Abstract
For high-power single-transmitter single-receiver wireless power transfer (STSRWPT) systems, the coils suffer from high voltage and current stresses. With increased power requirements, the coils become bottlenecks for power flow. To increase the power level, multiple-transmitter multiple-receiver wireless power transfer (MTMRWPT) systems with parallel circuits are developed that reduce the voltage and current stresses on the coils and improve power-handling capability. Firstly, an improved current distribution (ICD) control strategy is developed to simultaneously achieve high transfer efficiency, balanced current distribution and constant output voltage. Secondly, it is further shown that the ICD control strategy has the advantage that the currents at the transmitter coils are balanced and it reduces the control complexity simultaneously. Thirdly, an asynchronous particle swarm optimization (APSO) algorithm is applied to the ICD control strategy to verify the feasibility of the proposed control strategy. Lastly, a two-transmitter two-receiver wireless power transfer (WPT) system based on the ICD control strategy is proved to obtain an efficiency of more than 89.1% and provides the target output voltage 20 V with balanced current distribution.
1. Introduction
High-power wireless power transfer (WPT) systems are being widely used due to growing demand for fast charging technology and high-power transfer technology. High-power WPT system are applied to electric vehicles (EVs) [1,2,3], electric buses [4,5], trains [6,7] and other transportation vehicles like online electric vehicles (OLEV) [8,9,10]. However, high-power WPT systems suffer from several drawbacks that include: having large voltage and current stresses at the coils, limited magnetic field space due to application-specific coil sizes and shapes. WPT systems with multiple coils are developed for several applications. one such example is having receiver coils under the front and the rear of the car respectively that can sufficiently utilize chassis space [11]. In addition, multiple-transmitter multiple-receiver wireless power transfer (MTMRWPT) systems are applied to roadway powered electric vehicles to provide large lateral tolerance between the rail and pick-up coils [12]. Multiple transmitters based on electromagnetic cavity resonance are applied to simultaneously power multiple small receivers in a three dimensional volume of space [13].
In recent years, many studies have been carried out using various approaches to increase system efficiency. Some research [14,15] has increased system efficiency by introducing new compensation networks. A mixed-resonant coupling model is developed [14,15] to either improve the transfer efficiency or extend the transfer range, which finally achieves 85% efficiency at a distance of 10 cm. Resonators [6,16] are added for a short distance to enhance magnetic field coupling. However, this increases the distance between transmitter coil and receiver coil and causes weak magnetic coupling. Whereas, intermediate coils [17,18] are introduced to optimize the magnetic coupling. However, it is difficult to place intermediate coils between transmitter coil and receiver coil in applications like EVs. Some research [19,20,21] has chosen optimizing the magnetic coupling with high-permeability materials such as ferrites. However, the extra weight and volume make this an inappropriate solution for compact applications. Some research increased efficiency by operating converters at high frequency in the MHz range [22,23]. However, it is not suitable for high-power applications. In WPT systems, maximum efficiency is obtained when load resistances correspond to the impedance-matching condition [24,25]. However, the impedance-matching method is difficult to apply to MTMRWPT systems due to the complex mutual coupling and electric connection between coils. In [12] load resistances are separated at two equal resistances in a two-transmitter two-receiver WPT system to simplify the system, but it is only suitable for two groups of coils of similar parameters. It is a complex exercise to derive the maximum efficiency conditions in conventional MTMRWPT circuit models, there is a need for further developing mathematical models to study the MTMRWPT systems in detail.
Various topologies and control strategies have been developed to improve system efficiency. A two-transmitter and two-receiver circuit is developed with uncontrolled rectifiers at the secondary side [26]. This reduces the complexity of control, but fails to manipulate the equivalent load resistances. A buck circuit [27] is introduced to the secondary side to control the equivalent resistances However, this adds extra segments to the system and increases the overall power losses. WPT system introduces a buck-boost converter [28] to the secondary side to regulate the load resistances. When the system transfers 16 W to the load, the maximum efficiency is 78%. Moreover, a buck circuit is introduced at the primary side to manipulate the input voltage and a boost circuit to the secondary side [29] to manipulate the load. When the system supply 100 W, the obtained maximum system efficiency is 79%. Dual active bridges [30,31] are introduced to WPT system to manipulate the matching resistance so as to achieve high efficiency. The dual active bridges topology has the advantage of small conduction loss and the ability of manipulating the load resistances. Increased efficiency of 85.4% with a 468.6 W output power is obtained in [30], and 80.4% with a 18 W output power is obtained in [31] However, it is a complicated exercise for the MTMRWPT system to simultaneously achieve high efficiency and voltage regulation by removing the mutual coupling between receiver coils and separating the electrical connections at the secondary side.
