

Improving Low-Frequency Digital Control in the Voltage Source Inverter for the UPS System


Abstract
1. Introduction
2. Design of the VSI
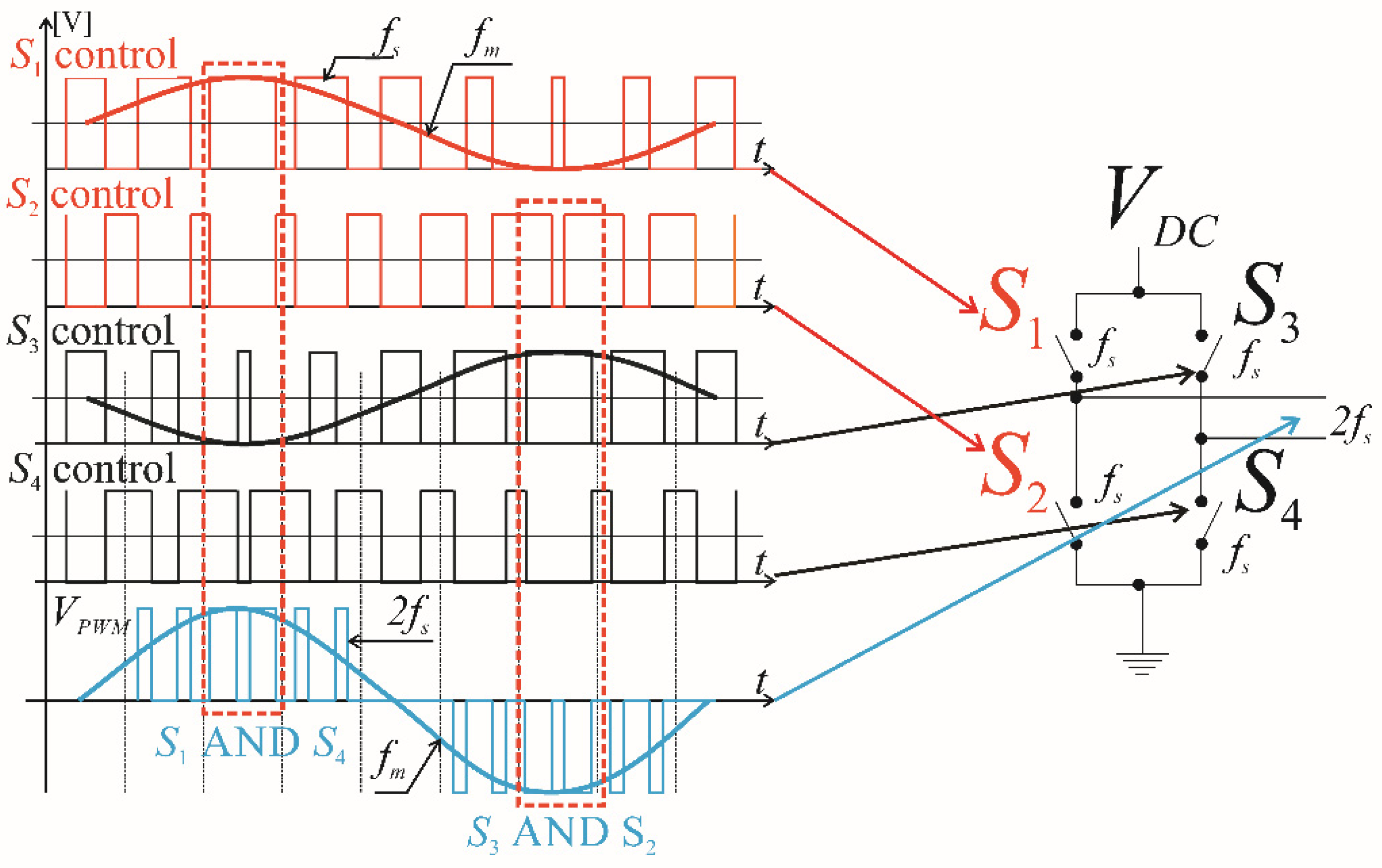
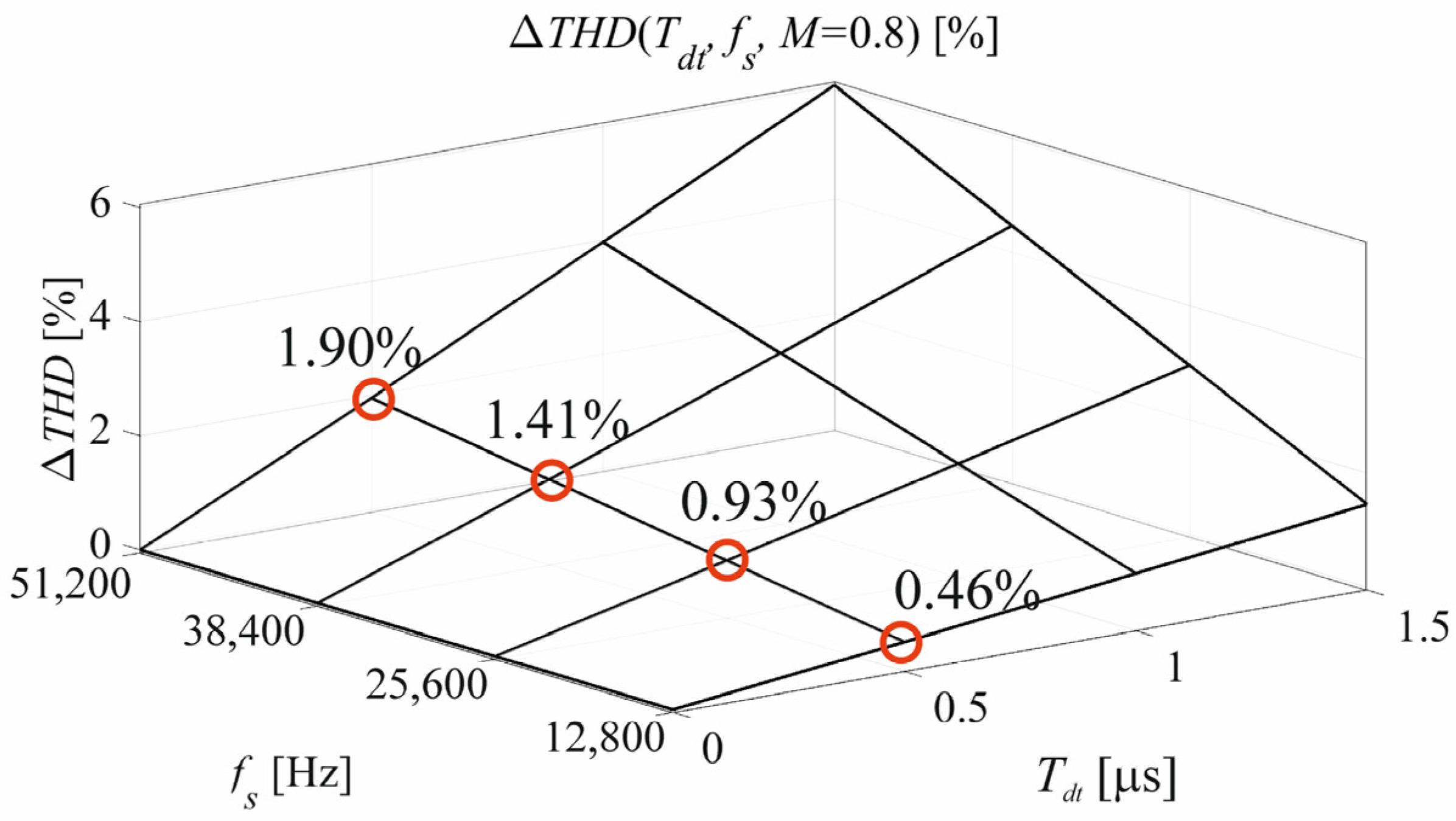
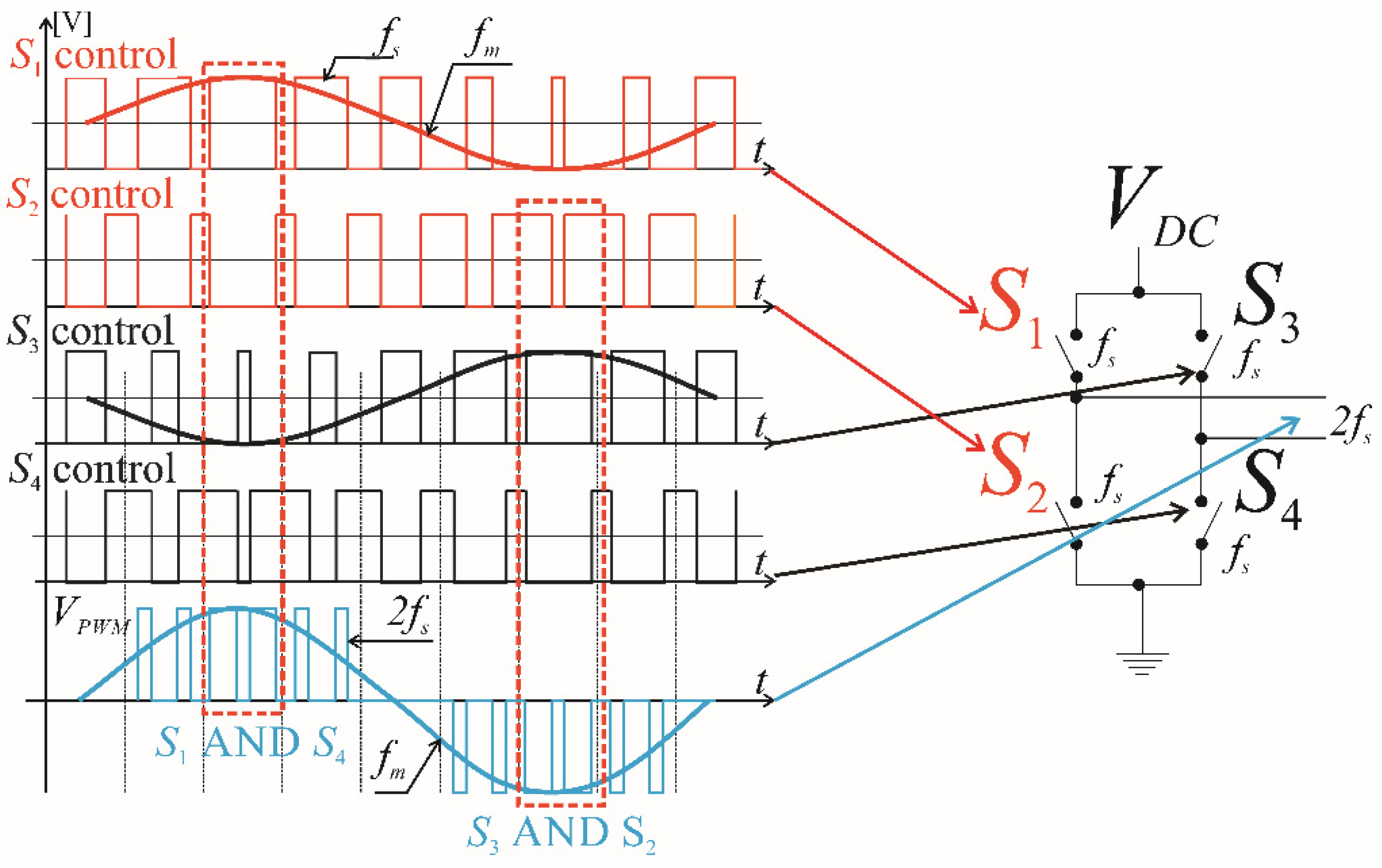
2.1. PWM Scheme
2.2. The Output Filter Design
2.3. The H-Bridge
