused by integral control under continuous reverse disturbance, especially when the amplitude of the second load disturbance is smaller than the amplitude of the first load disturbance, as shown in
Figure 6. Reverse regulation causes the frequency deviation peak to be too large, affecting the frequency regulation effect.
This study sets the rated capacity of the thermal power units to 100 MW and the base frequency to 50 Hz. The subsequent related parameters are expressed in per-unit values based on the rated capacity and base frequency. In addition, the specifications of flywheel energy storage are set to 6 MW/0.5 MW·h according to the findings proposed in Reference [
22]. The parameters selection for the subsequent part refer to References [
6,
21].
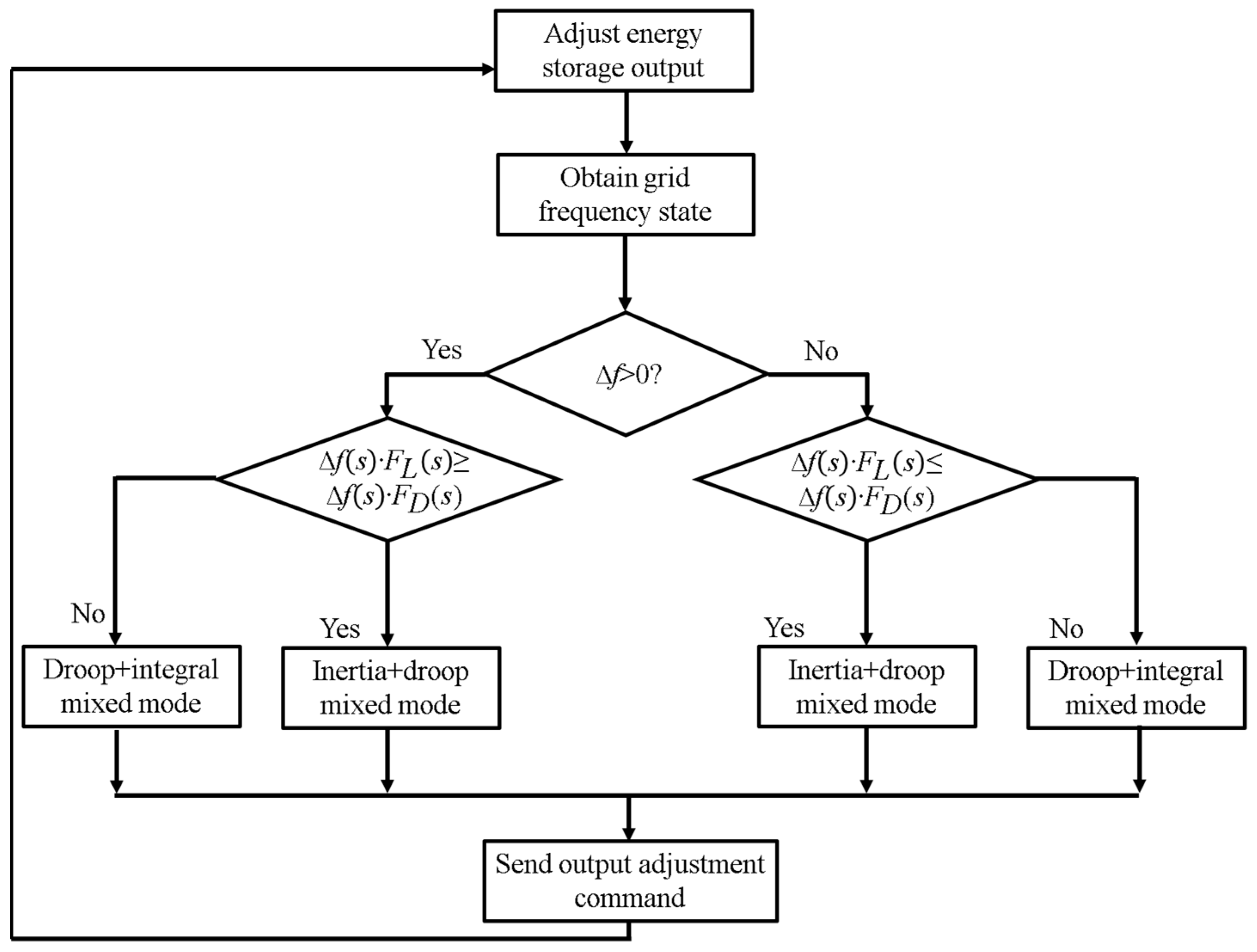
Assuming that KL, KD, and KI are constants, the mode switching threshold is set as a constant, and the tie-line power of other regions is not considered. The frequency state is determined according to the size relationship between the slope of the Δf curve and the mode switching threshold t0, and then the control mode switching is determined, specifically as follows:
If Δf > 0 and dΔf/dΔt > t0, use the inertia + droop mixed mode.
If Δf < 0 and dΔf/dΔt < −t0, use the inertia + droop mixed mode.
If Δf > 0 and dΔf/dΔt ≤ t0, use the droop + integral mixed mode.
If Δf < 0 and dΔf/dΔt ≥ −t0, use the droop + integral mixed mode.
