
Understanding Pedestrian Cognition Workload in Traffic Environments Using Virtual Reality and Electroencephalography

 , ,
, ,  , and
, and 
Abstract
1. Introduction
1.1. Virtual Reality for Pedestrian Safety
1.2. Neurophysiology Approaches for Pedestrian Safety
1.3. Integrating VR and EEG for Pedestrian Safety
2. Materials and Methods
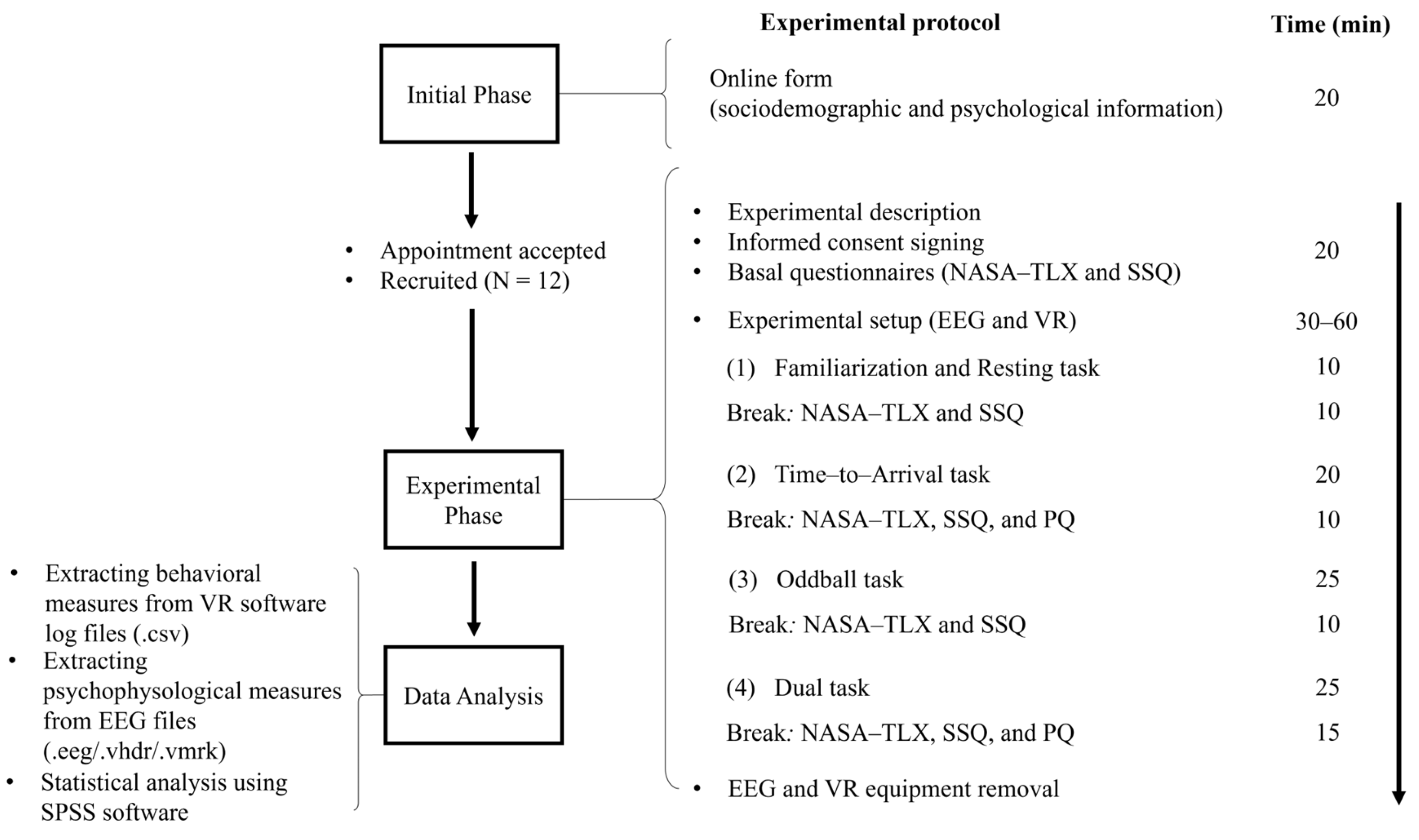
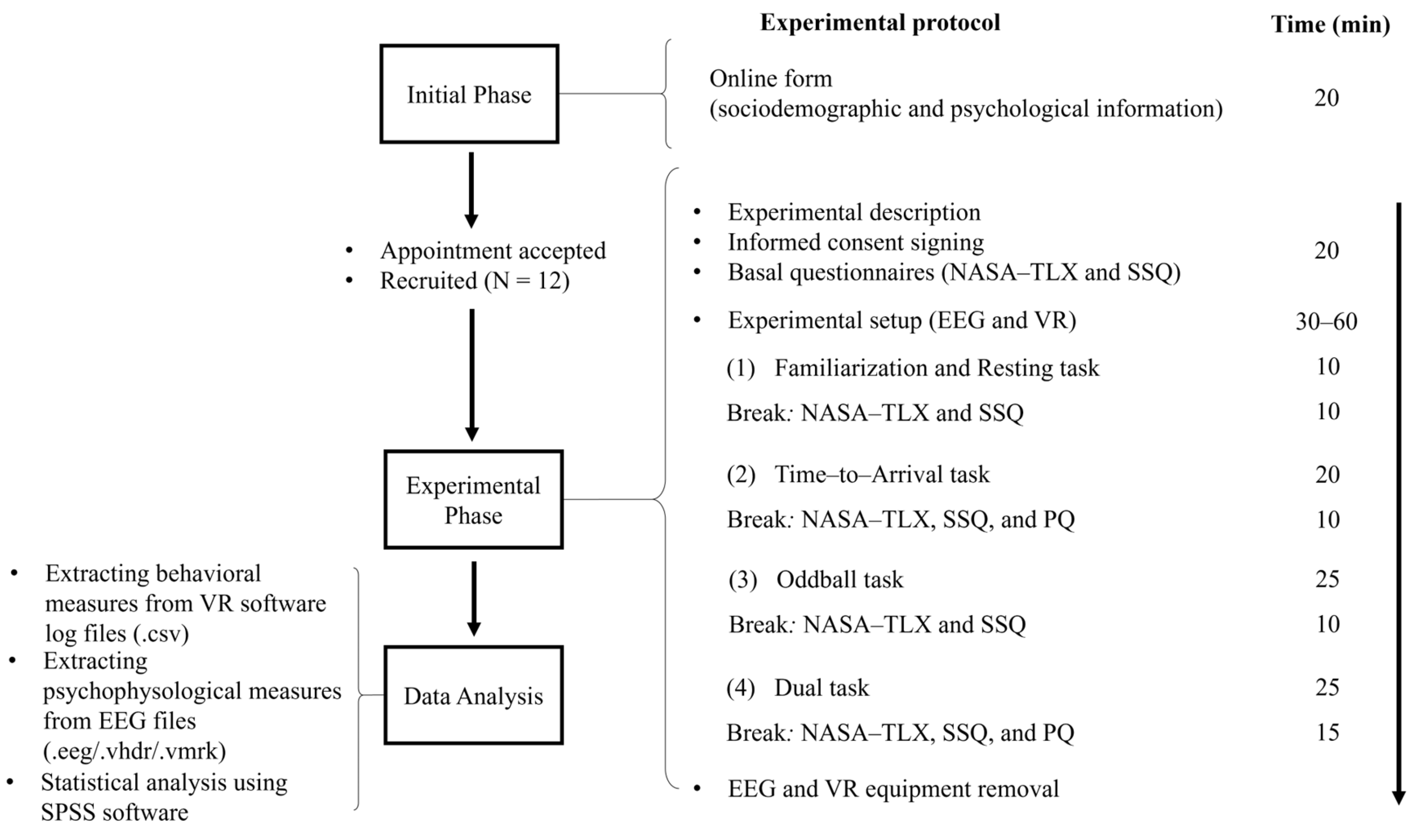
2.1. Study Design and Experimental Protocol
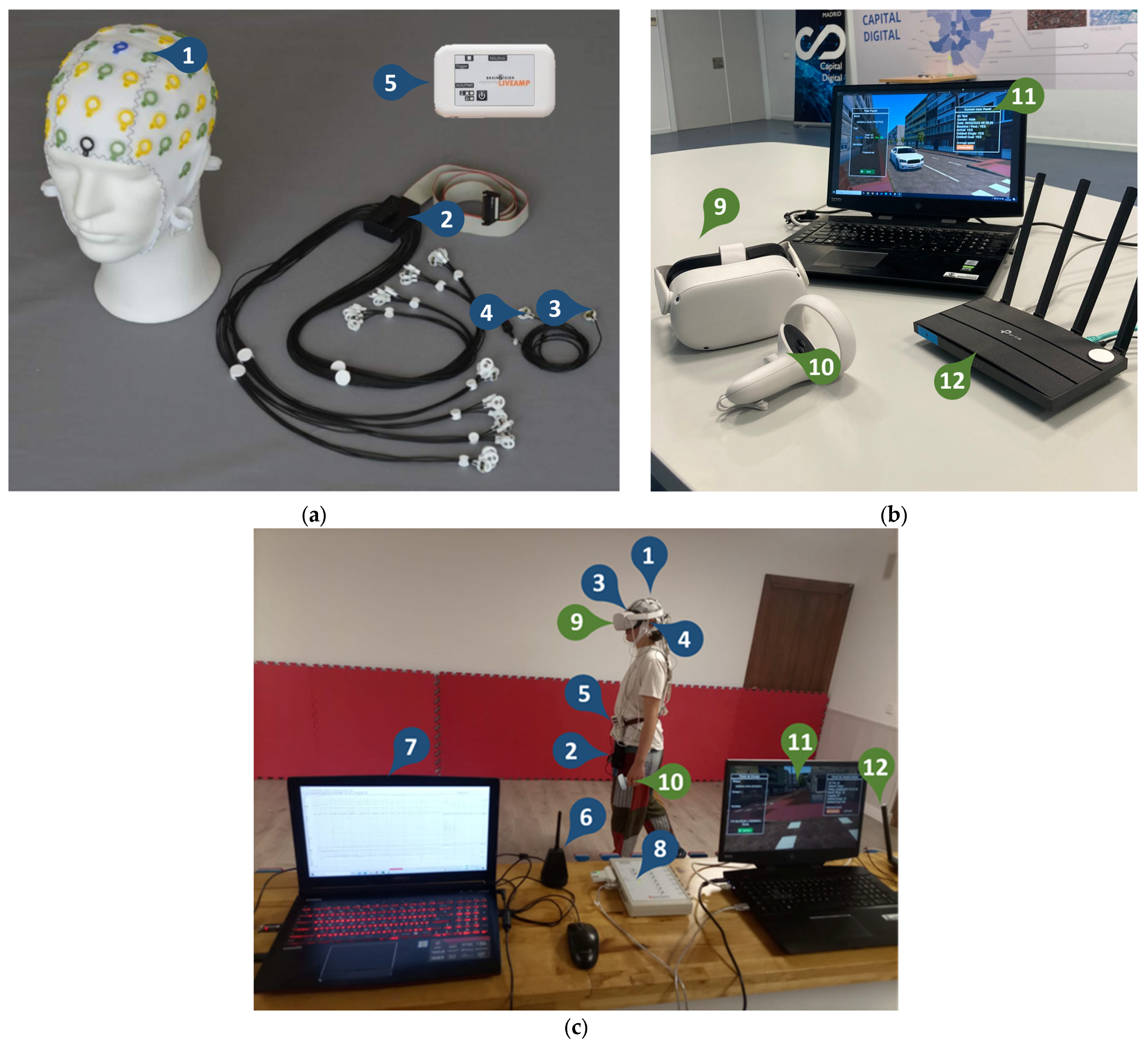
2.2. EEG and VR Equipment
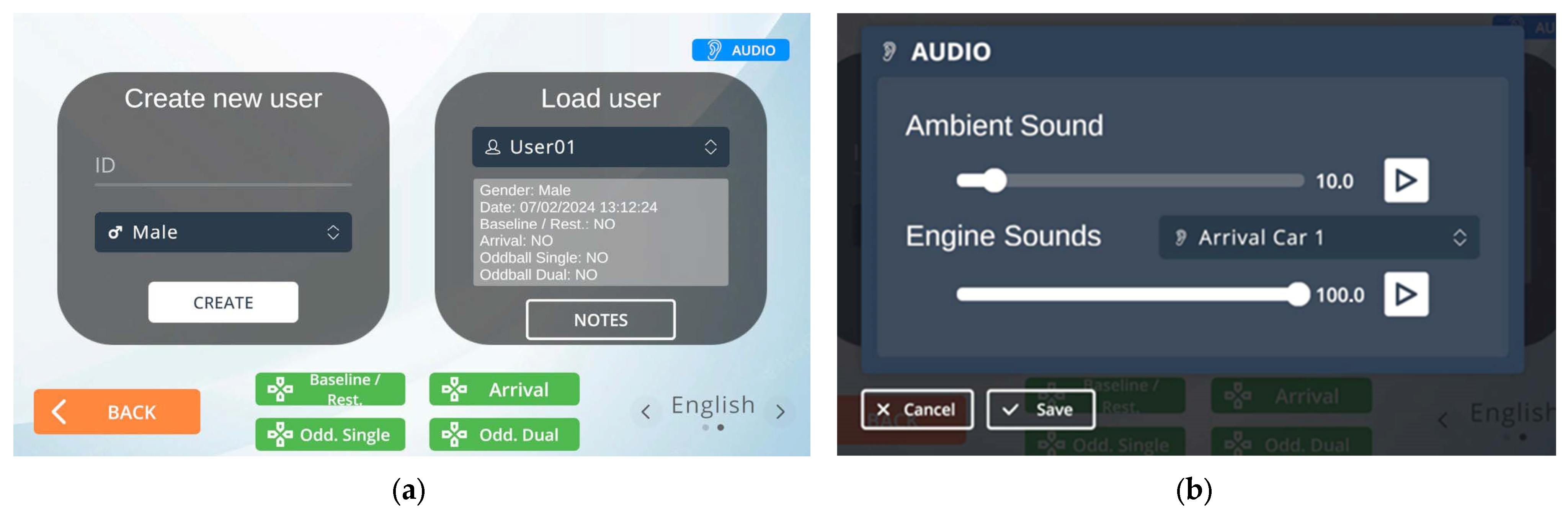
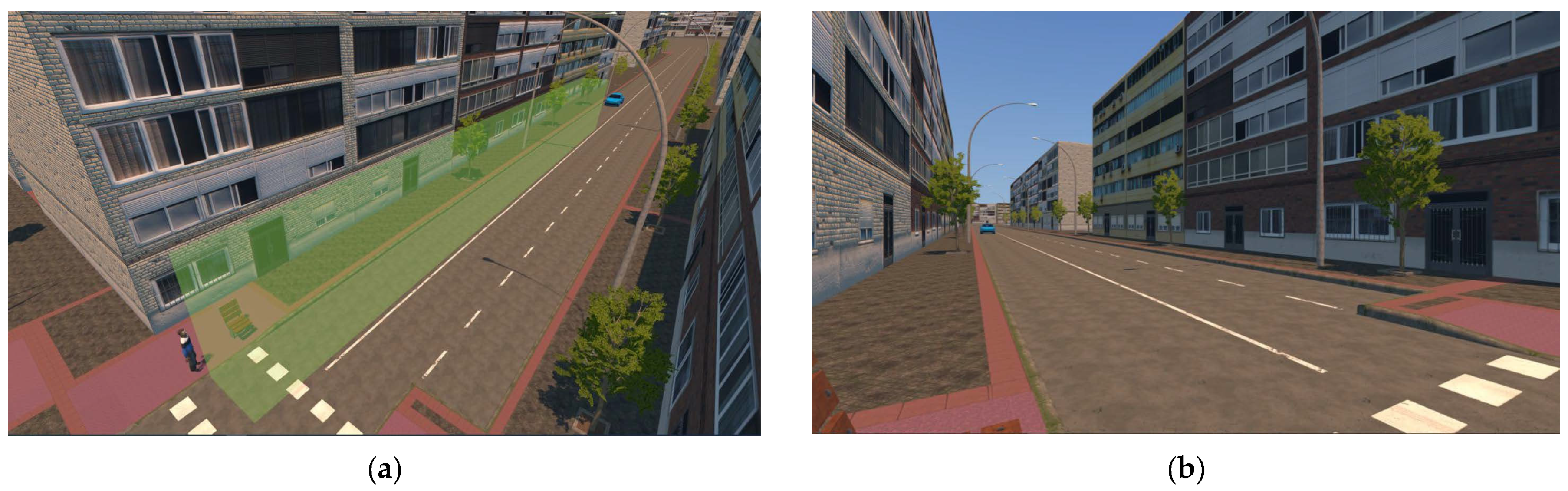
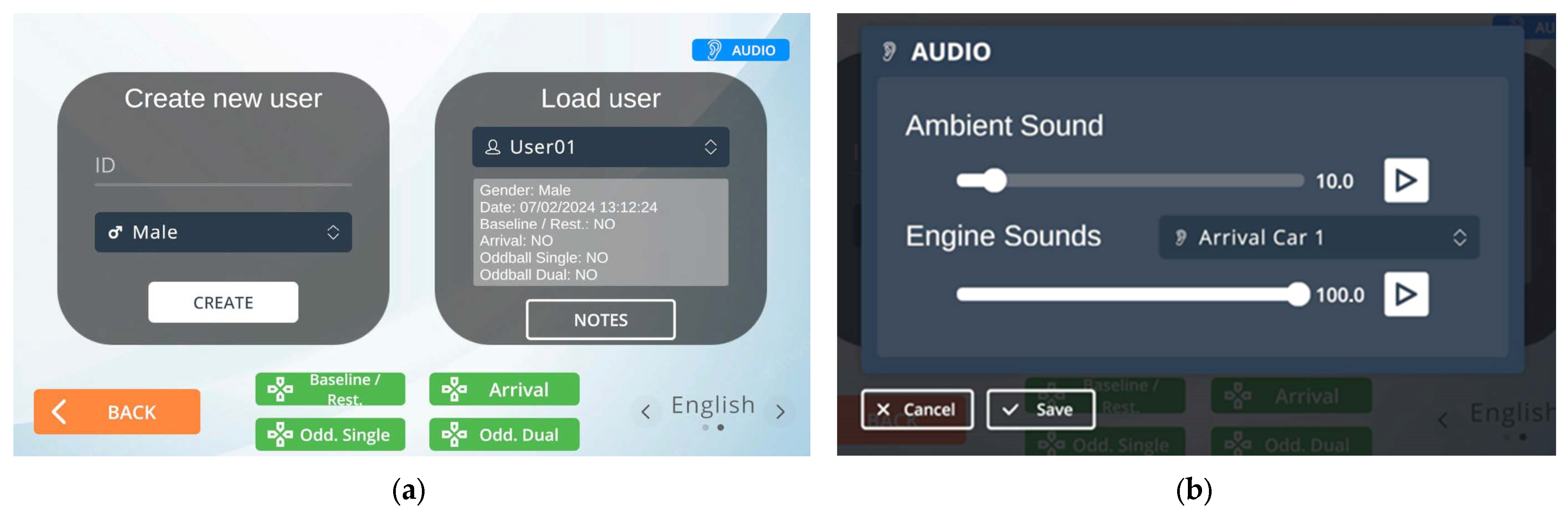
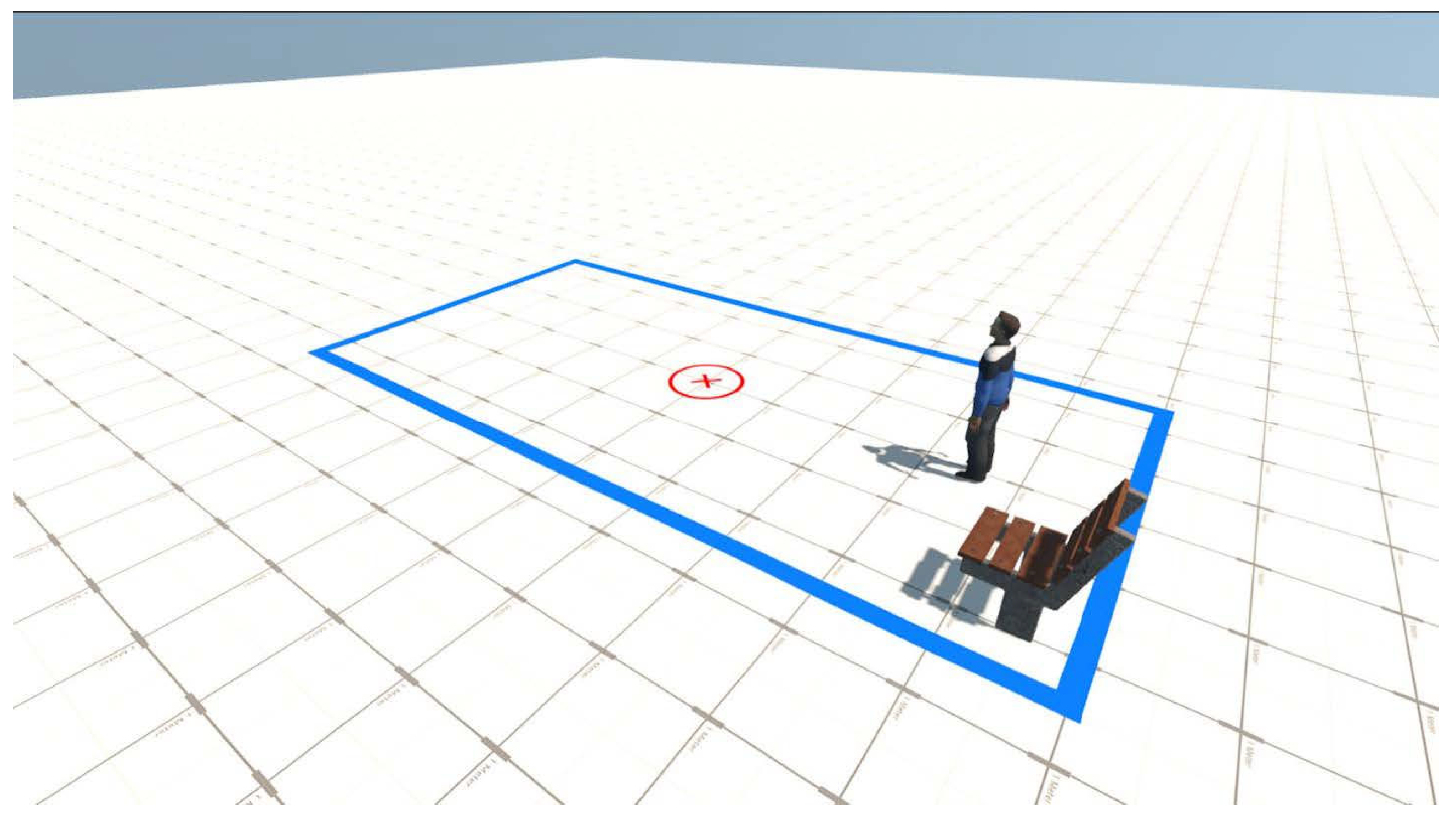
2.3. Virtual Reality Application
2.4. Pedestrian Performance Assessment Based on Behavioral Response
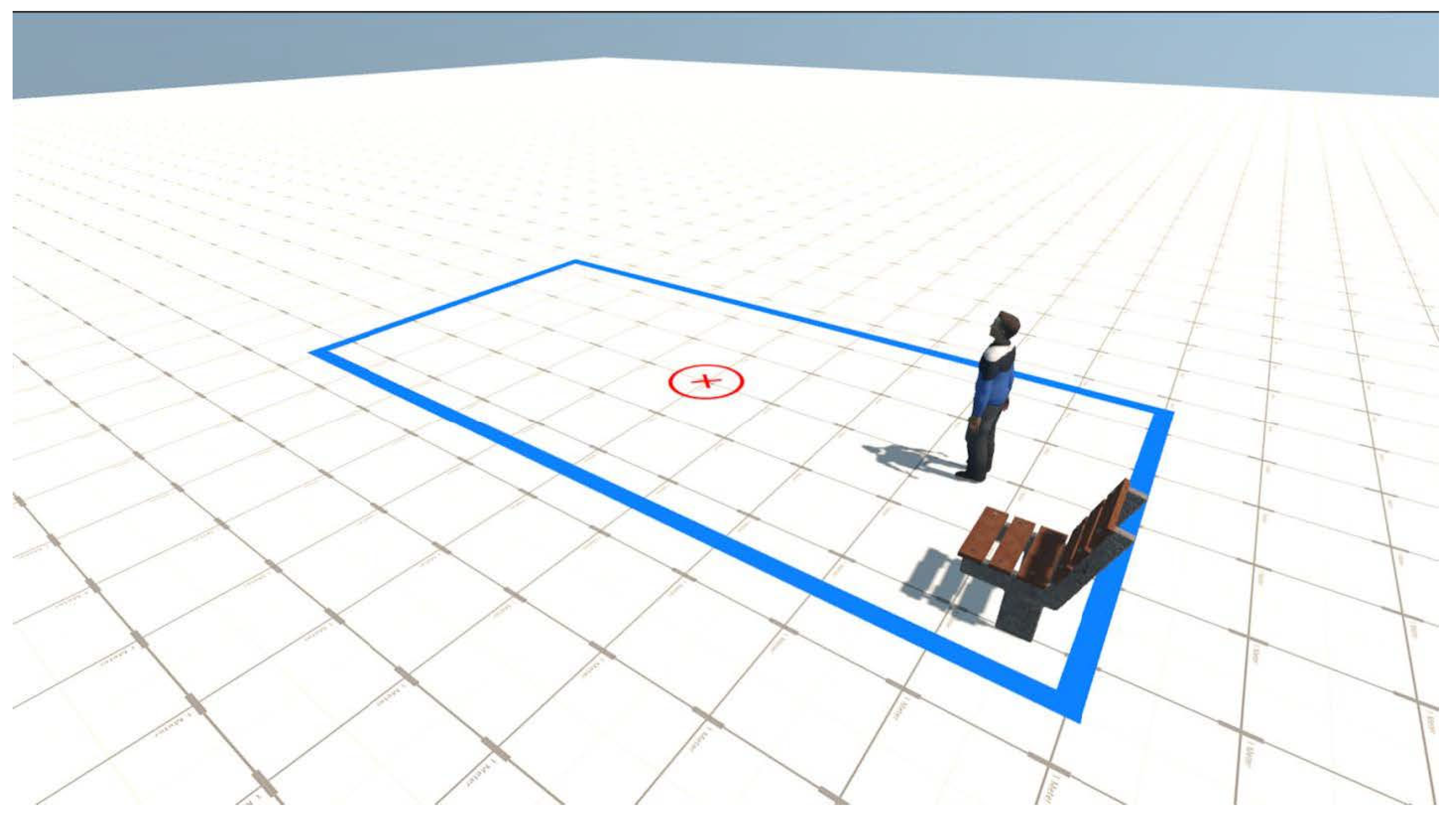
2.4.1. Familiarization and Resting
2.4.2. Time-to-Arrival (TTA) Estimation
2.4.3. Oddball Task
2.4.4. Dual Task
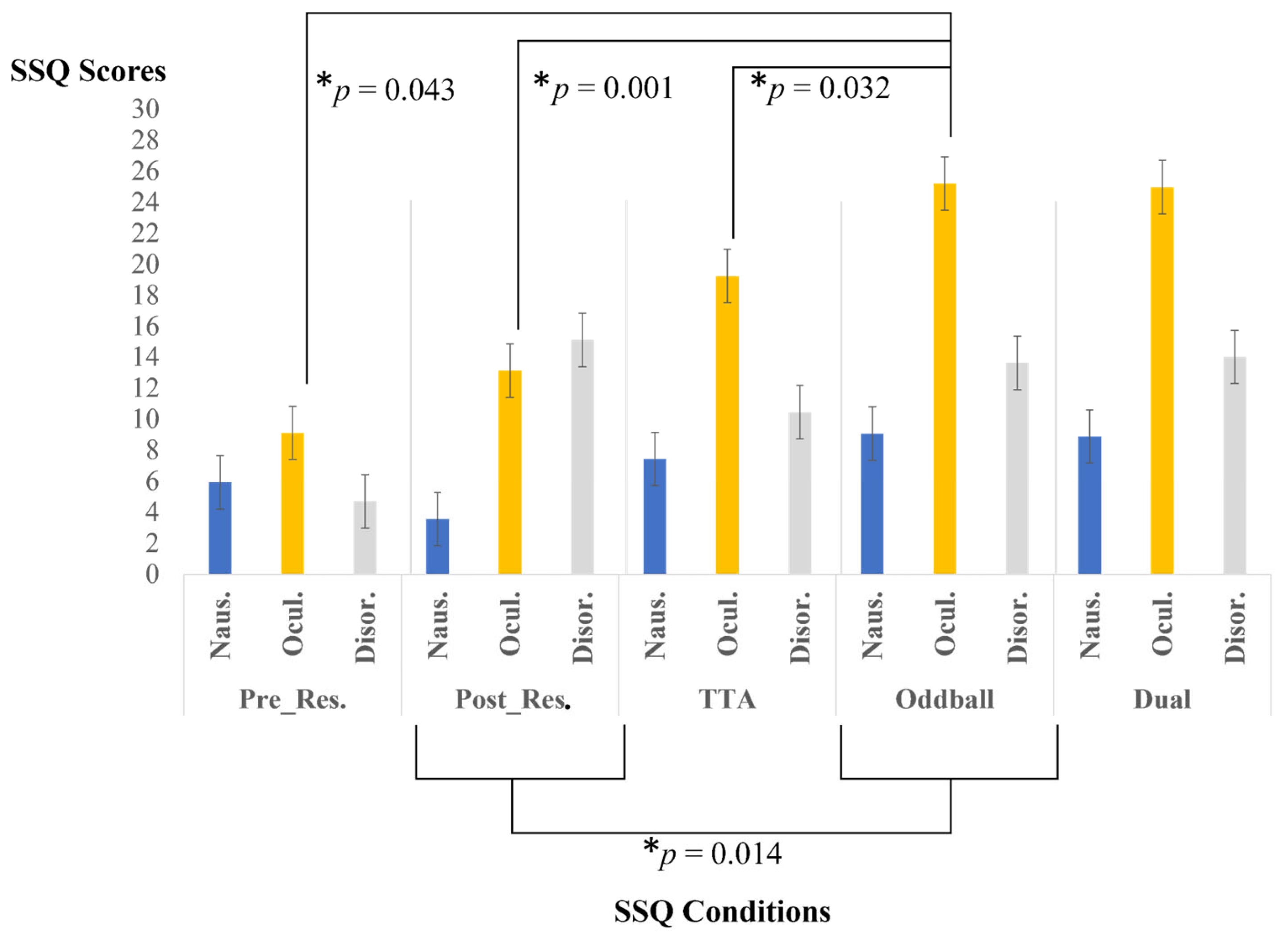
2.5. Workload and Cybersickness
3. Results
3.1. Participants
3.2. Data Analysis
3.2.1. Software