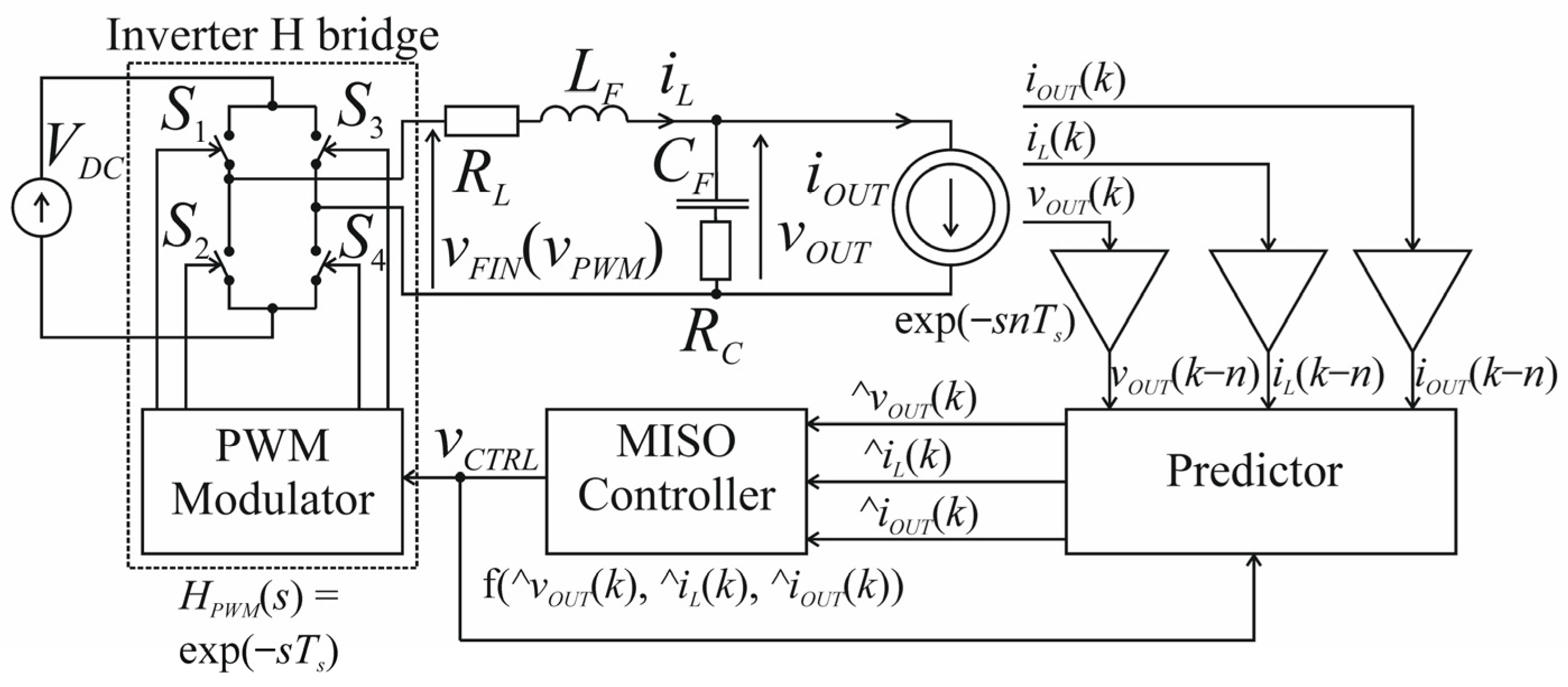
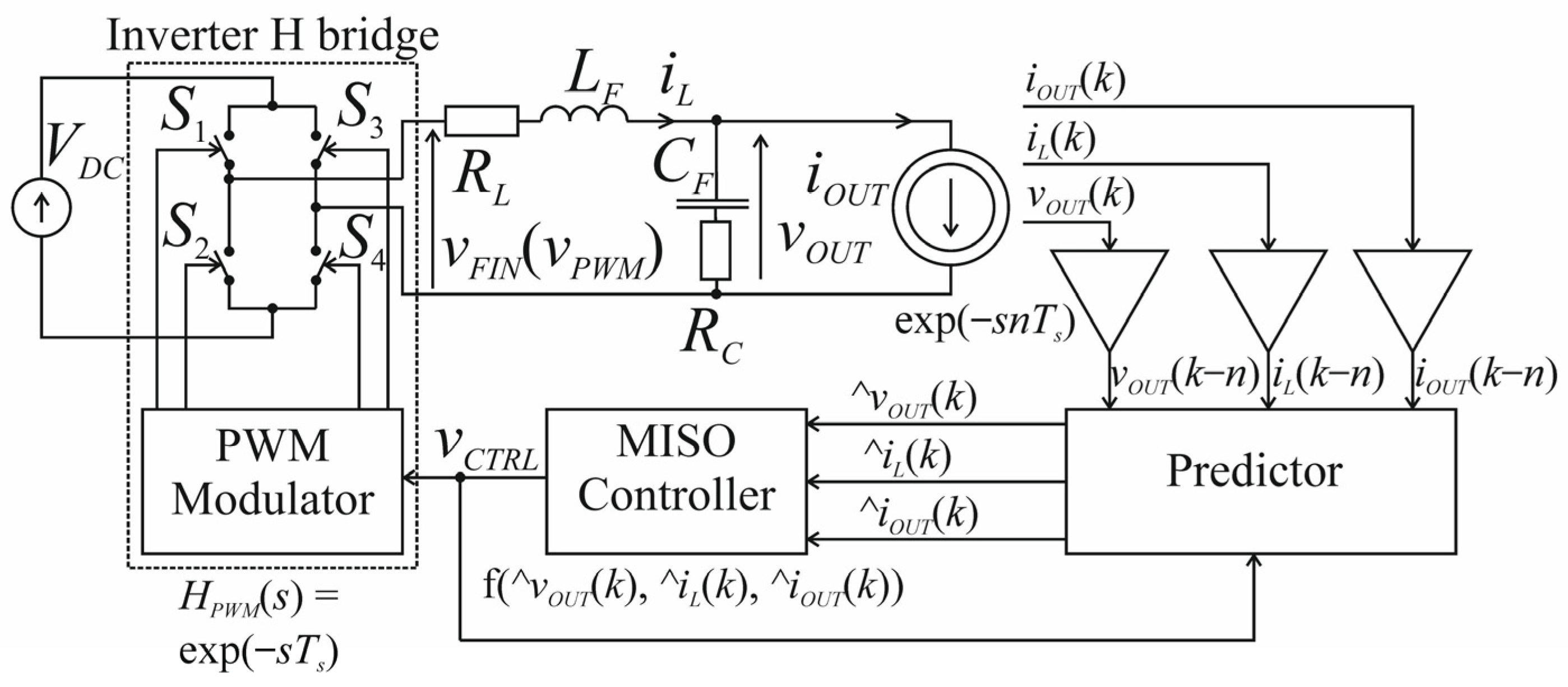
3. The Discrete Model of VSI
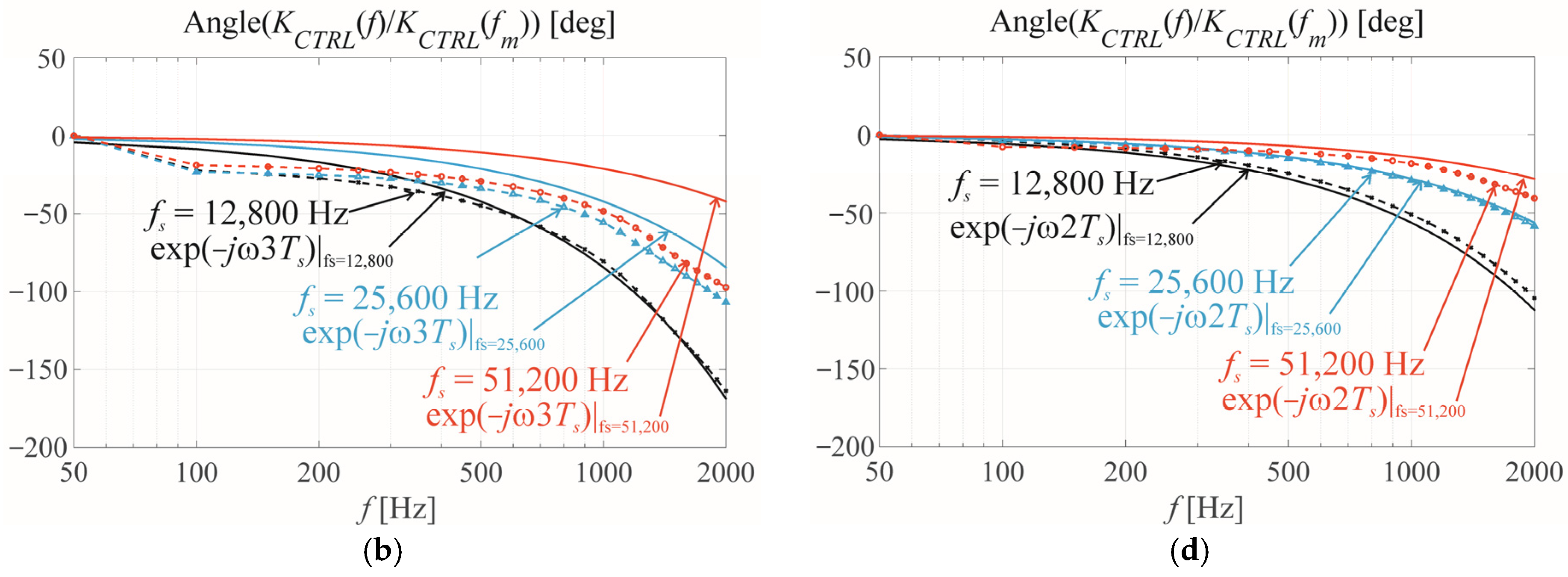
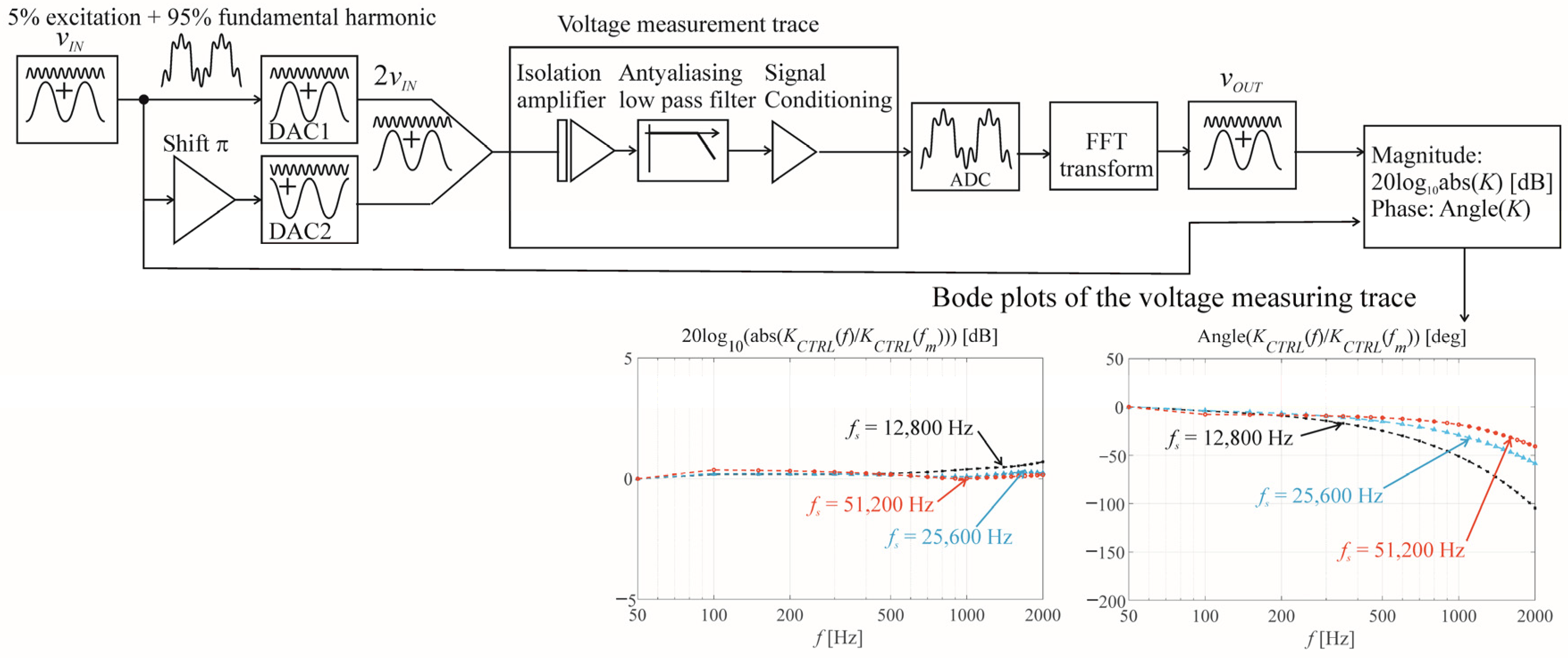
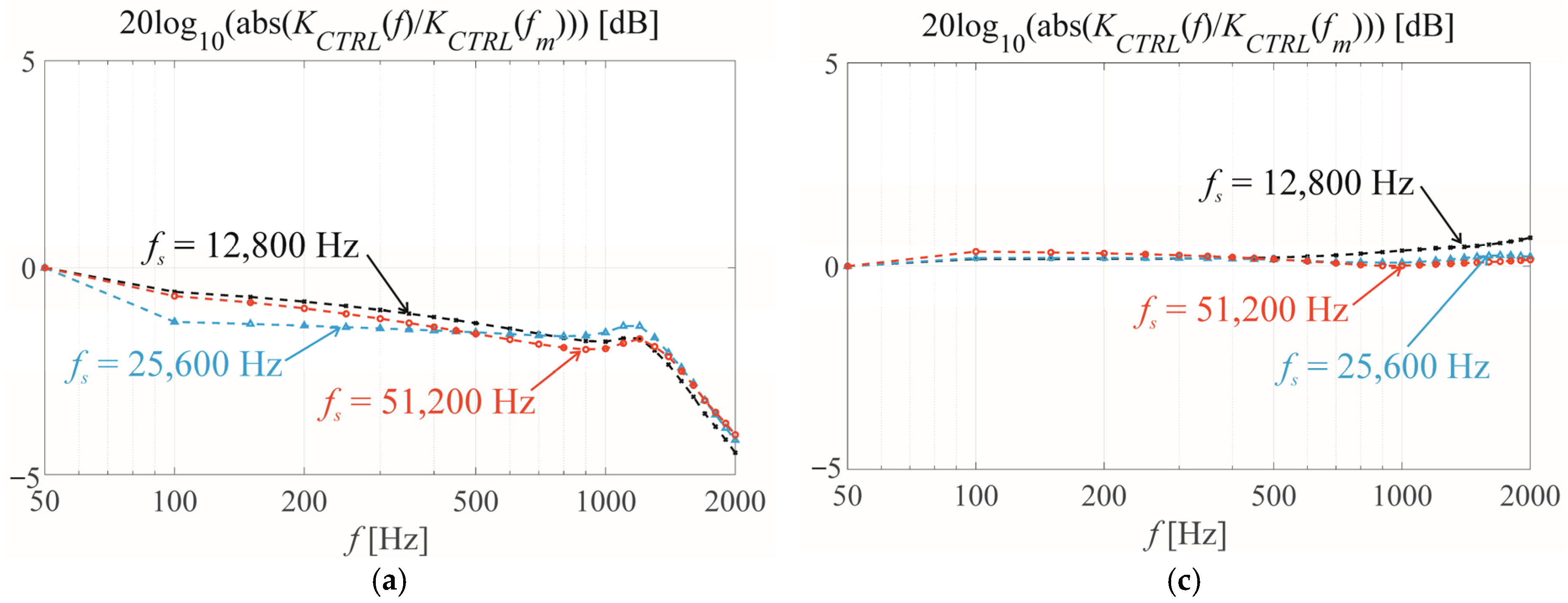
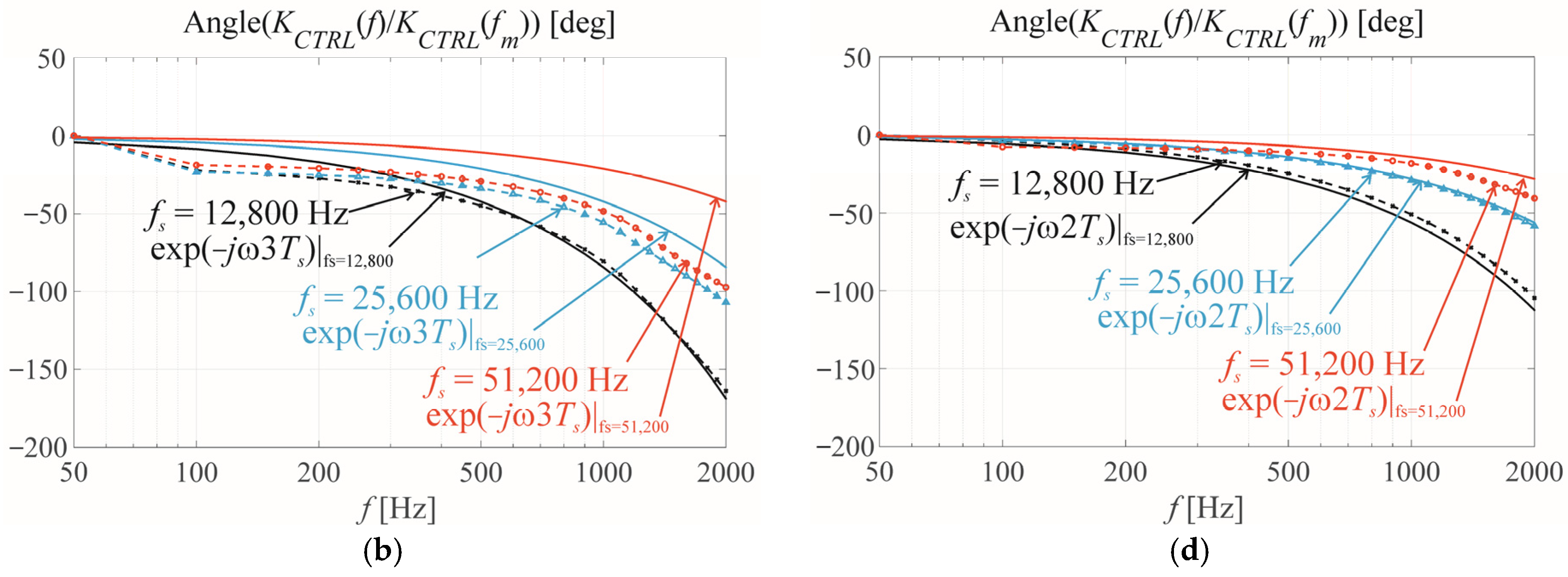
4. Bode Plots of the Measuring Traces