This control mode is compared with the traditional control mode and the mixed control mode in Reference [
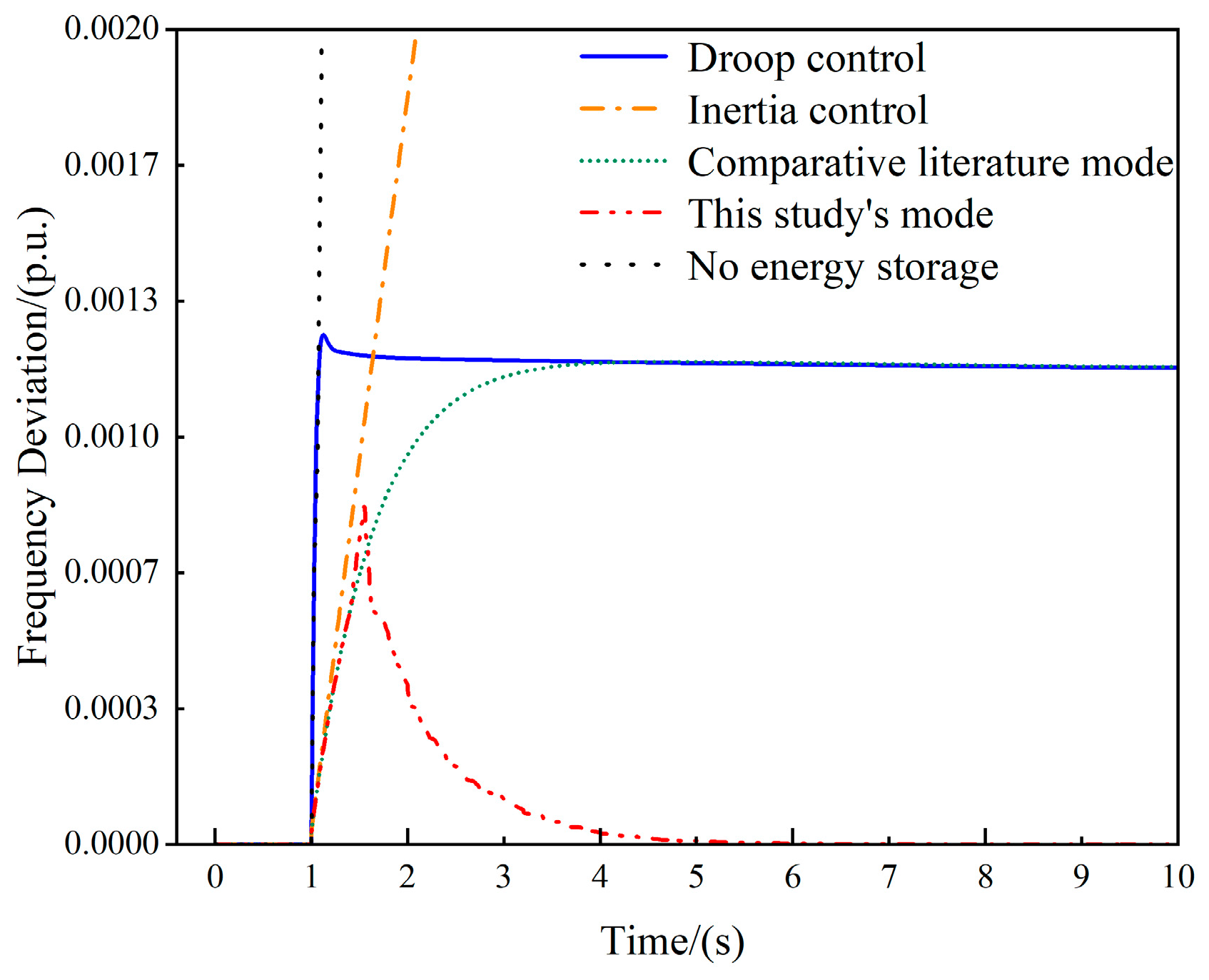
21] (the “inertia + droop” control switches to droop control, herein referred to as the “comparative literature mode”) under the step load disturbance (−0.05 p.u. applied at 1 s). The frequency deviation is shown in
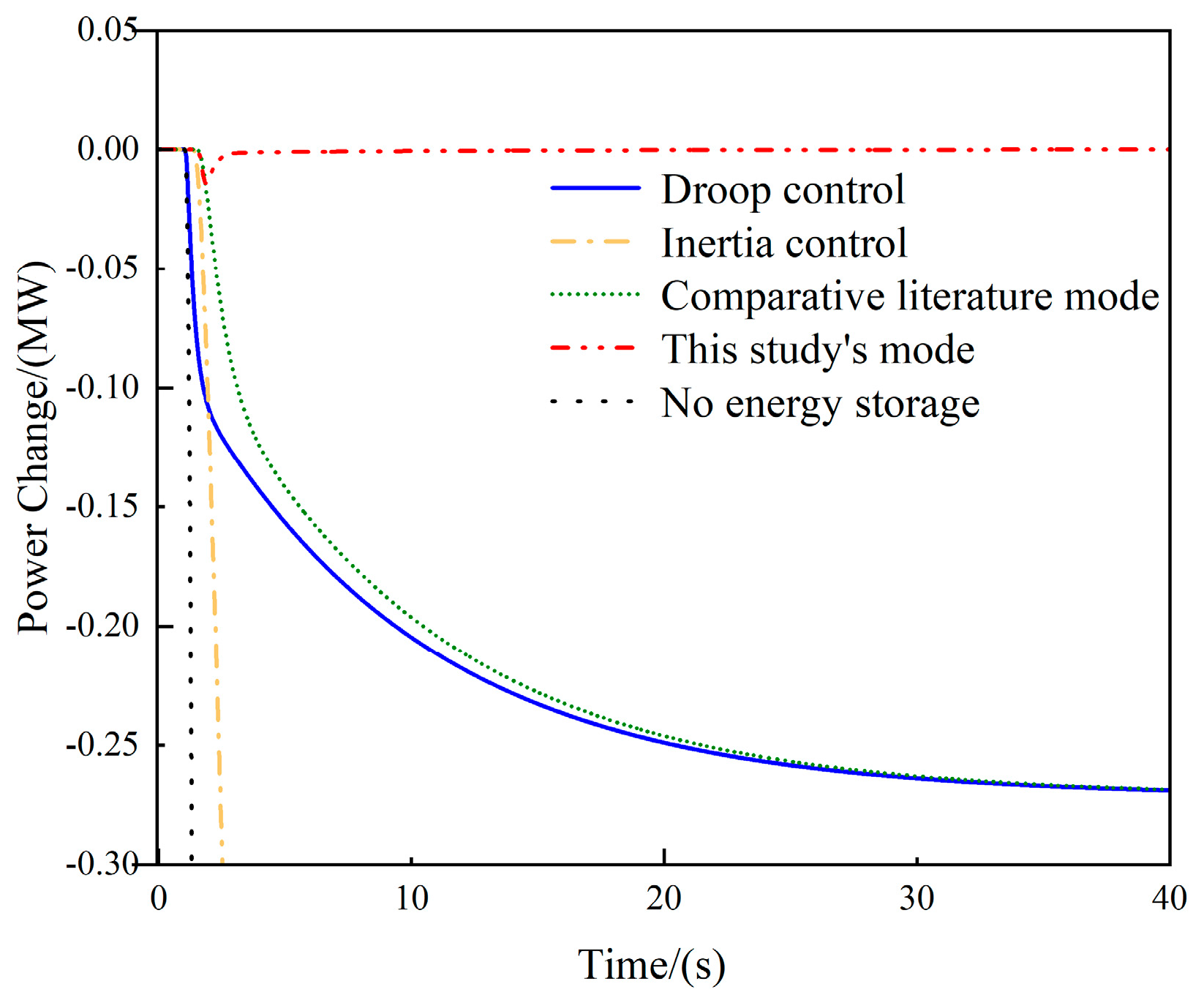
Figure 7, the power change in the thermal power units is shown in
Figure 8, and the corresponding frequency regulation indicators are shown in
Table 2 (the control coefficients
KL,
KD, and
KI of each control mode are equal:
KL is 50,
KD is 80, and
KI is 100).
