
Roll and Bank Estimation Using GPS/INS and Suspension Deflections †

Abstract
:1. Introduction
1.1. Rollover Algorithms
1.2. Outline
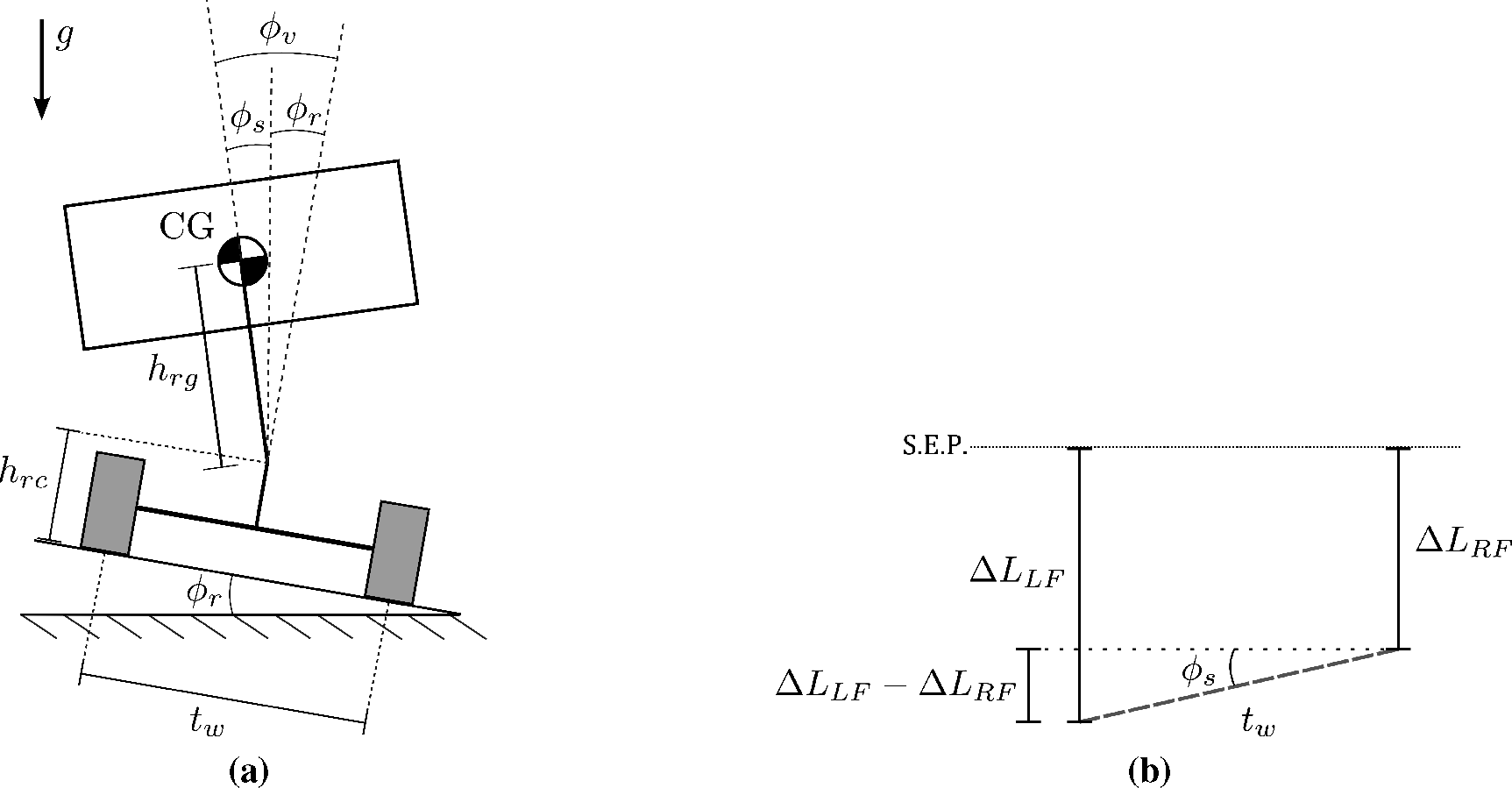
