
Evaluation of Entropy Analysis as a Fault-Related Feature for Detecting Faults in Induction Motors and Their Kinematic Chain

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Theoretical Background
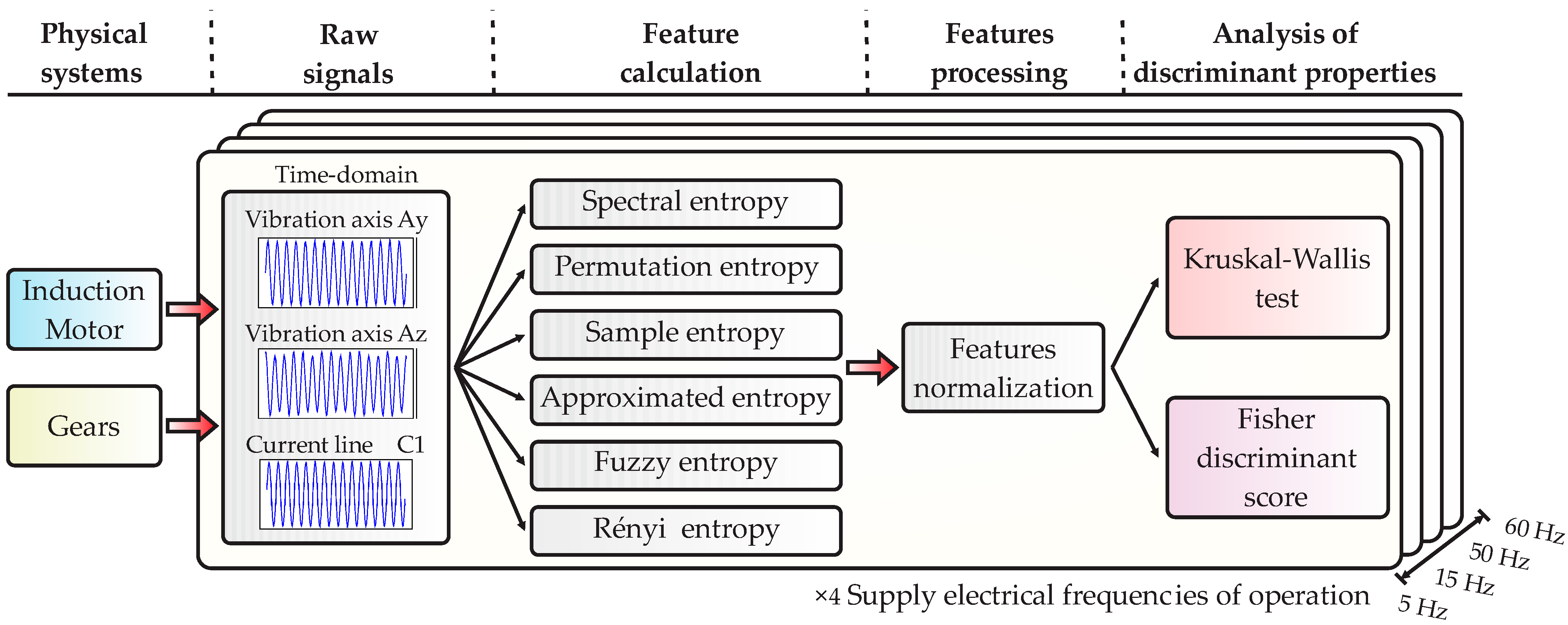
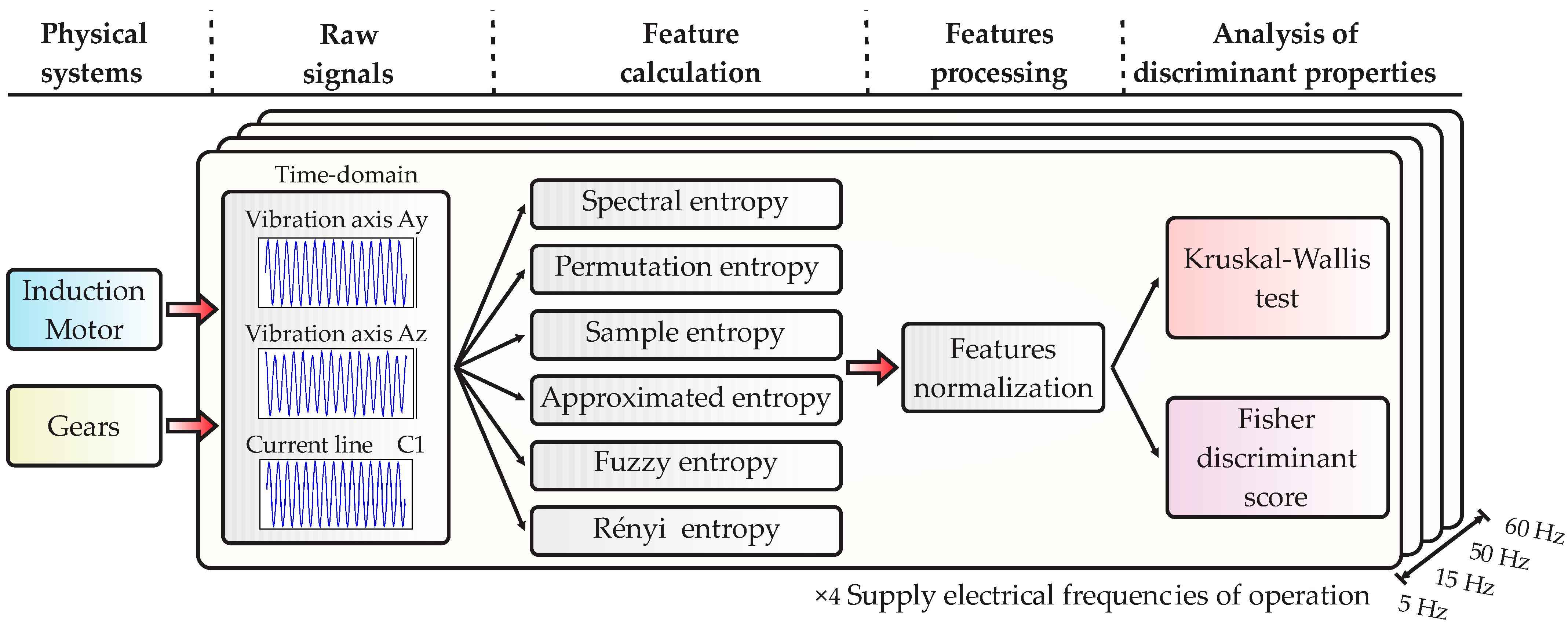
3. Methodology
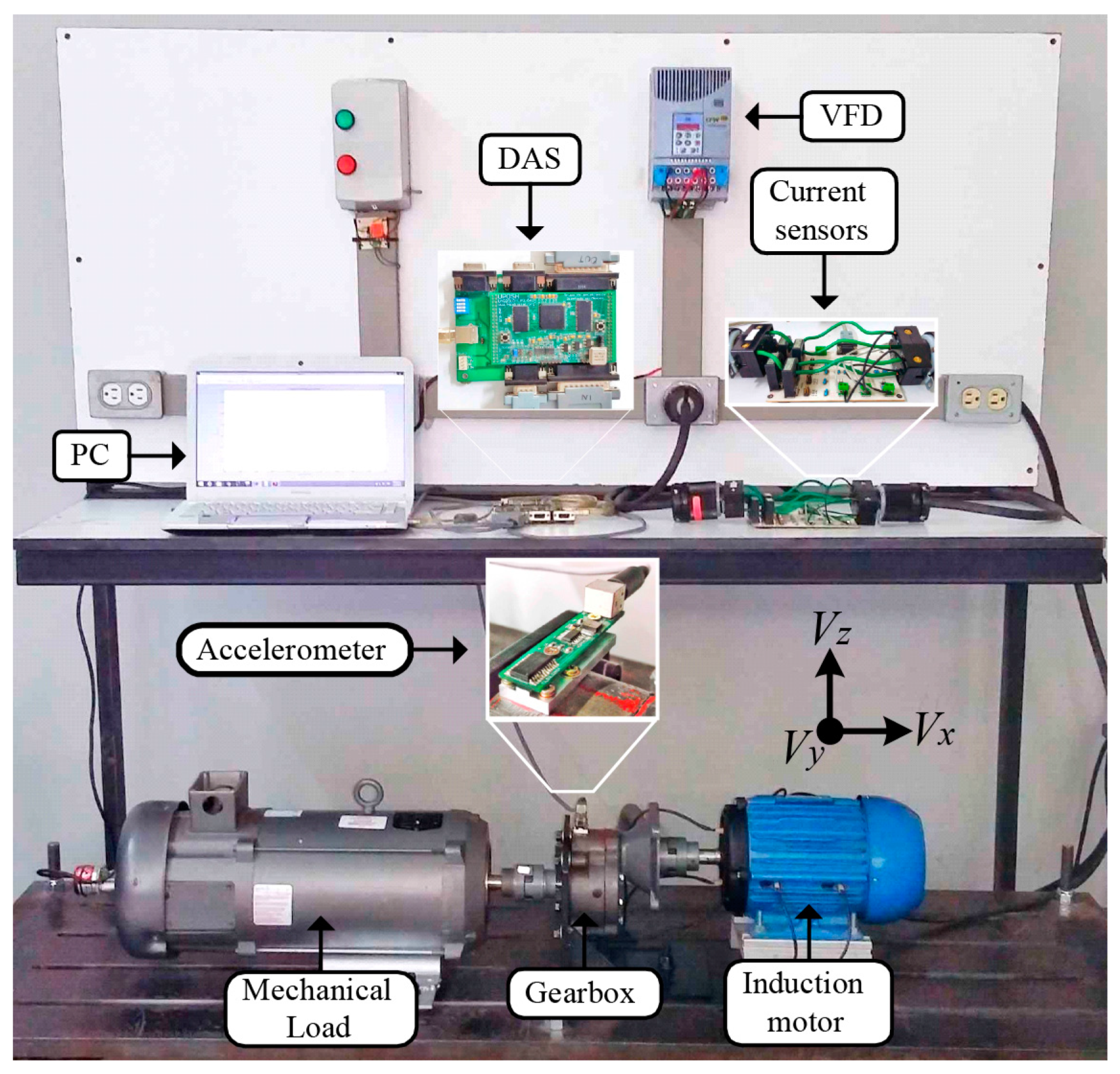
3.1. Physical Systems
3.2. Raw Signals
3.3. Feature Calculation
3.4. Feature Processing
3.5. Analysis of Discriminant Properties
- Step I: all samples () for all classes are sorted and then a rank is assigned in ascending order by ignoring the class to which the samples belong;
- Step II: find the sum of all ranks for each individual class with samples;
- Step III: compute the KW statistic () by applying Equation (12);
- Step IV: the significance of the resulting values for all classes are assessed through the Chi-square test (); thus, the values are statistically significant if is equal or larger than .