In
Table 2, |Δ
fm| is the absolute value of the frequency deviation peak and
tp is the time from the start to the frequency deviation peak (the smaller these two values, the stronger the ability to suppress the deterioration of frequency regulation);
ts is the time from the start to the frequency stability (the smaller its value, the stronger the stabilizing effect of frequency regulation on the grid); Δ
fs is the steady-state value of frequency deviation, which is the stable value of grid frequency after frequency regulation (the smaller its value, the better the outcome); and
Pp is the peak value of the power change in the thermal power units and
Ps is the steady-state value of the power change in the thermal power units (the smaller the absolute values of
Pp and
Ps, the smaller the output of the thermal power units and the better the safety performance of the thermal power units).
From
Figure 7, it can be seen that the frequency deviation of the five control modes is zero before the step load disturbance reaches 1 s, and the flywheel energy storage system does not work; at 1 s, due to the impact of the negative step load disturbance, the grid frequency is disturbed and increased. At this point, the thermal power units and the flywheel energy storage system output negative power to suppress power deterioration. The initial frequency change rate of no energy storage and droop control is larger, the initial frequency change rate of inertia control, comparative literature mode and the mode used in this study is smaller. At around 1.1 s, droop control first reaches its peak; at around 4 s, this study’s mode also reaches the frequency peak, but the absolute value of the frequency peak is significantly lower than other control modes; when the grid frequency is stable, inertia control and no energy storage have a larger steady-state frequency deviation, the comparative literature mode and droop control have a smaller steady-state frequency deviation, and the study’s mode has basically no frequency deviation in the steady state, and the time to reach the steady state is less, only approximately 4.6 s. From
Figure 8, it can be seen that under the control mode of this study, the peak value of the power change in the thermal power units is only about −0.01 MW, its absolute value is significantly smaller than other control modes, the speed to reach the steady state is significantly faster, and at the steady state, the thermal power units basically do not output extra power for frequency regulation, and the operation stability of the thermal power units is good.
Figure 7 and
Figure 8 and
Table 2 show that the frequency deviation peak of this study’s control mode is the smallest, which is 0.00083 p.u., and that it can reduce the steady-state value of frequency deviation to 0, the time spent on frequency regulation only takes about 3.6 s, the power change in the thermal power unit is significantly smaller, and it has good engineering feasibility.
4.2. Allocation of Coefficients
The larger the droop coefficient, inertia coefficient and integral coefficient, the larger the output amplitude of energy storage in grid frequency support, and the better the corresponding frequency regulation effect. The role of each coefficient in the frequency regulation process has been explained in
Section 4.1, and the degree of the role of the above coefficients in each state of frequency regulation is different, so adjusting the above parameters according to different time points can improve the efficiency of frequency regulation and directly increasing the size of all coefficients can improve the effect of frequency regulation, but the energy consumption is higher, which is not conducive to the SOC of flywheel energy storage staying in the normal range.
This study sets the droop coefficient and inertia coefficient in the frequency deviation state to satisfy the following equation:
where,
KA and
g are constants, and both are positive values,
KA is the sum of the droop coefficient and inertia coefficient in the frequency deviation state. The size of
KA is determined by the local load disturbance environment—the larger the load disturbance amplitude, the larger the value of
KA and the value of
g needs to be obtained through experiments for the optimal value.
From Equations (14) and (15), it can be elucidated that in the parameter allocation of the frequency deviation state, the larger the frequency change rate, the larger the inertia coefficient; the reason for this is that, in the early stage of load disturbance, the inertia control needs to maximize the suppression of the deviation rate of frequency; after the load disturbance, the grid frequency gradually approaches the peak, and the change rate gradually decreases. At this time, the role of inertia control also gradually decreases, and the droop coefficient gradually increases, and the droop control role is strengthened, which makes the flywheel energy storage enter the frequency recovery state faster.
This study sets the integral coefficient and droop coefficient in the frequency recovery state to satisfy the following equation:
where
KB,
p, and
d are constants and positive values,
KB is the sum of the droop coefficient and integral coefficient in the frequency deviation state. The larger the local load disturbance amplitude, the larger the value of
KB, and the smaller the value of
d, the value of
p needs to be obtained through experiments to obtain the optimal value.
From Equations (16) and (17), it can be established that in the frequency recovery state, the larger the absolute value of frequency deviation, the larger the droop coefficient, which can maximize the role of droop control and quickly reduce the frequency deviation. Then, the role of droop control is gradually reduced, enhancing the role of integral control, and the steady-state frequency deviation is reduced. In Equation (16), the maximum value of is limited to prevent the frequency deviation from being small; if continues to increase, it will cause the frequency deviation to cross zero, causing the integral control to clear and the frequency deviation oscillation phenomenon under continuous disturbance.