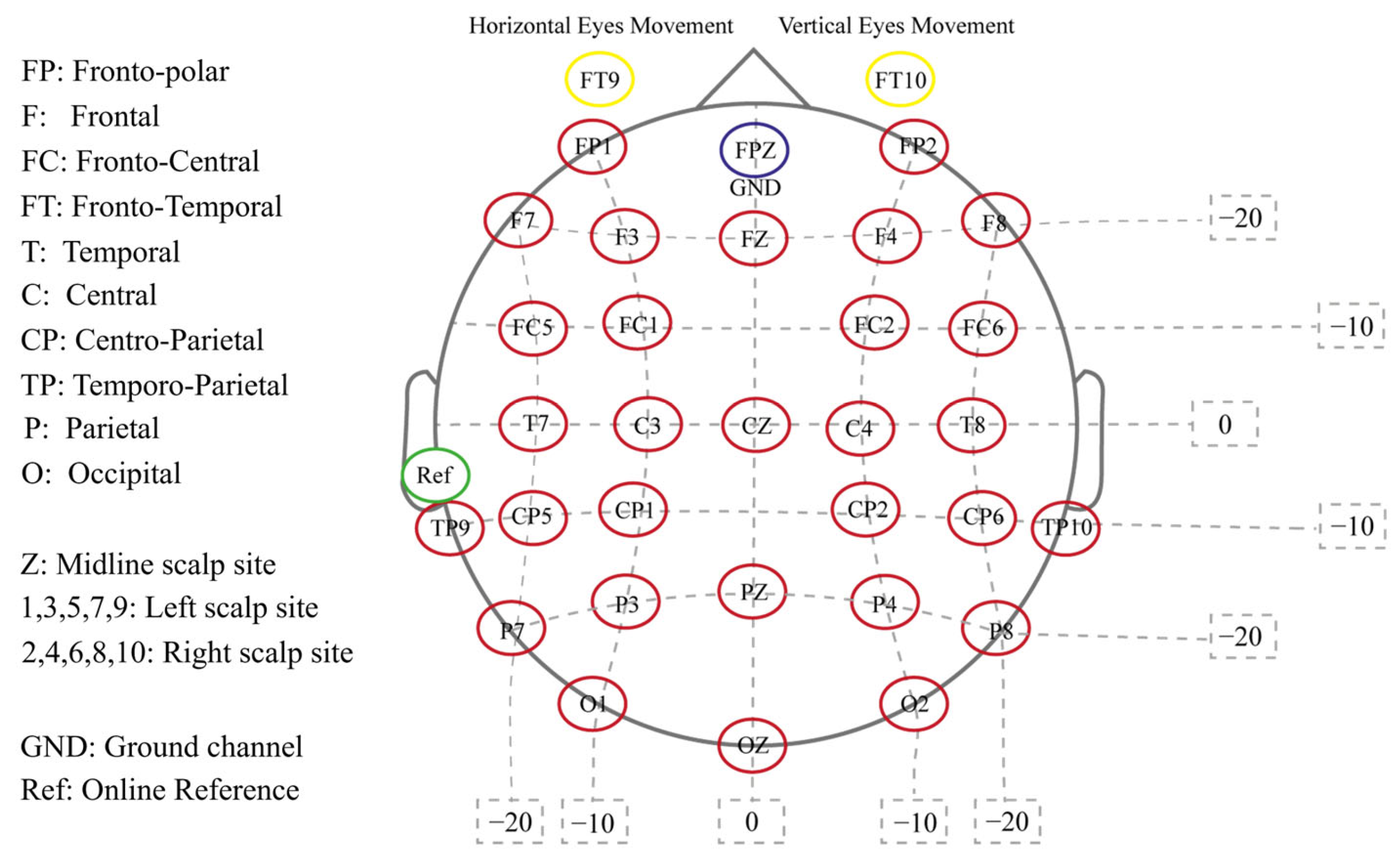
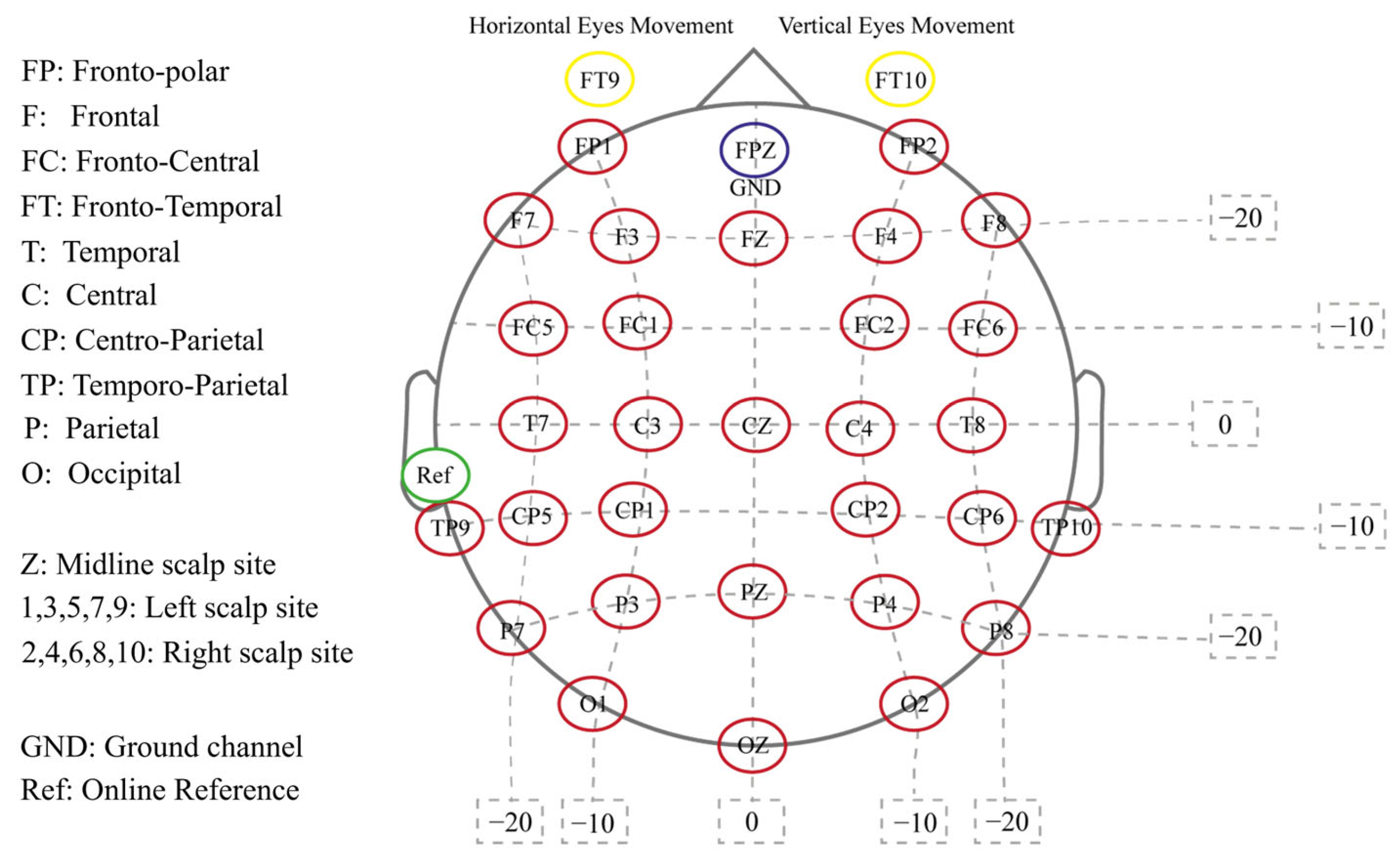
3.2.2. Selection of Electrode Signals
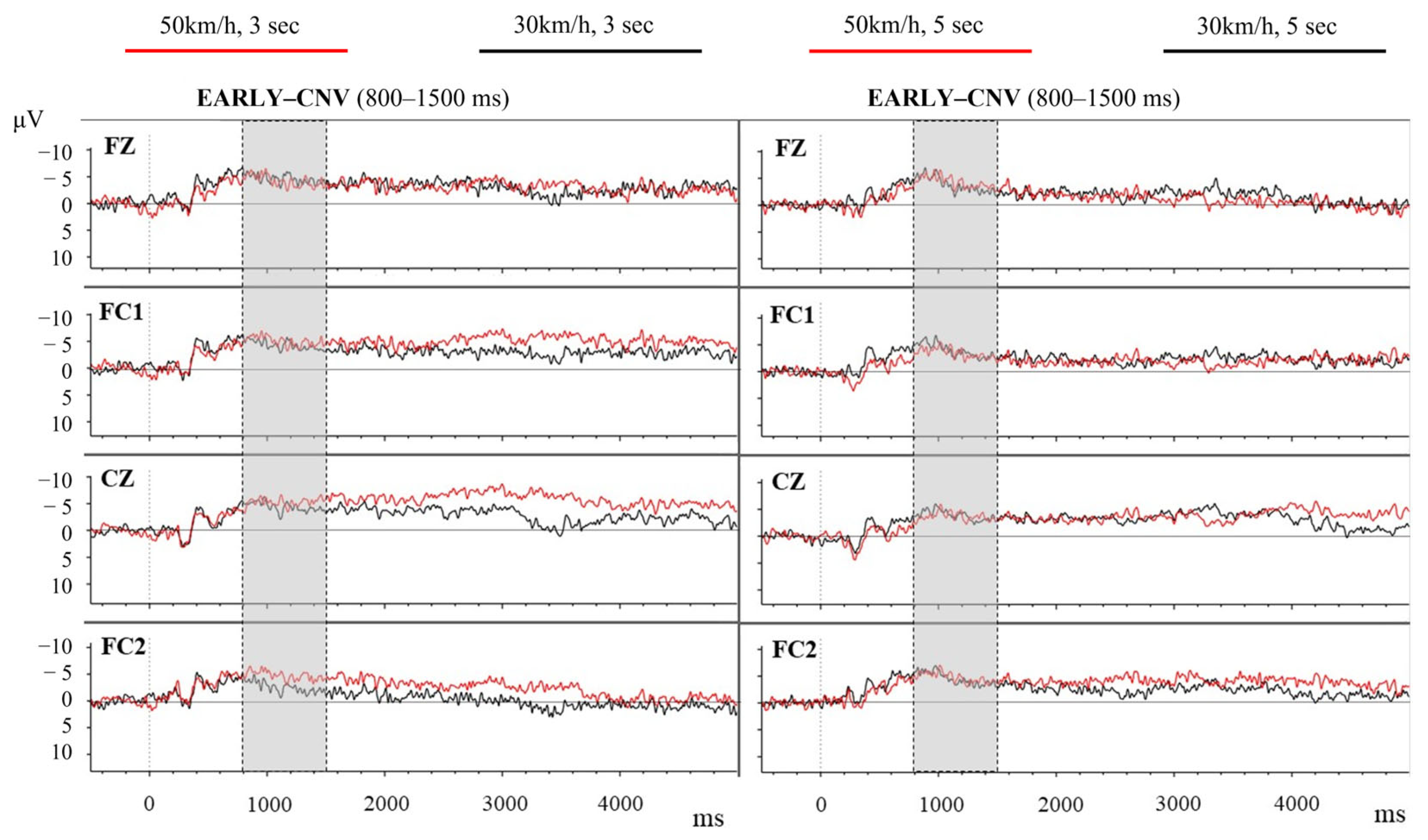
3.2.3. TTA Estimation
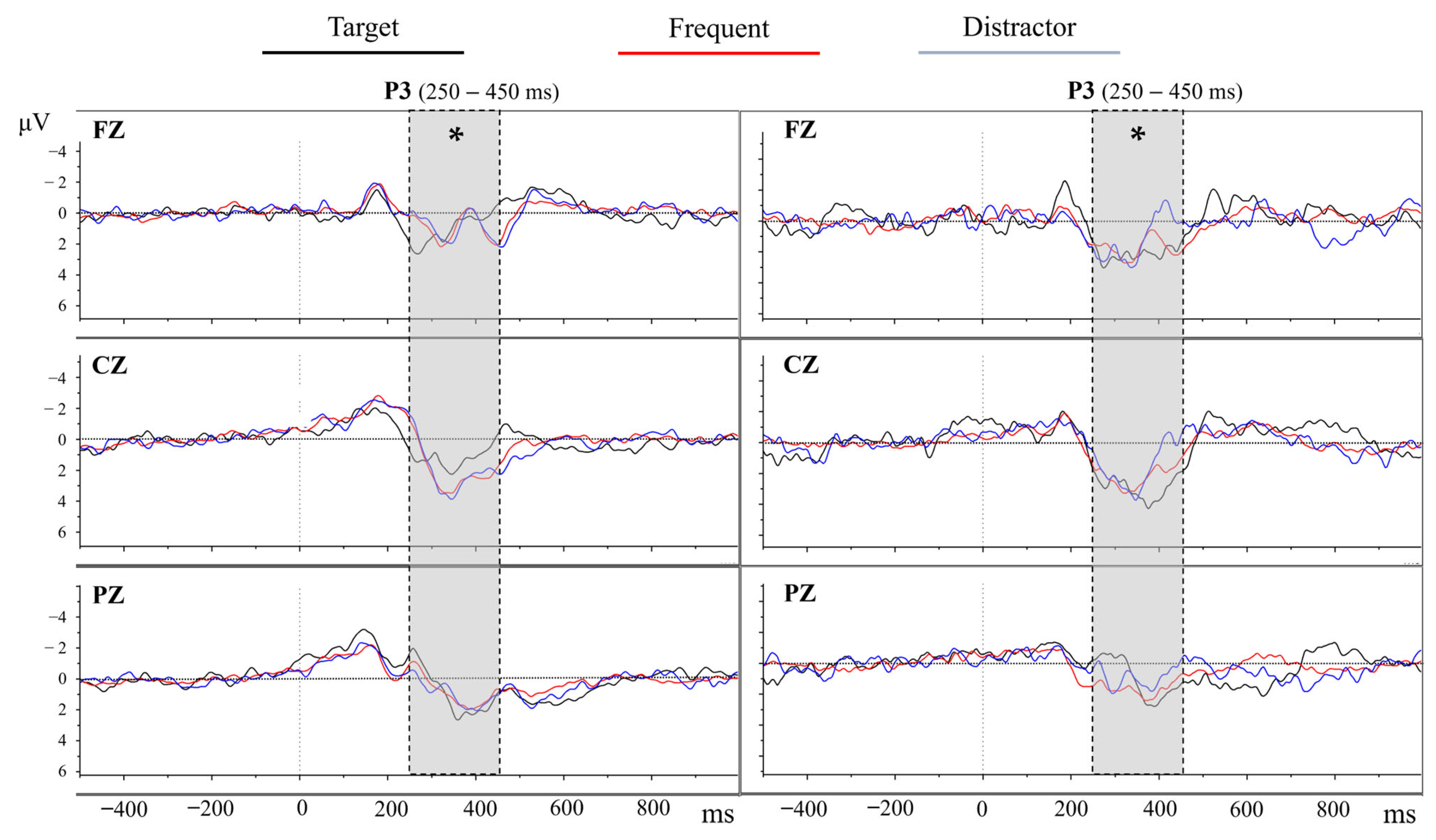
3.2.4. Oddball and Dual Tasks
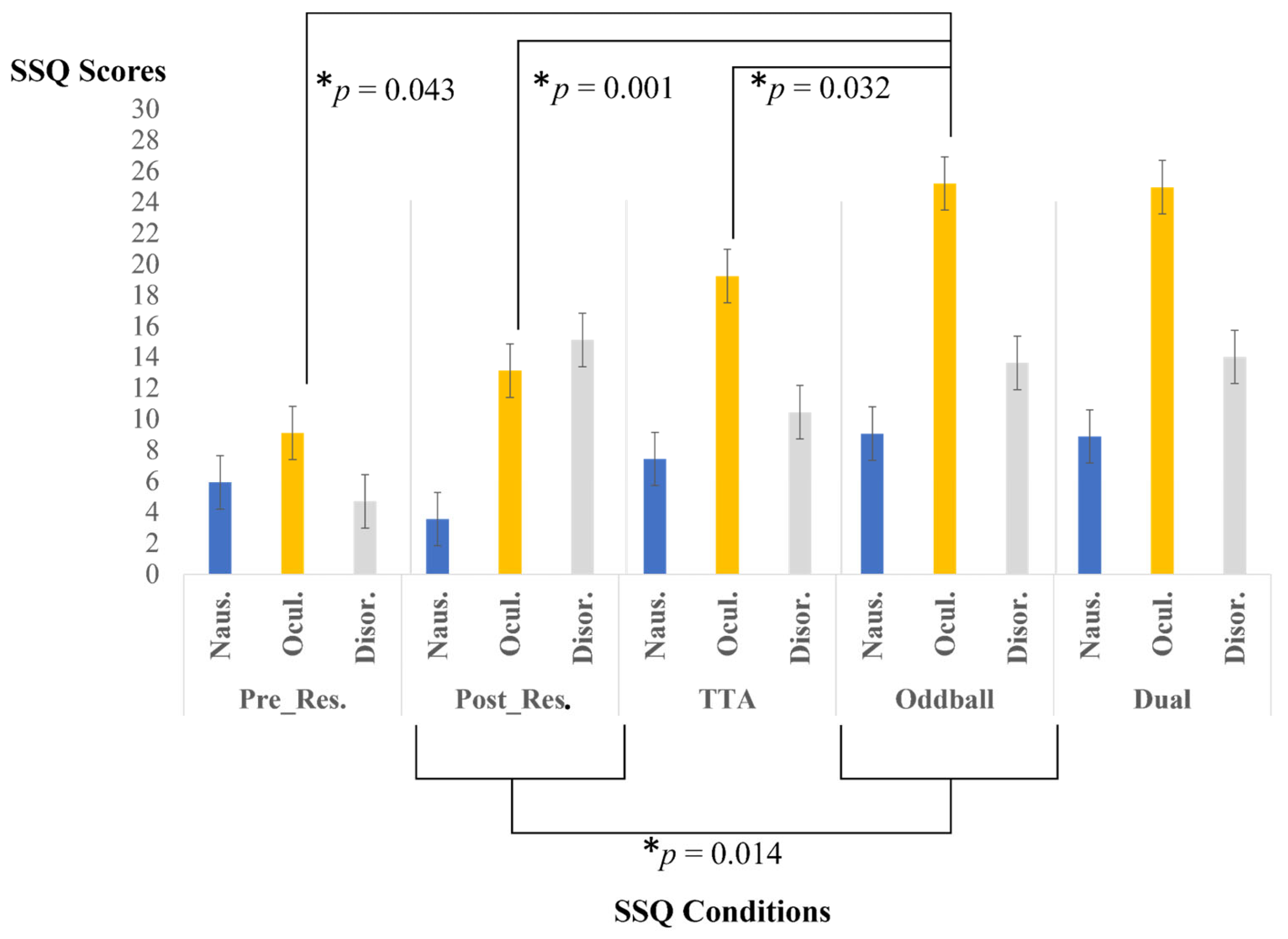
3.2.5. Cybersickness
3.2.6. Immersion/Presence
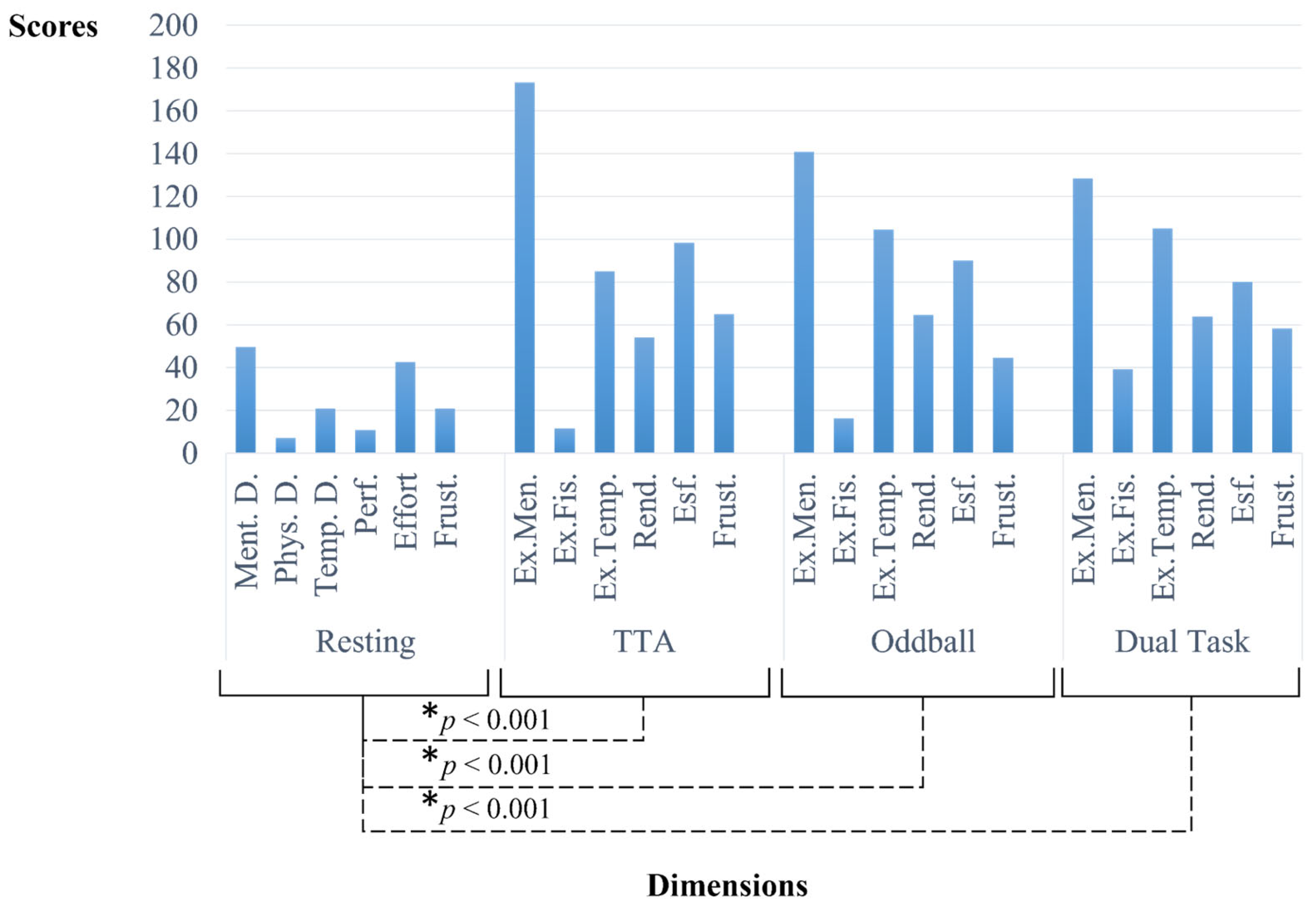
3.2.7. Cognitive Workload
3.2.8. Relations between Cybersickness, Presence, and Cognitive Workload
4. Discussion
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Full Name | Meaning |
|---|---|---|
| ANOVA RM-ANOVA | (Repeated measures) Analysis of Variance | Collection of statistical models used to evaluate differences between group means |
| ASR | Artifact Subspace Reconstruction | Mathematical method used for removing high-amplitude artifacts from EEG |
| C3, C4, CP1, CP2, CP5, CP6, CZ | Name of the electrodes placed at the central (C) lobe | Locations of the scalp electrodes as described by the International 10–20 system |