4. Experimental Setup
5. Results and Discussions
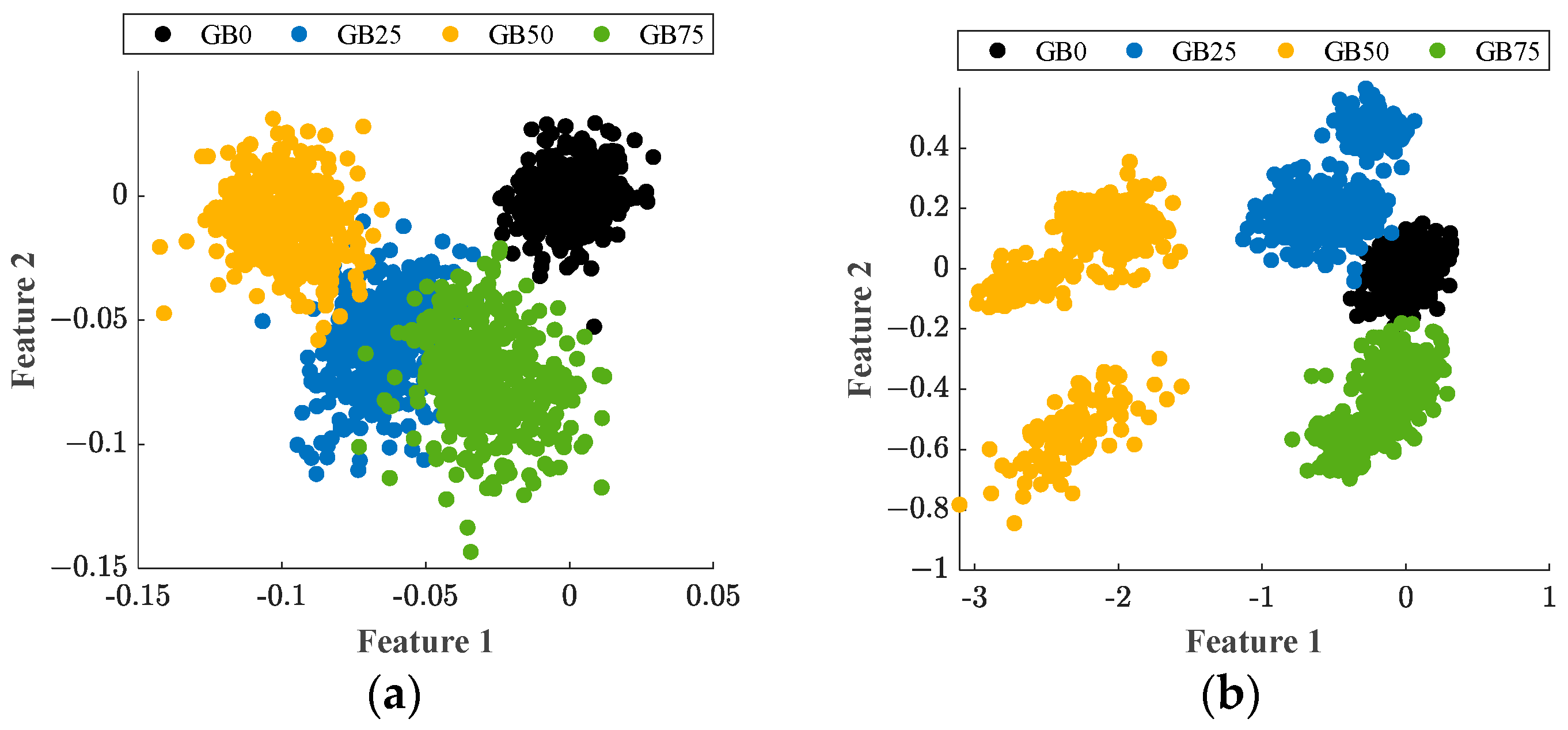
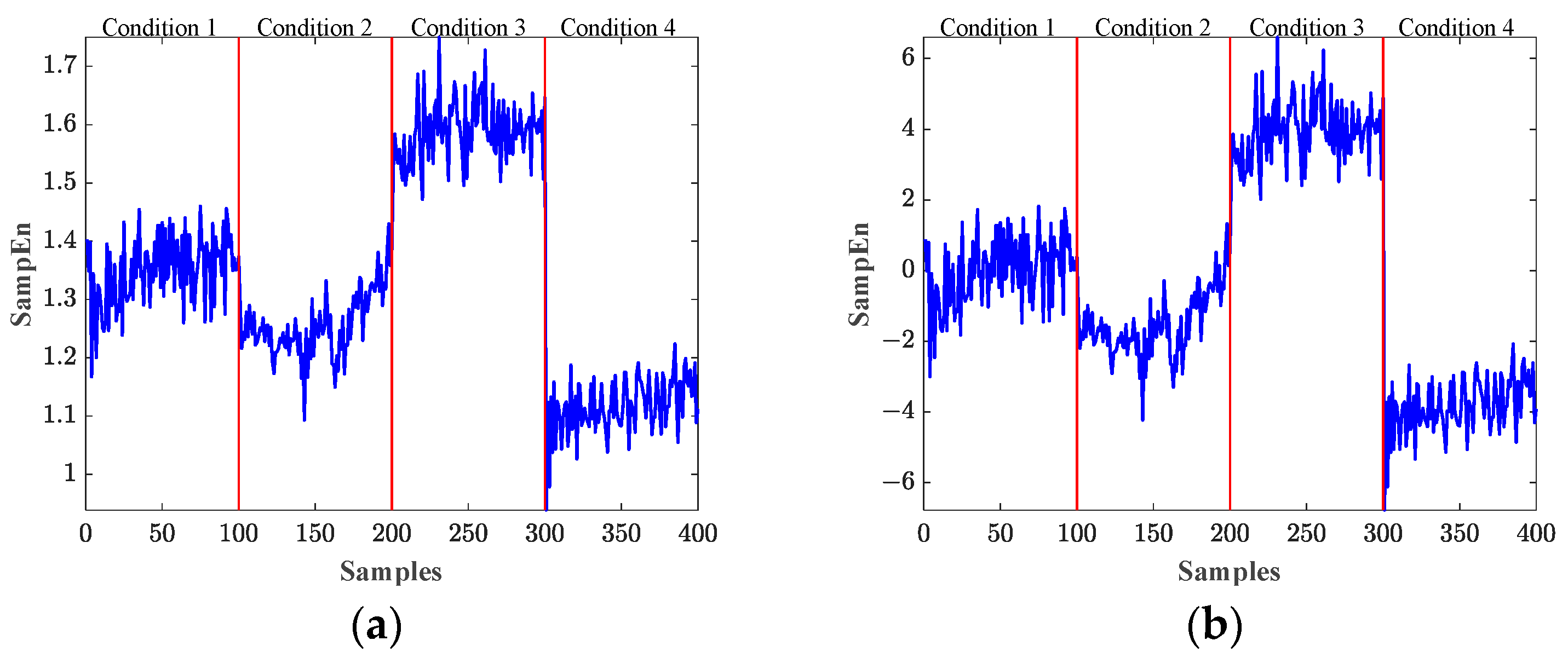
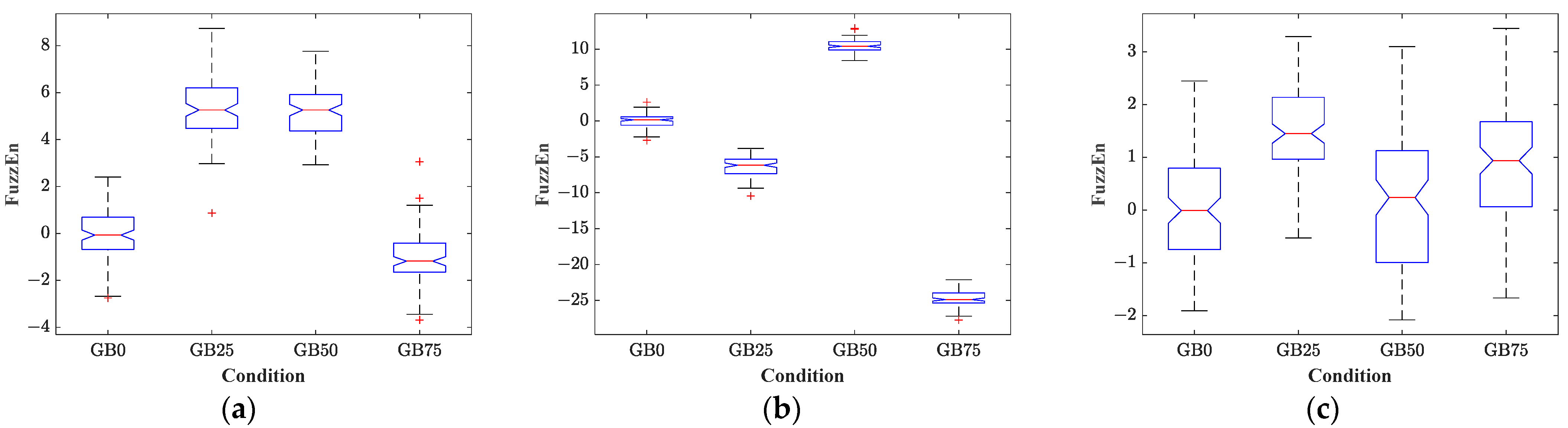
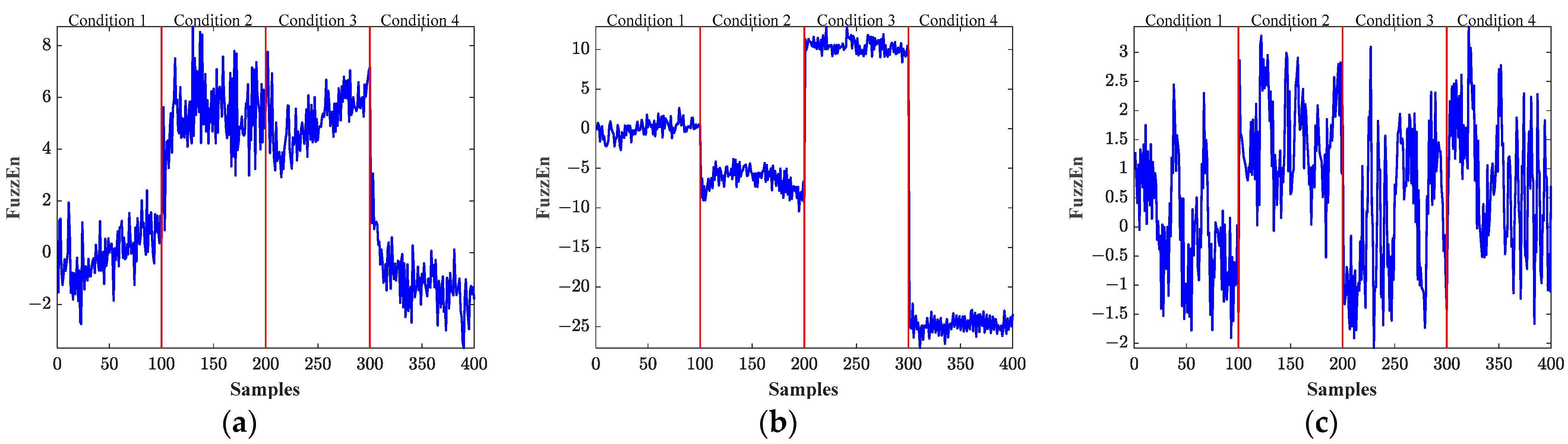
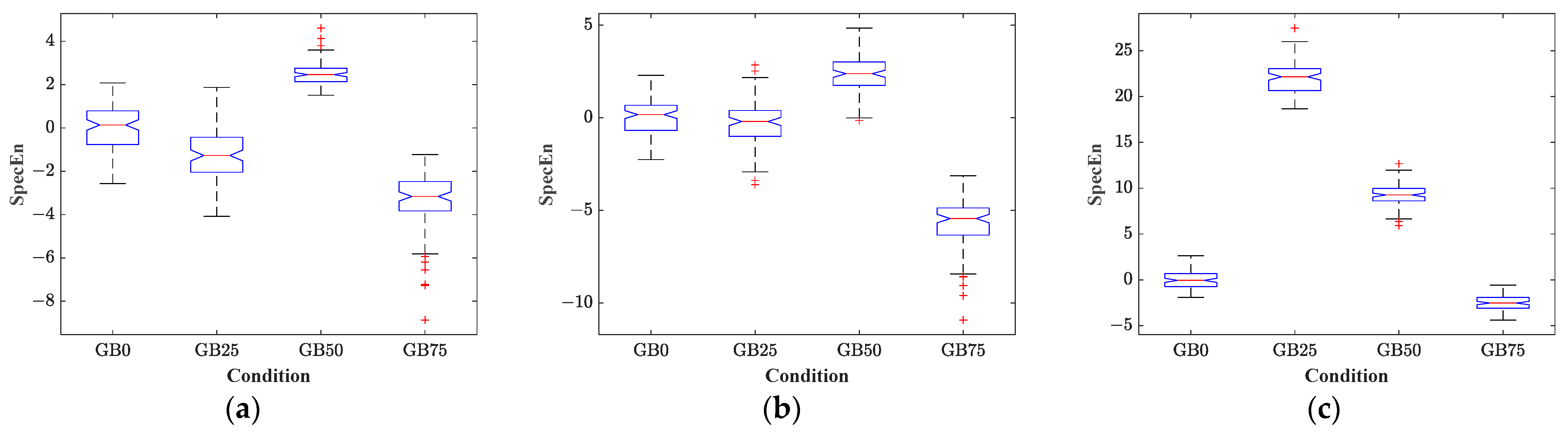
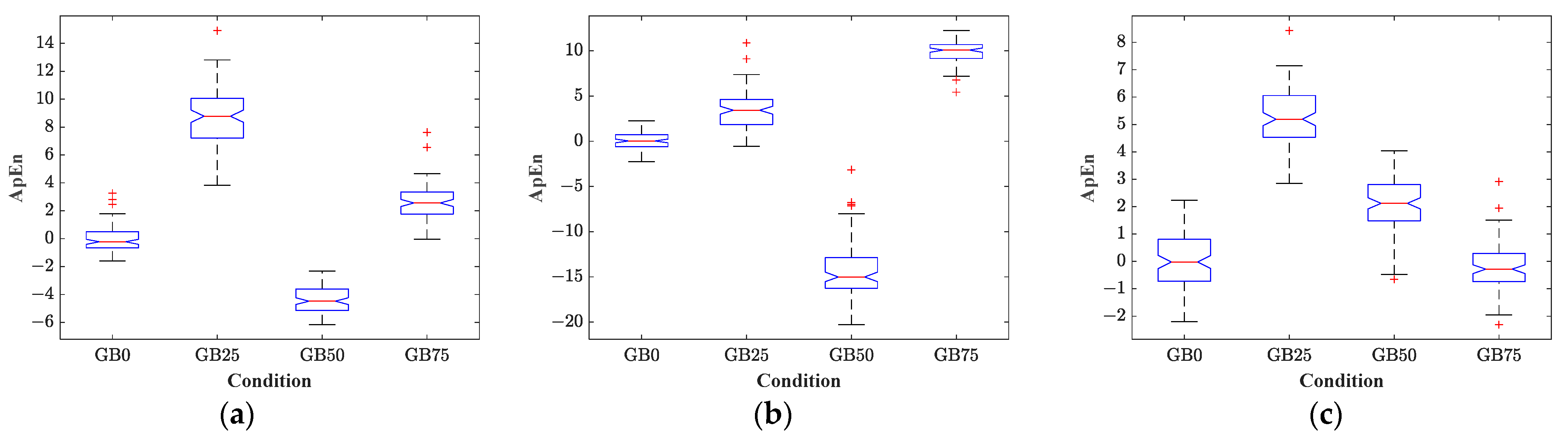
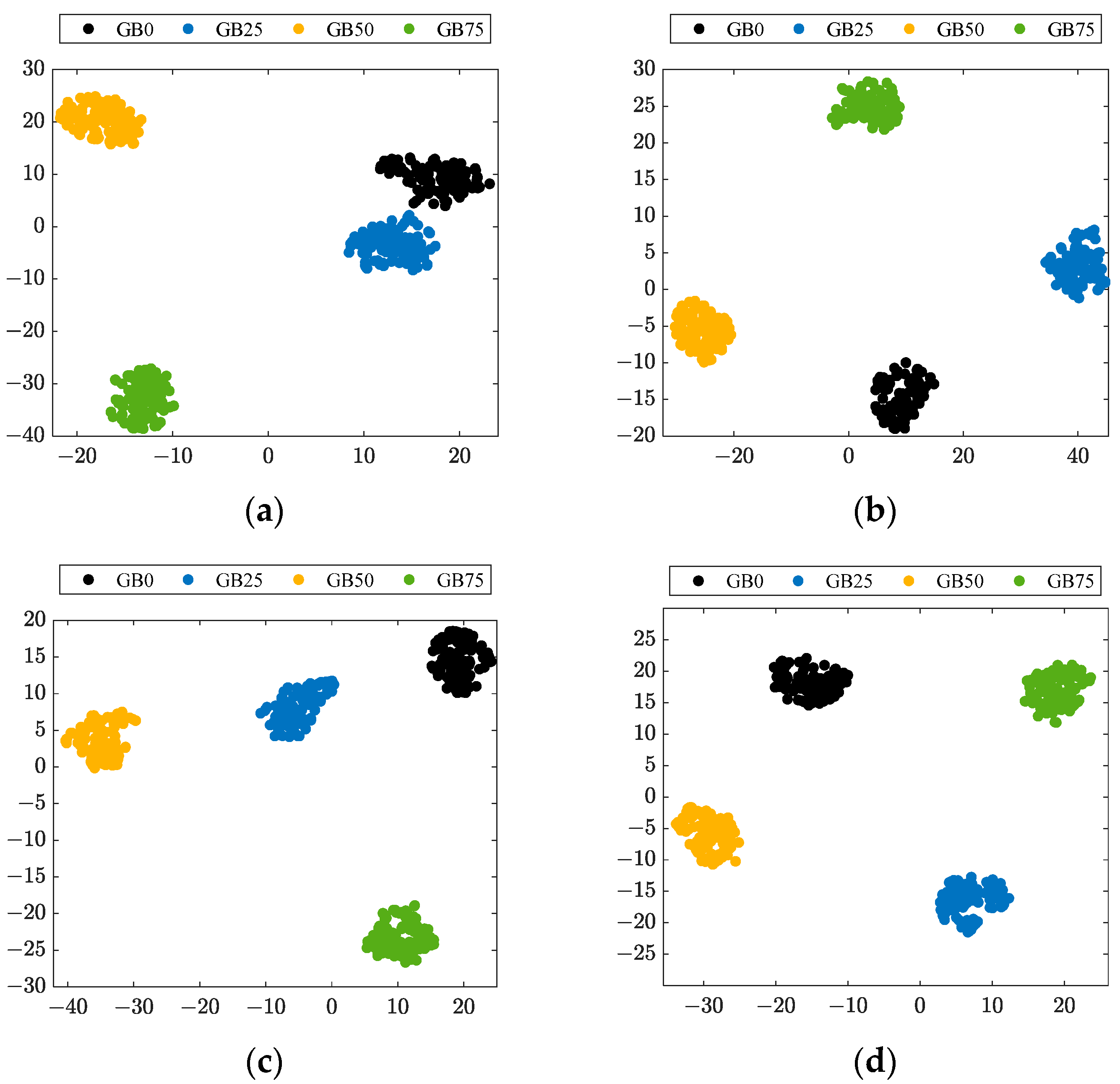
5.1. Entropy Analysis for Detecting Faults in the GB
- (i)
- An entropy feature from the normalized feature matrices , , and is selected, such as, for example, the FuzzEn.
- (ii)
- When analyzing the studied conditions in the GB, firstly, the samples of the FuzzEn feature from the GB0 condition are compared to the samples of the FuzzEn feature from the GB25 condition by using (13)–(15). As a result, a discriminant ratio () is computed, which measures the linear separation between the GB0 and GB25 conditions.
- (iii)
- The previous step is repeated for the same entropy feature (i.e., FuzzEn) until all faulty conditions (GB25, GB50, and GB75) are iteratively faced with the healthy condition (GB0).
- (iv)