When this coefficient configuration mode is adopted, the sum of parameters under different states is a constant, thereby preventing the power output of energy storage from being too large. In the early stage of frequency deviation, the rate of change in grid frequency is large and the frequency deviation is small. The energy output corresponding to inertia control is large. At this time, is large and is small. According to Equation (12), the amplitude of energy storage output increases and the rate of frequency change is greatly suppressed. In the later stage of frequency deviation, the rate of change in grid frequency is small and the frequency deviation is large. Inertia control hardly plays a role, and the energy output corresponding to droop control is large. At this time, is large and is small. According to Equation (12), the amplitude of energy storage output increases and the frequency deviation is greatly suppressed. When the effect of inertia control is weak, it transitions to the frequency recovery state. In the early stage of frequency recovery, the energy output corresponding to droop control is large, is large, and is small. According to Equation (13), the amplitude of energy storage output increases and continues to suppress frequency deviation. In the later stage of frequency recovery, the frequency deviation is small, and droop control can hardly play a role. However, under inertia control, the energy storage output continues to increase. is small and is large. According to Equation (13), the amplitude of energy storage output increases, making the frequency return to normal level.
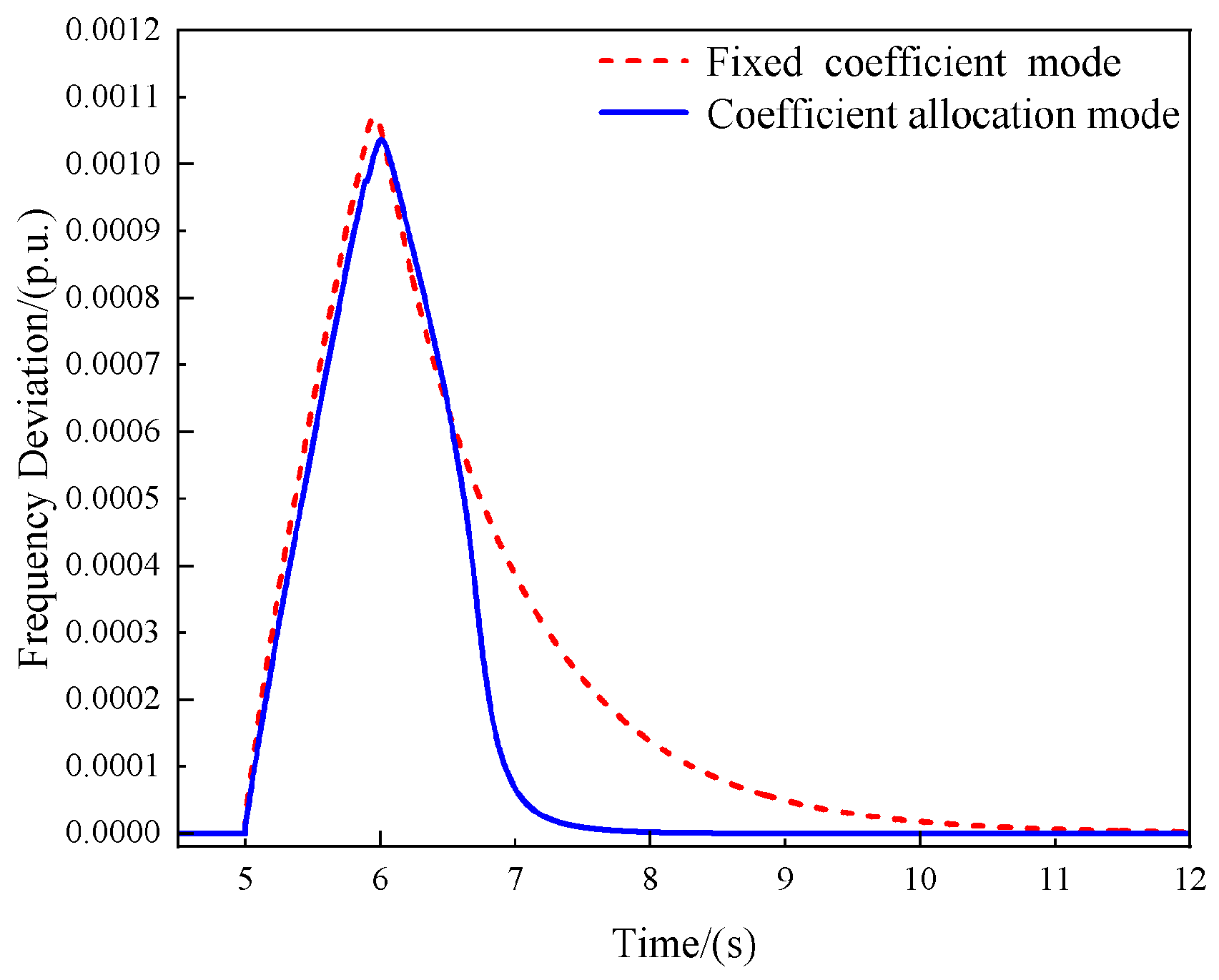
The mode switching threshold is set as a constant, and the tie-line power of other regions is not considered; the energy storage control mode with coefficient allocation is compared with the energy storage control mode with fixed coefficients under the step load disturbance (apply −0.05 p.u. at 5 s), as shown in
Figure 9 (
KA and
KB are both 120,
d is 0.71, and the control coefficients of each control mode of the energy storage control mode with fixed coefficients are all 60).
From
Figure 9, it can be seen that after adopting the coefficient allocation mode, the deviation rate and deviation peak of frequency in the frequency deviation state are reduced; the time spent on frequency regulation is significantly reduced, among which the coefficient fixed mode frequency regulation takes about 7 s, while the coefficient allocation mode frequency regulation only takes about 2.7 s to stabilize the frequency deviation at 0 p.u. In the process of grid frequency regulation, the coefficient allocation mode can improve the frequency regulation performance, and the control mode with integral control participating in the frequency recovery stage has a strong recovery effect, which has a certain guiding significance for engineering applications.