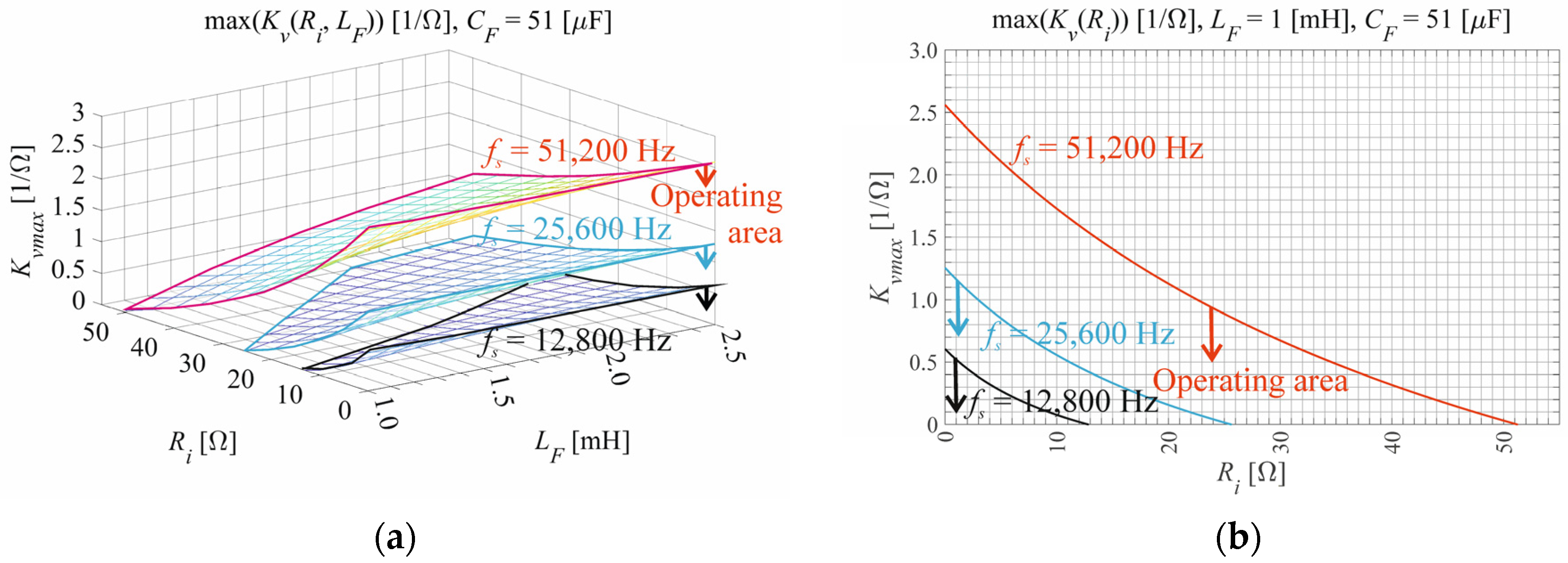
5. The MISO PBC Controller
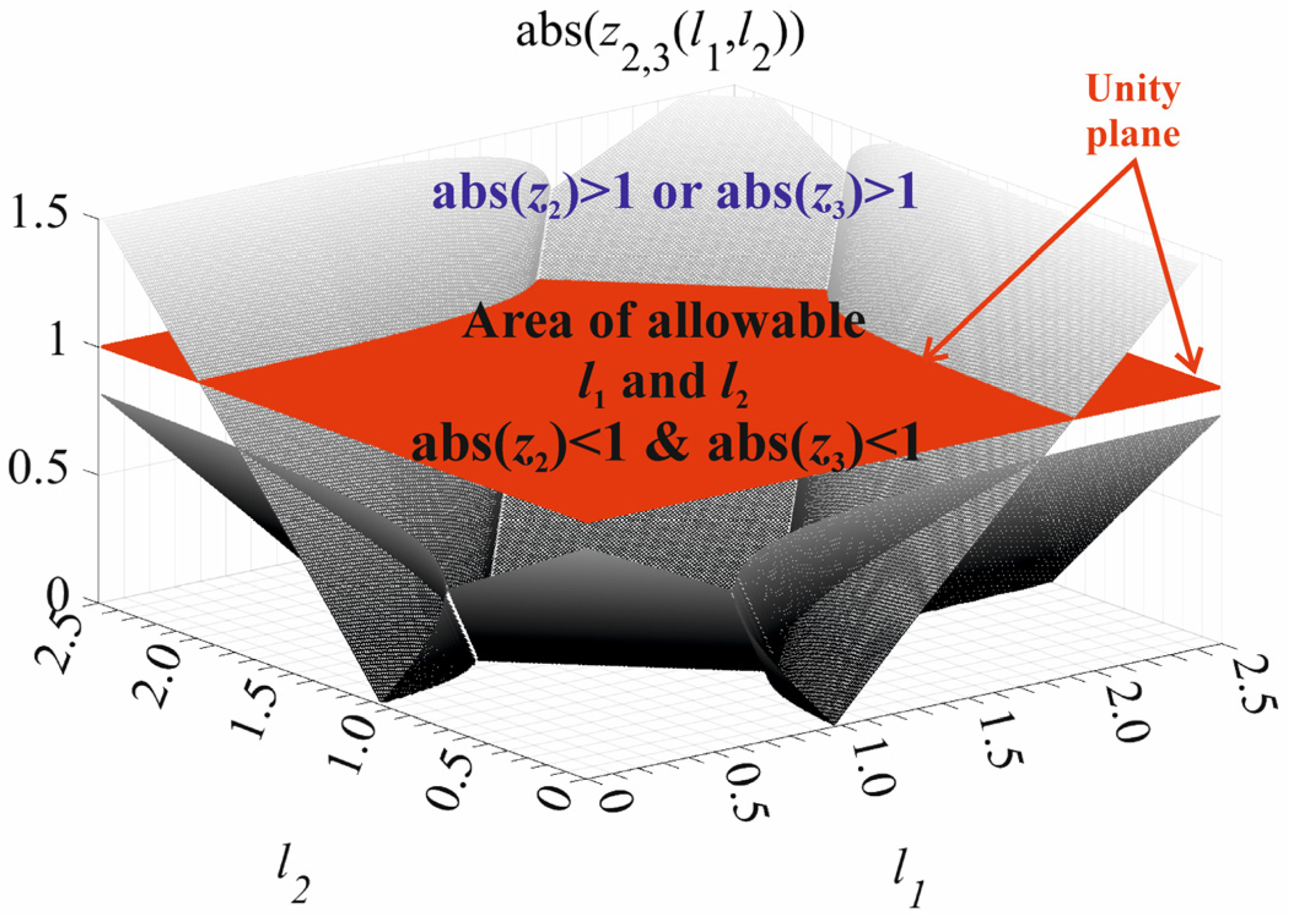
6. Predictor with the Luenberger Observer
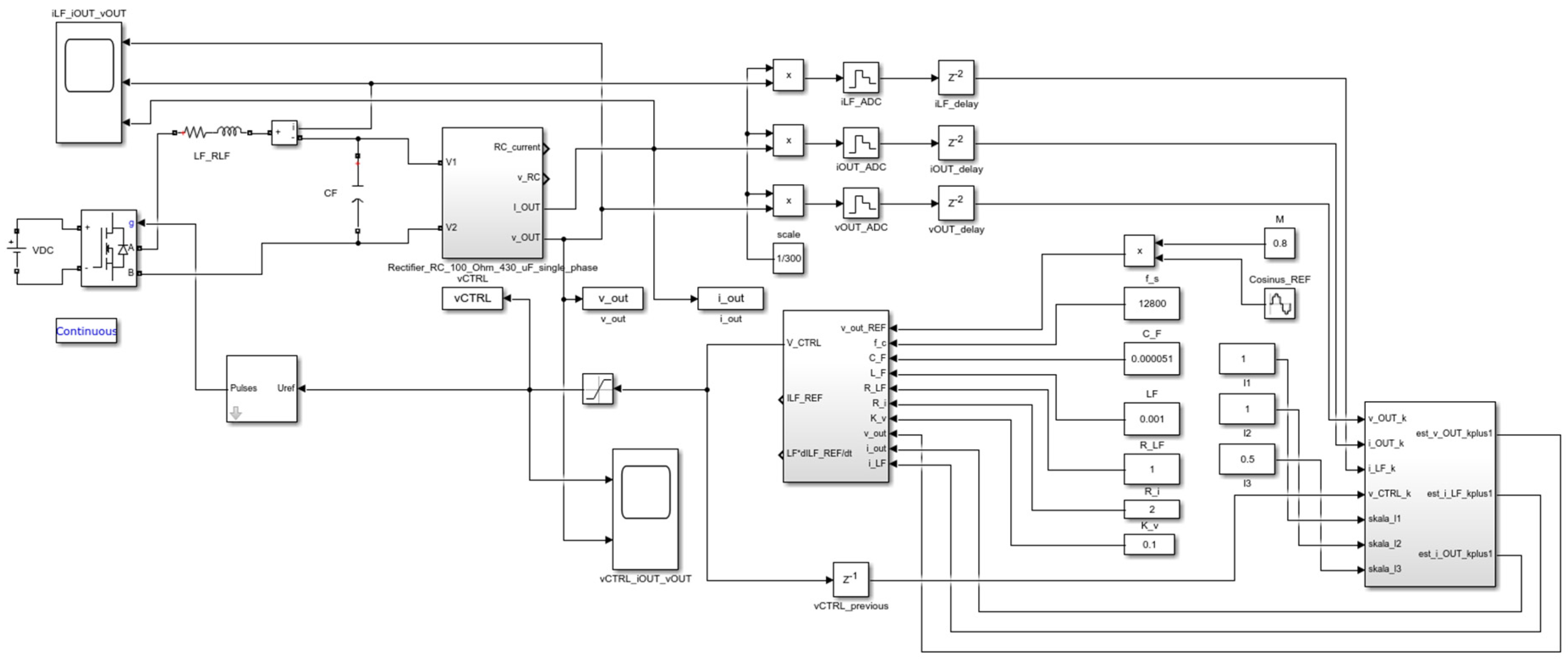
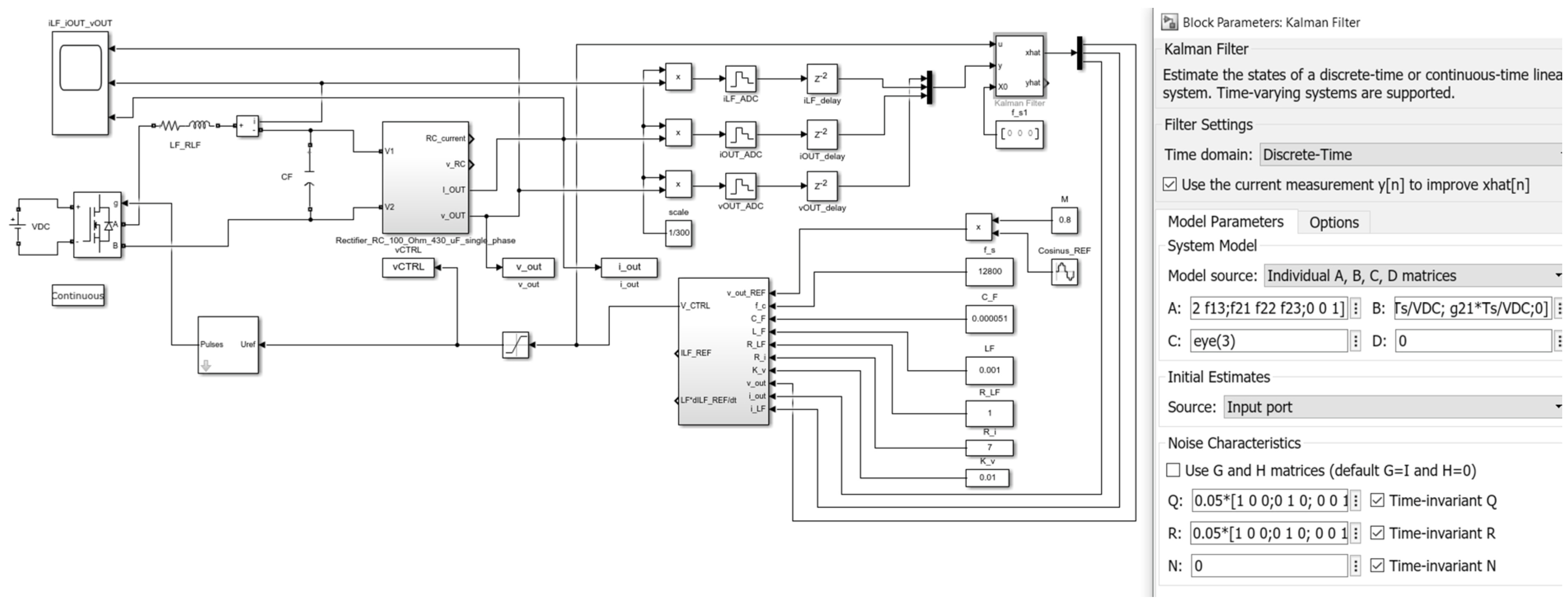
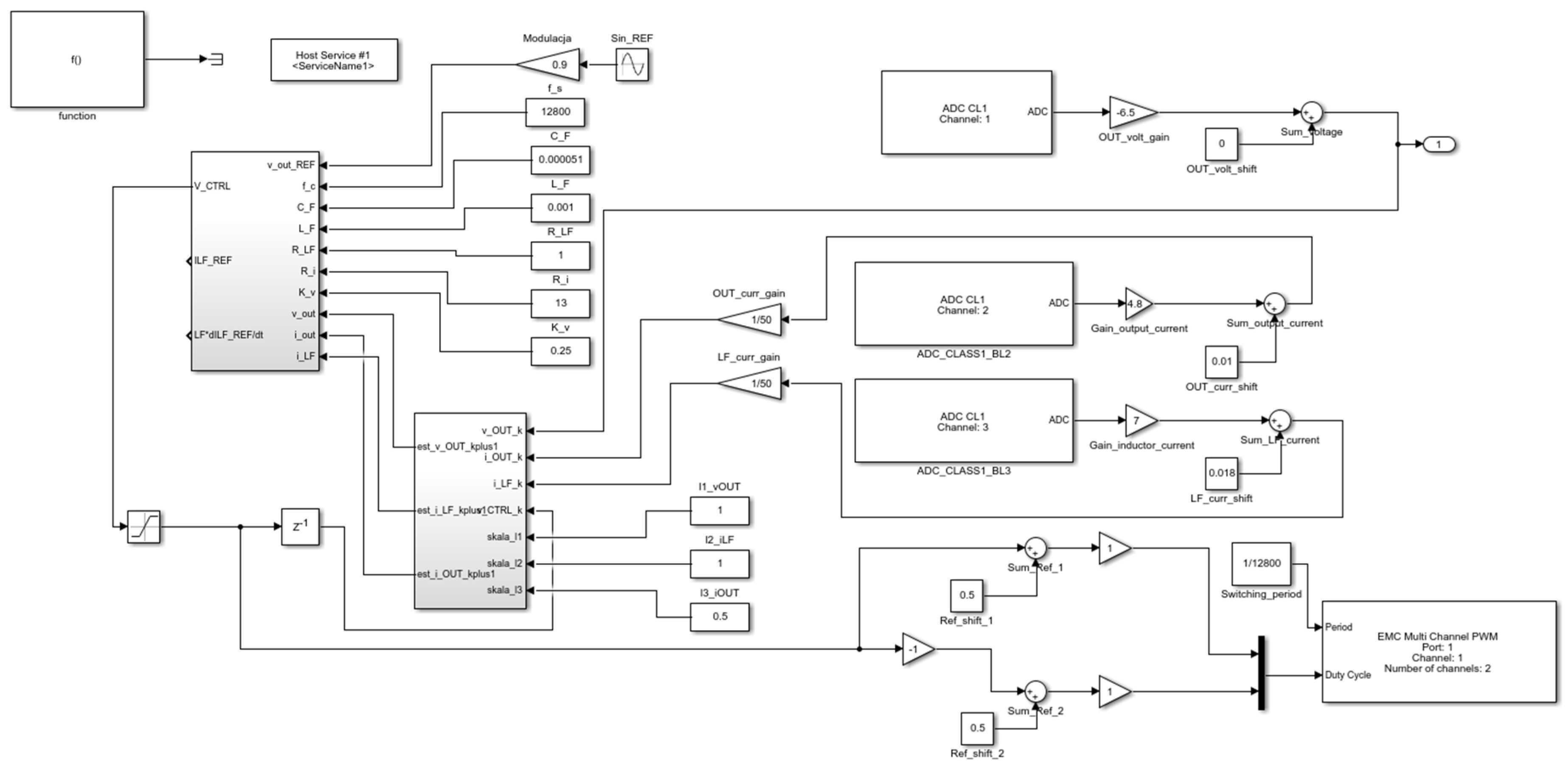
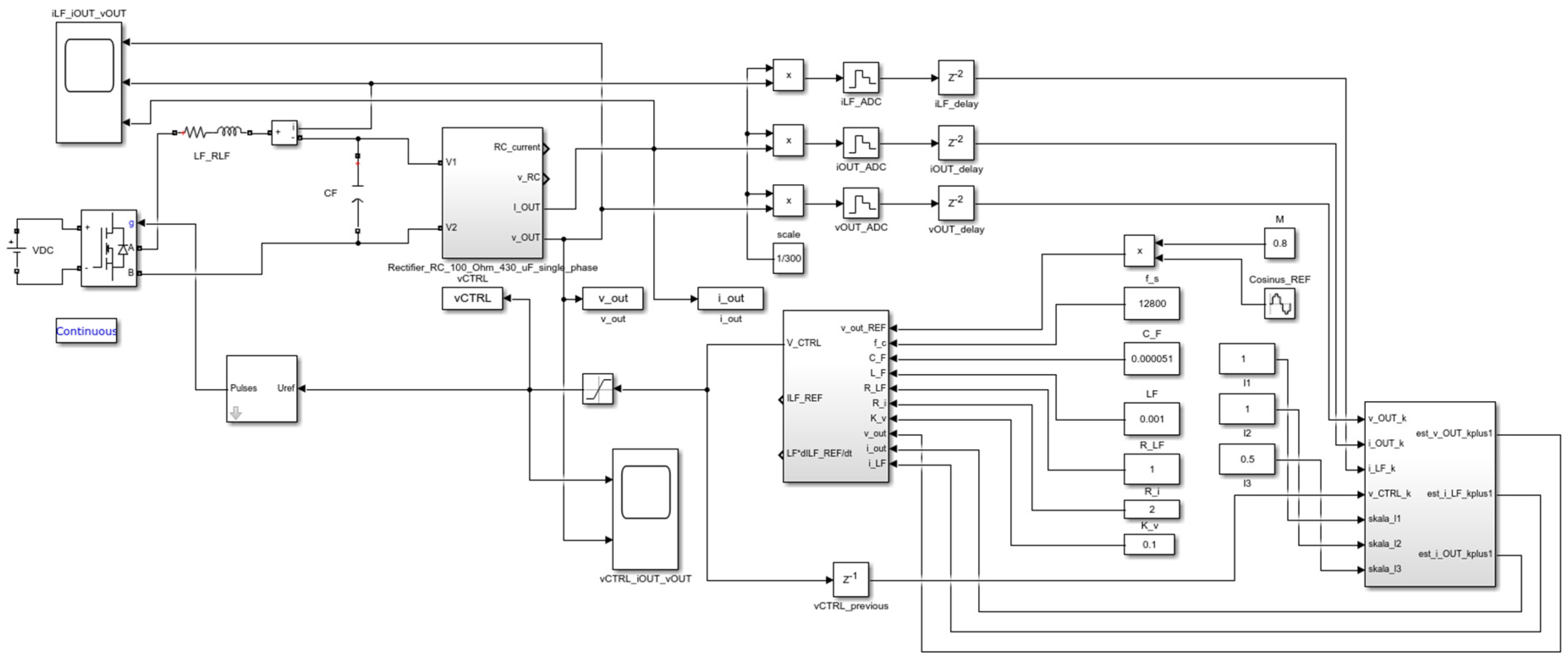