Some research on single-transmitter multiple-receiver WPT (STMRWPT) systems is presented in [24,32,33,34,35,36]. A STMRWPT system is developed in [32] for portable devices which are of low-complexity receiver design. Resonant coupling systems [33] with multiple receivers are modeled with a simplified circuit model and resonant frequency splitting issue is observed in multiple receivers system. To maximize the efficiency in STMRWPT system, impedance matching theory is introduced to the STMRWPT system [24]. To increase system efficiency, metamaterials [34] are introduced to multiple receiver WPT system, where the efficiency is increased by about 20%. To provide high efficiency and target output power in a two-receiver WPT system, a control strategy based on simplified math model is proposed [35]. To meet the constant source supply, a load independent output voltage method [36] is proposed to satisfy the demands of different load devices. However, STMRWPT systems are mostly applied for portable devices which do not need accurate tuning. This hardly meets the power level demands of each receiver, and the efficiencies of the systems have to be accurately optimized. Besides, single transmitter would suffer from high current stress for high-power applications.
Some research focused on MTMRWPT systems in [12,33,37,38,39]. Cross-coupling between multiple transmitters or receivers is investigated in [37]. It reveals that the effective resonant frequency is changed because of cross-coupling and should be tuned accordingly. Moreover, the splitting frequency issues in multiple-coil WPT systems are observed in [33] and the chirp signals are used to spread and excited inductive multiple-transmitter multiple-receivers WPT system. To meet high-power demand, a new WPT topology based on LCL topology is presented to promote integration of multiple WPT applications [38]. However, it introduces extra intermediate circuits for the WPT system which cause inconvenience in field applications. MTMRWPT systems are developed in roadway-powered electric vehicles to provide higher power handling capacity and a large lateral tolerance [12]. However, the uncontrollable rectifiers are constructed at the secondary side and the receivers can not be controlled by the rectifier. The study in [39] develops a two-transmitter two-receiver WPT system to promote transmitter capacity and verifies that the same-side cross-coupling will lower system efficiency. However, the research only focuses on dual groups of coils with same parameters and multiple receivers with different parameters should be further studied. In addition, the approaches mentioned above have not solved the problems of maximum efficiency and balanced current distribution in multiple transmitters and receivers.
In this paper, an improved current distribution (ICD) control strategy is developed to address the challenges of delivering constant output voltage, improving current distribution, high-efficiency in power transfer through the MTMRWPT system. Besides, a detailed mathematical model of MTMRWPT systems is derived and analyzed, which is applicable for systems with multiple different receiver coils. An active bridge is introduced to the rectifiers to control the receivers. In this study, MTMRWPT systems are proposed to provide a higher power level and maximum utilization of space. The active bridges of transmitters are responsible for voltage regulation and current distribution, and the active bridges of receivers are responsible for resistance matching to provide high efficiency.
The organization of this paper is arranged as follows. Section 2 analyzes the mathematical model of the MTMRWPT system. Section 3 develops the ICD strategy to regulate output voltage, balance current distribution and operate under high efficiency. The asynchronous particle swarm optimization (APSO) method is introduced to the proposed control strategy to verify the proposed control strategy can reduce the control complexity in MTMRWPT systems. Simulation and experiment results are presented in Section 4. Finally, the conclusion is shown in Section 5.
2. Modeling of Multiple-Transmitter Multiple-Receiver Wireless Power Transfer (MTMRWPT) System and Best-Matching Resistances
This section describes a MTMRWPT system involving inductive coupling. For high-power single-transmitter single-receiver wireless power transfer (STSRWPT) systems, the coils suffer from high voltage and high current stresses. To solve the problem of improving the system power level, this research adopts the parallel circuits to improve the power level. Active bridge circuits are adopted to achieve both current distribution and maximum efficiency.