4.3. Mode Switching Method
Most of the current literature considers the switching between energy storage control modes when studying energy storage-assisting grid frequency support. They usually use a threshold as a constant to simply switch the control mode. For example, in frequency regulation in Reference [
9], it first judges whether Δ
f is greater than or less than the frequency deviation threshold, and then judges whether
dΔ
f is greater than or less than 0 to switch the energy storage control mode. However, the switching point of the energy storage control mode has a significant impact on the actual frequency regulation effect. At present, no method in the literature can obtain the best frequency regulation effect under all load disturbance conditions based on the size of Δ
f or
dΔ
f/
dt. This section first determines the control mode switching through the size relationship between
dΔ
f/
dt and the mode switching threshold
t0 (the specific switching method has been explained in
Section 4.1) and then changes
t0 to observe the impact of the size of the mode switching threshold on the frequency regulation effect; finally, a better mode switching method is proposed and verified.
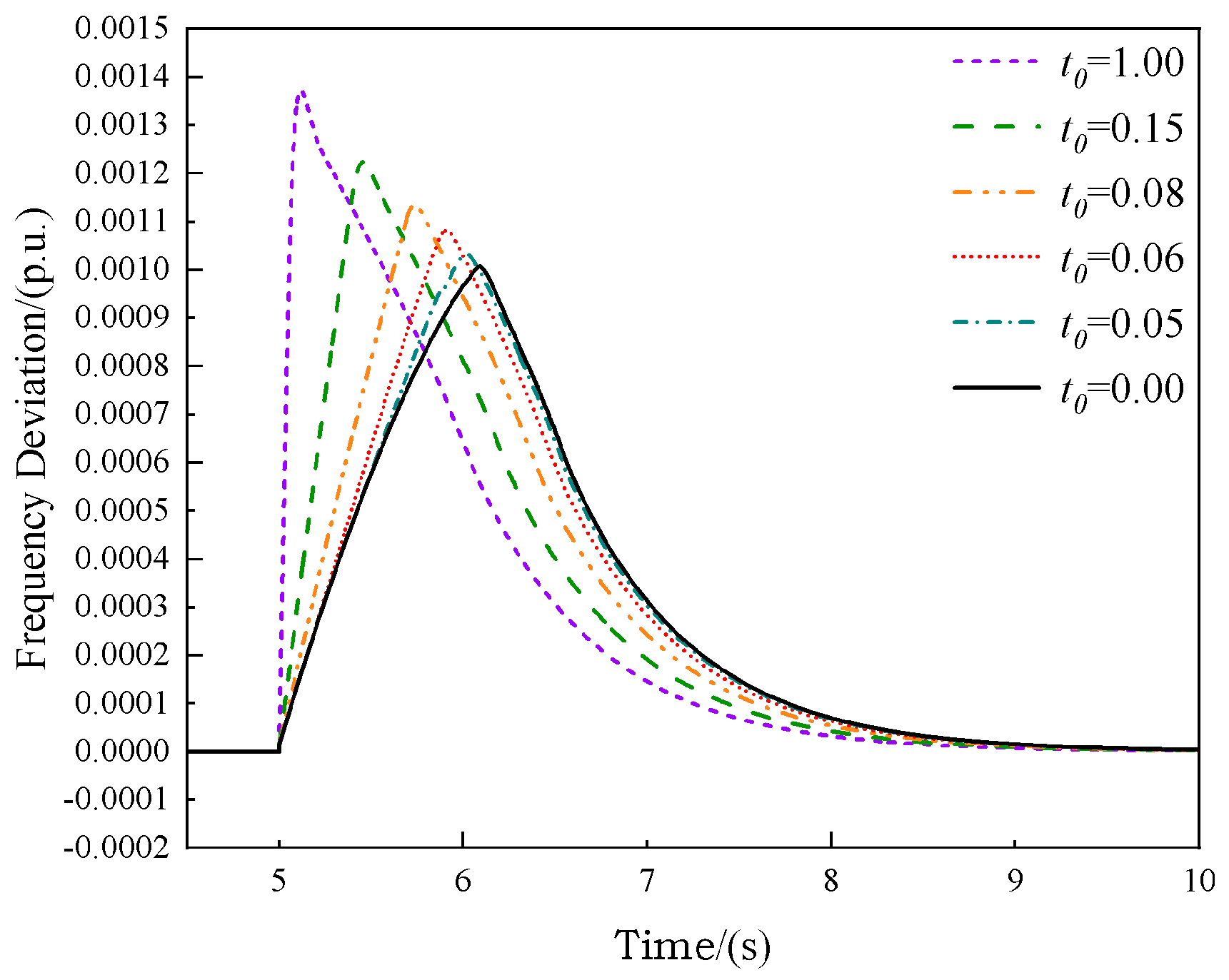
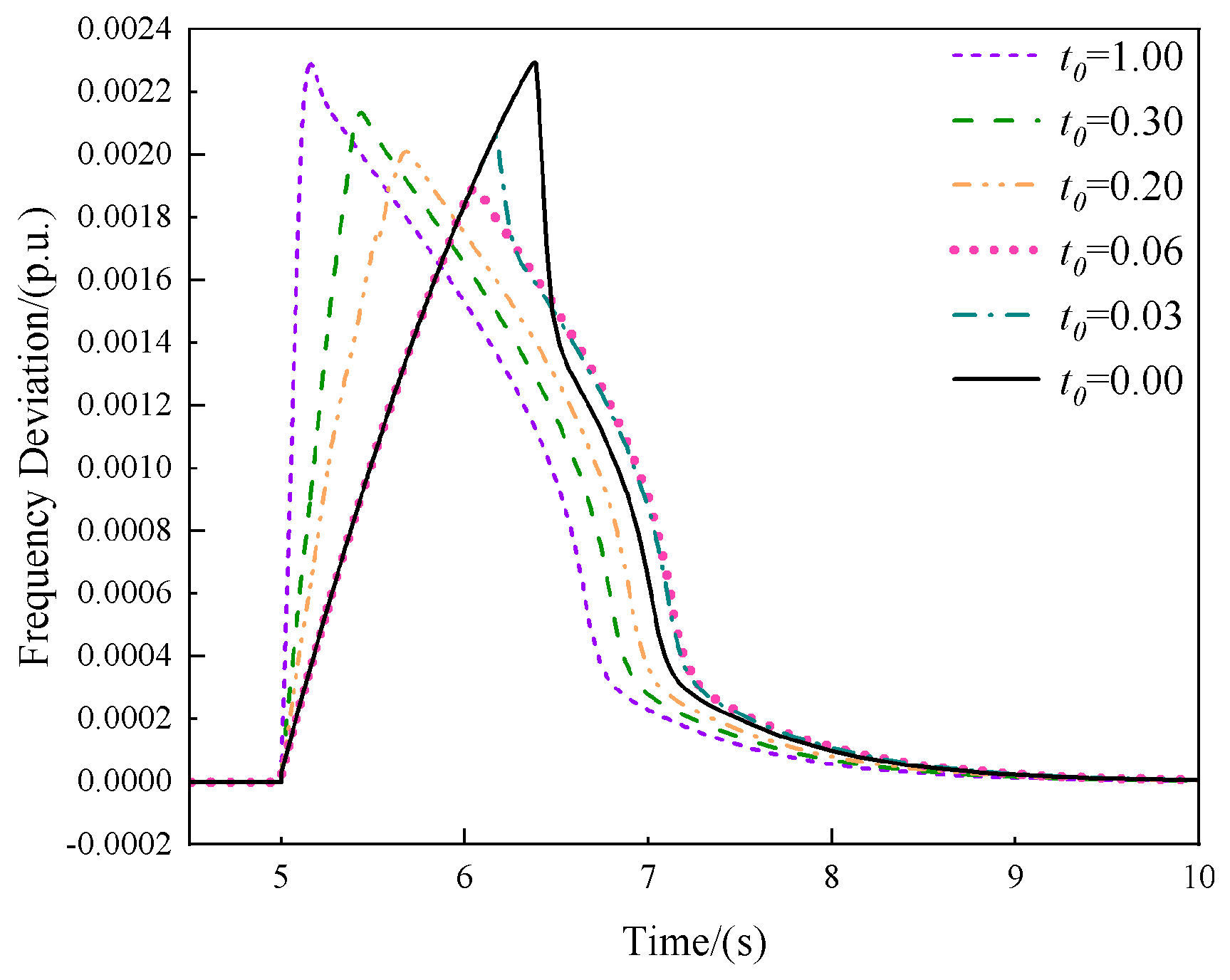
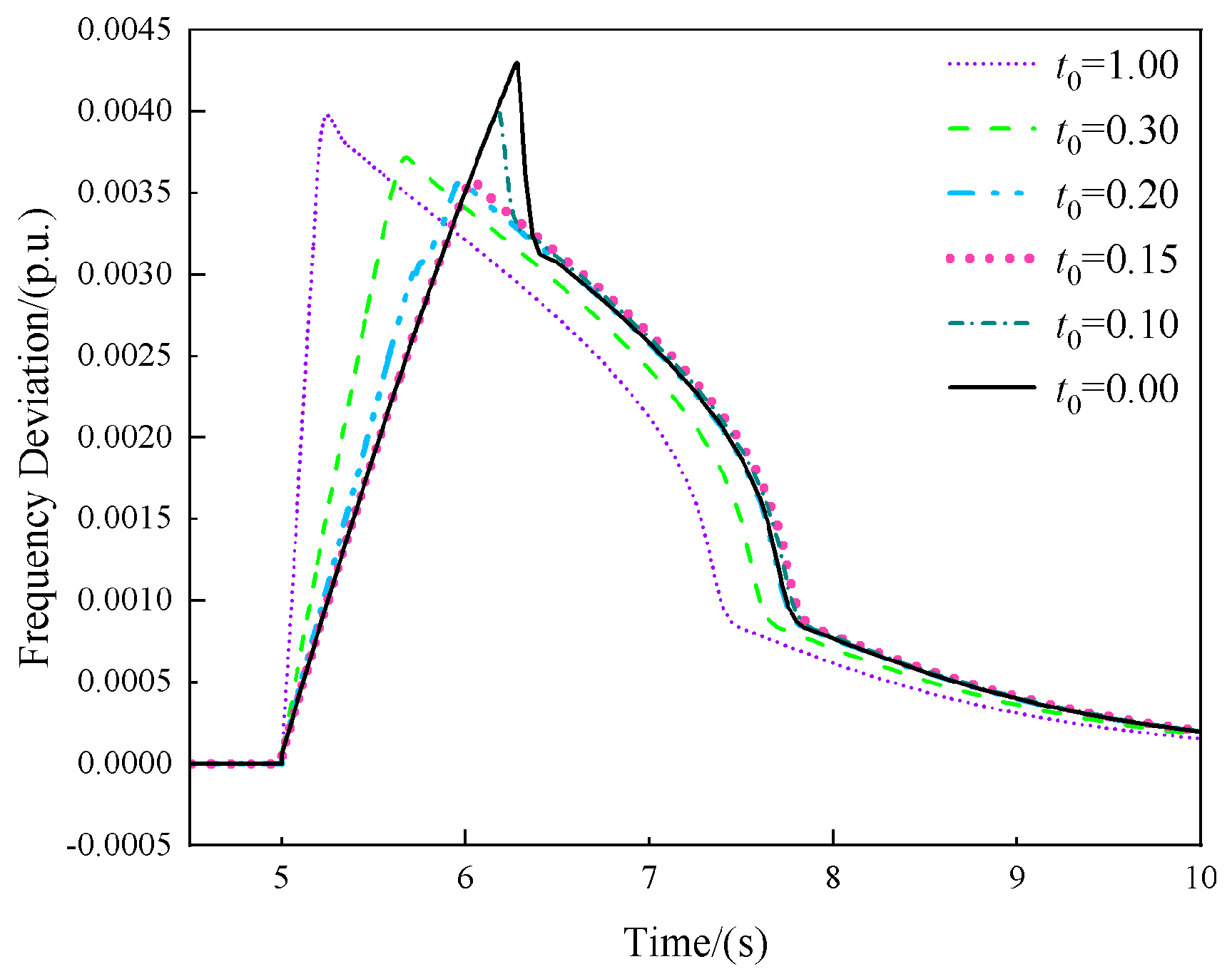
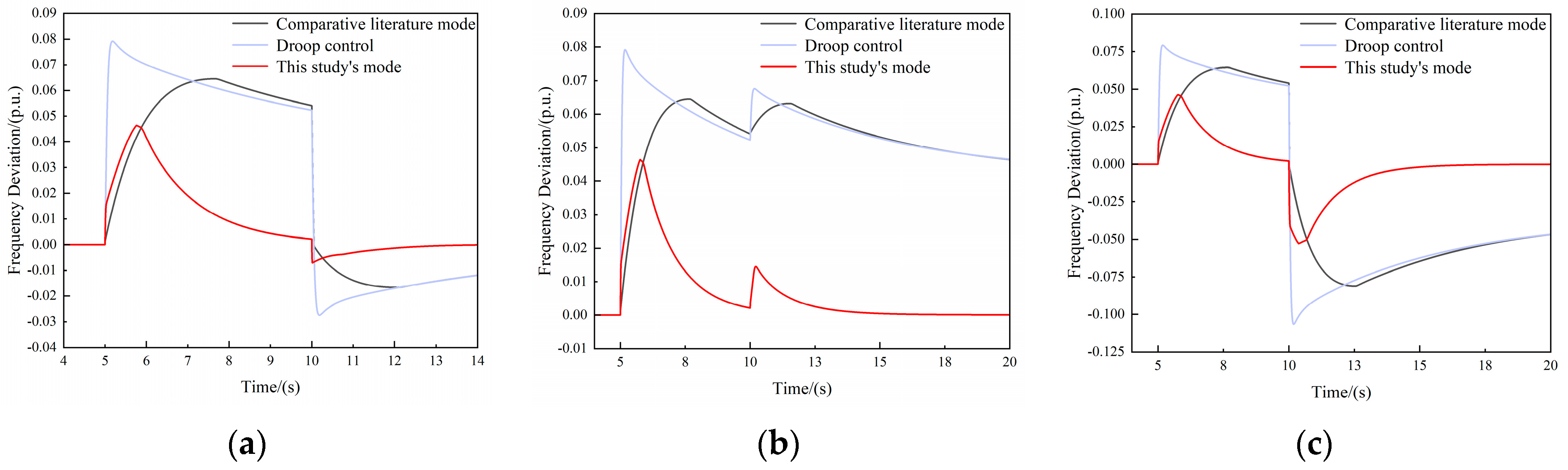
Without considering the tie-line power of other regions, using different mode switching thresholds, under different degrees of step load disturbance (all apply negative disturbance at 5 s), the frequency deviation curve is observed, as shown in
Figure 10,
Figure 11 and
Figure 12.
From
Figure 10,
Figure 11 and
Figure 12, it can be seen that under different degrees of step disturbance, the size of the mode switching threshold has a significant impact on the frequency regulation result.
t0 = 0.00 is the mode switching method adopted by most of the current literature. When the step disturbance is −0.05 p.u.,