- Another entropy feature is selected and steps (II) and (III) are performed; over the new entropy feature, the procedure is applied to all available entropy features.
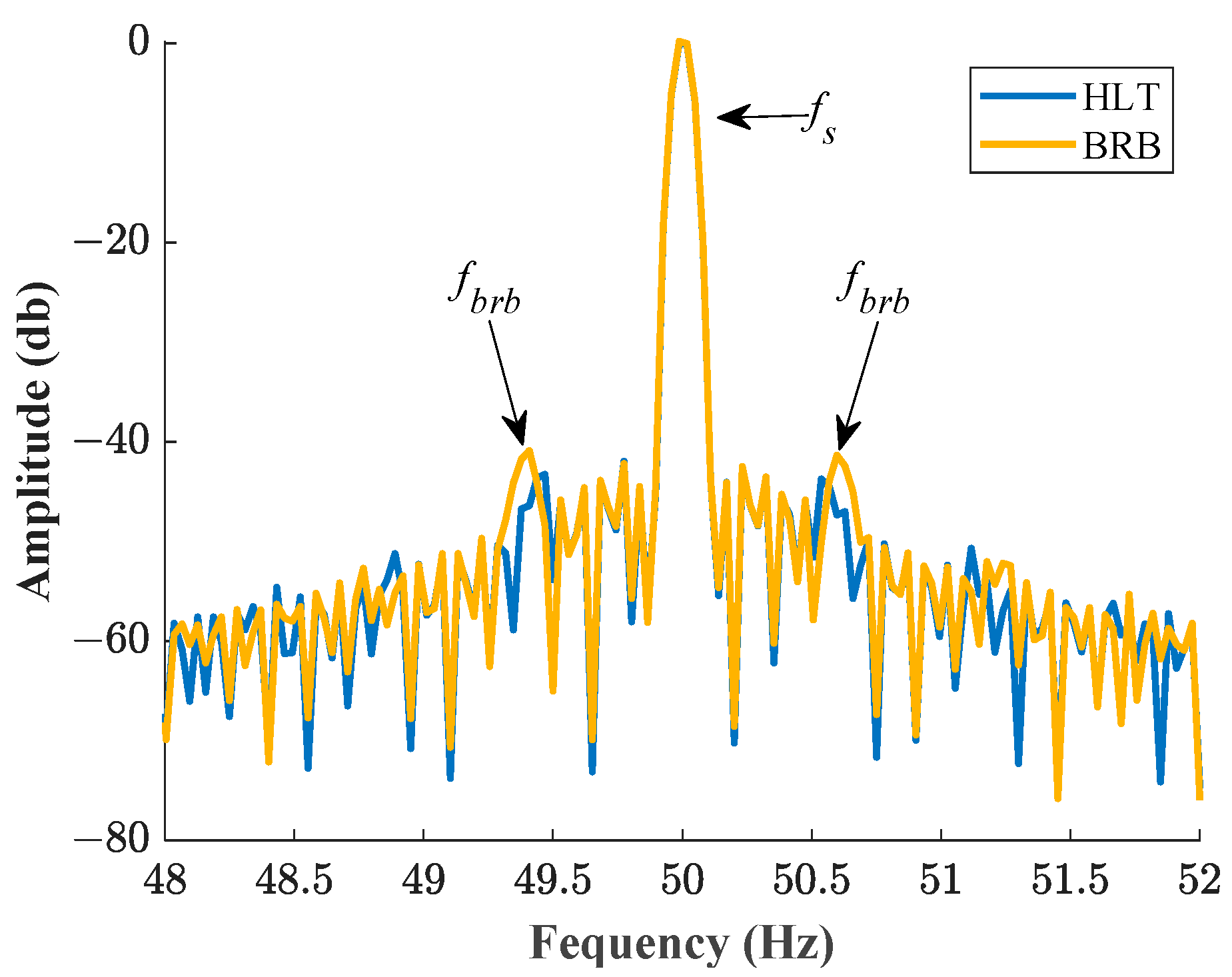
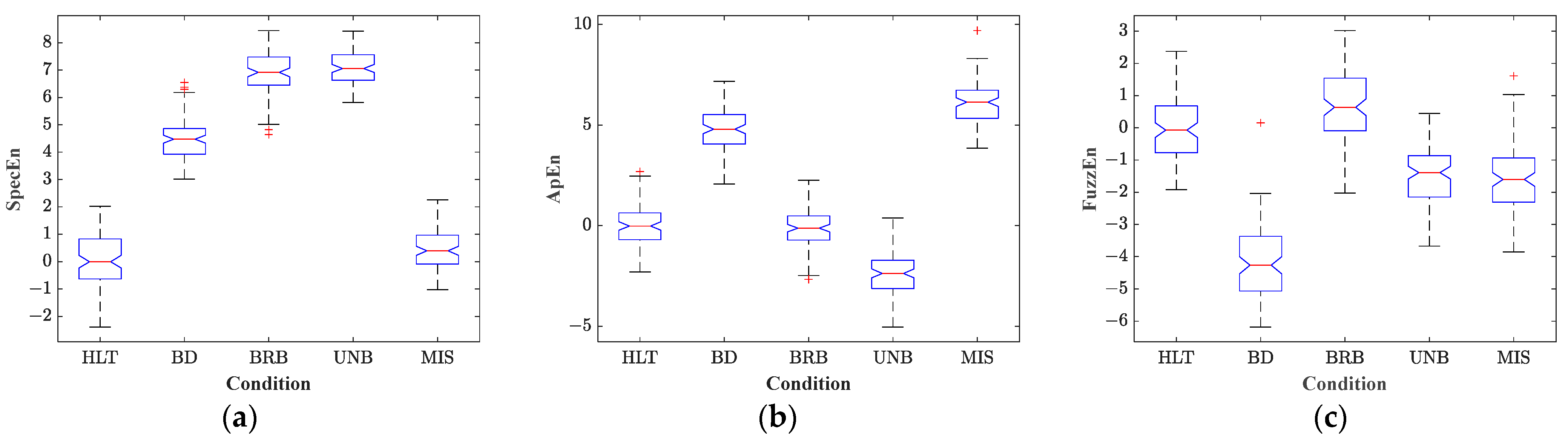
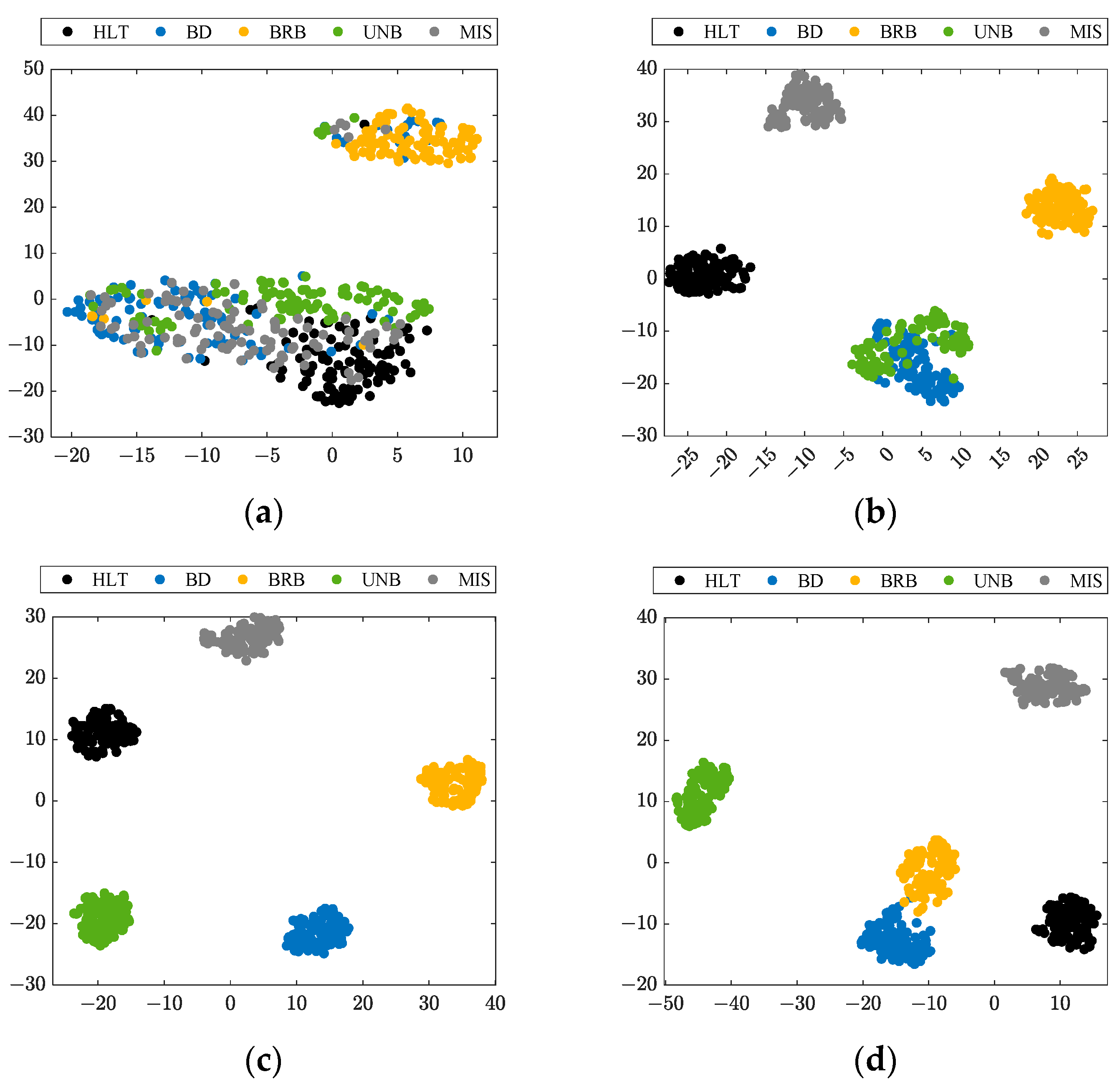
5.2. Entropy Analysis for Detecting Faults in the IM
5.3. Comparison versus Classical Approaches
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sardar, M.U.; Vaimann, T.; Kütt, L.; Kallaste, A.; Asad, B.; Akbar, S.; Kudelina, K. Inverter-Fed Motor Drive System: A Systematic Analysis of Condition Monitoring and Practical Diagnostic Techniques. Energies 2023, 16, 5628. [Google Scholar] [CrossRef]
- Drakaki, M.; Karnavas, Y.L.; Tzionas, P.; Chasiotis, I.D. Recent Developments Towards Industry 4.0 Oriented Predictive Maintenance in Induction Motors. Procedia Comput. Sci. 2021, 180, 943–949. [Google Scholar] [CrossRef]
- Torrent, M.; Blanqué, B.; Monjo, L. Replacing Induction Motors without Defined Efficiency Class by IE Class: Example of Energy, Economic, and Environmental Evaluation in 1.5 kW—IE3 Motors. Machines 2023, 11, 567. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, P.; Gao, R.X.; Sun, C.; Yan, R. Induction Motor Condition Monitoring for Sustainable Manufacturing. Procedia Manuf. 2019, 33, 802–809. [Google Scholar] [CrossRef]
- Gangsar, P.; Tiwari, R. Signal Based Condition Monitoring Techniques for Fault Detection and Diagnosis of Induction Motors: A State-of-the-Art Review. Mech. Syst. Signal Process. 2020, 144, 106908. [Google Scholar] [CrossRef]
- Workineh, T.G.; Jember, Y.B.; Kassie, A.T. Evaluation of Intelligent PPI Controller for the Performance Enhancement of Speed Control of Induction Motor. Sci. Afr. 2023, 22, e01982. [Google Scholar] [CrossRef]
- Chen, C.; Yuan, Y.; Sun, W.; Zhao, F. Multivariate Multi-Step Time Series Prediction of Induction Motor Situation Based on Fused Temporal-Spatial Features. Int. J. Hydrog. Energy 2024, 50, 1386–1394. [Google Scholar] [CrossRef]
- Singh, G.; Anil Kumar, T.C.; Naikan, V.N.A. Efficiency Monitoring as a Strategy for Cost Effective Maintenance of Induction Motors for Minimizing Carbon Emission and Energy Consumption. Reliab. Eng. Syst. Saf. 2019, 184, 193–201. [Google Scholar] [CrossRef]
- Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Ramirez-Cortes, J.; Cruz-Vega, I. Hilbert Spectrum Analysis of Induction Motors for the Detection of Incipient Broken Rotor Bars. Measurement 2017, 109, 247–255. [Google Scholar] [CrossRef]
- Kumar, S.; Mukherjee, D.; Guchhait, P.K.; Banerjee, R.; Srivastava, A.K.; Vishwakarma, D.N.; Saket, R.K. A Comprehensive Review of Condition Based Prognostic Maintenance (CBPM) for Induction Motor. IEEE Access 2019, 7, 90690–90704. [Google Scholar] [CrossRef]
- Mallik, S.; Mallik, K.; Barman, A.; Maiti, D.; Biswas, S.K.; Deb, N.K.; Basu, S. Efficiency and Cost Optimized Design of an Induction Motor Using Genetic Algorithm. IEEE Trans. Ind. Electron. 2017, 64, 9854–9863. [Google Scholar] [CrossRef]
- IEA. World Energy Outlook 2023—Analysis, International Energy Agency. Available online: https://www.iea.org/reports/world-energy-outlook-2023 (accessed on 28 February 2024).