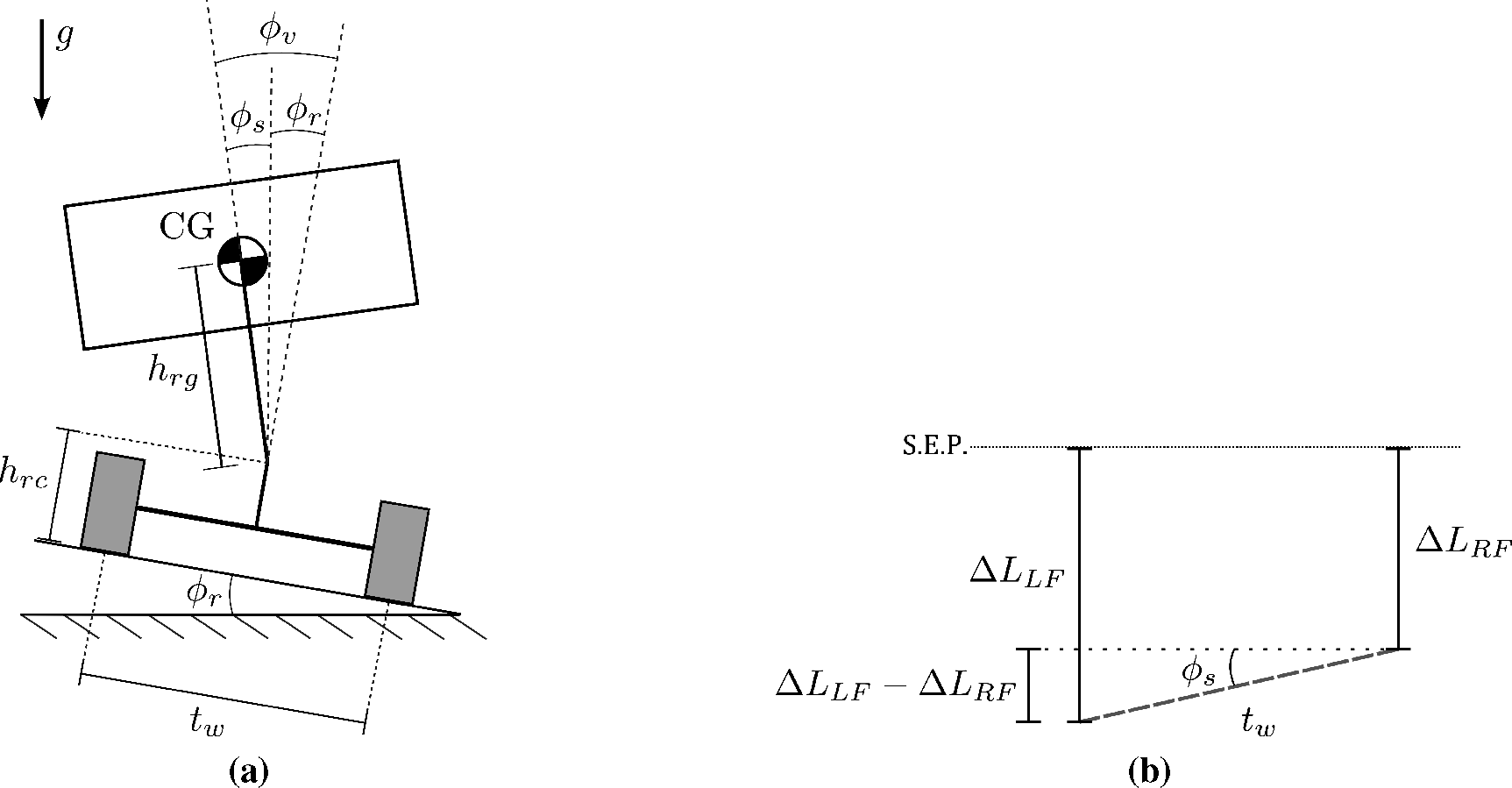
2. Roll, Relative Roll and Road Bank
2.1. Relative Roll
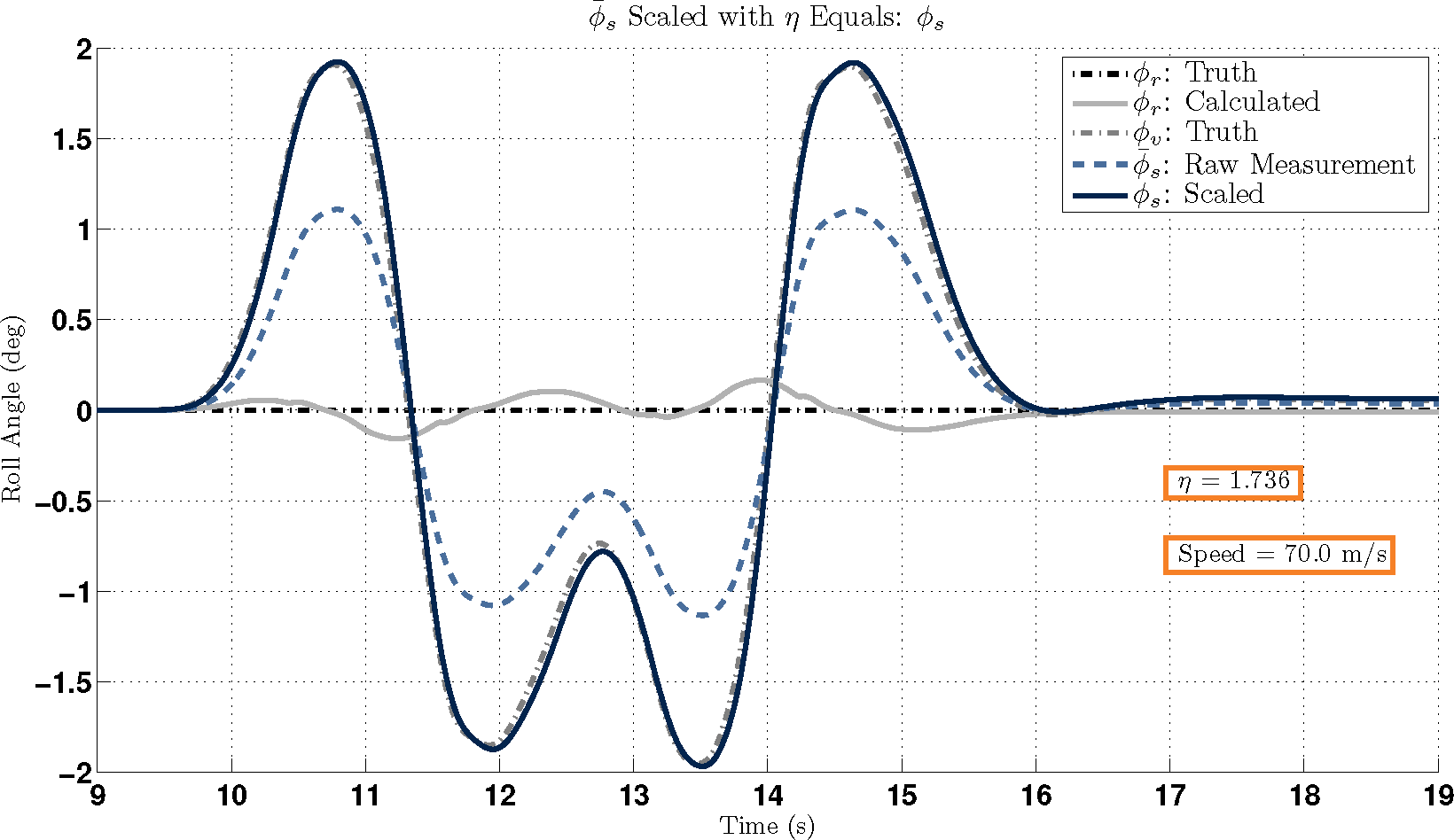
2.2. The Eta (η) Parameter for Roll Scaling