Figure 1a presents the schematic and equivalent circuits of the MTMRWPT system. Each coil group is composed of a transmitter coil and a receiver coil. For coil groups are placed far away from each other, the mutual inductances between each coil group are neglected. Ri1, Li1, and Ci1 represent the resistance, inductance, and compensation capacitance of the ith transmitter coil respectively; Ri2, Li2, and Ci2 represent the resistance, inductance, and compensation capacitance of the ith receiver coil respectively. Ro denotes the load resistance, Co denotes the filter capacitance and Uin denotes the input DC voltage. Qi1~Qi8 (i = 1, 2, …, n) are the gate drive signals of the converters of the ith group. Figure 2 shows the square-wave voltages and resonant currents waveforms in the MTMRWPT system. 2βi1 denote the conduction angle of the transmitter coils of, and ϕi1 denotes the phase difference between the fundamental component of the Ui1 square wave and resonant current Ii1. 2βi2 denote the conduction angle of the receiver coils of the system, and ϕi2 denotes the phase difference between the fundamental component of the Ui2 square wave and resonant current Ii2.
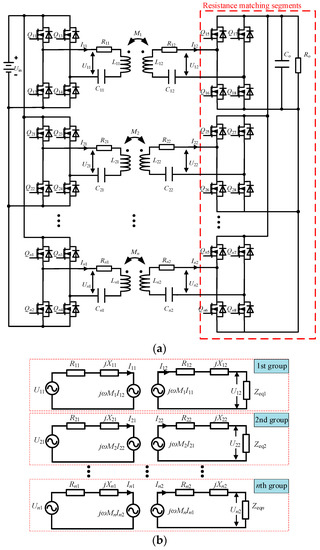
Figure 1.
Schematic and equivalent circuits of multiple-receiver wireless power transfer (WPT) system: (a) schematic circuit of multiple-receiver WPT system; (b) equivalent circuit of multiple-receiver WPT system.
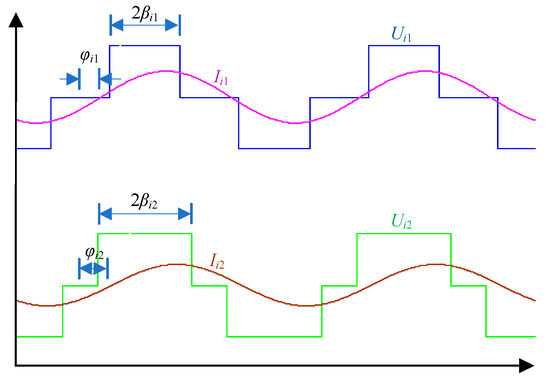
Figure 2.
Square-wave voltages and resonant currents waveforms in multiple-transmitter multiple-receiver wireless power transfer (MTMRWPT) system.
Since it is complicated to derive the maximum efficiency by combining all the parameters mentioned above, this research analyzes the MTMRWPT system by splitting the electrical circuit into various coil groups and derives the maximum efficiency of each split group. Figure 1b shows the equivalent circuit of the split group, and Zeqi denotes the equivalent load resistance of ith group.
In Figure 1b, Ui1 denotes the fundamental component of inverter voltage. By performing the Fourier decomposition, Ui1 is derived as:
Using the Kirchhoff voltage laws (KVLs), the equivalent mathematical model of the ith group in the MTMRWPT system can be derived as:
Supposing that the filter capacitance is large enough, the output voltage will remain unchanged, once the system achieves its steady state. Ui2 denotes the fundamental component of the inverter voltage in receiver coils is derived as:
Solving (1) and (2), the output voltage and currents are derived as follows:
The equivalent resistance of the matching resistance segment Reqi is derived as:
The input resistance Rini of ith group is:
Resistance Rri (i = 1, 2,…,n) is defined as follows to describe the resistance of receiver coils of the ith group:
Supposing there is no efficiency loss in resistance matching segments, the output voltage Uo satisfies:
The system efficiency η satisfies:
To solve the maximum efficiency of the systems, which is the best matching resistance control strategy, the βi1 and βi2 have to satisfy:
The solutions of (12) are difficult to derive by analytical calculation, it means that the best matching resistances are difficult to achieve. In this paper, a simplified solution is proposed to satisfy high-efficiency transfer demand.
3. Current Distribution and Improved Current Distribution (ICD) Control Strategy
3.1. Resistance-Matching Rules of ICD Control Strategy
Since, the system efficiency depends on the variables βi1 and βi2, it is difficult to directly derive the maximum efficiency by solving all the equations above. In this research, the matching resistance is adopted to achieve the maximum efficiency condition. If each group achieves its maximum efficiency, the maximum efficiency of overall system can be achieved. From [19], the matching resistance in STSRWPT system is obtained as follows:
In addition, make in each group, the system will achieve its maximum efficiency.
By solving (13), the βi2 can be derived as:
where, .