| (Early-/Late-) CNV | (Early-/Late-) Contingent Negative Variation | Slow, negative potential observed on the surface during the interval between cerebral responses to two stimuli, particularly when the second stimulus necessitates a motor response or a decision from the subject |
| CMI | Cognitive–Motor Interference | Decline in performance occurring during the concurrent execution of a cognitive and a motor task (dual task scenario) |
| dB | Decibel | Unit of measurement used for sound power in acoustics. Used to determine the environmental levels of environmental sounds in VR scenarios |
| DOF | Degrees of Freedom | Number of axes that a rigid body can freely move in 3D space |
| EEG | Electroencephalogram | Method used to record an electrogram of the bio-signals generated by the electrical activity of the brain |
| ERP | Event-Related Potentials | Electrophysiological response of the brain to an (internal or environmental) event |
| HMD | Head-Mounted Displays | Helmet-like visualization devices that can project computer-generated images onto a display located very close to the user’s eyes |
| F3, F4, F7, F8, FC1, FC2, FC5, FC6, FP1, FP2, FPZ, FT9, FT10, FZ | Name of the electrodes placed at the frontal (F) lobe | Locations of the scalp electrodes as described by the International 10–20 system |
| K | Kelvin degrees | Unit of measurement of the color temperature of light sources. Used to set some specific color values in the VR scenarios |
| ICA | Independent Component Analysis | Computational technique used to decompose a multivariate signal into its additive subcomponents |
| ISM | Industrial, Scientifical, Medical (bands) | Portions of the radio spectrum globally designated for industrial, scientific, and medical (ISM) uses |
| LAN/WAN | Local/Wide Area Network | Computer networks with different geographical coverage |
| LCD | Liquid-Crystal Display | Type of flat panel display |
| LED | Light-Emitting Diode | A device that produces light as electrical current passes through it |
| LPDDR | Low-Power Double Data Rate | Type of synchronous dynamic random-access memory |
| M | Mean | A statistical measure of central tendency |
| MR | Mixed Reality | Combination of virtual and augmented reality where both real and virtual objects and/or people can interact |
