
Robust Direct Power Control of Three-Phase PWM Rectifier with Mismatched Disturbances

Abstract
:1. Introduction
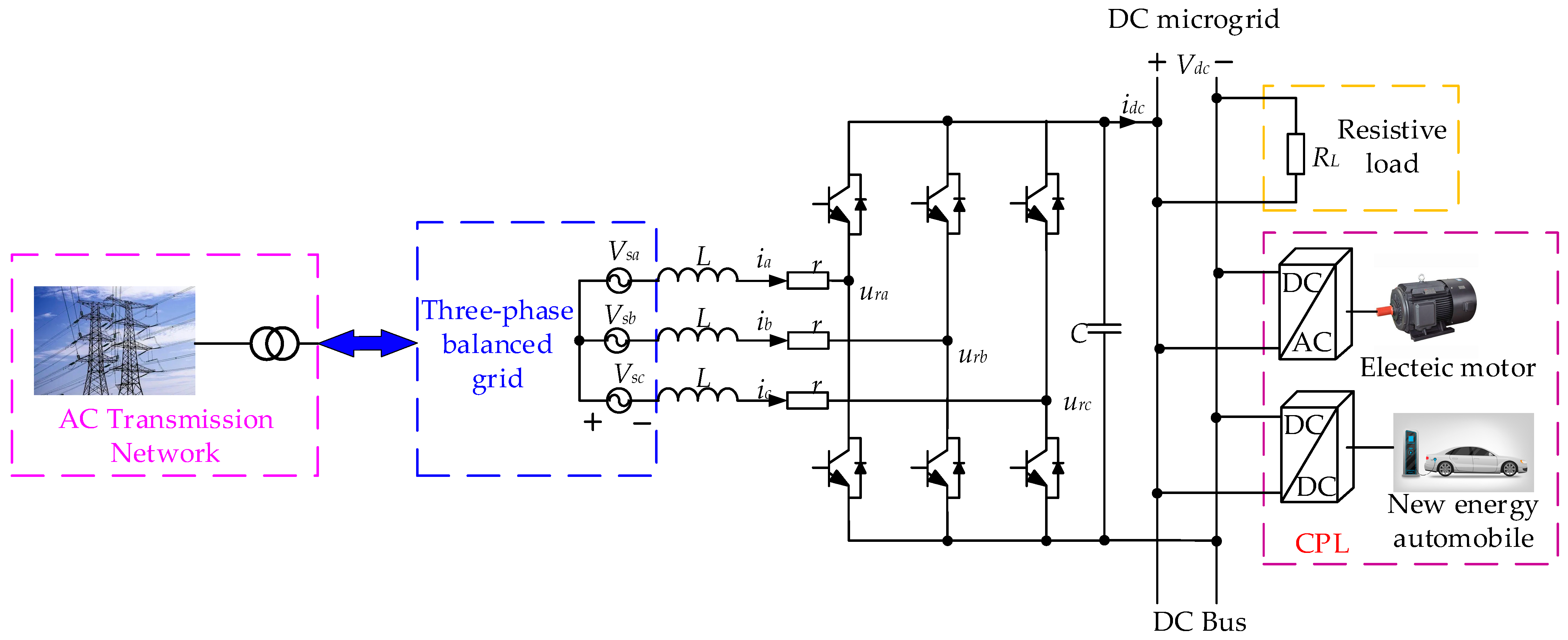
2. Nonlinear Power Model of Three-Phase PWM Rectifier
2.1. AC-Side Power Model
2.2. DC-Side Power Model
2.3. Nonlinear Power Model of Three-Phase PWM Rectifier
3. Exact Feedback Linearized Power Model with Matched and Mismatched Disturbances
3.1. AC-Side Exact Feedback Linearized Power Model
- 1.
- Near the equilibrium point, the rank of the matrix
- 2.
- The set of vector fields
3.2. Power Model with Matched and Mismatched Disturbances
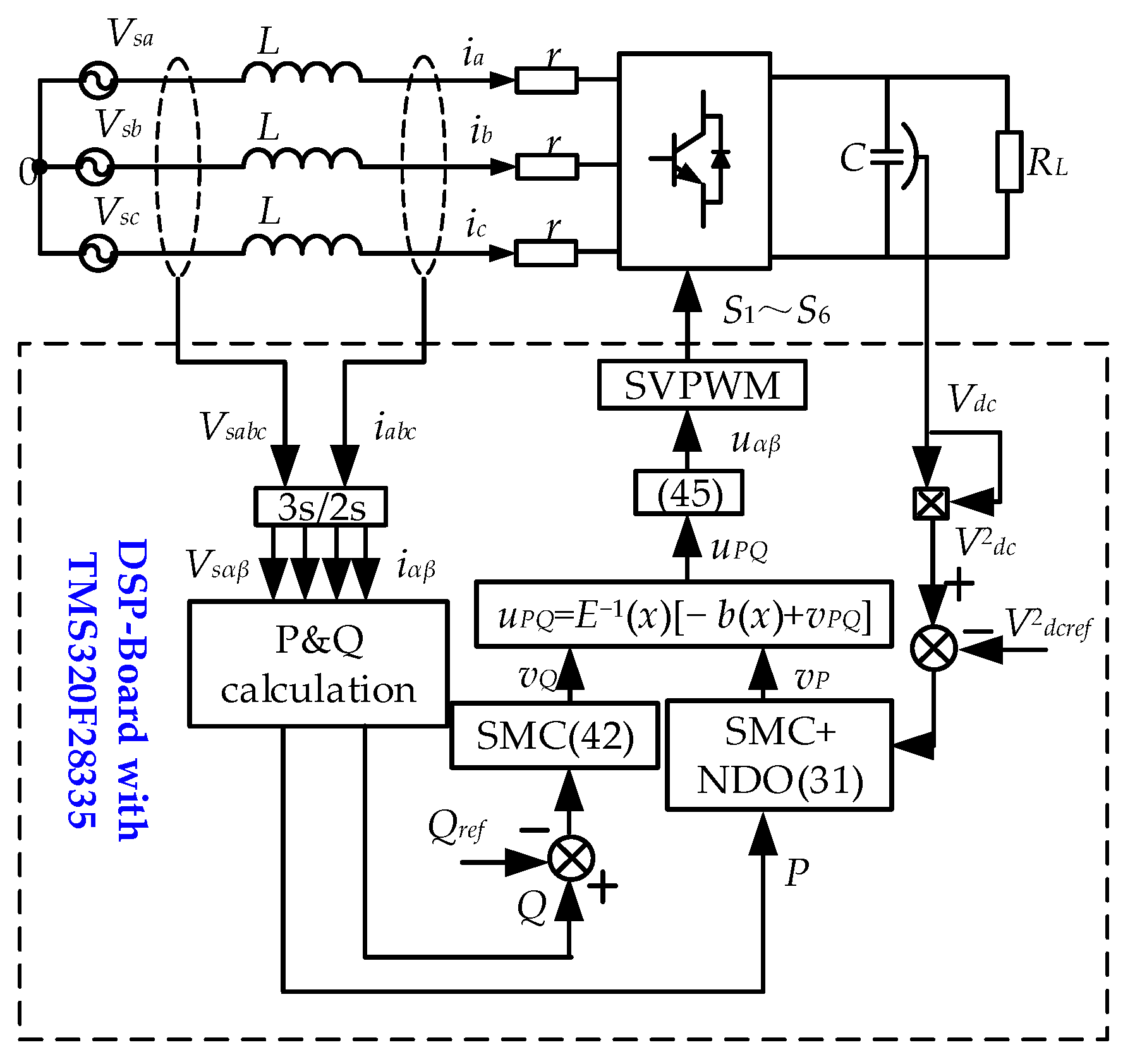
4. Design of Three-Phase PWM Rectifier Controller
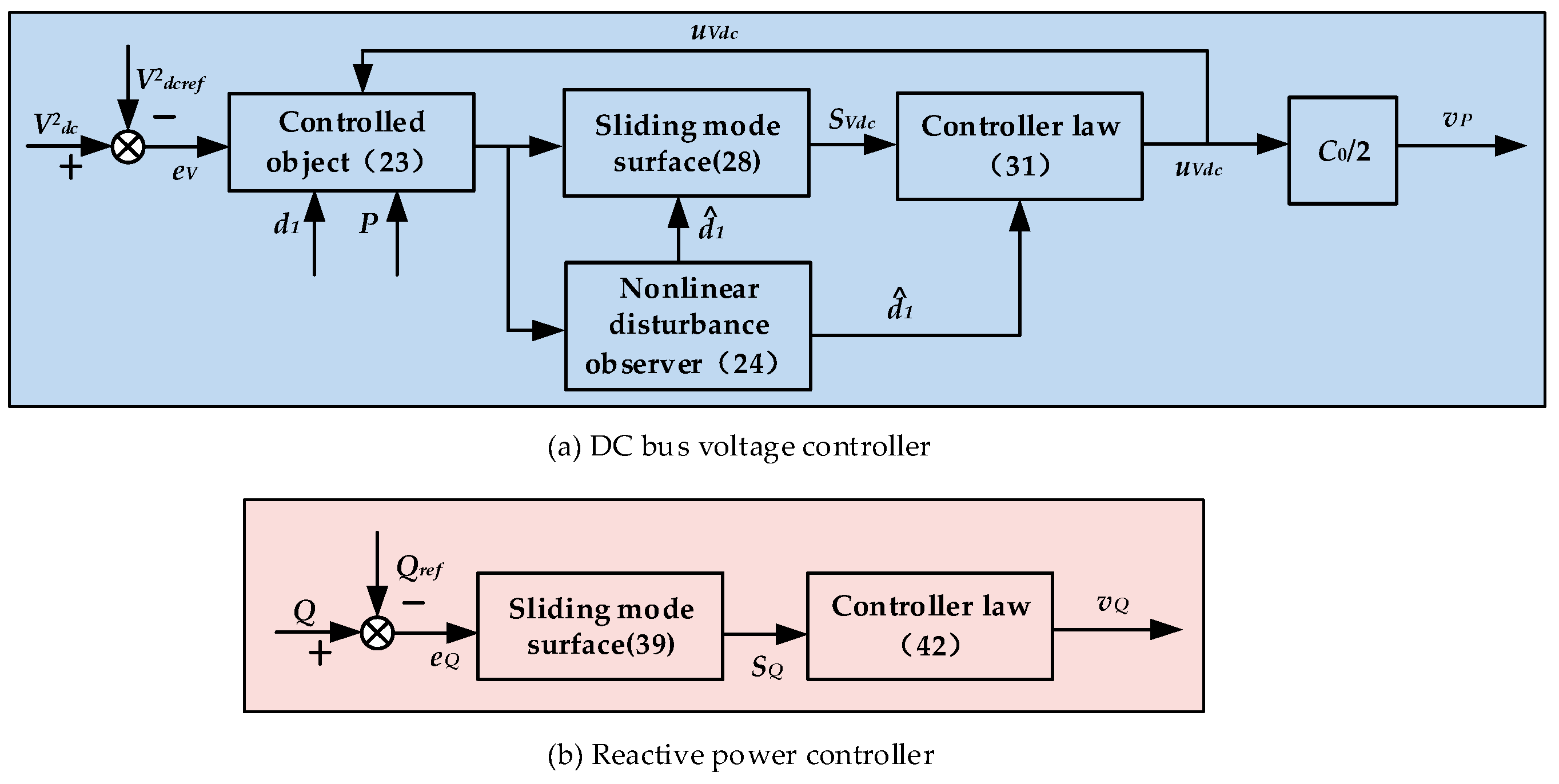
4.1. DC Bus Voltage Controller with SMC + NDO
4.1.1. The NDO
4.1.2. The SMC + NDO Controller
- 1.