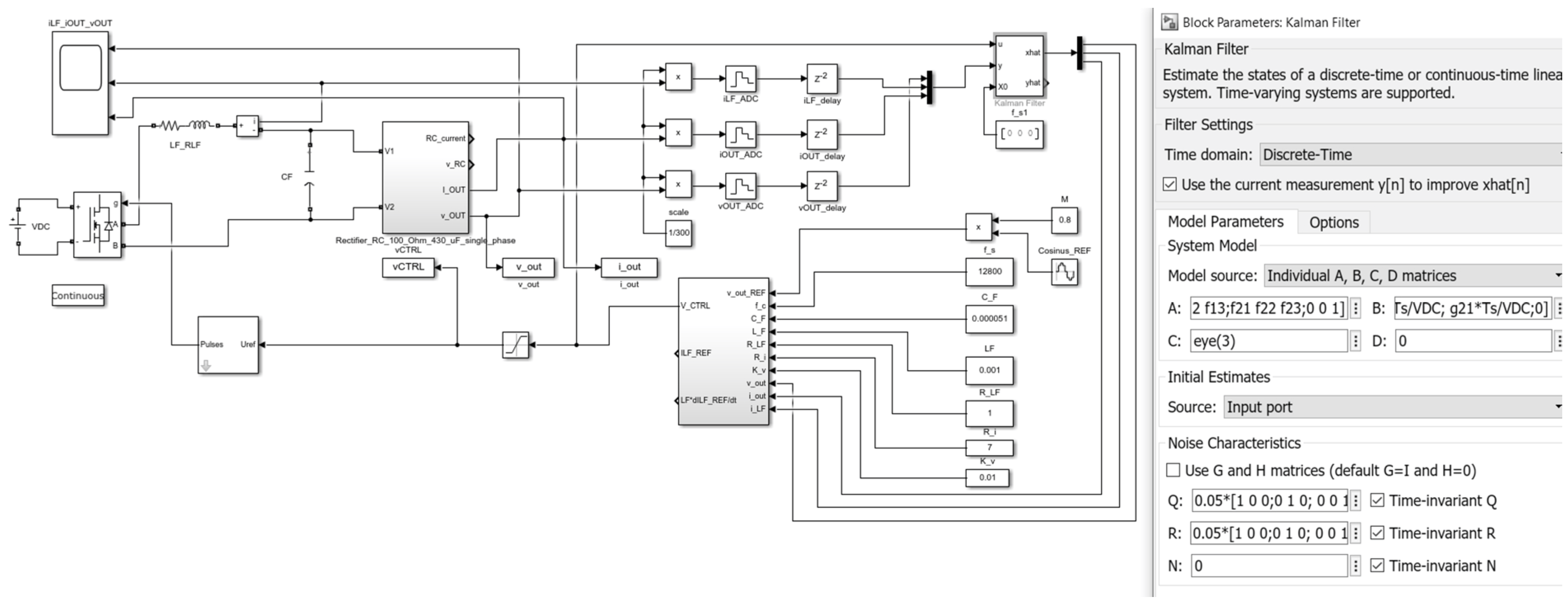
7. Simulation of the Low Switching Frequency VSI Control with the Linear Kalman Filter
- Compute Pk+1/k using Pk/k, ADk and Qk (32).
- Compute Kk+1 using Pk+1/k (computed in step 1), Hk+1, and Rk+1 (34) and (35).
- Compute Pk+1/k+1 using Kk+1 (computed in step 2) and Pk+1/k (from step 1), (37).