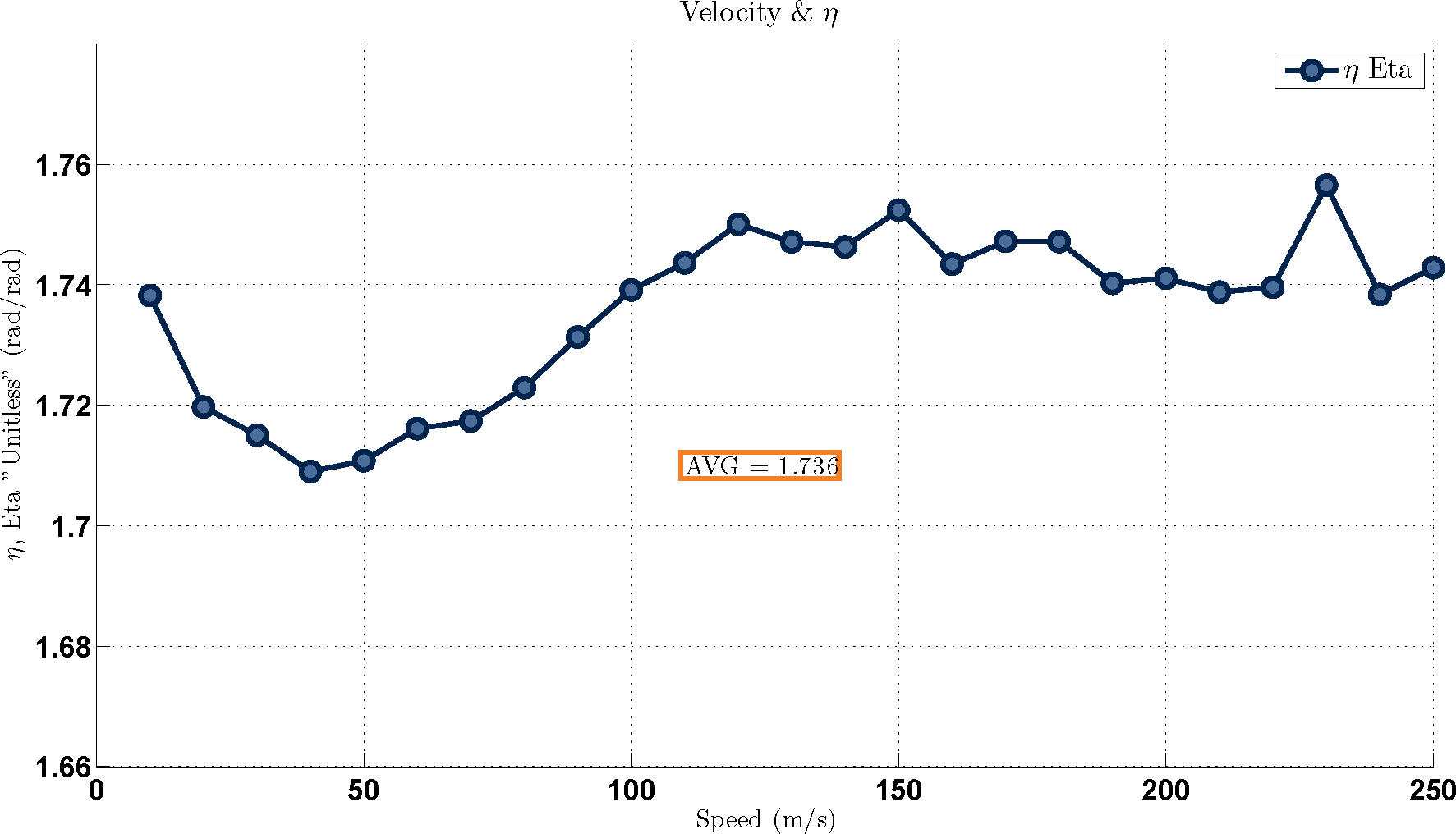
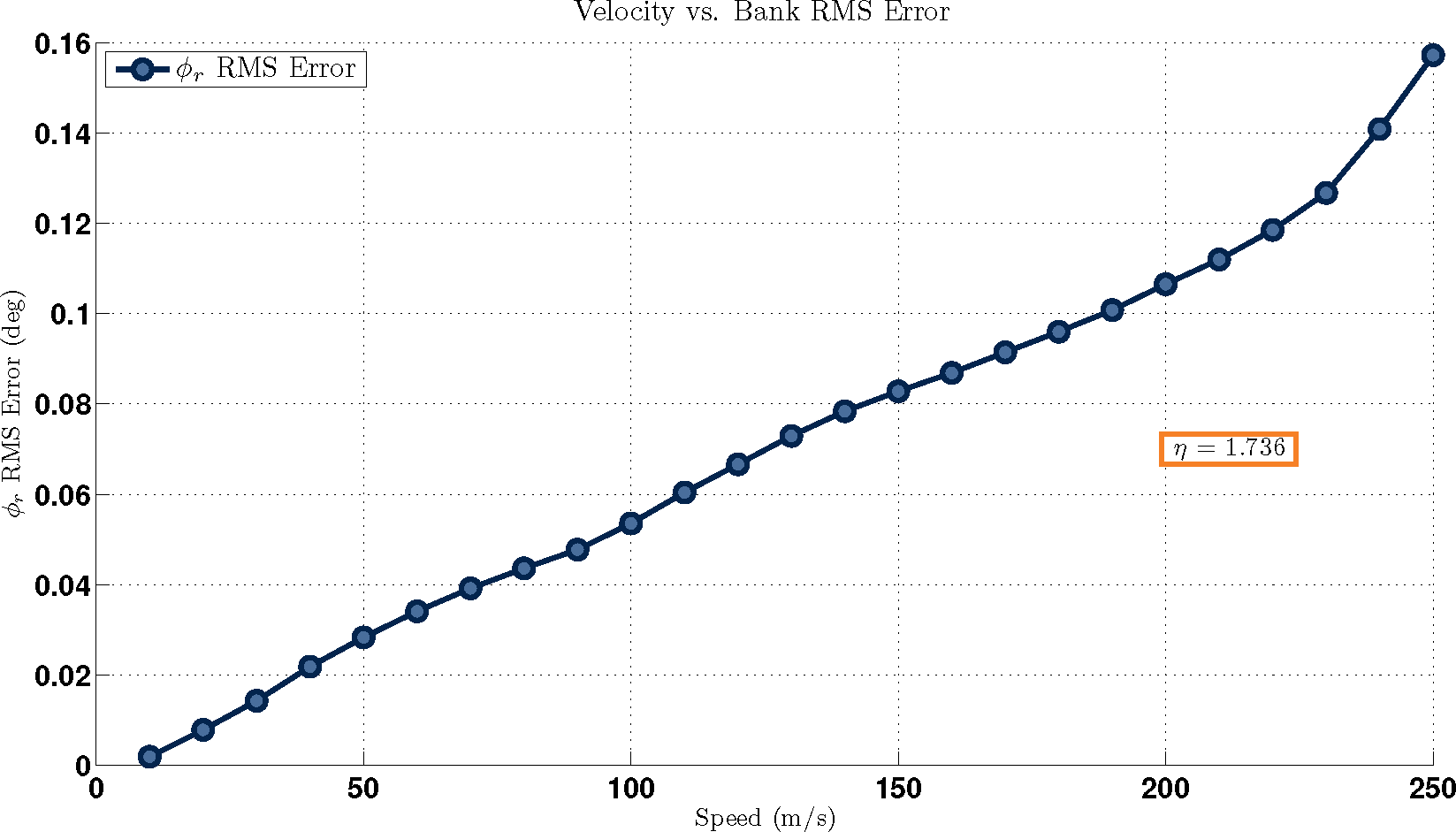
2.3. The Effect of Speed on η
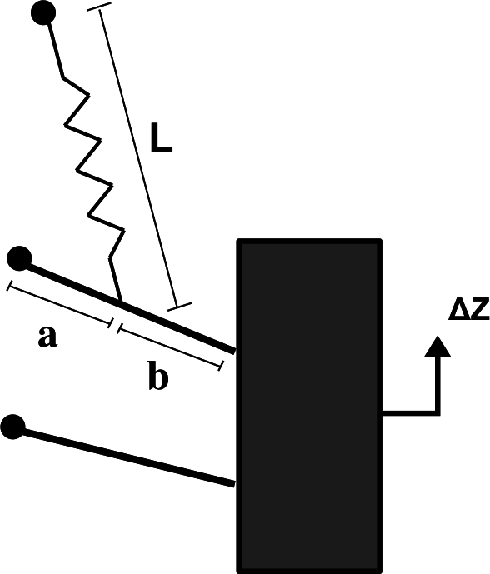
2.4. Eta (η) as the Kinematic Suspension Ratio