- If the origin of an unmotivated system is globally exponentially stable, then the system is input-state stable (ISS).
- 2.
- If the system is ISS and satisfies , then there is .
4.2. Reactive Power Controller with SMC
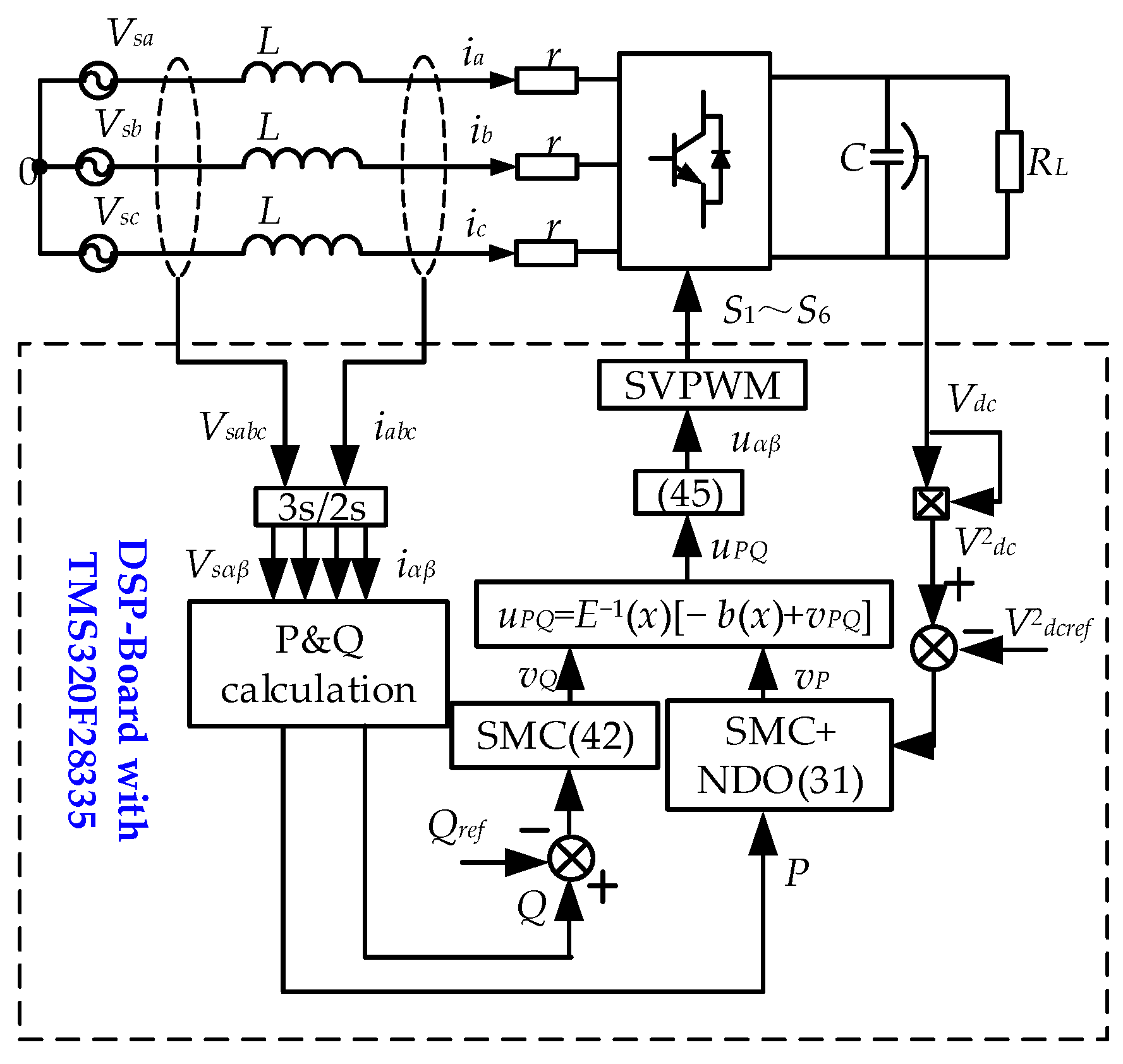
5. Simulation and Experimental Verification
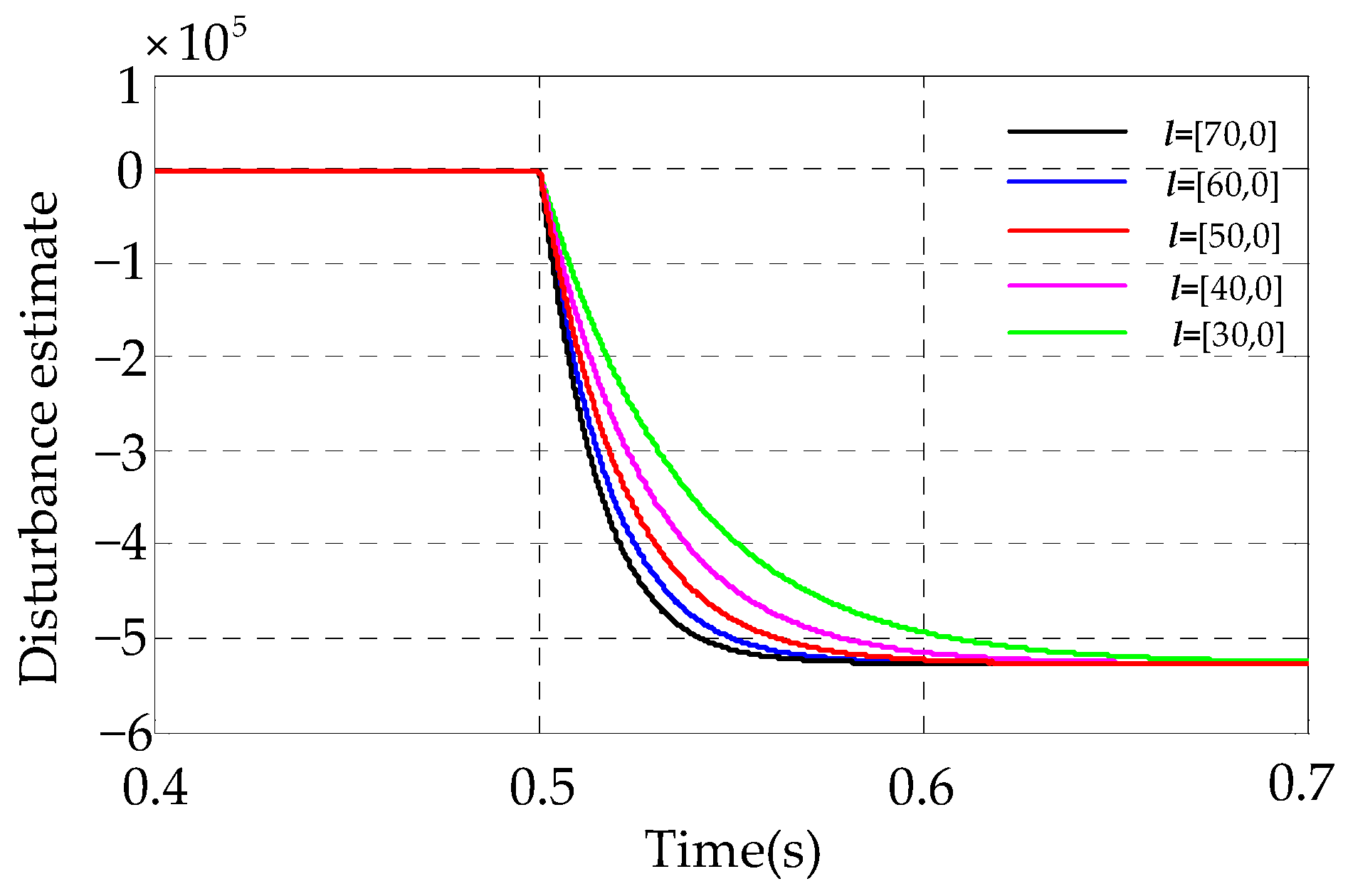
- The criterion for the rectification of the observer gain l: First, l must be within the defined range (l > 0). Second, it is observed from Equation (27) and Figure 6 that a larger l results in a faster convergence rate. However, it should be noted that a larger l will lead to a larger switching gain kVdc, as defined in Equation (32), which increases the chattering. Therefore, in actual engineering applications, it is important to avoid selecting extreme l. Furthermore, when l exceeds [50,0], the improvement in dynamic performance shown in Figure 6 is not significant, so we set the l value to [50,0];
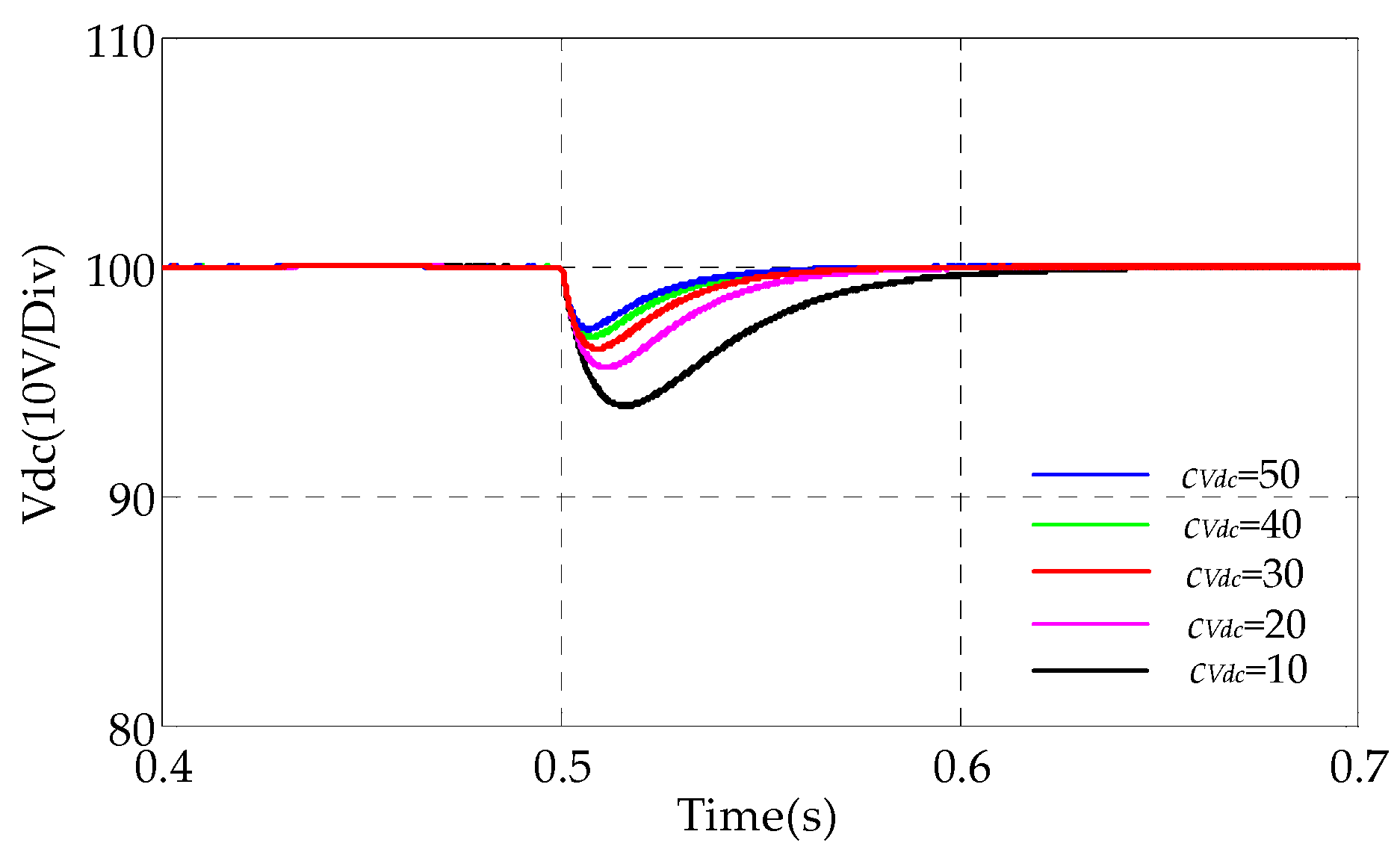
- The criterion for the rectification of the SMC parameter cvdc: First, cvdc is chosen to be within the defined range (cvdc > 0). Second, as shown in Figure 7, a larger cvdc results in faster convergence and smaller voltage drop. However, a larger cvdc will lead to a larger switching gain kVdc, as defined in Equation (32), which increases the chattering. Furthermore, when cvdc exceeds 30, the improvement in dynamic performance shown in Figure 7 is not significant, so we set cvdc value to 30;