t0 = 0.00 is the switching method with the smallest frequency deviation peak. However, when the step disturbance is −0.1 p.u. or −0.2 p.u., it becomes the switching method with the largest frequency deviation peak. Therefore, comparing
dΔ
f/
dt with the fixed value of
t0 to switch the mode cannot obtain the best frequency regulation effect under all disturbances. When
t0 = 1.00, the energy storage has entered the frequency recovery phase as soon as the step disturbance occurs, and the droop + integral mixed mode is used throughout the process. The frequency deviation changes quickly, but the frequency deviation peak is large. The
t0 values corresponding to the smallest frequency deviation peak in
Figure 10,
Figure 11, and
Figure 12 are approximately 0.00, 0.06, and 0.15, respectively. By applying a larger amplitude of load disturbance, it is found that the
t0 corresponding to the smallest frequency deviation peak when the frequency deviation peak is the smallest is larger. Therefore, as the amplitude of the load disturbance increases, the
t0 corresponding to the smallest frequency deviation peak is larger.
The reason for the above results mainly lies in the size relationship of the energy storage output corresponding to the two mixed modes. For example, in
Figure 11, when
t0 is between 0.2 and 1.0, the droop + integral mixed mode quickly switches to the inertia + droop mixed mode. At this time, the energy storage output corresponding to the droop + integral mixed mode is larger, and the energy storage output corresponding to the inertia + droop mixed mode is smaller, so the suppression effect on the frequency after switching is weaker. When the size of
t0 is approximately 0.06, the energy storage output power of the inertia + droop mixed mode and the droop + integral mixed mode at the switching point is basically the same. According to Equations (9), (12), and (13), the effect of inertia control will weaken later, and the effect of integral control will strengthen, so switching the control mode