2.5. Eta (η) and Road Disturbances
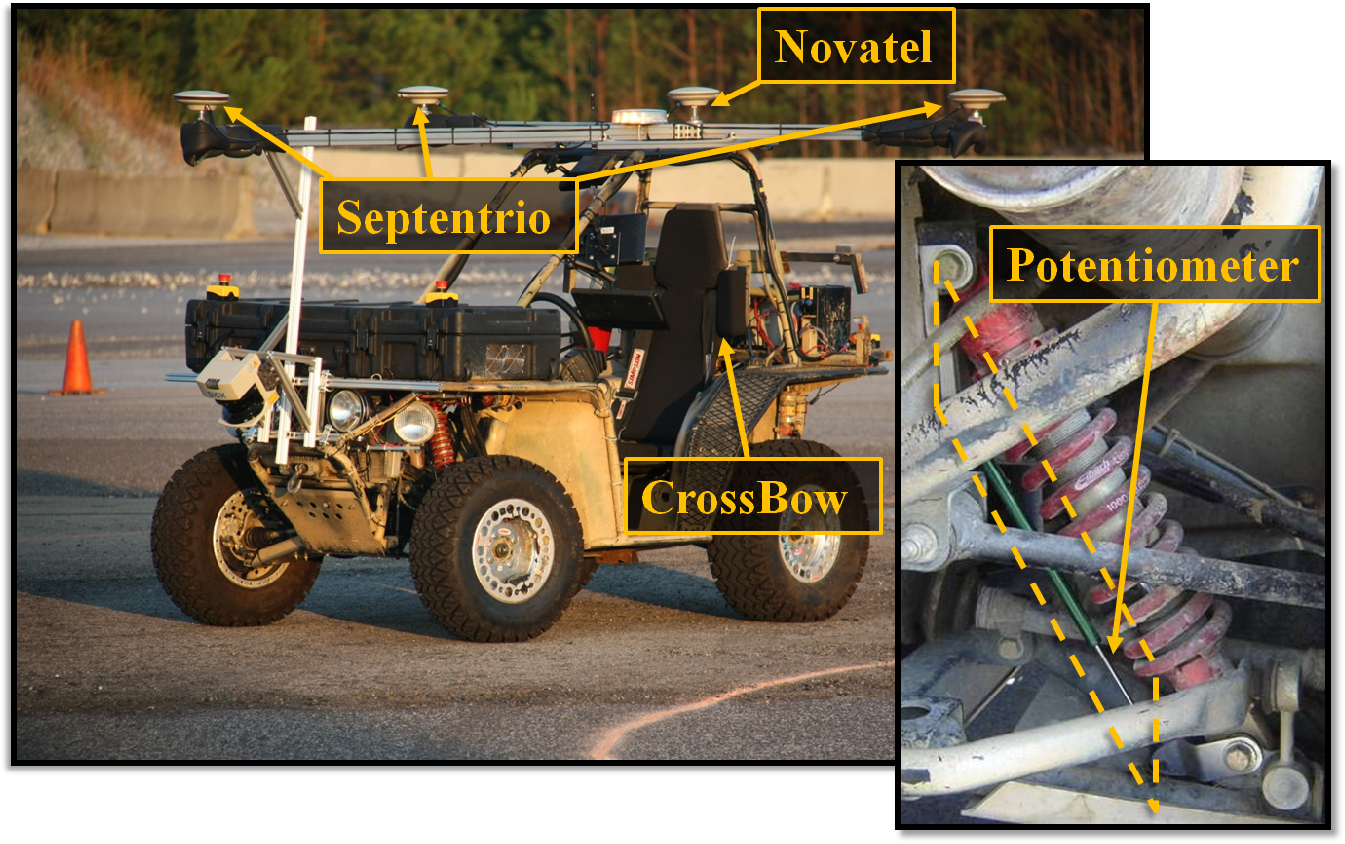
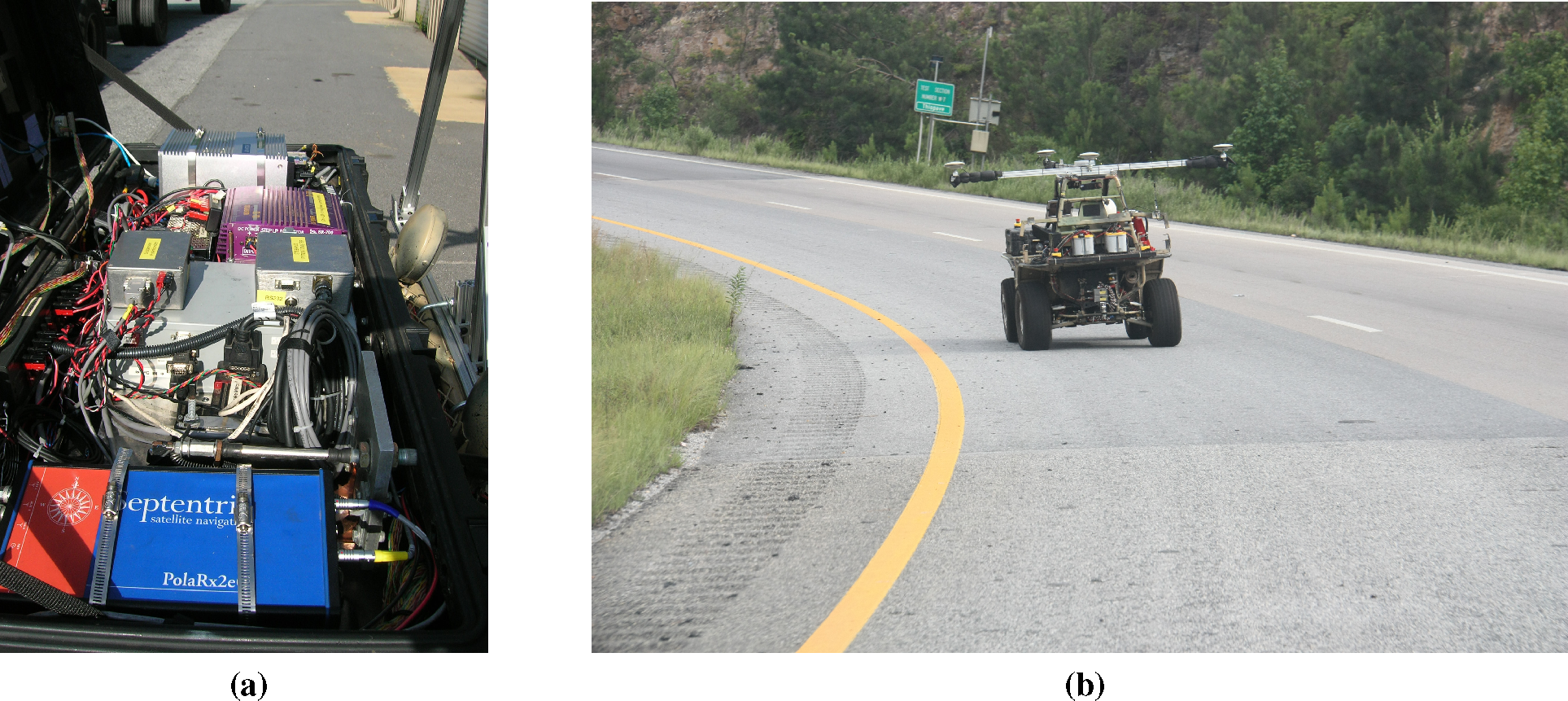
5. Experimental Setup
5.1. Sensor Mounting