- The criterion for the rectification of the switching gain kVdc, kQ, ρ1, and ρ2: Based on the selected l and cvdc, kVdc and kQ should be chosen within the defined in Equations (32) and (43). Furthermore, increasing ρ1 and ρ2 leads to a faster convergence rate. To reduce sliding-mode chattering, it is recommended to decrease kVdc and kQ.
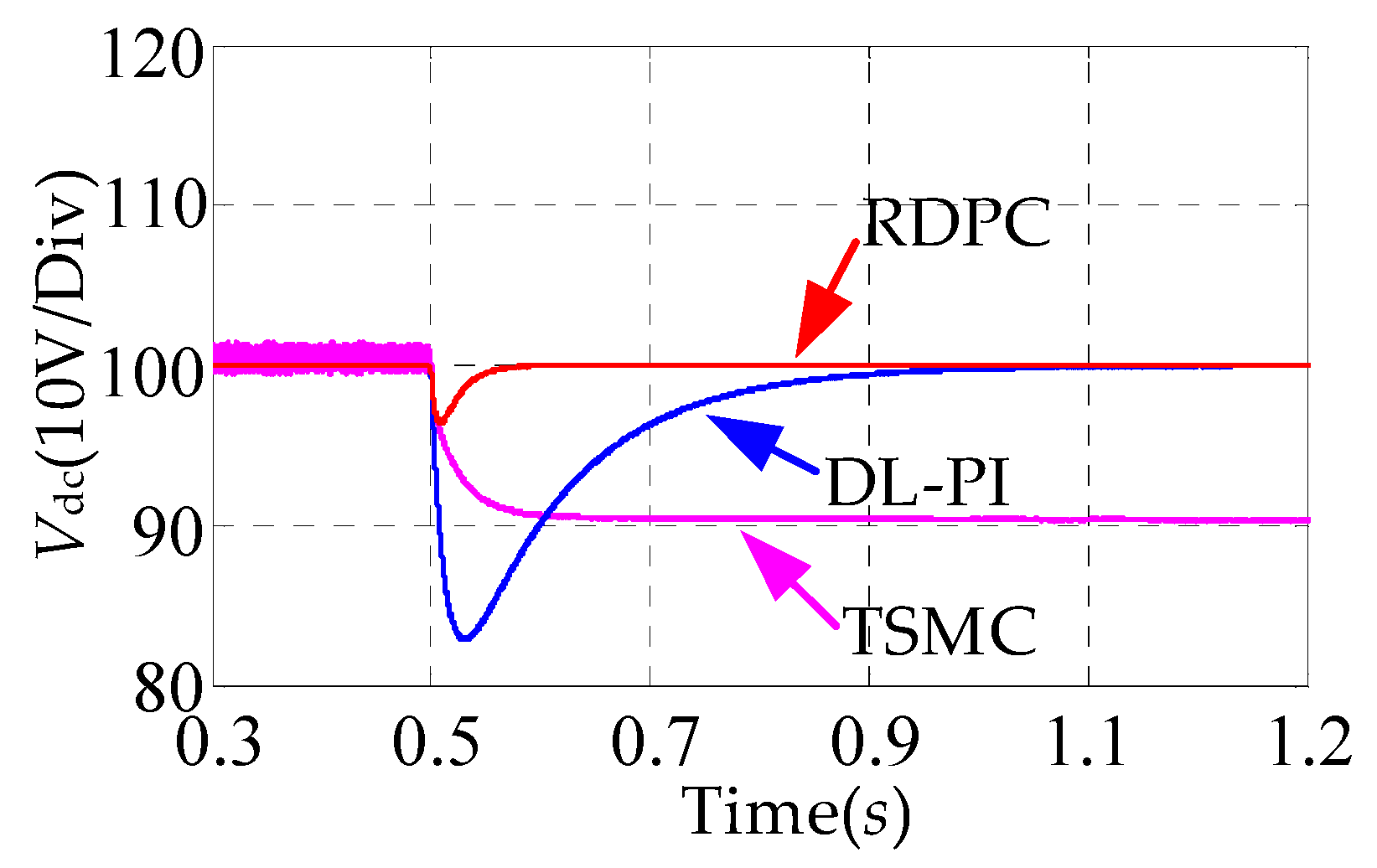
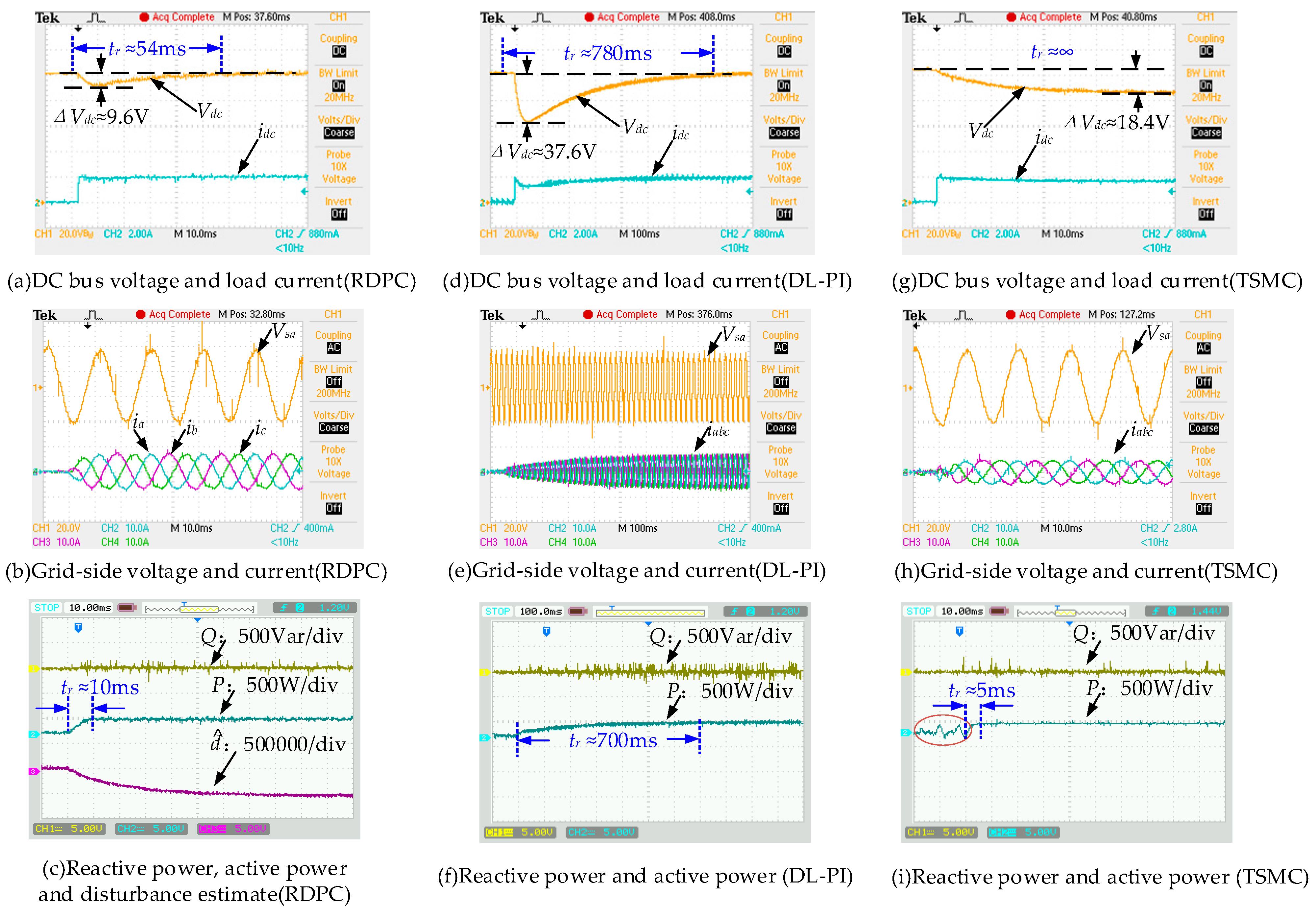
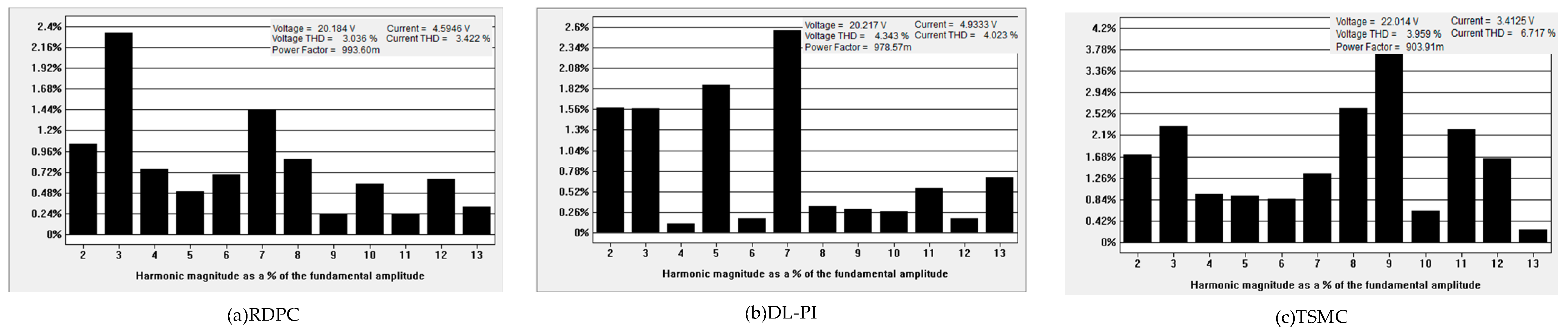
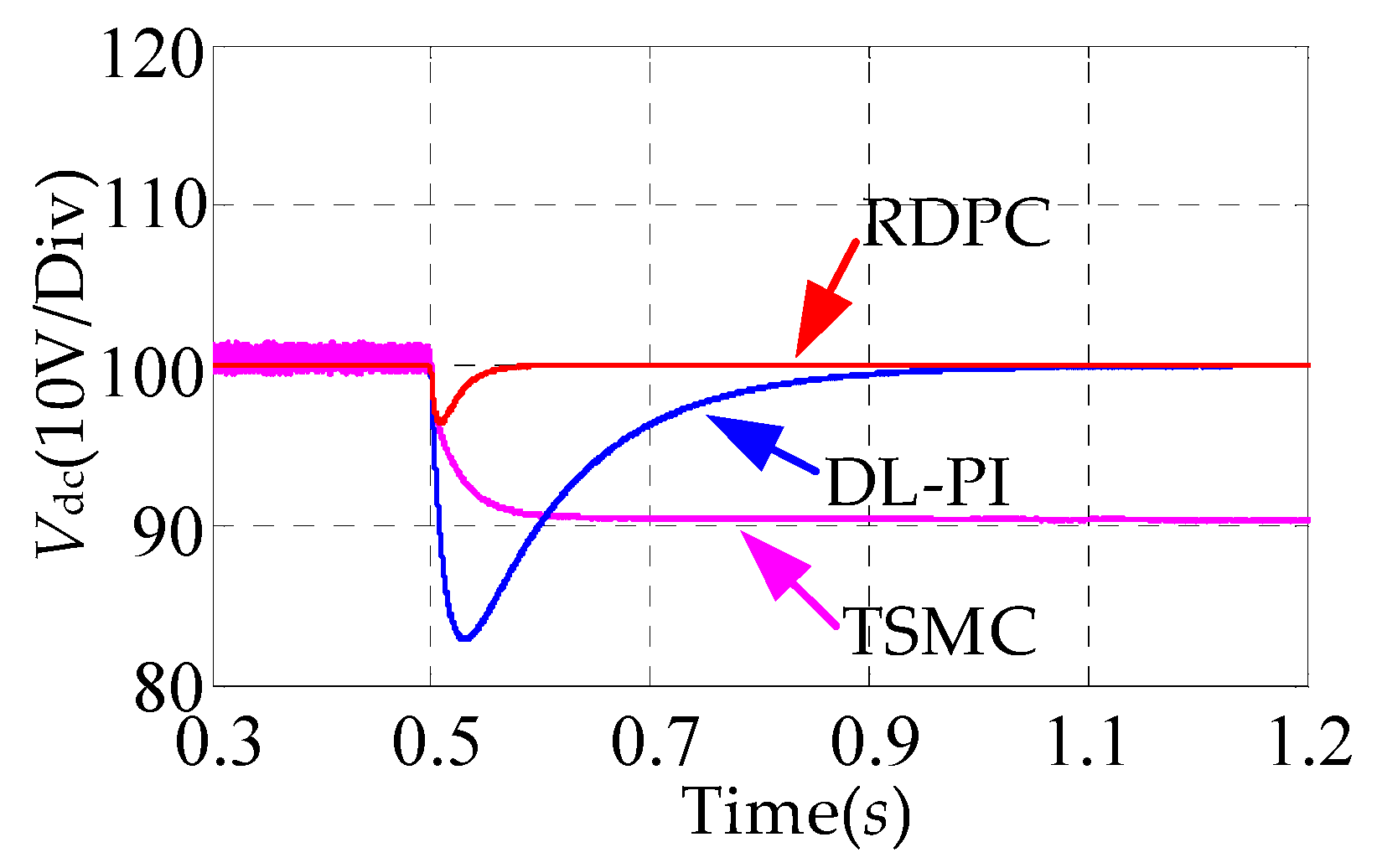
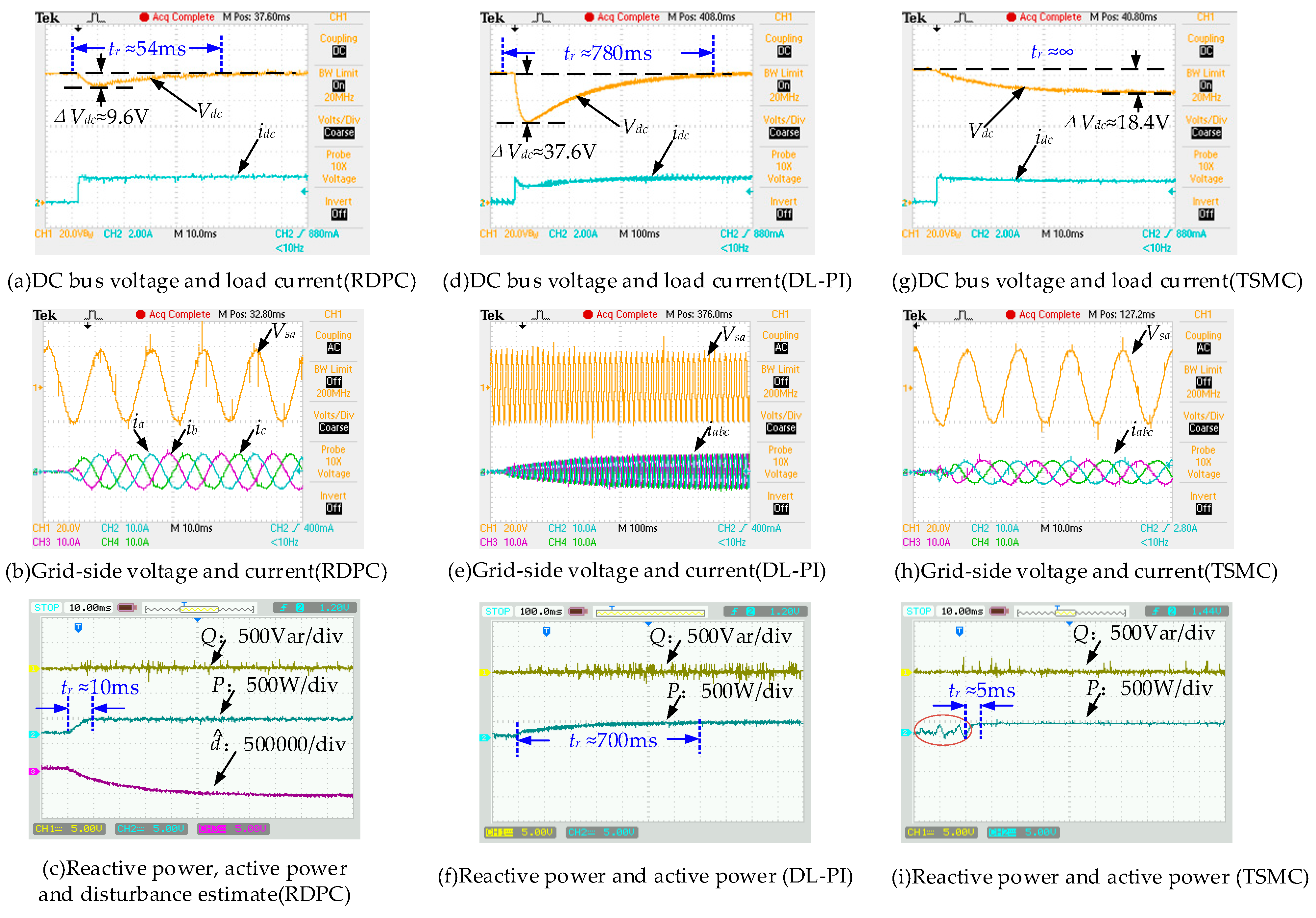
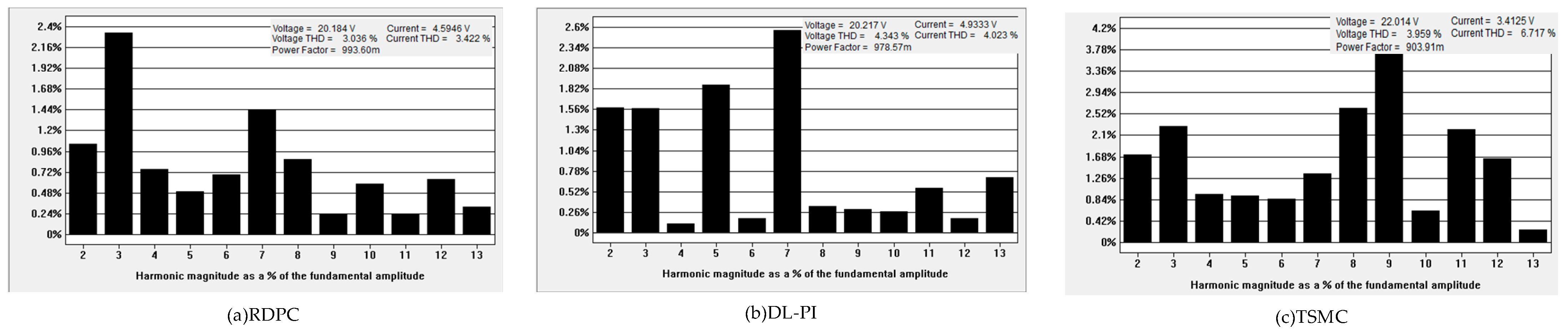
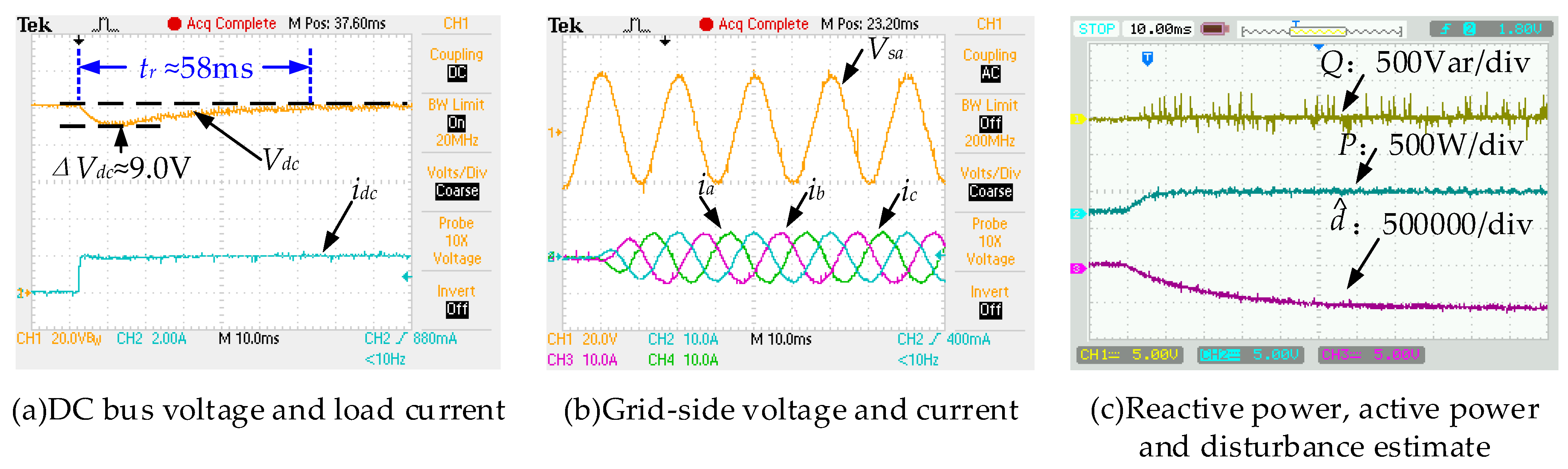
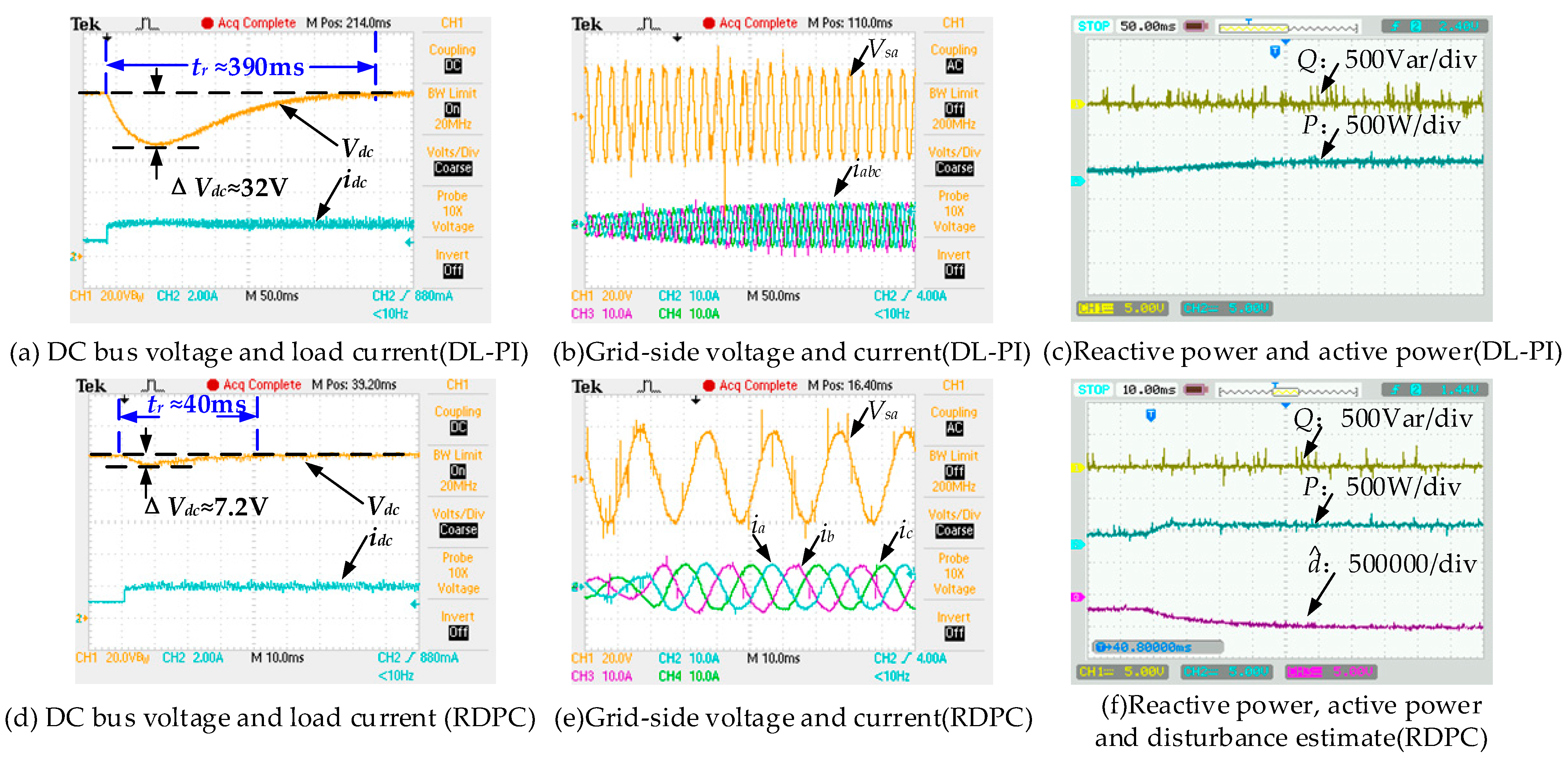
5.1. Dynamic and Steady-State Performance at Nominal Parameters
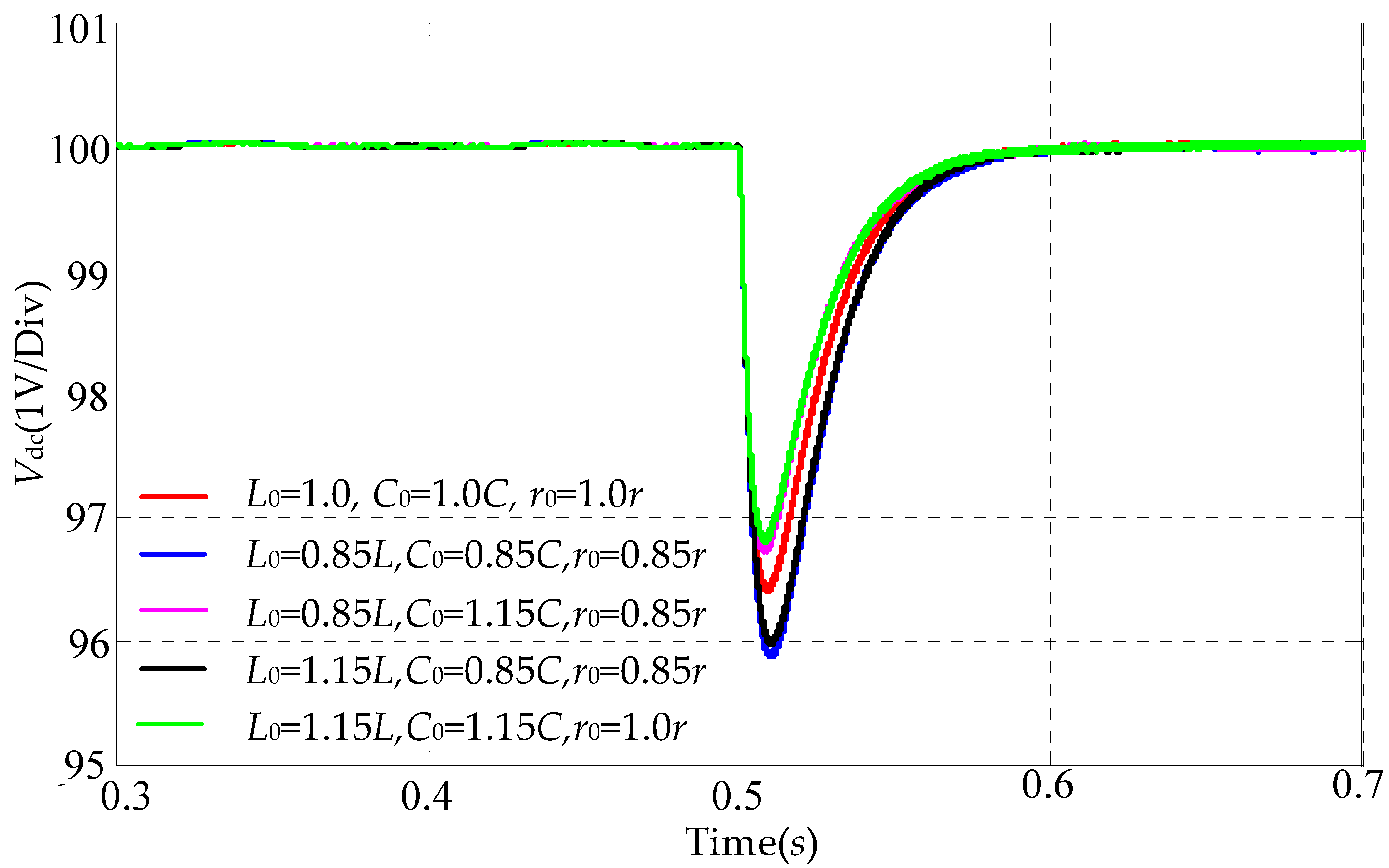
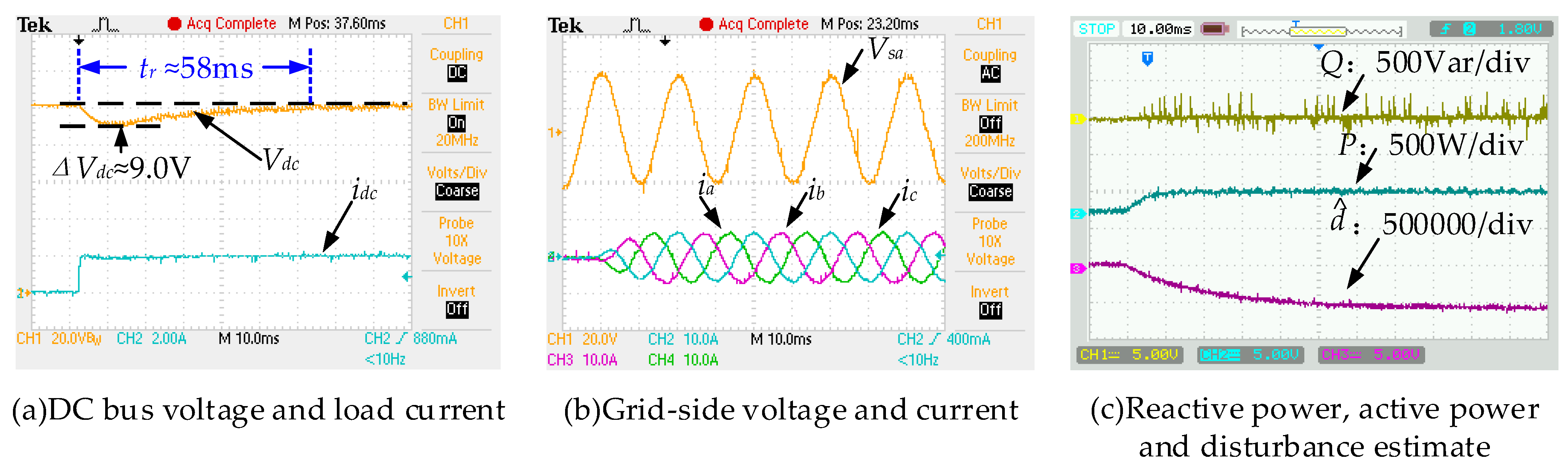
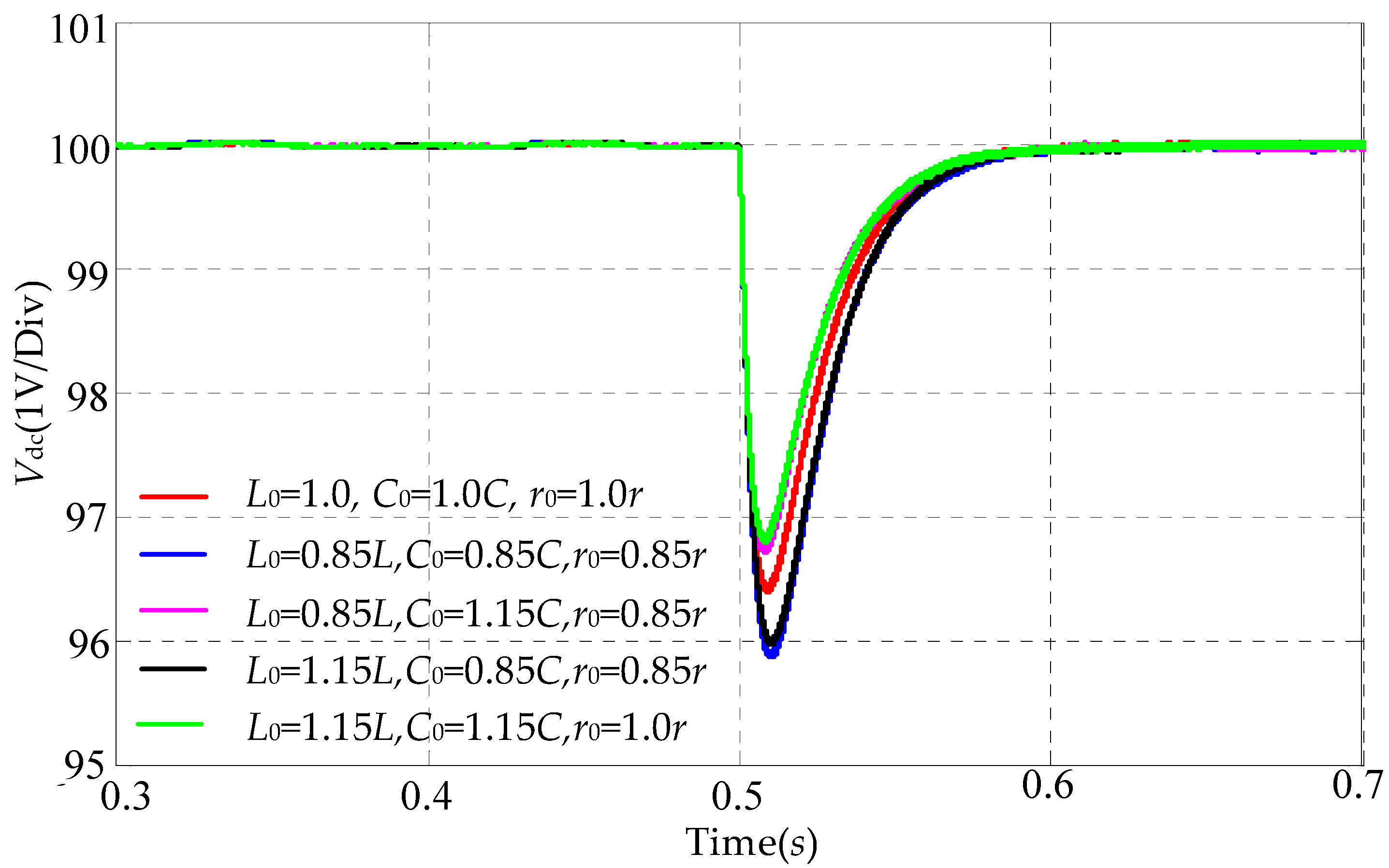
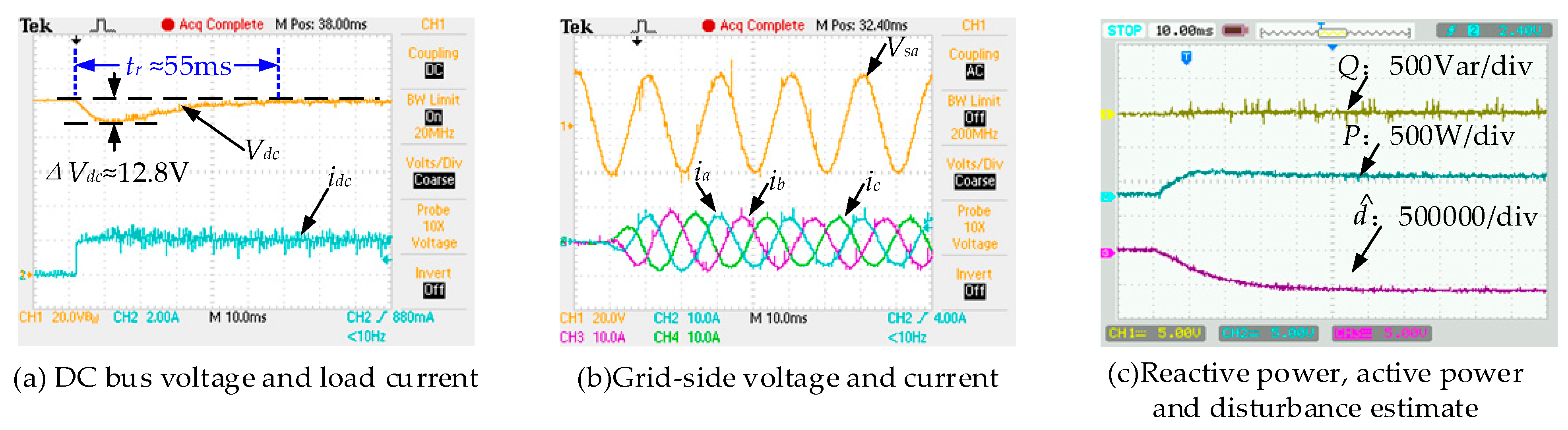
5.2. Parameter Robustness
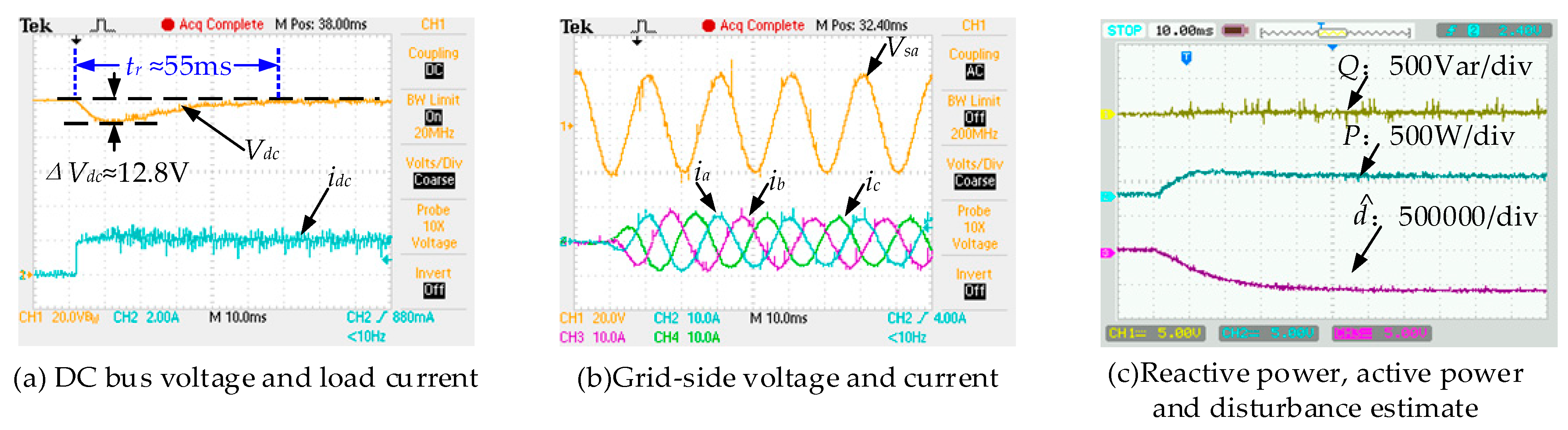
5.3. Constant Power Load
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiao, Q.; Hosseini, R.; Cuzner, R.M. A comparison between silicon carbide based current source rectifier and voltage source rectifier for applications in community DC microgrid. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 544–549. [Google Scholar]
- Wu, B.; Gao, Z.; Zhou, X.; Ma, Y.; Wang, C. Research and Simulation of DC Microgrid Three-Phase AC-DC Converter Control Strategy Based on Double Loop. IEEE Access 2020, 8, 186448–186461. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Trzynadlowski, A.M. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans. Power Electron. 2003, 18, 1390–1396. [Google Scholar] [CrossRef]