at this time will provide a greater frequency suppression effect. The characteristic of switching the time point too early is that the frequency deviation will still increase after switching the control mode, and switching the time point too late will cause the frequency deviation peak to be too large. In addition, as the amplitude of the load disturbance increases, the speed of the integral control effect will increase, so the best switching time point will advance.
There are many indicator parameters for grid frequency regulation. In order to reduce the difficulty of analysis, this study mainly considers the frequency deviation peak when considering the mode switching method. Other indicator parameters will be considered comprehensively in subsequent research by sacrificing a certain frequency deviation peak. When considering the switching point of the energy storage control mode, this study will adopt the switching mode as shown in
Figure 13. In the frequency deviation state, due to the larger frequency increase rate in a short time after the load disturbance, the absolute value of the energy storage command power corresponding to the inertia + droop mixed mode is larger. The frequency offset is smaller in a short time and the integral quantity is smaller, so the absolute value of the energy storage command power of the droop + integral mixed mode is lower. After a certain period of time, the frequency offset and integral quantity are large enough, and the frequency increase rate gradually decreases. At this time, the absolute value of the energy storage command power of the droop + integral mixed mode will be greater than the absolute value of the energy storage command power of the inertia + droop mixed mode. In terms of the ability to suppress frequency deterioration, the droop + integral mixed mode is stronger, so it switches to the droop + integral mixed mode at this time and enters the frequency recovery state, and the frequency regulation effect is better.