- Bessous, N.; Sbaa, S.; Toumi, A. Experimental Investigation on Broken Rotor Bar Faults in Three Phase Induction Motors Using MVSA-FFT Method. In Proceedings of the 2018 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–7. [Google Scholar]
- Kompella, K.C.D.; Mannam, V.G.R.; Rayapudi, S.R. DWT Based Bearing Fault Detection in Induction Motor Using Noise Cancellation. J. Electr. Syst. Inf. Technol. 2016, 3, 411–427. [Google Scholar] [CrossRef]
- Jain, S.K.; Singh, S.N. Harmonics Estimation in Emerging Power System: Key Issues and Challenges. Electr. Power Syst. Res. 2011, 81, 1754–1766. [Google Scholar] [CrossRef]
- Chen, Z.; Liang, D.; Jia, S.; Yang, L.; Yang, S. Incipient Interturn Short-Circuit Fault Diagnosis of Permanent Magnet Synchronous Motors Based on the Data-Driven Digital Twin Model. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 3514–3524. [Google Scholar] [CrossRef]
- Bittencourt, A.C.; Saarinen, K.; Sander-Tavallaey, S.; Gunnarsson, S.; Norrlöf, M. A Data-Driven Approach to Diagnostics of Repetitive Processes in the Distribution Domain—Applications to Gearbox Diagnostics in Industrial Robots and Rotating Machines. Mechatronics 2014, 24, 1032–1041. [Google Scholar] [CrossRef]
- Rosa, T.E.; de Paula Carvalho, L.; Gleizer, G.A.; Jayawardhana, B. Fault Detection for LTI Systems Using Data-Driven Dissipativity Analysis. Mechatronics 2024, 97, 103111. [Google Scholar] [CrossRef]
- Jaen-Cuellar, A.Y.; Elvira-Ortiz, D.A.; Saucedo-Dorantes, J.J. Statistical Machine Learning Strategy and Data Fusion for Detecting Incipient ITSC Faults in IM. Machines 2023, 11, 720. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, J.; Xiang, J. Online Bearing Fault Diagnosis Using Numerical Simulation Models and Machine Learning Classifications. Reliab. Eng. Syst. Saf. 2023, 234, 109142. [Google Scholar] [CrossRef]
- Das, O.; Bagci Das, D.; Birant, D. Machine Learning for Fault Analysis in Rotating Machinery: A Comprehensive Review. Heliyon 2023, 9, e17584. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Jaen-Cuellar, A.Y.; Perez-Cruz, A.; Elvira-Ortiz, D.A. Detection of Inter-Turn Short Circuits in Induction Motors under the Start-Up Transient by Means of an Empirical Wavelet Transform and Self-Organizing Map. Machines 2023, 11, 958. [Google Scholar] [CrossRef]
- Arellano-Espitia, F.; Delgado-Prieto, M.; Martínez-Viol, V.; Saucedo-Dorantes, J.-J.; Osornio-Rios, R.A. Diagnosis Electromechanical System by Means CNN and SAE: An Interpretable-Learning Study. In Proceedings of the 2022 IEEE 5th International Conference on Industrial Cyber-Physical Systems (ICPS), Coventry, UK, 24–26 May 2022; pp. 1–6. [Google Scholar]
- Chen, M.; Shao, H.; Dou, H.; Li, W.; Liu, B. Data Augmentation and Intelligent Fault Diagnosis of Planetary Gearbox Using ILoFGAN Under Extremely Limited Samples. IEEE Trans. Reliab. 2023, 72, 1029–1037. [Google Scholar] [CrossRef]
- Ding, A.; Qin, Y.; Wang, B.; Cheng, X.; Jia, L. An Elastic Expandable Fault Diagnosis Method of Three-Phase Motors Using Continual Learning for Class-Added Sample Accumulations. IEEE Trans. Ind. Electron. 2023, 71, 7896–7905. [Google Scholar] [CrossRef]
- Choudhary, A.; Mian, T.; Fatima, S.; Panigrahi, B.K. Passive Thermography Based Bearing Fault Diagnosis Using Transfer Learning With Varying Working Conditions. IEEE Sens. J. 2023, 23, 4628–4637. [Google Scholar] [CrossRef]
- Akhtar, S.; Adeel, M.; Iqbal, M.; Namoun, A.; Tufail, A.; Kim, K.-H. Deep Learning Methods Utilization in Electric Power Systems. Energy Rep. 2023, 10, 2138–2151. [Google Scholar] [CrossRef]
- Liu, L.; Zhi, Z.; Zhang, H.; Guo, Q.; Peng, Y.; Liu, D. Related Entropy Theories Application in Condition Monitoring of Rotating Machineries. Entropy 2019, 21, 1061. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, Z.; Liang, X.; Si, S. The Entropy Algorithm and Its Variants in the Fault Diagnosis of Rotating Machinery: A Review. IEEE Access 2018, 6, 66723–66741. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Si, S.; Huang, S. Entropy Based Fault Classification Using the Case Western Reserve University Data: A Benchmark Study. IEEE Trans. Reliab. 2020, 69, 754–767. [Google Scholar] [CrossRef]
- Huo, Z.; Martinez-Garcia, M.; Zhang, Y.; Yan, R.; Shu, L. Entropy Measures in Machine Fault Diagnosis: Insights and Applications. IEEE Trans. Instrum. Meas. 2020, 69, 2607–2620. [Google Scholar] [CrossRef]
- Leite, G.D.N.P.; Araújo, A.M.; Rosas, P.A.C.; Stosic, T.; Stosic, B. Entropy Measures for Early Detection of Bearing Faults. Phys. Stat. Mech. Its Appl. 2019, 514, 458–472. [Google Scholar] [CrossRef]
- Wan, S.; Zhang, X. Teager Energy Entropy Ratio of Wavelet Packet Transform and Its Application in Bearing Fault Diagnosis. Entropy 2018, 20, 388. [Google Scholar] [CrossRef]
- Fu, L.; Zhu, T.; Zhu, K.; Yang, Y. Condition Monitoring for the Roller Bearings of Wind Turbines under Variable Working Conditions Based on the Fisher Score and Permutation Entropy. Energies 2019, 12, 3085. [Google Scholar] [CrossRef]
- Ramteke, D.S.; Pachori, R.B.; Parey, A. Automated Gearbox Fault Diagnosis Using Entropy-Based Features in Flexible Analytic Wavelet Transform (FAWT) Domain. J. Vib. Eng. Technol. 2021, 9, 1703–1713. [Google Scholar] [CrossRef]
- Wang, X.; Si, S.; Li, Y. Hierarchical Diversity Entropy for the Early Fault Diagnosis of Rolling Bearing. Nonlinear Dyn. 2022, 108, 1447–1462. [Google Scholar] [CrossRef]
- Yuan, X.; Fan, Y.; Zhou, C.; Wang, X.; Zhang, G. Research on Twin Extreme Learning Fault Diagnosis Method Based on Multi-Scale Weighted Permutation Entropy. Entropy 2022, 24, 1181. [Google Scholar] [CrossRef] [PubMed]
- Cao, W.; Li, C.; Li, Z.; Wang, S.; Pang, H. Research on Low-Resistance Grounding Fault Line Selection Based on VMD with PE and K-Means Clustering Algorithm. Math. Probl. Eng. 2022, 2022, e5360302. [Google Scholar] [CrossRef]
- Kamiński, M.M. On Shannon Entropy Computations in Selected Plasticity Problems. Int. J. Numer. Methods Eng. 2021, 122, 5128–5143. [Google Scholar] [CrossRef]
- Altaf, S.; Soomro, M.W.; Mehmood, M.S. Fault Diagnosis and Detection in Industrial Motor Network Environment Using Knowledge-Level Modelling Technique. Model. Simul. Eng. 2017, 2017, e1292190. [Google Scholar] [CrossRef]
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K.; Williams, B.W. Induction Motor Broken Rotor Bar Fault Detection Techniques Based on Fault Signature Analysis—A Review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Feng, G.; Hu, N.; Mones, Z.; Gu, F.; Ball, A.D. An Investigation of the Orthogonal Outputs from an On-Rotor MEMS Accelerometer for Reciprocating Compressor Condition Monitoring. Mech. Syst. Signal Process. 2016, 76–77, 228–241. [Google Scholar] [CrossRef]