5.2. Test Procedures
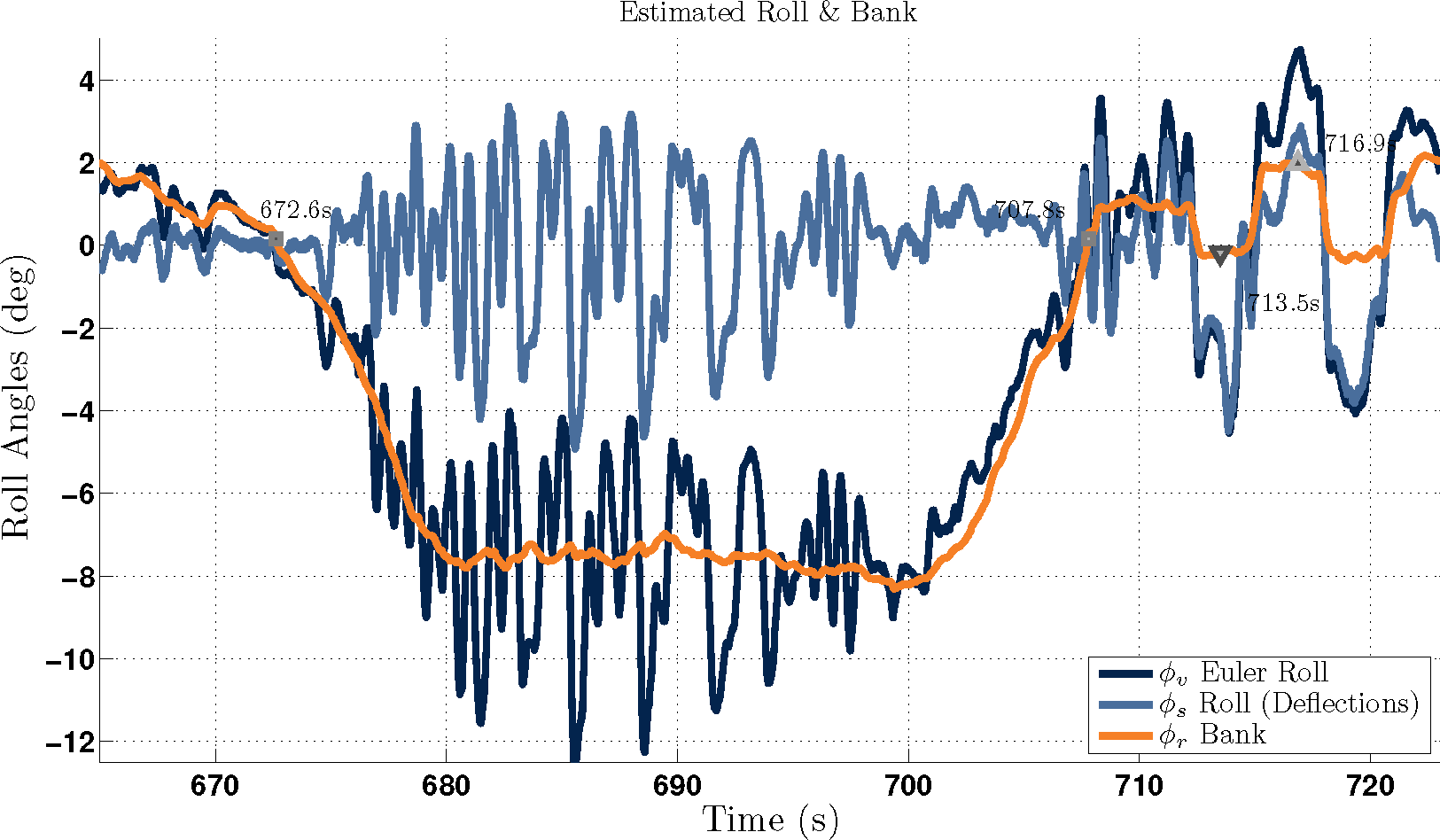
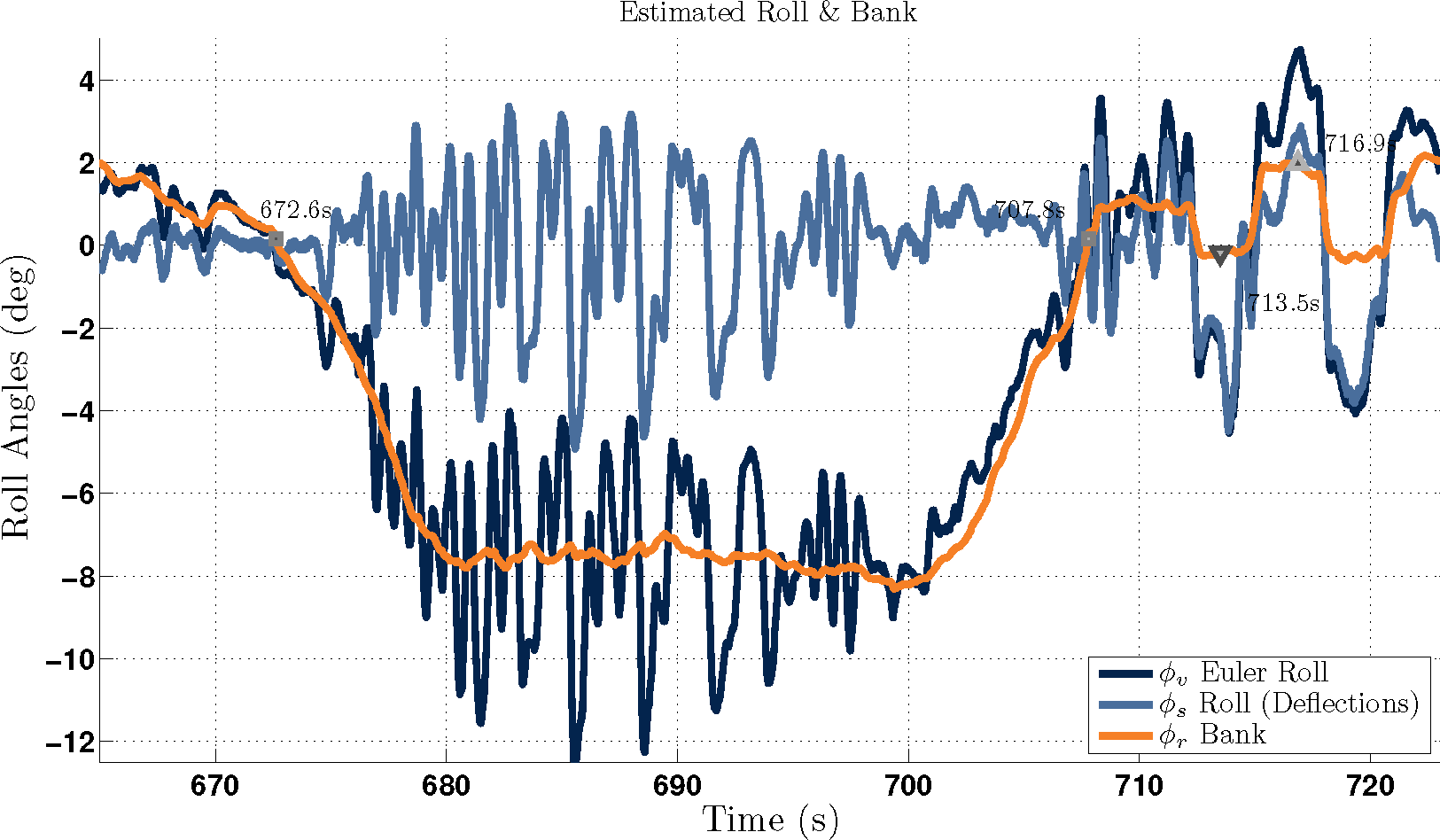
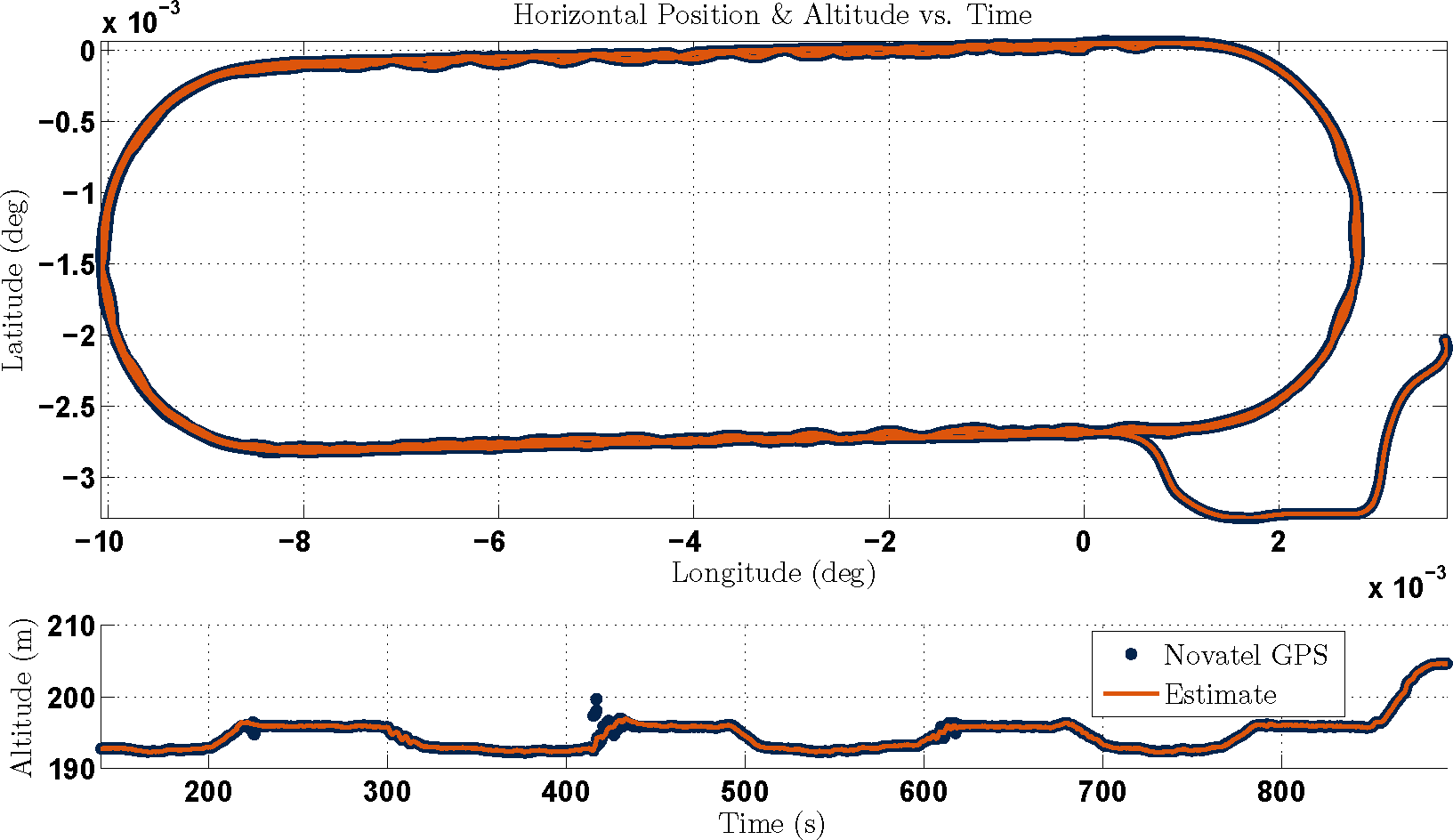
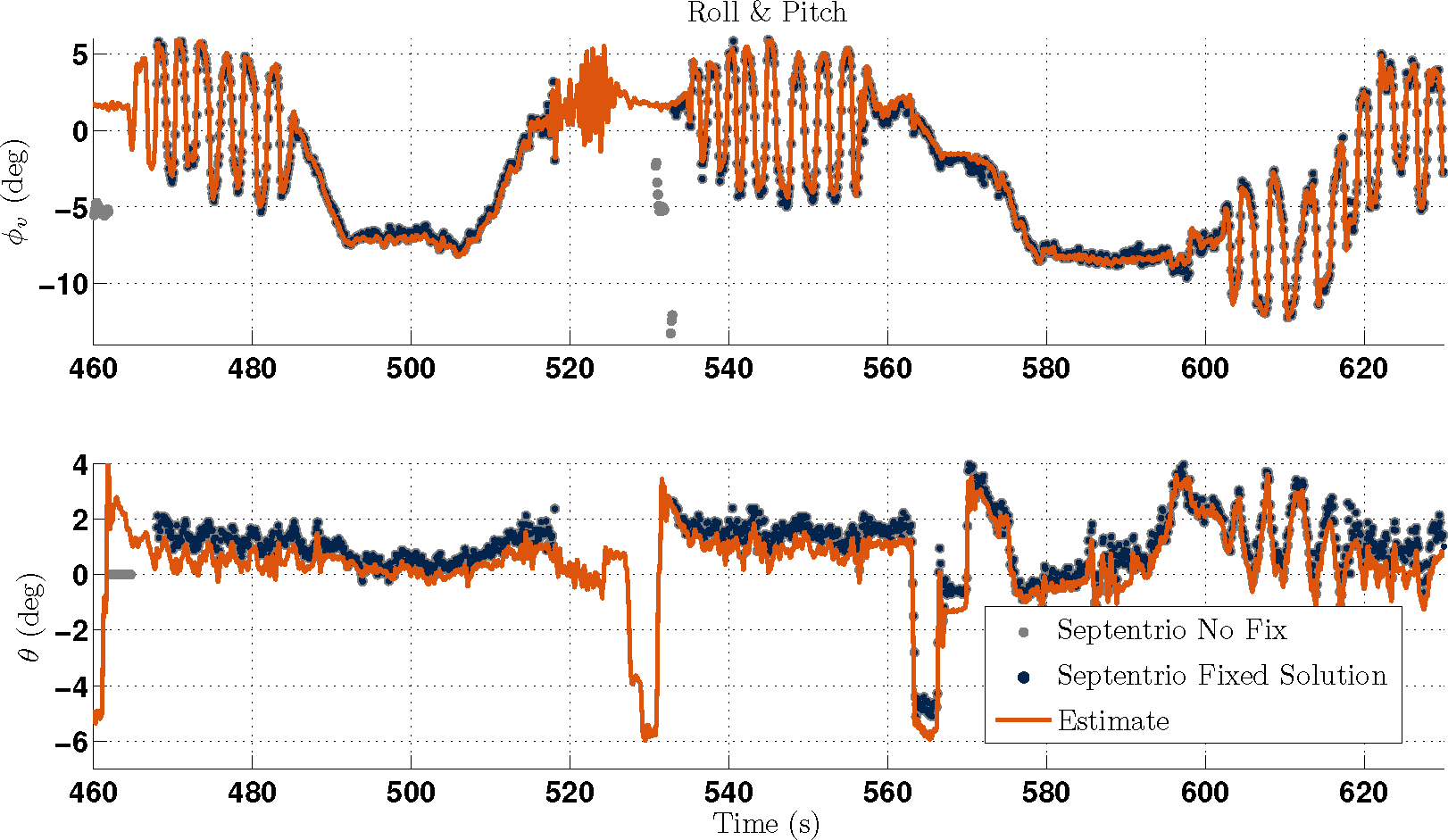
6. Results and Discussion
7. Conclusions
Acknowledgments
- The effect of vehicle speed on the roll scaling parameter is examined.
- A physical understanding of the roll scaling parameter based on the suspension arm measurement is presented.
- A kinematic model-based navigation EKF coupled with relative roll measurements is developed to estimate the road bank.