- Xie, Z.; Wu, W.; Chen, Y.; Gong, W. Admittance-Based Stability Comparative Analysis of Grid-Connected Inverters with Direct Power Control and Closed-Loop Current Control. IEEE Trans. Ind. Electron. 2021, 68, 8333–8344. [Google Scholar] [CrossRef]
- Yan, S.; Yang, Y.; Hui, S.Y.; Blaabjerg, F. A Review on Direct Power Control of Pulse-width Modulation Converters. IEEE Trans. Power Electron. 2021, 36, 11984–12007. [Google Scholar] [CrossRef]
- Gil-Gonzalez, W.; Escobar-Mejia, A.; Montoya-Giraldo, O.D. Model Predictive Direct Power Control Applied to Grid-Connected Voltage Source Inverters. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 610–614. [Google Scholar]
- Razali, A.M.; Rahman, M.A.; George, G.; Rahim, N.A. Analysis and Design of New Switching Lookup Table for Virtual Flux Direct Power Control of Grid-Connected Three-Phase PWM AC–DC Converter. IEEE Trans. Ind. Appl. 2015, 51, 1189–1200. [Google Scholar] [CrossRef]
- Lee, S.S.; Heng, Y.E. Table-based DPC for grid connected VSC under unbalanced and distorted grid voltages: Review and optimal method. Renew. Sustain. Energy Rev. 2017, 76, 51–61. [Google Scholar] [CrossRef]
- Malinowski, M.; Jasinski, M.; Kazmierkowski, M.P. Simple Direct Power Control of Three-Phase PWM Rectifier Using Space-Vector Modulation (DPC-SVM). IEEE Trans. Ind. Electron. 2004, 51, 447–454. [Google Scholar] [CrossRef]
- Gui, Y.; Li, M.; Lu, J.; Golestan, S.; Guerrero, J.M.; Vasquez, J.C. A Voltage Modulated DPC Approach for Three-Phase PWM Rectifier. IEEE Trans. Ind. Electron. 2018, 65, 7612–7619. [Google Scholar] [CrossRef]