- Xu, Y.; Tang, X.; Feng, G.; Wang, D.; Ashworth, C.; Gu, F.; Ball, A. Orthogonal On-Rotor Sensing Vibrations for Condition Monitoring of Rotating Machines. J. Dyn. Monit. Diagn. 2021, 1, 29–36. [Google Scholar] [CrossRef]
- Ramteke, D.S.; Parey, A.; Pachori, R.B. A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform. Machines 2023, 11, 1055. [Google Scholar] [CrossRef]
- Jamil, M.A.; Khanam, S. Influence of One-Way ANOVA and Kruskal–Wallis Based Feature Ranking on the Performance of ML Classifiers for Bearing Fault Diagnosis. J. Vib. Eng. Technol. 2023. [Google Scholar] [CrossRef]
- Braga, J.A.P.; Andrade, A.R. Multivariate Statistical Aggregation and Dimensionality Reduction Techniques to Improve Monitoring and Maintenance in Railways: The Wheelset Component. Reliab. Eng. Syst. Saf. 2021, 216, 107932. [Google Scholar] [CrossRef]
- Hu, Q.; Si, X.-S.; Zhang, Q.-H.; Qin, A.-S. A Rotating Machinery Fault Diagnosis Method Based on Multi-Scale Dimensionless Indicators and Random Forests. Mech. Syst. Signal Process. 2020, 139, 106609. [Google Scholar] [CrossRef]
- Tripanpitak, K.; Viriyavit, W.; Huang, S.Y.; Yu, W. Classification of Pain Event Related Potential for Evaluation of Pain Perception Induced by Electrical Stimulation. Sensors 2020, 20, 1491. [Google Scholar] [CrossRef] [PubMed]
- Rostami, M.; Forouzandeh, S.; Berahmand, K.; Soltani, M. Integration of Multi-Objective PSO Based Feature Selection and Node Centrality for Medical Datasets. Genomics 2020, 112, 4370–4384. [Google Scholar] [CrossRef]
- Wan, H.; Wang, H.; Scotney, B.; Liu, J.; Ng, W.W.Y. Within-Class Multimodal Classification. Multimed. Tools Appl. 2020, 79, 29327–29352. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element under Evaluation | Studied Condition | Assigned Label | Description | Picture |
|---|---|---|---|---|
| Gearbox (GB) | GB with 0% of wear | GB0 | The 4:1 GB is healthy, and the driven (72 teeth) and driver (18 teeth) gears are in perfect condition. |  |
| GB with 25% of wear | GB25 | Uniform wear is artificially induced to the driven gear until all teeth are worn within 25% of the original condition. |  | |
| GB with 50% of wear | GB50 | Uniform wear is artificially induced to the driven gear until all teeth are worn within 50% of the original condition. |  | |
| GB with 75% of wear | GB75 | Uniform wear is artificially induced to the driven gear until all teeth are worn within 75% of the original condition. |  | |
| Induction motor (IM) | Healthy IM | HLT | The IM is healthy, and all the elements of the IM are in perfect condition. |  |
| Bearing defect | BD | The outer bearing race in a 6205 bearing is artificially generated by drilling a through-hole with a 1.191 mm diameter. |  | |
| Broken rotor bar | BRB | A hole with 14 mm of depth is drilled in an IM rotor to completely break a rotor bar and to produce artificial damage. |  | |
| Unbalance | UNB | An external mass (bolt) is attached to the rigid coupling that links the IM to the GB to produce an artificial unbalanced condition. |  | |
| Misalignment | MIS | The free end of the IM is displaced to generate an angular misalignment of about 6 degrees. |  |
| Entropy Features | Physical Magnitude | Supply Electrical Frequencies of Operation | |||
|---|---|---|---|---|---|
| 5 Hz | 15 Hz | 50 Hz | 60 Hz | ||
| SpecEn | |||||
| PermEn | |||||
| SampEn | |||||
| ApEn | |||||
| FuzzEn | |||||
| ReEn | |||||
| Supply Electrical Frequencies of Operation | |||||||
|---|---|---|---|---|---|---|---|
| 5 Hz | 15 Hz | ||||||
| Entropy Features | Physical Magnitude | 0% vs. 25% | 0% vs. 50% | 0% vs. 75% | 0% vs. 25% | 0% vs. 50% | 0% vs. 75% |
| SpecEn | 0.13 | 513.29 | 0.05 | 1.08 | 0.68 | 0.68 | |
| 0.00 | 20.07 | 0.00 | 13.05 | 349.14 | 0.12 | ||
| 0.21 | 213.38 | 115.88 | 0.01 | 0.00 | 0.00 | ||
| PermEn | 0.00 | 0.00 | 0.18 | 0.03 | 0.38 | 0.02 | |
| 0.00 | 13.67 | 0.33 | 0.04 | 113.63 | 0.45 | ||
| 0.01 | 0.22 | 0.00 | 0.13 | 0.04 | 0.01 | ||
| SampEn | 0.00 | 0.10 | 1.20 | 2.41 | 0.00 | 2.26 | |
| 0.00 | 0.08 | 0.00 | 0.03 | 88.19 | 0.31 | ||
| 0.02 | 0.01 | 0.04 | 0.00 | 0.00 | 0.24 | ||
| ApEn | 0.61 | 13.71 | 0.23 | 0.01 | 0.20 | 16.00 | |
| 0.01 | 6.80 | 0.14 | 0.03 | 190.27 | 0.10 | ||
| 0.02 | 0.01 | 0.08 | 0.00 | 0.00 | 0.17 | ||
| FuzzEn | 21.05 | 1480.97 | 31.14 | 1.50 | 20,259.24 | 381.99 | |
| 0.01 | 0.91 | 10.34 | 856.53 | 12,493.92 | 3160.64 | ||
| 0.02 | 0.07 | 0.00 | 0.02 | 0.10 | 12.86 | ||
| ReEn | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| Supply Electrical Frequencies of Operation | |||||||
|---|---|---|---|---|---|---|---|
| 50 Hz | 60 Hz | ||||||
| Entropy Features | Physical Magnitude | 0% vs. 25% | 0% vs. 50% | 0% vs. 75% | 0% vs. 25% | 0% vs. 50% | 0% vs. 75% |
| SpecEn | 113.05 | 73.85 | 12.61 | 0.07 | 5.82 | 4.66 | |
| 72.75 | 187.76 | 0.79 | 0.00 | 2.04 | 30.72 | ||
| 20,062.81 | 5.38 | 0.22 | 3460.57 | 246.86 | 3.67 | ||
| PermEn | 173.48 | 6.91 | 481.62 | 6.42 | 0.61 | 0.71 | |
| 11.03 | 18.68 | 3.20 | 0.00 | 0.00 | 8.24 | ||
| 1096.29 | 1.73 | 0.04 | 466.80 | 63.29 | 0.29 | ||
| SampEn | 0.53 | 0.00 | 1.78 | 0.13 | 0.43 | 0.03 | |
| 7.25 | 10.61 | 44.39 | 0.42 | 19.83 | 21.16 | ||
| 42.42 | 0.00 | 0.00 | 21.13 | 0.57 | 0.00 | ||
| ApEn | 22.30 | 2.44 | 4.83 | 30.91 | 29.19 | 1.87 | |
| 131.91 | 0.32 | 1844.60 | 1.17 | 116.48 | 384.40 | ||
| 46.03 | 0.00 | 0.00 | 43.97 | 1.05 | 0.00 | ||
| FuzzEn | 0.63 | 1.68 | 1.07 | 26.65 | 41.89 | 0.06 | |
| 33,901.59 | 1138.96 | 66,594.98 | 46.41 | 971.21 | 23,643.02 | ||
| 0.02 | 3.07 | 196.82 | 0.52 | 0.00 | 0.03 | ||
| ReEn | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| Entropy Feature | Signals under Analysis | ||
|---|---|---|---|
| SpecEn | 1 | 7 | 13 |
| PermEn | 2 | 8 | 14 |
| SampEn | 3 | 9 | 15 |
| ApEn | 4 | 10 | 16 |
| FuzzEn | 5 | 11 | 17 |
| RenyiEn | 6 | 12 | 18 |
| Supply Electrical Frequencies of Operation | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 5 Hz | 15 Hz | 50 Hz | 60 Hz | ||||||
| Combined Features | Combined Features | Combined Features | Combined Features | ||||||
| Faced conditions | GB0 vs. GB25 | 13 | 5, 13, 17 | 363 | 5, 7, 11 | 39,594 | 11, 13, 14 | 3119 | 2, 13, 14 |
| 12 | 5, 13, 14 | 341 | 7, 8, 11 | 37,972 | 11, 13, 16 | 3115 | 12, 13, 14 | ||
| 11 | 5, 13, 16 | 340 | 4, 7, 11 | 37,176 | 11, 13, 15 | 3003 | 2, 12, 13 | ||
| GB0 vs. GB50 | 1509 | 1, 5, 13 | 27,166 | 5, 11, 12 | 1037 | 1, 7, 11 | 777 | 11, 12, 13 | |