- Both the cascaded and coupled kinematic model-based navigation EKF approaches are validated with experimental data.
- The cascaded and coupled approaches are compared against each other with the experimental data.
- The coupled kinematic model-based navigation approach is recommended for road bank estimation due to the filtering of sensor noise that it provides
Author Contributions
Conflicts of Interest
References
- NHTSA. Fatality Analysis Reporting System (FARS) Encyclopedia; Technical Report; National Highway Traffic Safety Administration, 2012. Available online: http://www-fars.nhtsa.dot.gov/Main/index.aspx accessed on 29 January 2015.
- NHTSA, Rollover Data Special Study Final Report; Technical Report DOT HS 811 435, National Highway Traffic Safety Administration; National Highway Traffic Safety Administration: Washington, DC, WA, USA, 2011.
- Erke, A. Effects of electronic stability control (ESC) on accidents: A review of empirical evidence. Accid. Anal. Prev. 2008, 40, 167–173. [Google Scholar]
- National Highway Traffic Safety Administration, Federal Motor Vehicle Safety Standards; Electronic Stability Control Systems; Controls and Displays; FMVSS 126, Final Rule, Docket No. NHTSA 2007 27662; National Highway Traffic Safety Administration: Washington, DC, WA, USA, 2007.
- Marimuthu, R.; Jang, B.; Hong, S. A Study on SUV Parameters Sensitivity on Rollover Propensity. SAE Tech. Pap. 2006. [Google Scholar] [CrossRef]
- Bouton, N.; Lenain, R.; Thuilot, B.; Berducat, M. A Rollover Indicator Dedicated to All-Terrain Vehicles Including Sliding Effects and Pilot Behavior, Proceedings of Agricultural and Biosystems Engineering for a Sustainable World. International Conference on Agricultural Engineering, Hersonissos, Crete, Greece, 23–25 June 2008.
- Gáspár, P.; Szabó, Z.; Bokor, J. Brake control combined with prediction to prevent the rollover of heavy vehicles, Proceedings of the IFAC World Congress, Praha, Czech Republic, 4–8 July 2005.
- Rajamani, R.; Piyabongkarn, D.; Tsourapas, V.; Lew, J. Real-Time Estimation of Roll Angle and CG Height for Active Rollover Prevention Applications. Am. Control Conf. 2009. [Google Scholar] [CrossRef]
- Peters, S.C.; Iagnemma, K. An analysis of rollover stability measurement for high-speed mobile robots. Browse Conf. Publ. 2006. [Google Scholar] [CrossRef]
- Ryu, J.; Gerdes, J. Estimation of vehicle roll and road bank angle, Proceedings of the American Control Conference, 30 June–2 July 2004; pp. 2110–2115.
- Hac, A.; Brown, T.; Martens, J. Detection of vehicle rollover. SAE Tech. Pap. 2004. [Google Scholar] [CrossRef]
- International Organization for Standardization, Passenger Cars–Test Track for a Severe Lane-Change Manoeuvre–Part 2: Obstacle Avoidance ISO 3888-2, 2011.
- Milliken, W.F.; Milliken, D.L. Race Car Vehicle Dynamics; Society of Automotive Engineers Warrendale: Warrendale, PA, USA, 1995; 400.
- Gleason, S.; Gebre-Egziabher, D. (Eds.) GNSS Applications and Methods; Artech House Publishers: Boston, MA, USA, 2009.
- Groves, P.D. (Ed.) Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House Publishers: Boston, MA, USA, 2008.
- Stengel, R.F. Optimal Control and Estimation; Courier Dover Publications: Mineola, NY, USA, 2012. [Google Scholar]
- Maybeck, P.S. Stochastic Models, Estimation and Control; Academic Press: New York, NY, USA, 1979; Volume 1–3. [Google Scholar]
- Gebre-Egziabher, D. Design and performance analysis of a low-cost aided dead reckoning navigator. PhD thesis, Citeseer, 2004. [Google Scholar]
- Ryan, J.G.; Bevly, D.M. On the Observability of Loosely Coupled Global Positioning System/Inertial Navigation System Integrations With Five Degree of Freedom and Four Degree of Freedom Inertial Measurement Units. Journal of Dynamic Systems, Measurement, and Control. 2014, 136, 021023. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Units |
|---|---|---|
| σa | 0.3 | m/s2 |
| σg | 0.3 | degrees/s |
| 0.01 | m/s2 | |
| 0.035 | degrees/s | |
| 1 | degrees |
| Name | Value | Units |
|---|---|---|
| τa | 500 | s |
| τg | 1,300 | s |
| τs | 1,000 | s |
| Name | Value | Units |
|---|---|---|
| σPos. Horz. | 0.0000052 | degrees |
| σPos. Z | 1 | m |
| σVel. Horz. | 0.05 | m/s |
| σPos. Z | 0.1 | ms |
| σDef | 0.0002 | m |
| rad |
| Name | Value | Units |
|---|---|---|
| 0.001 | rad | |
| 2.8 | m | |
| 0.1 | m/s | |
| 0.01 | rad | |
| 0.05 | rad | |
| 0.000001 | m/s2 | |
| 0.000001 | rad/s | |
| 0.0001 | degrees |
| Name | Value | Units |
|---|---|---|
| ϕv | 0.401 | degrees |
| θ | 0.570 | degrees |
| ψ | 0.577 | degrees |
| Name | Value | Units |
|---|---|---|
| ϕv | 0.422 | degrees |
| θ | 0.526 | degrees |
| ψ | 0.696 | degrees |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brown, L.S.; Bevly, D.M. Roll and Bank Estimation Using GPS/INS and Suspension Deflections. Electronics 2015, 4, 118-149. https://doi.org/10.3390/electronics4010118
Brown LS, Bevly DM. Roll and Bank Estimation Using GPS/INS and Suspension Deflections. Electronics. 2015; 4(1):118-149. https://doi.org/10.3390/electronics4010118
Chicago/Turabian StyleBrown, Lowell S., and David M. Bevly. 2015. "Roll and Bank Estimation Using GPS/INS and Suspension Deflections" Electronics 4, no. 1: 118-149. https://doi.org/10.3390/electronics4010118
APA StyleBrown, L. S., & Bevly, D. M. (2015). Roll and Bank Estimation Using GPS/INS and Suspension Deflections. Electronics, 4(1), 118-149. https://doi.org/10.3390/electronics4010118