Supposing βi1 are set the same value, the efficiency no longer depends on the variables βi1 and Uin according to (11) and (13). Therefore, βi1 and Uin can be tuned to control the output voltage under the constraint condition (4), to assure the constant output voltage. βi2 are tuned to assure the system operates under high efficiency. For a MTMRWPT system, a control strategy has to be developed to satisfy both minimum current distribution condition and maximum efficiency condition. However, when βi1 are set the same value, the current distribution in multiple coils are unbalanced, and some coils may suffer from high current stress. To solve this problem, the ICD control strategy trades-off with a little efficiency loss to balance the current distribution in different coils. From detailed simulation studies and experimental results, this proves that the strategy achieves balancing of the current stresses and operation at high efficiency. In this control strategy, the βi2 are tuned to assure system operate under high efficiency and βi1 are tuned to control the current distribution and output voltage. Therefore, the system can be simplified to an optimized problem.
3.2. Currents and Voltages Distribution
Under the proposed control condition based on (14), the voltage and the current distribution are analyzed as follows:
Based on the ICD control strategy, the βi2 at the receiver are set as βi2best and βi1 are swept from 0° to 90° to balance the current distribution. The variation of voltage and current at both transmitter and receiver coils are listed as follows:
- (a)
- The voltages Ui1 at the transmitter coils change rapidly due to the variation of βi1. It is because the input voltage Uin remains unchanged and the βi1 sweep from 0° to 90°, and according to (1), the voltages Ui1 at the transmitter coils change rapidly due to the variation of βi1.
- (b)
- The voltages Ui2 at the receiver coils generally remain unchanged despite the variation of βi1. It is because based on the constant output voltage condition the output voltage Uo remains unchanged, and the βi2 has to remain unchanged based on (14) to provide high efficiency. Therefore, according to (3), the voltages Ui2 at the receiver coils generally remain unchanged.
- (c)
- The currents Ii1 at the transmitter coils remain unchanged generally despite the variation of βi1. This is because, based on Figure 1b, the currents Ii2 (i = 1, 2, …, n) follow (15).
Under full compensation condition, the jXi2 = 0 and Ii2Ri2 are comparatively too small compared to Ui2 so that equation (15) can be replaced by (16):
Ui2 remain generally unchanged based on previous description (b) and hence Ii2 are unchanged accordingly.
- (d)
- The currents Ii2 at the receiver coils vary rapidly due to the variation of βi1. It is because the output voltage Uo and βi2 remain unchanged, but the equivalent resistances Reqi of resistance matching segments vary when βi1 vary. The current Ii2 is sensitive to the variation of equivalent resistances Reqi, and the Ii2 vary rapidly accordingly.
For high-power level WPT systems, the unbalanced currents increase the current stress of coils. The currents Ii1 at the transmitter coils remain unchanged regardless of the variation of βi1, the control distribution variables Ii1 and Ii2 reduce to Ii1.
3.3. ICD Control Strategy
For MTMRWPT systems, a control strategy has to be developed to satisfy the minimum current distribution condition and maximum efficiency condition. Such a problem can be simplified to an optimized question.
The target of the ICD control strategy is to assure minimum current distribution, that is
For the proposed control strategy, the current distribution is generally balanced in transmitter coils of MTMRWPT system. The fitness function can be simplified to (18).
The constraint condition under such a control strategy is to satisfy the constant output voltage Uo according to (4).
The ICD control strategy can provide constant output voltage and balance the current distribution simultaneously. This is because in an n-transmitter n-receiver WPT system, the dimension of control variables βi1 and βi2 is 2n, and the dimension of controlled variables Ii1, Ii2 and Uo is (2n+1) totally. However, based on ICD control strategy, the βi2 are set as βi2, BEST to provide high efficiency, the control variables βi1 and βi2 are reduced to βi1, the dimension of which is n. Moreover, according to Section 3.2 (c), since Ii1 remain unchanged despite the variation of βi1 and are previously designed based on (16), the controlled variables Ii1, Ii2 and Uo are reduced to Ii2 and Uo, the dimension of which is (n+1). Furthermore, the current distribution focuses on the balanced current distribution which can be represented as , (i = 1, 2, …, n − 1). The dimension of current ratio ki is (n-1). Therefore, the actual controlled variables Ii1, Ii2 and Uo reduce to ki and Uo, the dimension of which is n totally. This is equal to the dimension of actual control variables βi1 which is n totally. Therefore, by controlling βi1, the ICD control strategy can control output voltage and current distribution simultaneously.