| 1339 | 1, 5, 8 | 26,691 | 5, 6, 11 | 862 | 7, 11, 14 | 771 | 1, 11, 13 | ||
| 1339 | 1, 5, 17 | 26,618 | 4, 5, 11 | 862 | 1, 8, 11 | 769 | 2, 11, 13 | ||
| GB0 vs. GB75 | 152 | 5, 11, 13 | 2975 | 4, 5, 11 | 22,278 | 1, 10, 11 | 11,637 | 9, 11, 12 | |
| 142 | 5, 13, 17 | 2891 | 5, 11, 15 | 22,207 | 10, 11, 12 | 11,514 | 11, 12, 13 | ||
| 142 | 5, 13, 16 | 2882 | 5, 11, 16 | 20,742 | 1, 11, 12 | 10,910 | 11, 12, 15 | ||
| Best-ranked features | 4, 5, 6, 7, 8, 11, 12, 15, 16 | 1, 5, 8, 11, 13, 14, 16,17 | 1, 7, 8, 10, 11, 12, 13, 4, 15, 16 | 1, 2, 9, 11, 12, 13, 14, 15 | |||||
| Entropy Features | Physical Magnitude | Supply Electrical Frequencies of Operation | |||
|---|---|---|---|---|---|
| 5 Hz | 15 Hz | 50 Hz | 60 Hz | ||
| SpecEn | |||||
| PermEn | |||||
| SampEn | |||||
| ApEn | |||||
| FuzzEn | |||||
| ReEn | |||||
| Supply Electrical Frequencies of Operation | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 5 Hz | 15 Hz | ||||||||
| Entropy Features | Physical Magnitude | HLT vs. BD | HLT vs. BRB | HLT vs. UNB | HLT vs. MIS | HLT vs. BD | HLT vs. BRB | HLT vs. UNB | HLT vs. MIS |
| SpecEn | 0.04 | 0.03 | 0.00 | 0.00 | 0.09 | 23.79 | 2.62 | 0.49 | |
| 0.07 | 0.02 | 0.00 | 0.00 | 0.03 | 1.53 | 0.01 | 24.07 | ||
| 0.39 | 0.12 | 0.47 | 0.28 | 0.00 | 0.01 | 0.00 | 2.05 | ||
| PermEn | 0.01 | 0.00 | 0.01 | 0.00 | 0.00 | 1.32 | 0.00 | 0.30 | |
| 0.00 | 0.01 | 0.00 | 0.00 | 0.01 | 2.64 | 0.00 | 0.36 | ||
| 0.00 | 0.00 | 0.03 | 0.00 | 0.01 | 0.01 | 0.03 | 0.19 | ||
| SampEn | 0.04 | 0.02 | 0.00 | 0.02 | 0.00 | 0.00 | 0.01 | 0.00 | |
| 0.00 | 0.62 | 0.01 | 0.00 | 0.09 | 0.00 | 0.00 | 0.03 | ||
| 0.00 | 0.00 | 0.42 | 0.01 | 0.00 | 0.12 | 0.00 | 0.00 | ||
| ApEn | 0.03 | 0.13 | 0.00 | 0.02 | 0.00 | 0.24 | 0.01 | 0.01 | |
| 0.00 | 3.87 | 0.24 | 0.01 | 0.11 | 0.00 | 0.01 | 0.09 | ||
| 0.00 | 0.00 | 0.34 | 0.00 | 0.00 | 0.10 | 0.00 | 0.00 | ||
| FuzzEn | 0.81 | 4.30 | 0.08 | 0.10 | 0.17 | 390.51 | 0.00 | 0.00 | |
| 0.84 | 24.87 | 0.28 | 0.09 | 23.30 | 253.30 | 73.93 | 47.41 | ||
| 0.00 | 0.00 | 0.85 | 0.00 | 0.00 | 1.35 | 0.00 | 0.04 | ||
| ReEn | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| Supply Electrical Frequencies of Operation | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 50 Hz | 60 Hz | ||||||||
| Entropy Features | Physical Magnitude | HLT vs. BD | HLT vs. BRB | HLT vs. UNB | HLT vs. MIS | HLT vs. BD | HLT vs. BRB | HLT vs. UNB | HLT vs. MIS |
| SpecEn | 41.67 | 214.54 | 350.44 | 0.00 | 3.68 | 15.01 | 0.92 | 20.53 | |
| 0.00 | 108.23 | 75.44 | 14.62 | 0.98 | 27.19 | 1.98 | 2.48 | ||
| 0.00 | 0.00 | 0.00 | 312.18 | 0.81 | 0.00 | 0.01 | 366.36 | ||
| PermEn | 34.97 | 56.67 | 56.82 | 53.03 | 0.49 | 0.02 | 0.00 | 0.00 | |
| 12.16 | 29.87 | 7.80 | 19.29 | 0.01 | 0.00 | 0.39 | 7.94 | ||
| 0.00 | 0.11 | 0.00 | 49.79 | 1.32 | 0.07 | 0.01 | 75.69 | ||
| SampEn | 2.29 | 1.49 | 1.34 | 1.13 | 1.19 | 0.55 | 0.00 | 0.03 | |
| 0.01 | 0.00 | 13.47 | 0.74 | 2.56 | 17.94 | 0.00 | 0.00 | ||
| 0.00 | 0.00 | 0.00 | 0.16 | 0.00 | 0.00 | 0.00 | 0.34 | ||
| ApEn | 0.01 | 0.41 | 0.89 | 1.82 | 32.68 | 15.08 | 0.10 | 0.00 | |
| 22.96 | 0.00 | 1.51 | 78.88 | 2.54 | 69.22 | 0.00 | 102.33 | ||
| 15.92 | 0.01 | 0.33 | 0.35 | 0.00 | 2.10 | 0.00 | 0.28 | ||
| FuzzEn | 498.44 | 80.17 | 717.47 | 0.00 | 17.41 | 0.25 | 148.49 | 342.87 | |
| 16.41 | 0.13 | 719.71 | 61,932.78 | 21.66 | 23.48 | 2.07 | 4.54 | ||
| 0.00 | 0.01 | 0.01 | 0.07 | 0.00 | 0.00 | 0.00 | 0.62 | ||
| ReEn | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| Supply Electrical Frequencies of Operation | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 5 Hz | 15 Hz | 50 Hz | 60 Hz | ||||||
| Combined Features | Combined Features | Combined Features | Combined Features | ||||||
| Faced conditions | HLT vs. BD | 2.03 | 5, 11, 13 | 15 | 11, 12, 15 | 283 | 2, 5, 10 | 46 | 4, 5, 11 |
| 1.39 | 5, 11, 17 | 15 | 9, 11, 12 | 280 | 2, 5, 17 | 45 | 1, 4, 5 | ||
| 1.38 | 5, 7, 11 | 15 | 8, 11, 12 | 278 | 2, 5, 12 | 44 | 4, 5, 9 | ||
| HLT vs. BRB | 20.26 | 5, 11, 13 | 496 | 5, 8, 11 | 221 | 1, 5, 7 | 110 | 4, 5, 11 | |
| 20.19 | 5, 10, 11 | 458 | 5, 11, 15 | 213 | 2, 5, 7 | 108 | 1, 4, 5 | ||
| 19.05 | 5, 11, 17 | 446 | 5, 11, 16 | 208 | 1, 2, 7 | 105 | 4, 5, 9 | ||
| HLT vs. UNB | 1.23 | 11, 13, 17 | 32 | 4, 8, 11 | 1392 | 1, 5, 11 | 110 | 1, 5, 12 | |
| 1.12 | 13, 15, 17 | 31 | 3, 8, 11 | 1186 | 2, 5, 11 | 108 | 1, 5, 7 | ||
| 1.05 | 13, 16, 17 | 30 | 2, 8, 11 | 1086 | 5, 9, 11 | 105 | 5, 7, 12 | ||
| HLT vs. MIS | 0.40 | 5, 11, 13 | 52 | 5, 7, 11 | 18,882 | 11, 12, 14 | 713 | 5, 13, 14 | |
| 0.30 | 3, 5, 13 | 51 | 7, 11, 13 | 18,677 | 11, 12, 16 | 698 | 5, 10, 13 | ||
| 0.29 | 5, 13, 17 | 51 | 4, 7, 11 | 18,642 | 11, 12, 15 | 673 | 1, 5, 13 | ||
| Best-ranked features | 2, 3, 4, 5, 7, 8, 9, 11, 12, 13, 15, 16 | 3, 5, 7, 10, 11, 13, 15, 16, 17 | 1, 2, 5, 7, 9, 10, 11, 12, 14, 15, 16, 17 | 1, 4, 5, 7, 9, 10, 11, 12, 13, 14 | |||||
| Approach | Fault Detection in IMs Two Conditions: HLT and BRB | |
|---|---|---|
| Advantages | Disadvantages | |
| Classical approach FFT analysis |
|
|
| Data-driven approach Entropy features and LDA |
|
|
| Approach | Fault Detection in GBs Four Conditions: GB0, GB25, GB50, and GB75 | |
|---|---|---|
| Advantages | Disadvantages | |
| Data-driven approach Statistical features and LDA |
|
|
| Data-driven approach Entropy features and LDA |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaen-Cuellar, A.Y.; Saucedo-Dorantes, J.J.; Elvira-Ortiz, D.A.; Romero-Troncoso, R.d.J. Evaluation of Entropy Analysis as a Fault-Related Feature for Detecting Faults in Induction Motors and Their Kinematic Chain. Electronics 2024, 13, 1524. https://doi.org/10.3390/electronics13081524
Jaen-Cuellar AY, Saucedo-Dorantes JJ, Elvira-Ortiz DA, Romero-Troncoso RdJ. Evaluation of Entropy Analysis as a Fault-Related Feature for Detecting Faults in Induction Motors and Their Kinematic Chain. Electronics. 2024; 13(8):1524. https://doi.org/10.3390/electronics13081524
Chicago/Turabian StyleJaen-Cuellar, Arturo Y., Juan J. Saucedo-Dorantes, David A. Elvira-Ortiz, and Rene de J. Romero-Troncoso. 2024. "Evaluation of Entropy Analysis as a Fault-Related Feature for Detecting Faults in Induction Motors and Their Kinematic Chain" Electronics 13, no. 8: 1524. https://doi.org/10.3390/electronics13081524
APA StyleJaen-Cuellar, A. Y., Saucedo-Dorantes, J. J., Elvira-Ortiz, D. A., & Romero-Troncoso, R. d. J. (2024). Evaluation of Entropy Analysis as a Fault-Related Feature for Detecting Faults in Induction Motors and Their Kinematic Chain. Electronics, 13(8), 1524. https://doi.org/10.3390/electronics13081524