Due to the different energy storage control modes used in Reference [
9] compared to this study, it is inconvenient to compare the mode switching methods. Therefore, only some parts of the switching points in Reference [
9] that are most suitable for the mode of this study are selected as a reference for comparison (the frequency deviation threshold Δ
fp is taken as the per unit value 0.001, if |Δ
f| < Δ
fp and
df·Δ
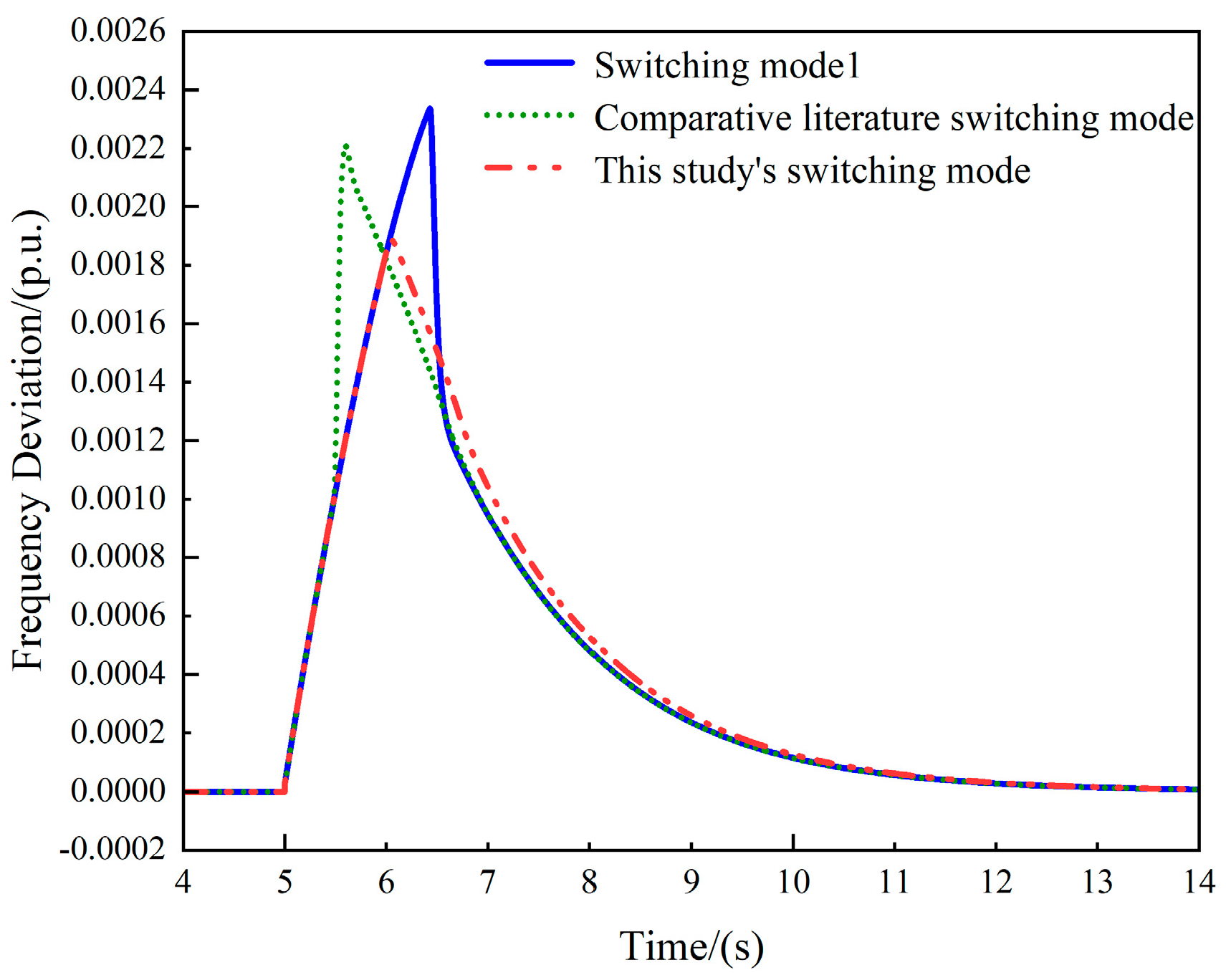
f > 0, it is considered to be in the frequency deviation state, and in other cases, it is in the frequency recovery state, which is referred to as the comparison literature switching mode in the following text). This study’s switching mode, the comparative literature switching mode, and the fixed mode switching threshold of
t0 = 0 (referred to as switching mode 1 in the following text) are compared. A step load disturbance of −0.1 p.u. is applied at 5 s, and the resulting frequency deviation is shown in
Figure 14.
It can be seen that both switching mode 1 and the comparative literature switching mode cannot achieve good frequency regulation of the grid. The comparative literature switching mode switches modes at an earlier point, but at this time, the inertia + droop mixed control has not fully exerted its effect of suppressing the frequency change rate, causing the frequency change rate to suddenly increase and then causing a larger frequency deviation peak; switching mode 1 switches modes at a later point, and the frequency deviation state time is too long, also causing a larger frequency deviation peak; this study’s switching mode switches frequency at about 6 s, and by this time, the inertia + droop mixed control has suppressed the frequency change rate to a certain level, and the instruction power of the droop + integral mixed control is enough to have a good recovery effect in the frequency recovery stage. The frequency deviation peak of this study’s switching mode only reaches 0.0019 p.u.; therefore, this study’s switching mode can optimize the performance of grid frequency regulation and reduce the frequency change amplitude caused by load disturbance.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}