| NASA-TLX | NASA Task Load Index | A subjective, multidimensional tool commonly used to evaluate perceived workload |
| O1, O2, OZ | Name of the electrodes placed at the occipital (O) lobe | Locations of the scalp electrodes as described by the International 10–20 system |
| P3, P4, P7, P8, PZ | Name of the electrodes placed at the parietal (P) lobe | Locations of the scalp electrodes as described by the International 10–20 system |
| PCIe | Peripheral Component Interconnect Express | Standard interface used for connecting high-speed components |
| POSIX (time) | Portable Operating System Interface for Unix (time) | Date and time representation originally conceived for Unix operating systems |
| PQ | Presence Questionnaire | Tool used to measure the personal, psychological state of “being there” experienced in immersive virtual environments |
| RGB | Red-Green-Blue | Additive color model used to generate a wide range of colors for digital environments |
| RT | Reaction Time | Amount of time taken for a person to respond to a given stimulus |
| SE | Standard Error | Measure of the deviation of the sample mean from the population mean |
| SSQ | Simulation Sickness Questionnaire | Tool used to measure users’ level of (cyber)sickness levels in VR environments |
| T7, T8, TP9, TP10 | Name of the electrodes placed at the temporal (T) lobe | Locations of the scalp electrodes as described by the International 10–20 system |
| TTA | Time-to-Arrival | Time required for a moving object to reach a stationary target |
| V6/V8 | Six- or eight-cylinder piston engines whose banks are arranged in a V configuration | |
| VR | Virtual Reality | Computer-generated environment whose simulated scenes and objects appear highly realistic |
| VRU | Vulnerable Road Users | Non-motorized road users, such as pedestrians, (motor-)cyclists, and persons with reduced mobility |
Appendix B
References
- European Road Safety Observatory Annual Statistical Report on Road Safety in the EU, 2022. 2023. Available online: https://road-safety.transport.ec.europa.eu/document/download/287aa31e-48c2-4e04-a9cc-e2ca24d29cc2_en?filename=ERSO_annual_report_20220509.pdf (accessed on 27 March 2024).