- Compute successive values of xk+1/k+1 recursively using (36) the computed values of Kk+1 (from step 3), the given initial estimate x0 and the input data zk+1.
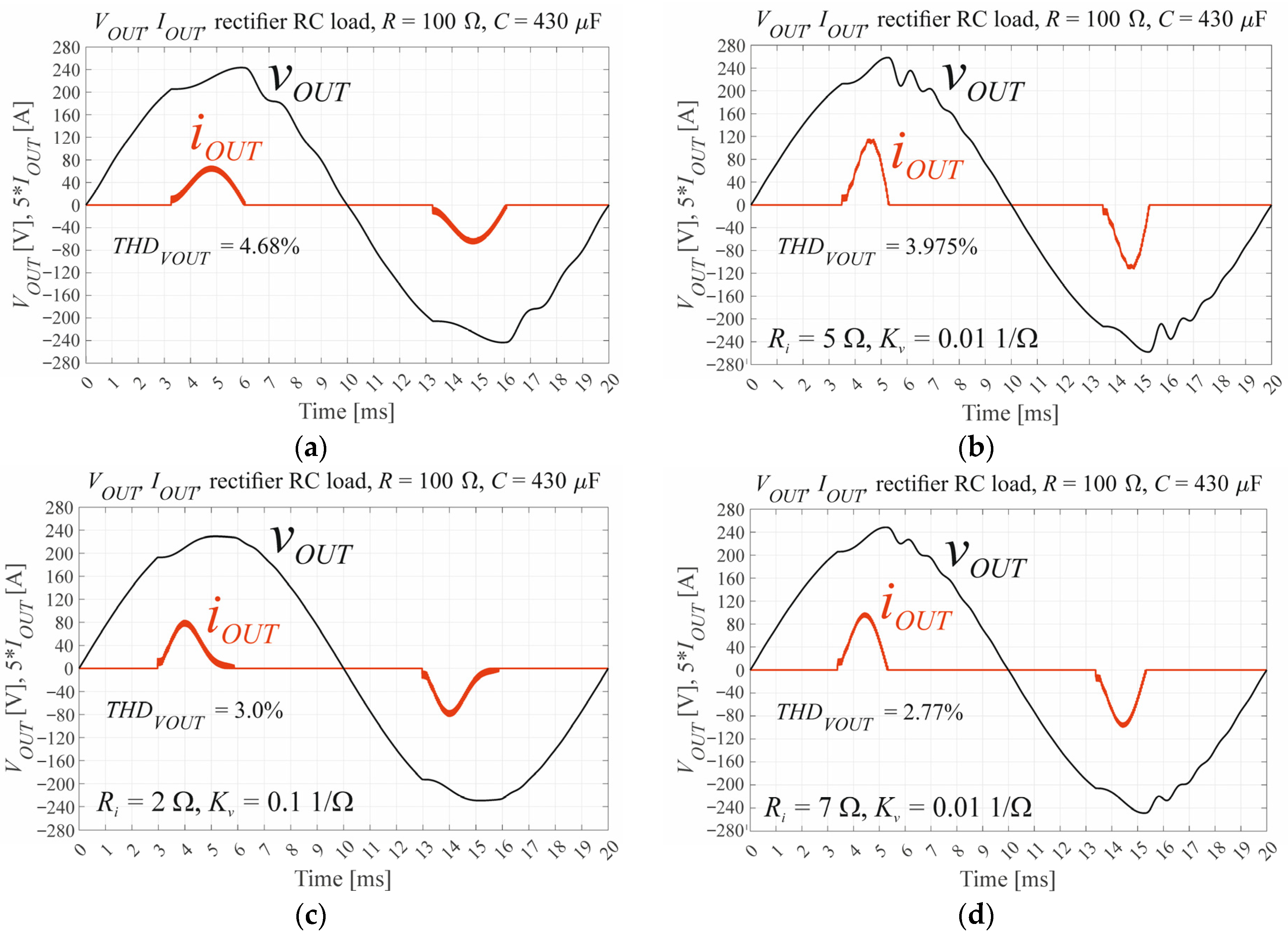
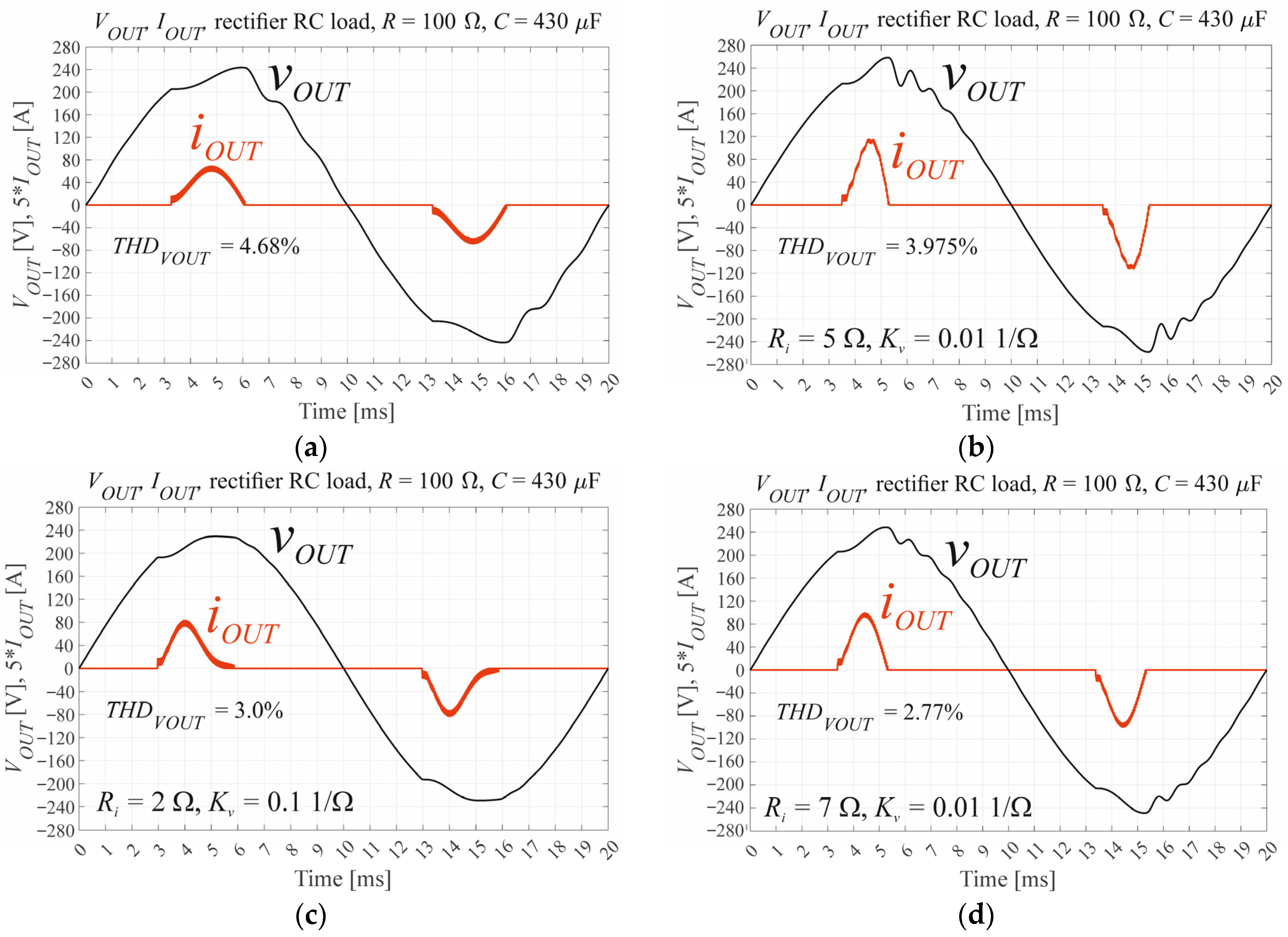
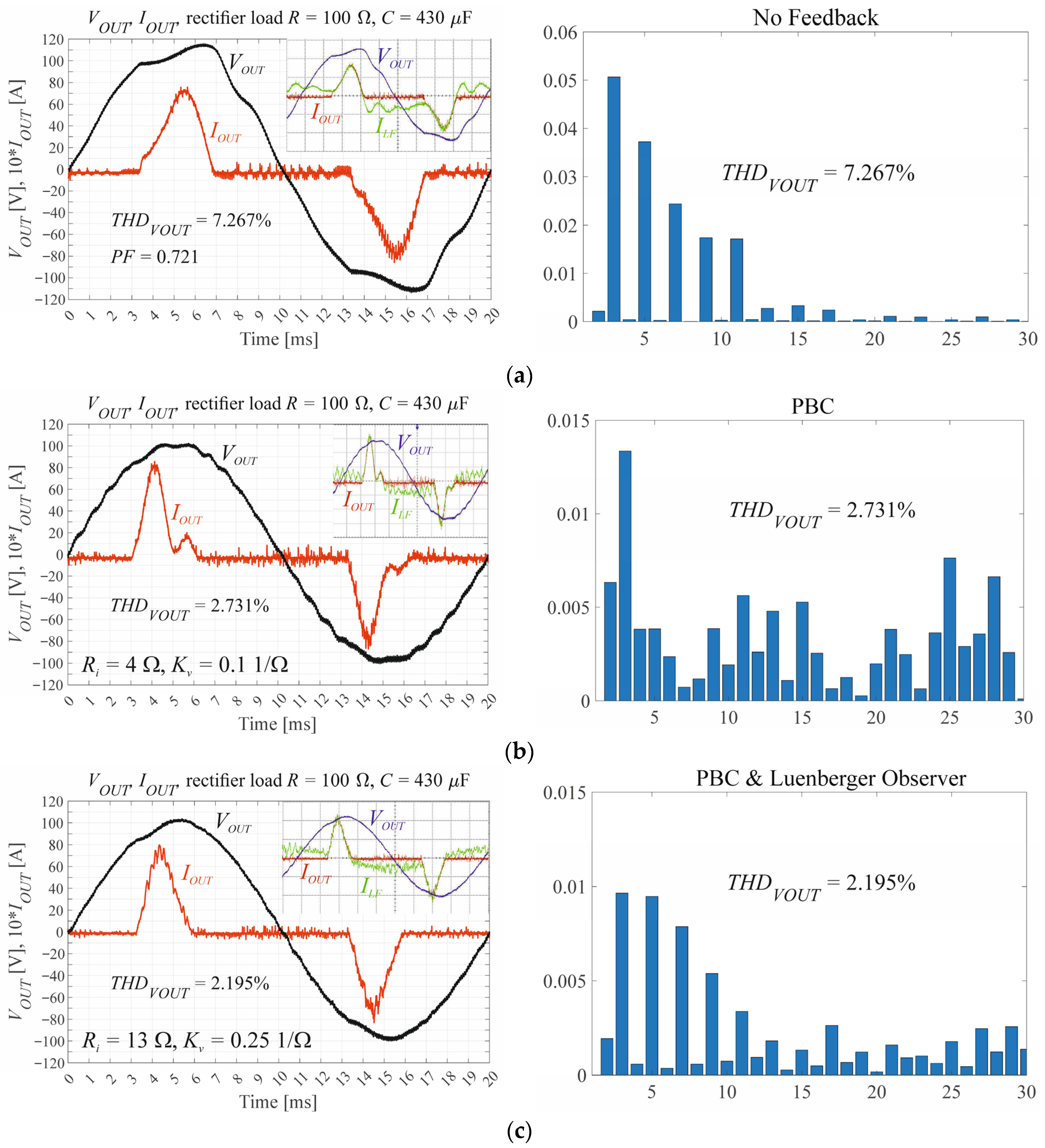
8. Comparison of the Simulation Results