- Moreno, J.C.; Espi Huerta, J.M.; Gil, R.G.; Gonzalez, S.A. A Robust Predictive Current Control for Three-Phase Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2009, 56, 1993–2004. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Liang, J.; Liu, J.; Zhang, N.; Walker, P.D. Robust Deadbeat Predictive Power Control with a Discrete-Time Disturbance Observer for PWM Rectifiers Under Unbalanced Grid Conditions. IEEE Trans. Power Electron. 2019, 34, 287–300. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2006. [Google Scholar]
- Eltoum, M.A.M.; Al-Mahzamah, F.; Ferik, S.E. Feedback Linearization Sliding Mode Control of Three-Phase Grid-tied AC/DC PWM Converter. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 20–23 July 2020; pp. 1116–1121. [Google Scholar]
- Wai, R.; Yang, Y. Design of Backstepping Direct Power Control for Three-Phase PWM Rectifier. IEEE Trans. Ind. Appl. 2019, 55, 3160–3173. [Google Scholar] [CrossRef]
- Roy, T.K.; Mahmud, M.A.; Islam, S.N.; Rajasekar, N.; Muttaqi, K.M.; Oo, A.M.T. Robust Adaptive Direct Power Control of Grid-Connected Photovoltaic Systems. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Wang, Y.; Li, Y.; Huang, S. An Improved Sliding Mode Direct Power Control Strategy Based on Reactive Power Compensation for Vienna Rectifier. IEEE Access 2022, 10, 15469–15477. [Google Scholar] [CrossRef]
- He, T.; Lu, D.D.; Li, L.; Zhang, J.; Zheng, L.; Zhu, J. Model-Predictive Sliding-Mode Control for Three-Phase AC/DC Converters. IEEE Trans. Power Electron. 2018, 33, 8982–8993. [Google Scholar] [CrossRef]
- Gui, Y.; Blaabjerg, F.; Wang, X.; Bendtsen, J.D.; Yang, D.; Stoustrup, J. Improved DC-Link Voltage Regulation Strategy for Grid-Connected Converters. IEEE Trans. Ind. Electron. 2021, 68, 4977–4987. [Google Scholar] [CrossRef]