- European Commission. Roadmap to a Single European Transport Area-Towards a Competitive and Resource Efficient Transport System. White Pap. Commun. 2011, 144. [Google Scholar]
- Pugliese, B.J.; Barton, B.K.; Davis, S.J.; Lopez, G. Assessing Pedestrian Safety across Modalities via a Simulated Vehicle Time-to-Arrival Task. Accid. Anal. Prev. 2020, 134, 105344. [Google Scholar] [CrossRef]
- Horberry, T.; Osborne, R.; Young, K. Pedestrian Smartphone Distraction: Prevalence and Potential Severity. Transp. Res. Part. F Traffic Psychol. Behav. 2019, 60, 515–523. [Google Scholar] [CrossRef]
- Hamacher, D.; Herold, F.; Wiegel, P.; Hamacher, D.; Schega, L. Brain Activity during Walking: A Systematic Review. Neurosci. Biobehav. Rev. 2015, 57, 310–327. [Google Scholar] [CrossRef] [PubMed]
- Marucci, M.; Di Flumeri, G.; Borghini, G.; Sciaraffa, N.; Scandola, M.; Pavone, E.F.; Babiloni, F.; Betti, V.; Aricò, P. The Impact of Multisensory Integration and Perceptual Load in Virtual Reality Settings on Performance, Workload and Presence. Sci. Rep. 2021, 11, 4831. [Google Scholar] [CrossRef] [PubMed]
- Losada, Á.; Páez, F.J.; Luque, F.; Piovano, L. Application of Machine Learning Techniques for Predicting Potential Vehicle-to-Pedestrian Collisions in Virtual Reality Scenarios. Appl. Sci. 2022, 12, 11364. [Google Scholar] [CrossRef]
- Losada, Á.; Páez, F.J.; Luque, F.; Piovano, L. Effectiveness of the Autonomous Braking and Evasive Steering System OPREVU-AES in Simulated Vehicle-to-Pedestrian Collisions. Vehicles 2023, 5, 1553–1569. [Google Scholar] [CrossRef]
- Slater, M. Place Illusion and Plausibility Can Lead to Realistic Behaviour in Immersive Virtual Environments. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 3549–3557. [Google Scholar] [CrossRef]
- Tran, T.T.M.; Parker, C.; Tomitsch, M. A Review of Virtual Reality Studies on Autonomous Vehicle–Pedestrian Interaction. IEEE Trans. Hum. Mach. Syst. 2021, 51, 641–652. [Google Scholar] [CrossRef]
- Ridel, D.; Rehder, E.; Lauer, M.; Stiller, C.; Wolf, D. A Literature Review on the Prediction of Pedestrian Behavior in Urban Scenarios. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3105–3112. [Google Scholar]
- Riegler, A.; Riener, A.; Holzmann, C. A Systematic Review of Virtual Reality Applications for Automated Driving: 2009–2020. Front. Hum. Dyn. 2021, 3, 689856. [Google Scholar] [CrossRef]
- Feng, Y.; Duives, D.; Daamen, W.; Hoogendoorn, S. Data Collection Methods for Studying Pedestrian Behaviour: A Systematic Review. Build. Environ. 2021, 187, 107329. [Google Scholar] [CrossRef]
- Schneider, S.; Bengler, K. Virtually the Same? Analysing Pedestrian Behaviour by Means of Virtual Reality. Transp. Res. Part. F Traffic Psychol. Behav. 2020, 68, 231–256. [Google Scholar] [CrossRef]
- Bhagavathula, R.; Williams, B.; Owens, J.; Gibbons, R. The Reality of Virtual Reality: A Comparison of Pedestrian Behavior in Real and Virtual Environments. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 2056–2060. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Xia, L.; Song, W.; Bode, N.W.F. Comparing the Route-Choice Behavior of Pedestrians around Obstacles in a Virtual Experiment and a Field Study. Transp. Res. Part. C Emerg. Technol. 2019, 107, 120–136. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Brewer, M.A.; Turner, S. Another Look at Pedestrian Walking Speed. Transp. Res. Rec. 2006, 1982, 21–29. [Google Scholar] [CrossRef]
- Deb, S.; Carruth, D.W.; Sween, R.; Strawderman, L.; Garrison, T.M. Efficacy of Virtual Reality in Pedestrian Safety Research. Appl. Erg. 2017, 65, 449–460. [Google Scholar] [CrossRef] [PubMed]
- Iryo-Asano, M.; Hasegawa, Y.; Dias, C. Applicability of Virtual Reality Systems for Evaluating Pedestrians’ Perception and Behavior. Transp. Res. Procedia 2018, 34, 67–74. [Google Scholar] [CrossRef]
- Sauer, Y.; Sipatchin, A.; Wahl, S.; García García, M. Assessment of Consumer VR-Headsets’ Objective and Subjective Field of View (FoV) and Its Feasibility for Visual Field Testing. Virtual Real. 2022, 26, 1089–1101. [Google Scholar] [CrossRef]
- Maruhn, P.; Schneider, S.; Bengler, K. Measuring Egocentric Distance Perception in Virtual Reality: Influence of Methodologies, Locomotion and Translation Gains. PLoS ONE 2019, 14, e0224651. [Google Scholar] [CrossRef]
- Caserman, P.; Garcia-Agundez, A.; Gámez Zerban, A.; Göbel, S. Cybersickness in Current-Generation Virtual Reality Head-Mounted Displays: Systematic Review and Outlook. Virtual Real. 2021, 25, 1153–1170. [Google Scholar] [CrossRef]
- Bhardwaj, R.; Balasubramanian, V. EEG Based Assessment of Pedestrian Perception of Automobile in Low Illumination Road. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 397–405. [Google Scholar]
- Protzak, J.; Wiczorek, R.; Gramann, K. Peripheral Visual Perception during Natural Overground Dual-Task Walking in Older and Younger Adults. Neurobiol. Aging 2021, 98, 146–159. [Google Scholar] [CrossRef] [PubMed]
- Nenna, F.; Do, C.-T.; Protzak, J.; Gramann, K. Alteration of Brain Dynamics during Natural Dual-Task Walking. bioRxiv 2020. bioRxiv:2020.02.27.968164. [Google Scholar] [CrossRef]
- Maidan, I.; Fahoum, F.; Shustak, S.; Gazit, E.; Patashov, D.; Tchertov, D.; Giladi, N.; Hausdorff, J.M.; Mirelman, A. Changes in Event-Related Potentials during Dual-Task Walking in Aging and Parkinson’s Disease. Clin. Neurophysiol. 2019, 130, 224–230. [Google Scholar] [CrossRef]
- Gramann, K.; Gwin, J.T.; Bigdely-Shamlo, N.; Ferris, D.P.; Makeig, S. Visual Evoked Responses during Standing and Walking. Front. Hum. Neurosci. 2010, 4, 202. [Google Scholar] [CrossRef] [PubMed]
- Richardson, D.P.; Foxe, J.J.; Mazurek, K.A.; Abraham, N.; Freedman, E.G. Neural Markers of Proactive and Reactive Cognitive Control Are Altered during Walking: A Mobile Brain-Body Imaging (MoBI) Study. Neuroimage 2022, 247, 118853. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Cao, L.; Haendel, B.F. Human Visual Processing during Walking: Dissociable Pre- and Post-Stimulus Influences. Neuroimage 2022, 264, 119757. [Google Scholar] [CrossRef]
- Polich, J. Detection of Change: Event-Related Potential and FMRI Findings; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Fischer, T.; Langner, R.; Birbaumer, N.; Brocke, B. Arousal and Attention: Self-Chosen Stimulation Optimizes Cortical Excitability and Minimizes Compensatory Effort. J. Cogn. Neurosci. 2008, 20, 1443–1453. [Google Scholar] [CrossRef]
- Guo, M.; Jin, J.; Jiao, Y.; Wang, X.; Cichockia, A. Investigation of Visual Stimulus with Various Colors and the Layout for the Oddball Paradigm in Evoked Related Potential-Based Brain–Computer Interface. Front. Comput. Neurosci. 2019, 13, 24. [Google Scholar] [CrossRef]
- Röhricht, J.; Jo, H.G.; Wittmann, M.; Schmidt, S. Exploring the Maximum Duration of the Contingent Negative Variation. Int. J. Psychophysiol. 2018, 128, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Battaglini, L.; Casco, C.; Isaacs, B.R.; Bridges, D.; Ganis, G. Electrophysiological Correlates of Motion Extrapolation: An Investigation on the CNV. Neuropsychologia 2017, 95, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Van Rijn, H.; Kononowicz, T.W.; Meck, W.H.; Ng, K.K.; Penney, T.B. Contingent Negative Variation and Its Relation to Time Estimation: A Theoretical Evaluation. Front. Integr. Neurosci. 2011, 5, 91. [Google Scholar] [CrossRef] [PubMed]
- Al Boustani, G.; Weiß, L.J.K.; Li, H.; Meyer, S.M.; Hiendlmeier, L.; Rinklin, P.; Menze, B.; Hemmert, W.; Wolfrum, B. Influence of Auditory Cues on the Neuronal Response to Naturalistic Visual Stimuli in a Virtual Reality Setting. Front. Hum. Neurosci. 2022, 16, 809293. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Kennedy, R.S.; Lane, N.E.; Berbaum, K.S.; Lilienthal, M.G. Simulator Sickness Questionnaire: An Enhanced Method for Quantifying Simulator Sickness. Int. J. Aviat. Psychol. 1993, 3, 203–220. [Google Scholar] [CrossRef]
- Witmer, B.G.; Singer, M.J. Measuring Presence in Virtual Environments: A Presence Questionnaire. Presence 1998, 7, 225–240. [Google Scholar] [CrossRef]
- Llinares, C.; Higuera-Trujillo, J.L.; Montañana, A.; Castilla, N. Improving the Pedestrian’s Perceptions of Safety on Street Crossings. Psychological and Neurophysiological Effects of Traffic Lanes, Artificial Lighting, and Vegetation. Int. J. Environ. Res. Public Health 2020, 17, 8576. [Google Scholar] [CrossRef]
- Dinh, H.Q.; Walker, N.; Hodges, L.F.; Song, C.; Kobayashi, A. Evaluating the Importance of Multi-Sensory Input on Memory and the Sense of Presence in Virtual Environments. In Proceedings of the IEEE Virtual Reality (Cat. No. 99CB36316), Houston, TX, USA, 13–17 March 1999; pp. 222–228. [Google Scholar]
- Nan, C.; Wang, G.; Wang, H.; Wang, X.; Liu, Z.; Xiao, L.; Bai, H.; Wu, S. The P300 Component Decreases in a Bimodal Oddball Task in Individuals with Depression: An Event-Related Potentials Study. Clin. Neurophysiol. 2018, 129, 2525–2533. [Google Scholar] [CrossRef] [PubMed]
- Lockley, S.W.; Evans, E.E.; Scheer, F.A.J.L.; Brainard, G.C.; Czeisler, C.A.; Aeschbach, D. Short-Wavelength Sensitivity for the Direct Effects of Light on Alertness, Vigilance, and the Waking Electroencephalogram in Humans. Sleep 2006, 29, 161–168. [Google Scholar] [CrossRef]
- Vandewalle, G.; Maquet, P.; Dijk, D.J. Light as a Modulator of Cognitive Brain Function. Trends Cogn. Sci. 2009, 13, 429–438. [Google Scholar] [CrossRef]
- Pala, P.; Cavallo, V.; Dang, N.T.; Granié, M.A.; Schneider, S.; Maruhn, P.; Bengler, K. Analysis of Street-Crossing Behavior: Comparing a CAVE Simulator and a Head-Mounted Display among Younger and Older Adults. Accid. Anal. Prev. 2021, 152, 106004. [Google Scholar] [CrossRef] [PubMed]
- Brunia, C.H.M.; Damcn, E.J.P. Distribution of Slow Brain Potentials Related to Motor Preparation and Stimulus Anticipation in a Time Estimation Task. Electroencephalogr. Clin. Neurophysiol. 1988, 69, 234–243. [Google Scholar] [CrossRef] [PubMed]
- Protzak, J.; Wiczorek, R. On the Influence of Walking on Hazard Detection for Prospective User-Centered Design of an Assistance System for Older Pedestrians. i-com 2017, 16, 87–98. [Google Scholar] [CrossRef]
- Dommes, A.; Cavallo, V. The Role of Perceptual, Cognitive, and Motor Abilities in Street-Crossing Decisions of Young and Older Pedestrians. Ophthalmic Physiol. Opt. 2011, 31, 292–301. [Google Scholar] [CrossRef]
- Patelaki, E.; Foxe, J.J.; Mazurek, K.A.; Freedman, E.G. Young Adults Who Improve Performance during Dual-Task Walking Show More Flexible Reallocation of Cognitive Resources: A Mobile Brain-Body Imaging (MoBI) Study. Cereb. Cortex 2023, 33, 2573–2592. [Google Scholar] [CrossRef]
- De Arquer, I.; Nogareda, C. NTP 544: Estimación de La Carga Mental de Trabajo: El Método NASA TLX. Madrid: Instituto Nacional de Higiene y Seguridad en el Trabajo, Ministerio de Trabajo y Seguridad Social del Gobierno de España. 2000. Available online: https://www.insst.es/documents/94886/326853/ntp_544.pdf/ (accessed on 27 March 2024).