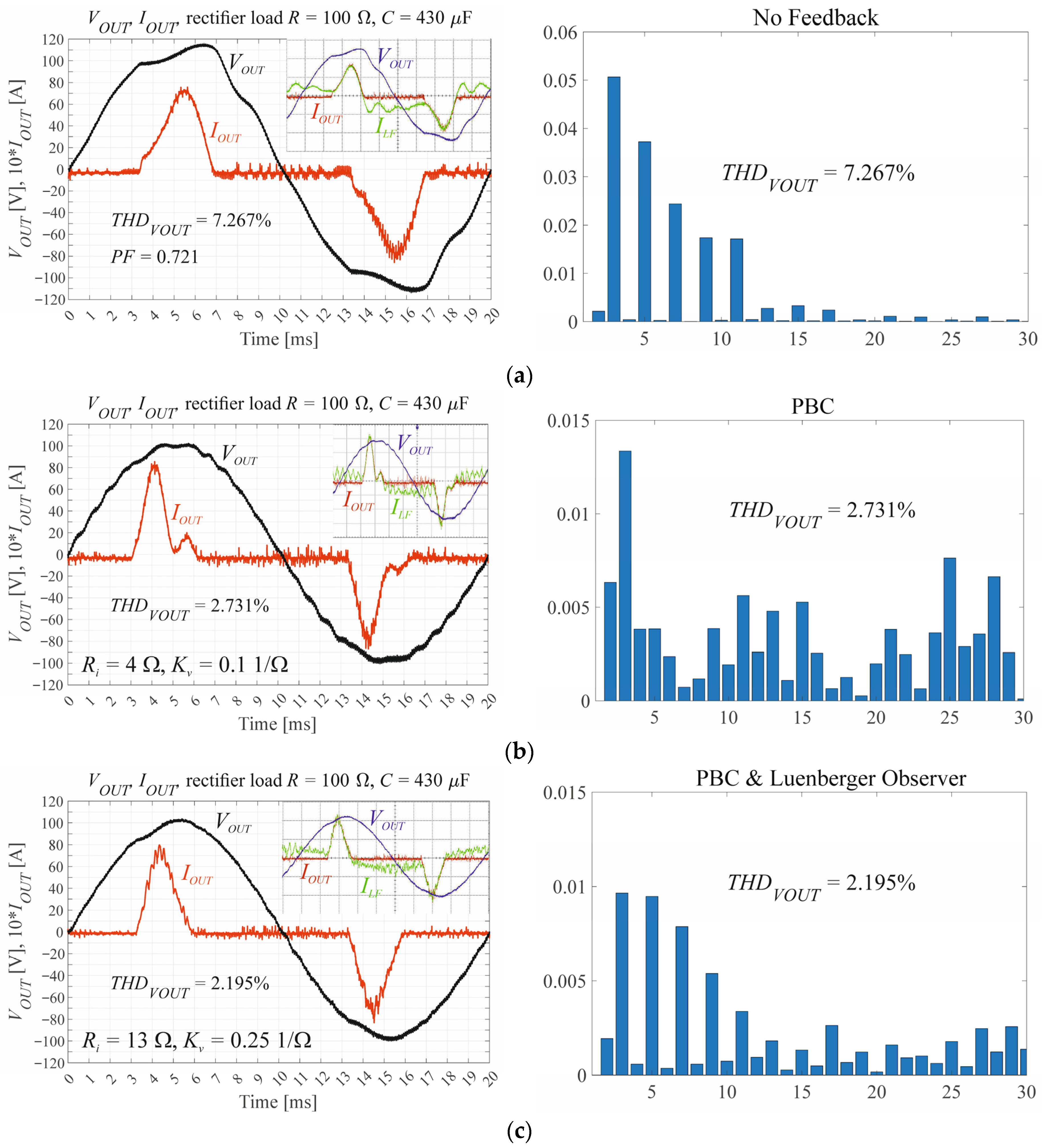
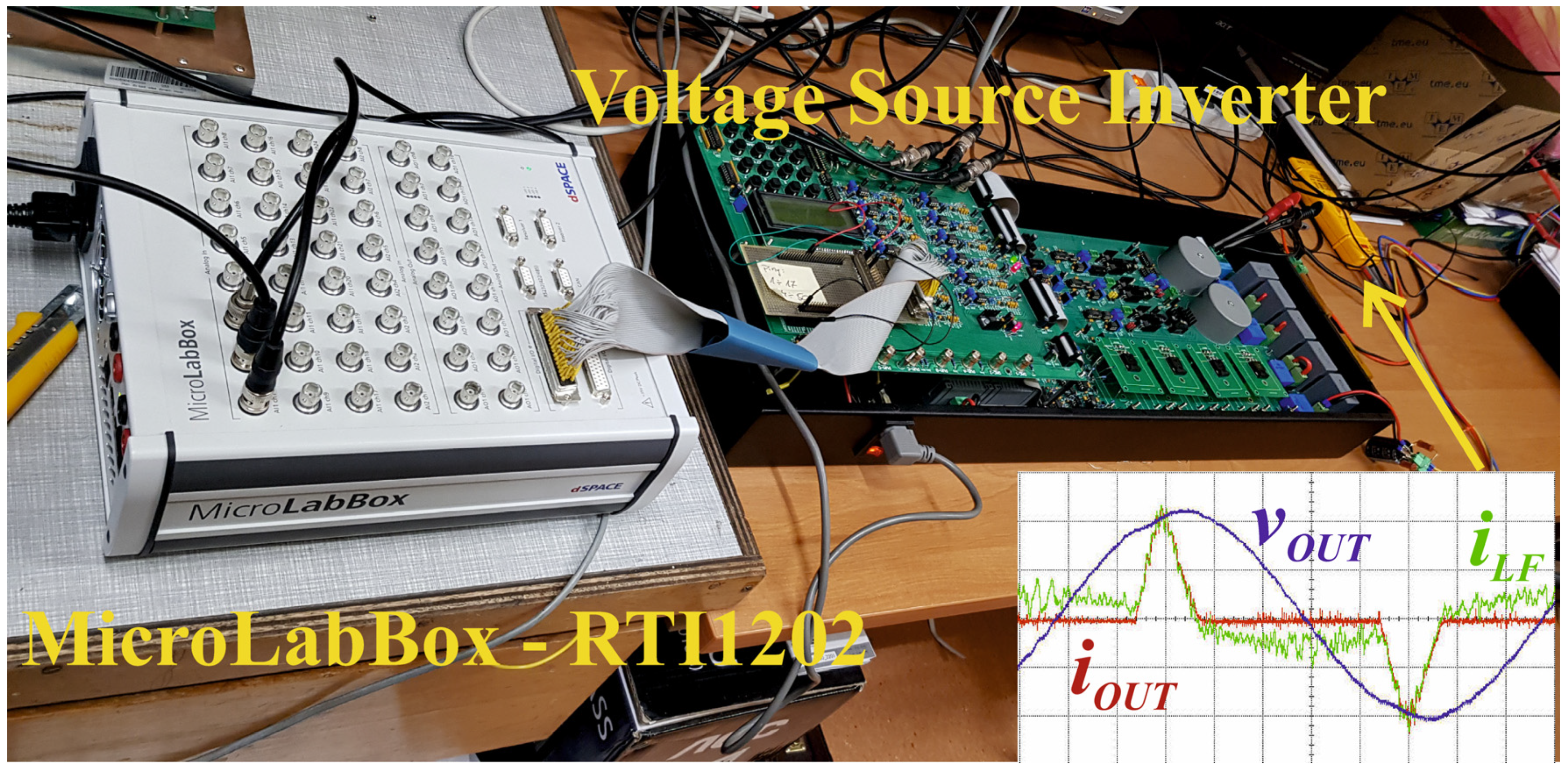
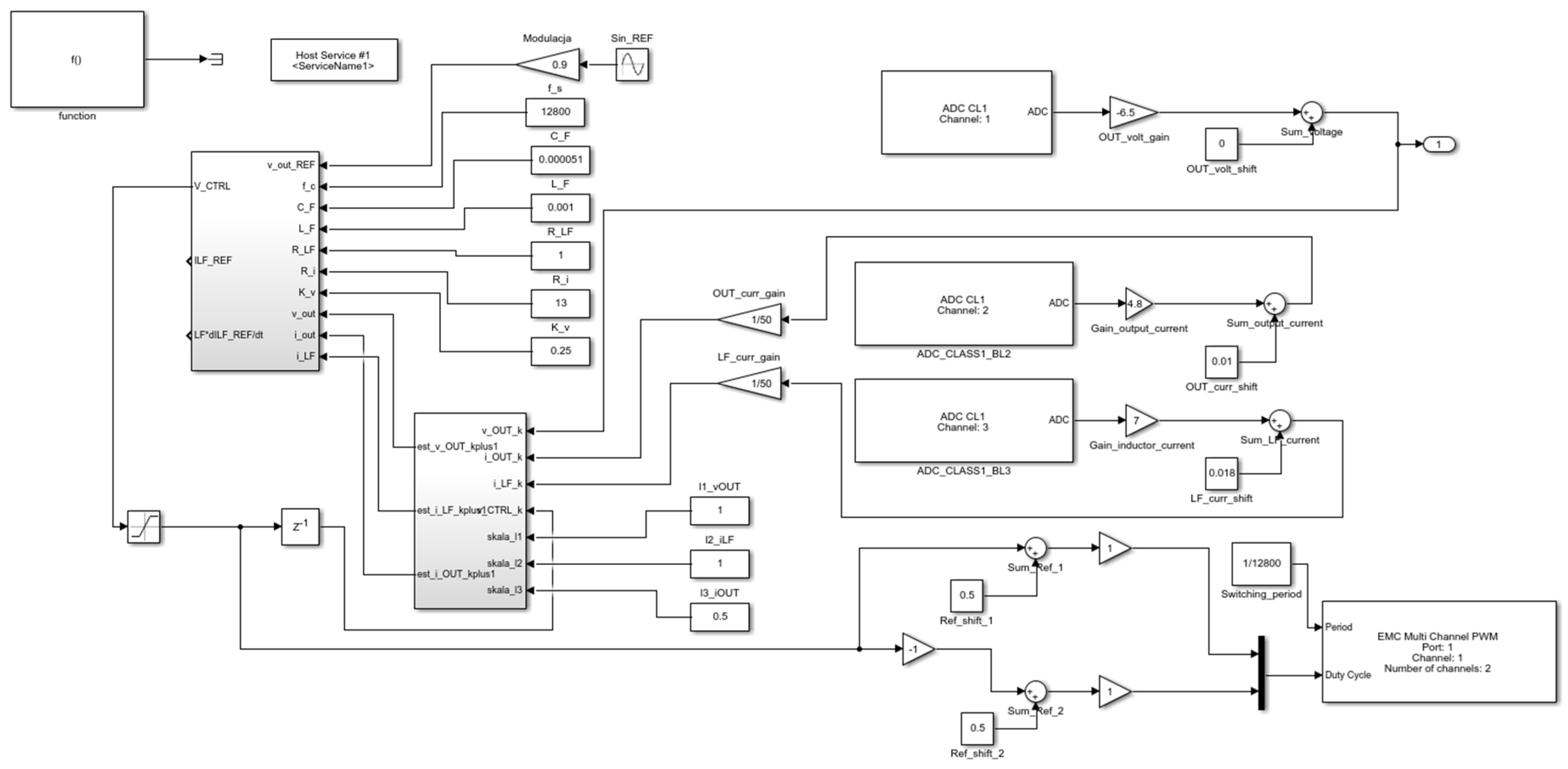
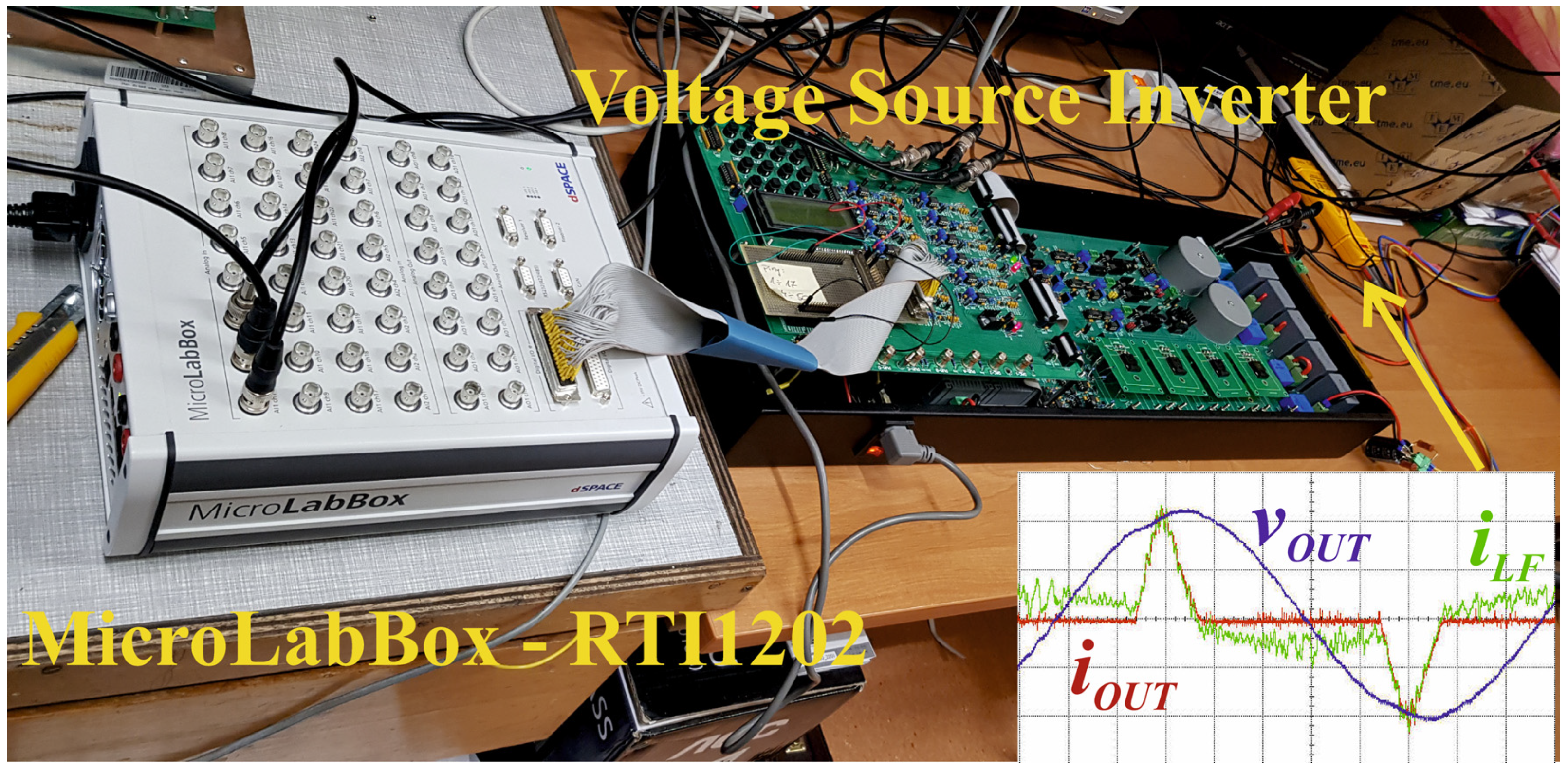
9. Breadboard Verifications of the Simulations
10. Results
11. Discussion
12. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IEC 62040-3:2021; Uninterruptible Power Systems (UPS)—Part 3: Method of Specifying the Performance and Test Requirements. IEC: Geneva, Switzerland, 2021.
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; Wiley-IEEE Press: New York, NY, USA, 2007. [Google Scholar]
- IEEE 519-2022; IEEE Standard for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 2022.