- Liu, J.; Yin, Y.; Luo, W.; Vazquez, S.; Franquelo, L.G.; Wu, L. Sliding Mode Control of a Three-Phase AC/DC Voltage Source Converter Under Unknown Load Conditions: Industry Applications. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1771–1780. [Google Scholar] [CrossRef]
- Ma, H.; Xie, Y.; Shi, Z. Improved direct power control for Vienna-type rectifiers based on sliding mode control. IET Power Electron. 2016, 9, 427–434. [Google Scholar] [CrossRef]
- Guo, T.; Sun, Z.; Wang, X.; Li, S.; Zhang, K. A Simple Current-Constrained Controller for Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Inform. 2019, 15, 1486–1495. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Liu, Y. Speed-Current Single-Loop Control with Overcurrent Protection for PMSM Based on Time-Varying Nonlinear Disturbance Observer. IEEE Trans. Ind. Electron. 2021, 69, 179–189. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X.; Yu, J. Time-Varying Disturbance Observer Based Improved Sliding Mode Single-Loop Control of PMSM Drives with a Hybrid Reaching Law. IEEE Trans. Energy Convers. 2023, 38, 2539–2549. [Google Scholar] [CrossRef]
- Ma, W.; Zhang, B.; Qiu, D. Robust Single-Loop Control Strategy for Four-Level Flying-Capacitor Converter Based on Switched System Theory. IEEE Trans. Ind. Electron. 2023, 70, 7832–7844. [Google Scholar] [CrossRef]
- Zhao, F.; Liu, Y.; Yao, X.; Su, B. Integral sliding mode control of time-delay systems with mismatching uncertainties. J. Syst. Eng. Electron. 2010, 21, 273–280. [Google Scholar] [CrossRef]