- Jerome, C.J.; Singer, M.J. The Factor Structure of the Presence Questionnaire. Presence Teleoperators Virtual Environ. 2005, 14, 298–312. [Google Scholar]
- Delorme, A.; Makeig, S. EEGLAB: An Open Source Toolbox for Analysis of Single-Trial EEG Dynamics Including Independent Component Analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.Y.; Hsu, S.H.; Pion-Tonachini, L.; Jung, T.P. Evaluation of Artifact Subspace Reconstruction for Automatic Artifact Components Removal in Multi-Channel EEG Recordings. IEEE Trans. Biomed. Eng. 2020, 67, 1114–1121. [Google Scholar] [CrossRef] [PubMed]
- Pizzamiglio, S.; Naeem, U.; Abdalla, H.; Turner, D.L. Neural Correlates of Single-and Dual-Task Walking in the Real World. Front. Hum. Neurosci. 2017, 11, 460. [Google Scholar] [CrossRef]
- Patelaki, E.; Foxe, J.J.; Mantel, E.P.; Kassis, G.; Freedman, E.G. Paradoxical Improvement of Cognitive Control in Older Adults under Dual-Task Walking Conditions Is Associated with More Flexible Reallocation of Neural Resources: A Mobile Brain-Body Imaging (MoBI) Study. Neuroimage 2023, 273, 120098. [Google Scholar] [CrossRef]
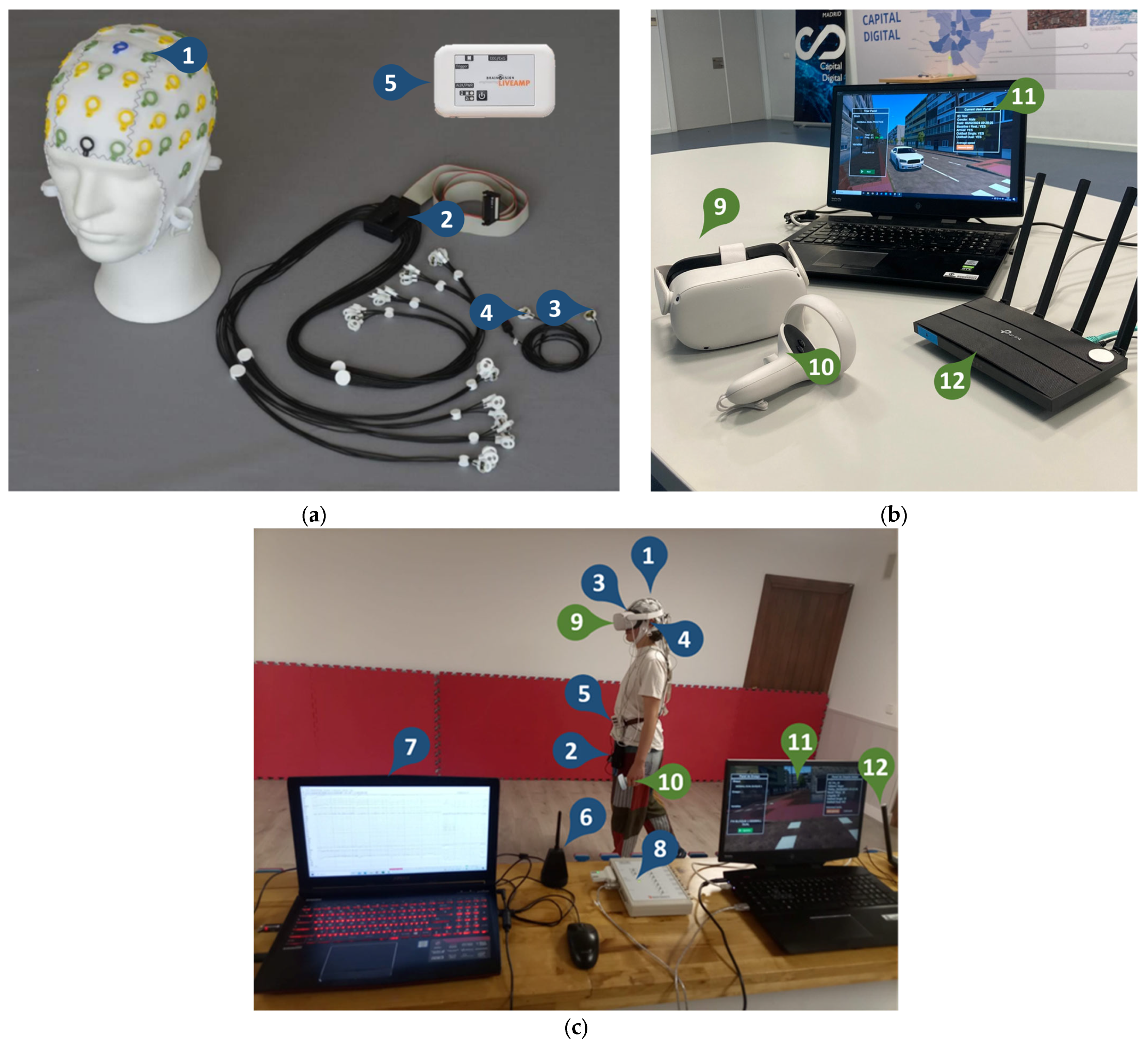






| Index | EEG and VR Equipment | Technical Details | Functional Description |
|---|---|---|---|
 | ActiCAP snap electrodes cap | 32 channels cap with slide-in electrode holders | Worn by participants during experiments for EEG recordings |
 | ActiCap slim 32 electrodes set (100 cm flat ribbon) | 32 high-quality Ag/AgCl slim active electrodes with LED feedback | Plugged into electrode cap for EEG recordings |
 | Ground electrode | High-quality Ag/AgCl slim active electrode with LED feedback | Positioned at the frontopolar midline electrode site |
 | Reference electrode | High-quality Ag/AgCl slim active electrode with LED feedback | Positioned at left mastoid |
 | LiveAmp |
| Compact wireless EEG amplifier for mobile EEG to send wirelessly recorded data to the recording laptop |
 | BrainVision Recorder software (EEG recording laptop) | To register the EEG signal of the sessions coming from LiveAmp and the triggers sent by the TriggerBox | |
 | Wireless USB Antenna | Wireless data reception: In 2.402 to 2.480 GHz ISM band | To receive the wireless data from LiveAmp |
 | Wireless TriggerBox |
| Connected to Sensor & Trigger Extension for LiveAmp, carried by participants, and to the VR laptop with a USB cable |
 | Meta Quest II Headset |
| To display the VR scenario to the user and track their positional data |
 | Meta Quest II Touch Controller |
| To allow for user interaction in the different VR tasks |
 | HP Omen 17 (cb1003ns) VR laptop |
| To run the VR application as well as conduct and manage the experiments. It also sends the triggers to the TriggerBox through a USB 2.0 cable |
 | TP-Link Archer C80-AC1900 Wi-Fi Router |
| To receive the video and audio signal from the VR laptop through the LAN port and send them wirelessly to the Meta Quest II headset |
| Condition | TTA (ms) | Electrode (μV) | ||||
|---|---|---|---|---|---|---|
| FZ | FC1 | FC2 | CZ | |||
| 30 km/h, 3 s (33) | M | 583.16 | −3.188 | −3.293 | −1.530 | −3.185 |
| SE | 156.70 | 1.238 | 0.979 | 1.124 | 0.620 | |
| 30 km/h, 5 s (35) | M | 692.14 | −2.516 | −3.073 | −3.756 | −2.554 |
| SE | 171.82 | 0.688 | 0.441 | 0.587 | 1.340 | |
| 50 km/h, 3 s (53) | M | 831.15 | −2.451 | −4.659 | −3.323 | −4.187 |
| SE | 313.32 | 1.297 | 0.999 | 0.696 | 1.553 | |
| 50 km/h, 5 s (55) | M | 882.97 | −3.827 | −2.596 | −4.159 | −3.372 |
| SE | 378.99 | 0.862 | 0.588 | 0.661 | 1.505 | |
| Paradigm | RT (ms) | Correct (%) | Incorrect (%) | Missed (%) | Electrode (μV) | |||
|---|---|---|---|---|---|---|---|---|
| FZ | CZ | PZ | ||||||
| Oddball | M | 462.71 | 99.75 | 0.15 | 0.00 | 3.341 | 3.662 | 3.502 |
| SE | 43.95 | 2.157 | 1.591 | 1.633 | ||||
| Dual Task | M | 460.88 | 99.31 | 0.78 | 0.83 | 6.004 | 6.181 | 4.406 |
| SE | 32.76 | 2.247 | 3.009 | 2.972 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luque, F.; Armada, V.; Piovano, L.; Jurado-Barba, R.; Santamaría, A. Understanding Pedestrian Cognition Workload in Traffic Environments Using Virtual Reality and Electroencephalography. Electronics 2024, 13, 1453. https://doi.org/10.3390/electronics13081453
Luque F, Armada V, Piovano L, Jurado-Barba R, Santamaría A. Understanding Pedestrian Cognition Workload in Traffic Environments Using Virtual Reality and Electroencephalography. Electronics. 2024; 13(8):1453. https://doi.org/10.3390/electronics13081453
Chicago/Turabian StyleLuque, Francisco, Víctor Armada, Luca Piovano, Rosa Jurado-Barba, and Asunción Santamaría. 2024. "Understanding Pedestrian Cognition Workload in Traffic Environments Using Virtual Reality and Electroencephalography" Electronics 13, no. 8: 1453. https://doi.org/10.3390/electronics13081453
APA StyleLuque, F., Armada, V., Piovano, L., Jurado-Barba, R., & Santamaría, A. (2024). Understanding Pedestrian Cognition Workload in Traffic Environments Using Virtual Reality and Electroencephalography. Electronics, 13(8), 1453. https://doi.org/10.3390/electronics13081453