- Cheng, X.; Chen, Y.; Chen, X.; Zhang, B.; Qiu, D. An extended analytical approach for obtaining the steady-state periodic solutions of SPWM single-phase inverters. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 24 August 2017; pp. 1311–1316. [Google Scholar] [CrossRef]
- Cheng, Y.; Zha, X.; Liu, Y. Nonlinear modeling of inverter using the Hammerstein’s approach. In Proceedings of the INTELEC 2009—31st International Telecommunications Energy Conference, Incheon, Republic of Korea, 18–22 October 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Kawamura, A.; Chuarayapratip, R.; Haneyoshi, T. Deadbeat control of PWM inverter with modified pulse patterns for uninterruptible power supply. IEEE Trans. Ind. Electron. 1988, 35, 295–300. [Google Scholar] [CrossRef]
- Blachuta, M.; Rymarski, Z.; Bieda, R.; Bernacki, K.; Grygiel, R. Continuous-time approach to discrete-time PID Control for UPS inverters—A case study. In Proceedings of the Asian Conference on Intelligent Information and Database Systems (ACIIDS), Phuket, Thailand, 23–26 March 2020; pp. 1–12. [Google Scholar]
- Ben-Brahim, L.; Yokoyama, T.; Kawamura, A. Digital control for UPS inverters. In Proceedings of the Fifth International Conference on Power Electronics and Drive Systems (PEDS 2003), Singapore, 17–20 November 2003; Volume 2, pp. 1252–1257. [Google Scholar]
- Deng, H.; Srinivasan, D.; Oruganti, R. Modeling and control of single-phase UPS inverters: A survey. In Proceedings of the International Conference on Power Electronics and Drives Systems (PEDS 2005), Kuala Lumpur, Malaysia, 28 November–1 December 2005; pp. 848–853. [Google Scholar]
- Dou, X.; Yang, K.; Quan, X.; Hu, Q.; Wu, Z.; Zhao, B.; Li, P.; Zhang, S.; Jiao, Y. An Optimal PR Control Strategy with Load Current Observer for a Three-Phase Voltage Source Inverter. Energies 2015, 8, 7542–7562. [Google Scholar] [CrossRef]
- Borsalani, J.; Dastfan, A. Decoupled phase voltages control of three phase four-leg voltage source inverter via state feedback. In Proceedings of the 2012 2nd International eConference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 18–19 October 2012; pp. 71–76. [Google Scholar] [CrossRef]
- Moon, S.; Choe, J.M.; Lai, J.S. Design of a state-space controller employing a deadbeat state observer for ups inverters. In Proceedings of the 2017 Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 24–26 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, C.; Wang, Y.; Luo, S.; Zhang, F. State-space model of an inverter-based micro-grid. In Proceedings of the 2018 3rd International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yilan, Taiwan, 22–25 April 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Rymarski, Z. The discrete model of the power stage of the voltage source inverter for UPS. Int. J. Electron. 2011, 98, 1291–1304. [Google Scholar] [CrossRef]
- Rymarski, Z.; Bernacki, K. Different approaches to modelling single-phase voltage source inverters for uninterruptible power supply systems. IET Power Electron. 2016, 9, 1513–1520. [Google Scholar] [CrossRef]
- Rymarski, Z.; Bernacki, K. Different Features of Control Systems for Single-Phase Voltage Source Inverters. Energies 2020, 13, 4100. [Google Scholar] [CrossRef]
- Rymarski, Z. Simple Discrete Control of a Single-Phase Voltage Source Inverter in a UPS System for Low Switching Frequency. Energies 2023, 16, 5717. [Google Scholar] [CrossRef]
- Ortega, R.; Perez, J.A.L.; Nicklasson, P.J.; Sira-Ramirez, H. Passivity-Based Control of Euler-Lagrange Systems: Mechanical, Electrical and Electromechanical Applications (Communications and Control Engineering); Springer: London, UK, 1998. [Google Scholar]
- Wang, Z.; Goldsmith, P. Modified energy-balancing-based control for the tracking problem. IET Control Theory Appl. 2008, 2, 310–312. [Google Scholar] [CrossRef]
- Ortega, R.; Garcia-Canseco, E. Interconnection and Damping Assignment Passivity-Based Control: A Survey. Eur. J. Control 2004, 5, 432–450. [Google Scholar] [CrossRef]
- Ortega, R.; Garcia-Canseco, E. Interconnection and Damping Assignment Passivity-Based Control: Towards a Constructive Procedure—Part I. In Proceedings of the 43rd IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; pp. 3412–3417. [Google Scholar] [CrossRef]
- Ortega, R.; Espinosa-Perez, G. Passivity-based control with simultaneous energy-shaping and damping injection: The induction motor case study. IFAC Proc. Vol. 2005, 38, 477–482. [Google Scholar] [CrossRef]
- Komurcugil, H. Improved passivity-based control method and its robustness analysis for single-phase uninterruptible power supply inverters. IET Power Electron. 2015, 8, 1558–1570. [Google Scholar] [CrossRef]
- Serra, F.M.; De Angelo, C.H.; Forchetti, D.G. IDA-PBC control of a DC-AC converter for sinusoidal three-phase voltage generation. Int. J. Electron. 2017, 104, 93–110. [Google Scholar] [CrossRef]
- Khefifi, N.; Houari, A.; Ait-Ahmed, M.; Machmoum, M.; Ghanes, M. Robust IDA-PBC based Load Voltage Controller for Power Quality Enhancement of Standalone Microgrids. In Proceedings of the IEEE IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 249–254. [Google Scholar] [CrossRef]
- Ali, M.S.; Hou, Z.K.; Noori, M.N. Stability and performance of feedback control systems with time delays. Comput. Struct. 1998, 66, 241–248. [Google Scholar] [CrossRef]
- Mousa-Abadian, M.; Momeni-Masuleh, S.H.; Haeri, M. Stabilization of linear time-delayed systems by delayed feedback. Comput. Methods Differ. Equ. 2019, 7, 302–318. Available online: https://cmde.tabrizu.ac.ir/article_8553.html (accessed on 9 April 2024).
- Deng, Y.; Léchappé, V.; Moulay, E.; Chen, Z.; Liang, B.; Plestan, F.; Han, Q.L. Predictor-based control of time-delay systems: A survey. Int. J. Syst. Sci. 2022, 53, 2496–2534. [Google Scholar] [CrossRef]
- Gomez, M.; You, S.; Murray, R.M.; Time-Delayed Feedback Channel Design: Discrete Time H∞ Approach. 2014 American Control Conference (ACC). Available online: http://www.cds.caltech.edu/~murray/papers/gym14-acc.html (accessed on 10 March 2024).
- Sipahi, R.; Niculescu, S.I.; Abdallah, C.; Michiels, W.; Gu, K. Stability and Stabilization of Systems with Time Delay. IEEE Control Syst. Mag. 2011, 31, 38–65. [Google Scholar] [CrossRef]
- Van der Broeck, H.W.; Miller, M. Harmonics in DC to AC converters of single-phase uninterruptible power supplies. In Proceedings of the 17th International Telecommunications Energy Conference 1995 (INTELEC’ 95), The Hague, The Netherlands, 29 October–1 November 1995; pp. 653–658. [Google Scholar]
- Dahono, P.A.; Purwadi, A.; Qamaruzzaman. An LC filter design method for single-phase PWM inverters. In Proceedings of the International Conference on Power Electronics and Drive System, Singapore, 21–24 February 1995; Volume 2, pp. 571–576. [Google Scholar]
- Kim, J.; Choi, J.; Hong, H. Output LC filter design of voltage source inverter considering the performance of controller. In Proceedings of the International Conference on Power System Technology, Perth, WA, Australia, 4–7 December 2000; Volume 3, pp. 1659–1664. [Google Scholar]
- Ryu, B.; Kim, J.; Choi, J.; Choi, C. Design and analysis of output filter for 3-phase UPS inverter. In Proceedings of the Power Conversion Conference, Osaka, Japan, 2–5 April 2002; Volume 3, pp. 941–946. [Google Scholar]
- Film Capacitors, General Technical Information, June 2018, TDK. Available online: https://www.tdk-electronics.tdk.com/download/530754/480aeb04c789e45ef5bb9681513474ba/pdf-generaltechnicalinformation.pdf (accessed on 10 March 2024).
- Film Capacitors, Metallized Polypropylene Film Capacitors (MKP), June 2018, TDK. Available online: https://www.tdk-electronics.tdk.com/download/530784/62611300653ac1ee6053a0b5b4b5c37c/pdf-mkpoverview.pdf (accessed on 10 March 2024).
- Micrometals Alloy Powder Core Catalog. 2021. Available online: https://www.micrometals.com/design-and-applications/literature/ (accessed on 10 March 2024).
- Bernacki, K.; Rymarski, Z.; Dyga, Ł. Selecting the coil core powder material for the output filter of a voltage source inverter. Electron. Lett. 2017, 53, 1068–1069. [Google Scholar] [CrossRef]
- Bertotti, G. General properties of power losses in soft ferromagnetic materials. IEEE Trans. Magn. 1988, 24, 621–630. [Google Scholar] [CrossRef]
- Rymarski, Z. Measuring the real parameters of single-phase voltage source inverters for UPS systems. Int. J. Electron. 2017, 104, 1020–1033. [Google Scholar] [CrossRef]
- Bernacki, K.; Rymarski, Z. A Contemporary Design Process for Single-Phase Voltage Source Inverter Control Systems. Sensors 2022, 22, 7211. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observing the state of a linear system. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Luenberger, D.G. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Davis, J.H. Luenberger Observers. In Foundations of Deterministic and Stochastic Control. Systems & Control: Foundations & Applications; Birkhäuser: Boston, MA, USA, 2002; pp. 245–254. [Google Scholar] [CrossRef]
- Montagner, V.F.; Carati, E.G.; Grundling, H.A. An adaptive linear quadratic regulator with repetitive controller applied to uninterruptible power supplies. In Proceedings of the Industry Applications Conference 2000, Rome, Italy, 8–12 October 2000; Volume 4, pp. 2231–2236. [Google Scholar]
- Saoudi, M.; Hani, B.; Aissa, C. Efficient Deadbeat Control of Single-Phase Inverter with Observer for High Performance Applications. Prz. Elektrotechniczny 2023, 99, 237. [Google Scholar] [CrossRef]
- Fan, H.; Li, Z.; Rodriguez, J.; Wang, B. Model Free Predictive Current Control for Voltage Source Inverter using Luenberger Observer. In Proceedings of the 2023 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Wuhan, China, 16–19 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Heydaridoostabad, H.; Ghazi, R. A new approach to design an observer for load current of UPS based on Fourier series theory in model predictive control system. Int. J. Electr. Power Energy Syst. 2018, 104, 898–909. [Google Scholar] [CrossRef]
- Kalman, R.E. New methods and results in linear prediction and filtering theory. In Proceedings of the Symposium on Engineering Applications of Random Function Theory and Probability; Bogdanoff, J.L., Kozin, F., Eds.; Wiley: New York, NY, USA, 1961; pp. 270–388. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering. Theory and Practice Using MATLAB; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems, 2nd ed.; Addison-Wesley: New York, NY, USA, 1990. [Google Scholar]
- Dróżdż, K. Identification of mechanical parameters of the two-mass system using fuzzy Kalman filter. In Scientific Papers of The Institute of Electrical Machines, Drives and Measurements of the Wrocław University of Science and Technology Series: Studies and Research; Wrocław University of Science and Technology: Wrocław, Poland, 2013; Volume 69, pp. 156–169. ISSN 1733-0718. [Google Scholar]
- Chen, B.; Wu, W.; NGao Yao, Z.; Chung, H.; Blaabjerg, F. Kalman-Filter-Estimation Based Sliding Mode Control of Three-Phase LCL-Filtered Grid-Tied Inverter Using only Grid-Injected Current Sensors. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 2368–2373. [Google Scholar] [CrossRef]
- Gao, C. A New Control Method with Simplified Model and Kalman Filter Estimator for Grid-Tied Inverter with Asymmetric LCL Filter. Authorea 2023. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation VSI Rimax, Kvmax | Simulation VSI THDVOUT | Experimental Rimax, Kvmax | Experimental VSI THDVOUT | |
|---|---|---|---|---|
| No feedback | none | 4.68% | none | 7.27% |
| PBC controller | Rimax = 5, Kvmax = 0.01 | 3.98% | Rimax = 4, Kvmax = 0.1 | 2.73% |
| PBC controller with the full-state Luenberger observer | Rimax = 2, Kvmax = 0.1, l1 = 1, l2 = 1, l3 = 0.5 | 3.0% | Rimax = 13, Kvmax = 0.25, l1 = 1, l2 = 1, l3 = 0.5 | 2.20% |
| PBC controller with the linear Kalman filter | Rimax = 7, Kvmax = 0.01 | 2.77% | not used | not checked |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rymarski, Z. Improving Low-Frequency Digital Control in the Voltage Source Inverter for the UPS System. Electronics 2024, 13, 1469. https://doi.org/10.3390/electronics13081469
Rymarski Z. Improving Low-Frequency Digital Control in the Voltage Source Inverter for the UPS System. Electronics. 2024; 13(8):1469. https://doi.org/10.3390/electronics13081469
Chicago/Turabian StyleRymarski, Zbigniew. 2024. "Improving Low-Frequency Digital Control in the Voltage Source Inverter for the UPS System" Electronics 13, no. 8: 1469. https://doi.org/10.3390/electronics13081469
APA StyleRymarski, Z. (2024). Improving Low-Frequency Digital Control in the Voltage Source Inverter for the UPS System. Electronics, 13(8), 1469. https://doi.org/10.3390/electronics13081469