- Chen, W.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Cao, M.; Li, S.; Yang, J.; Zhang, K. Mismatched Disturbance Compensation Enhanced Robust H∞ Control for the DC-DC Boost Converter Feeding Constant Power Loads. IEEE Trans. Energy Convers. 2023, 38, 1300–1310. [Google Scholar] [CrossRef]
- Bodur, F.; Kaplan, O. Fixed-Time Sliding Mode Control for DC-DC Converters with both Matched and Mismatched Disturbances Based on Disturbance Observer. In Proceedings of the 2023 12th International Conference on Renewable Energy Research and Applications (ICRERA), Oshawa, ON, Canada, 29 August–1 September 2023; pp. 569–575. [Google Scholar]
- Boo, J.; Chwa, D. Integral Sliding Mode Control-Based Robust Bidirectional Platoon Control of Vehicles with the Unknown Acceleration and Mismatched Disturbance. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10881–10894. [Google Scholar] [CrossRef]
- Wu, T.; Sun, K.; Kuo, C.; Chang, C. Predictive Current Controlled 5-kW Single-Phase Bidirectional Inverter with Wide Inductance Variation for DC-Microgrid Applications. IEEE Trans. Power Electron. 2010, 25, 3076–3084. [Google Scholar] [CrossRef]
- Wu, T.; Chang, C.; Lin, L.; Chang, Y.; Chang, Y. Two-Phase Modulated Digital Control for Three-Phase Bidirectional Inverter with Wide Inductance Variation. IEEE Trans. Power Electron. 2013, 28, 1598–1607. [Google Scholar] [CrossRef]
- Zhang, X.; He, J.; Hao, M. Stability Enhancement Methods of Inverters Based on Lyapunov Function, Predictive Control, and Reinforcement Learning; Springer Nature Singapore Pte Ltd.: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Ghanes, M.; Trabelsi, M.; Abu-Rub, H.; Ben-Brahim, L. Robust Adaptive Observer-Based Model Predictive Control for Multilevel Flying Capacitors Inverter. IEEE Trans. Ind. Electron. 2016, 63, 7876–7886. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meaning | Parameters | Value | Units |
