

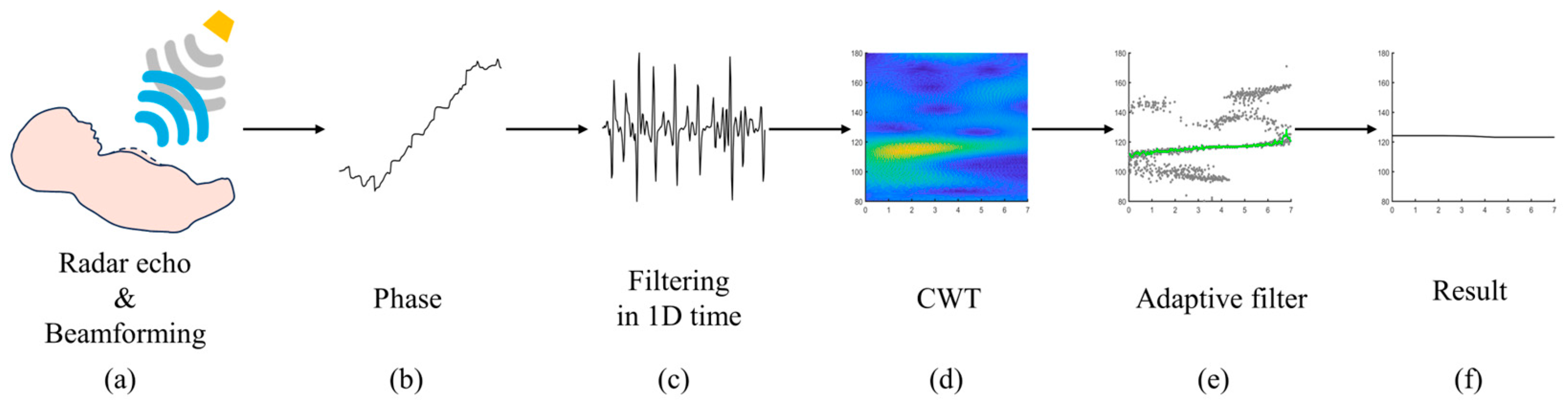
Random Body Movement Removal Using Adaptive Motion Artifact Filtering in mmWave Radar-Based Neonatal Heartbeat Sensing

 , and
, and 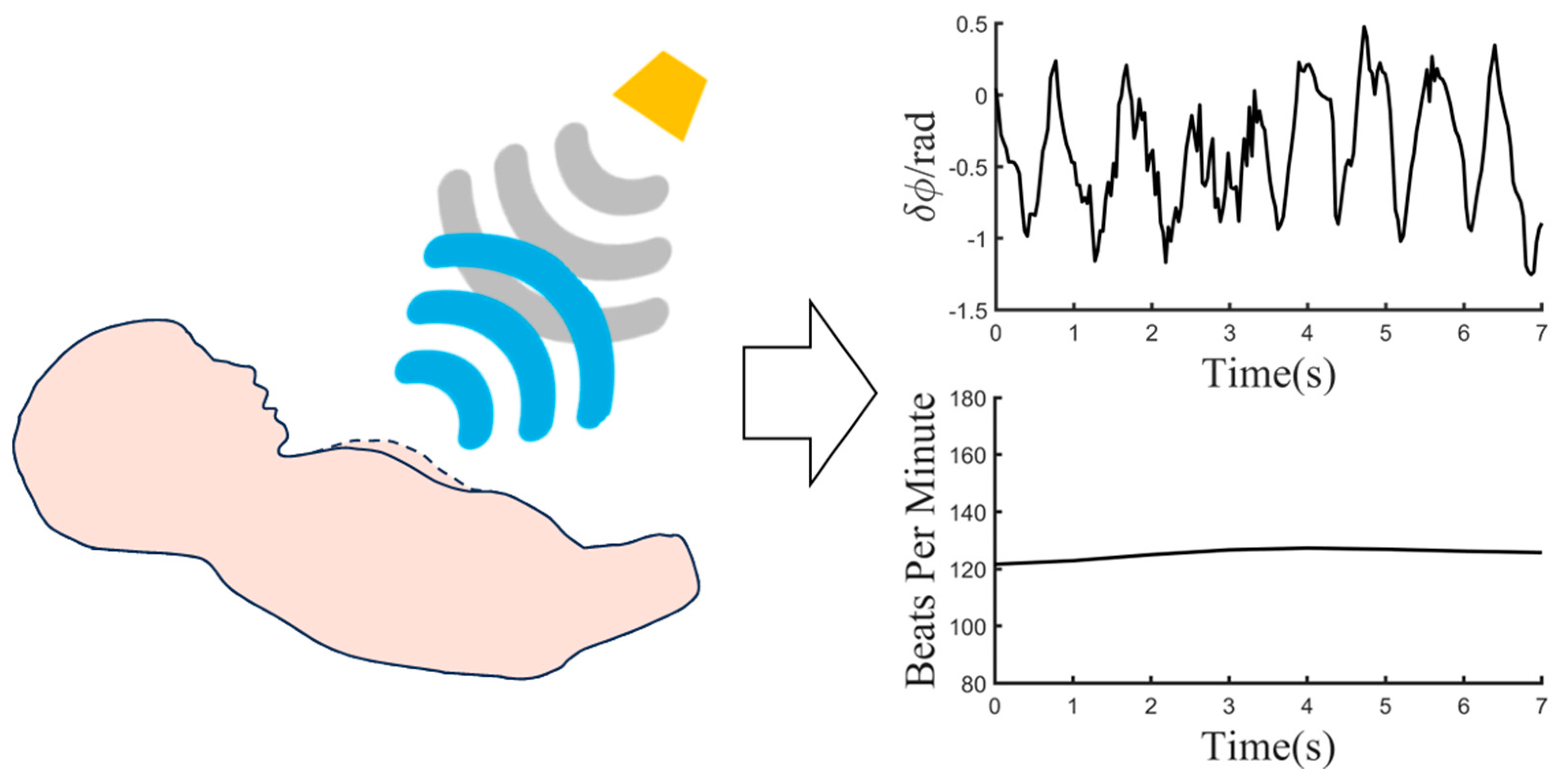{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Share and Cite
Yang, S.; Liang, X.; Dang, X.; Jiang, N.; Cao, J.; Zeng, Z.; Li, Y. Random Body Movement Removal Using Adaptive Motion Artifact Filtering in mmWave Radar-Based Neonatal Heartbeat Sensing. Electronics 2024, 13, 1471. https://doi.org/10.3390/electronics13081471
Yang S, Liang X, Dang X, Jiang N, Cao J, Zeng Z, Li Y. Random Body Movement Removal Using Adaptive Motion Artifact Filtering in mmWave Radar-Based Neonatal Heartbeat Sensing. Electronics. 2024; 13(8):1471. https://doi.org/10.3390/electronics13081471
Chicago/Turabian StyleYang, Shiguang, Xuerui Liang, Xiangwei Dang, Nanyi Jiang, Jiasheng Cao, Zhiyuan Zeng, and Yanlei Li. 2024. "Random Body Movement Removal Using Adaptive Motion Artifact Filtering in mmWave Radar-Based Neonatal Heartbeat Sensing" Electronics 13, no. 8: 1471. https://doi.org/10.3390/electronics13081471
APA StyleYang, S., Liang, X., Dang, X., Jiang, N., Cao, J., Zeng, Z., & Li, Y. (2024). Random Body Movement Removal Using Adaptive Motion Artifact Filtering in mmWave Radar-Based Neonatal Heartbeat Sensing. Electronics, 13(8), 1471. https://doi.org/10.3390/electronics13081471