|---|---|---|---|
| Grid voltage (peak voltage) | Vm | 30 | V |
| Grid frequency | f | 50 | Hz |
| Filter inductance | L | 5.62 | mH |
| Equivalent resistance | r | 1.2 | Ω |
| DC bus reference voltage | Vdcref | 100 | V |
| DC filtering capacitor | C | 1000 | μF |
| Sampling frequency | fs | 9k | Hz |
| Controllers | Parameters | Value |
|---|---|---|
| RDPC | l | [50,0] |
| cVdc | 30 | |
| kVdc | 1250.3 | |
| ρ1 | 100 | |
| kQ | 20 | |
| ρ2 | 100 | |
| DL-PI | Kp_P | 420 |
| Ki_P | 2000 | |
| Kp_Q | 420 | |
| Ki_Q | 2000 | |
| Kp_Vdc | 30 | |
| Ki_Vdc | 300 | |
| TSMC | c1 | 30 |
| kp | 400,000 | |
| kq | 100,000 |
| L0 | C0 | r0 | Grid-Side Current THD | ΔVdc (V) | tr (ms) |
|---|---|---|---|---|---|
| 85% | 85% | 85% | 3.612% | 11.2 | 56 |
| 85% | 115% | 85% | 3.416% | 9.0 | 58 |
| 115% | 85% | 85% | 3.692% | 10.4 | 56 |
| 115% | 115% | 100% | 3.658% | 9.0 | 56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, B.; Qi, J.; Li, H. Robust Direct Power Control of Three-Phase PWM Rectifier with Mismatched Disturbances. Electronics 2024, 13, 1476. https://doi.org/10.3390/electronics13081476
Hou B, Qi J, Li H. Robust Direct Power Control of Three-Phase PWM Rectifier with Mismatched Disturbances. Electronics. 2024; 13(8):1476. https://doi.org/10.3390/electronics13081476
Chicago/Turabian StyleHou, Bo, Jiayan Qi, and Huan Li. 2024. "Robust Direct Power Control of Three-Phase PWM Rectifier with Mismatched Disturbances" Electronics 13, no. 8: 1476. https://doi.org/10.3390/electronics13081476