Otherwise, the efficiency of the system is controlled by βi2, and the output voltages and current distribution are cooperatively controlled by βi1.
For two transmitters and two receivers WPT systems, current index I12/I22 at the receiver coil changes more rapidly than I11/I21 at the transmitter coil with the change of βi1. Therefore, system control is simplified to control the current distribution in receivers, that is
Therefore, for two-transmitters two-receivers WPT systems, the ICD control strategy should satisfy the following conditions:
- (a)
- The βi2 satisfy the optimal matching resistances based on (14);
- (b)
- The current distribution satisfies ;
- (c)
- The output voltage equals Uo. In this study, the control variables are β12 and β22, the target variables are and Uo.
3.4. Asynchronous Particle Swarm Optimization (APSO)
As an evolutionary technique, particle swarm optimization (PSO) was proposed mainly for continuous optimization problems. In this paper, an APSO algorithm [40] is applied to search for a solution to the balanced current distribution problem. βi1 are the control variables to obtain a feasible solution of current distribution.
To illustrate the application of the APSO algorithm in tracking the optimized current distribution, first a solution vector of xi with m particles and n dimension is determined as follows:
In this APSO algorithm, the solution vectors, which are also called particles, are scattered through the multi-dimensional search space. Generally speaking, the current distribution problem can be formulated as (17) or (18).
In multi-dimensional search space, during the (t + 1)th transfer, the ith coordinate component of the transfer vector of the tth particle is manipulated according to the following equations:
where, i= 1, …, m, and m is the size of the swarm; d = 1, …, n, and n is the size of the space of a given problem. Constant output voltage is the constriction factor. c1 and c2 are positive constants used to control the impact of the local and global component. pis is the best experience in each generation, and the pgs is the best particle in the swarm. r1s and r2s are random attenuation factors. vis(t) and xis(t) are the velocity and position of the ith particle in the dth dimension at tth generation. r1s and r2s are both the random numbers between 0 and 1.
The MTMRWPT system is constraint by the constant output voltage according to (4) and basic system constraints according to (23).
In n-transmitter n-receiver WPT system, there are 2n dimensions to the solution with βi1 and βi2 (i = 1, 2, …, n). The system should provide balanced current distribution and meanwhile provide constant output voltage. For βi2 are controlled to a set system manipulating in high-efficiency condition based on (14), the control dimensions are reduced to n dimensions. The output voltage is constraint by the equality constraint condition (4), the exact solution of current distribution is reduced to (n − 1) dimensions.
4. Results
To verify the validity of the proposed MTMRWPT system, the mathematical model is calculated and simulated using MATLAB and MATLAB/Simulink platform. An experimental prototype was implemented as shown in Figure 3. Table 1 presents parameters of a two-transmitter two-receiver WPT system.
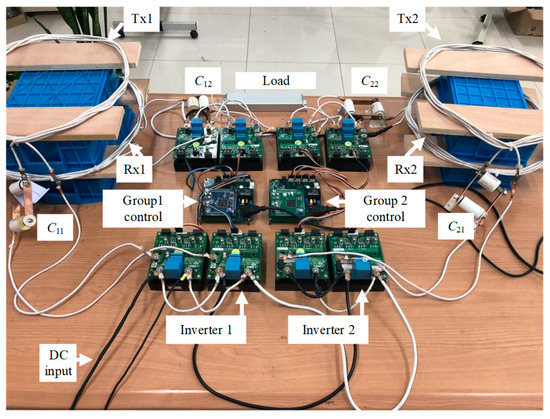
Figure 3.
Experiment platform of the two-transmitter two-receiver WPT system.

Table 1.
Key parameters of the two-transmitter two-receiver WPT system.
In Figure 3, Tx1 and Tx2 denote the transmitter coils, Rx1 and Rx2 denote the receiver coils. C11 and C21 denote the compensation capacitances at the primary side, C21 and C22 denote the compensation capacitances at the secondary side. The active-bridge at each coil consist of two half-bridge circuit modules KIT8020CRD8FF1217P-1. The MOSFET used in half-bridge circuit modules is SCT3030KL, the turn on resistance of which is only 30 mΩ, approximately. Group 1 and group 2 are respectively controlled by a controller consist of a digital signal processor (DSP) TMS320F28335.
Firstly, we compare output voltage and current distribution in different βi1. In this two-transmitter two-receiver WPT system, Ro is set as 2 Ω, β21 sweeps from 25° to 75° and β11 is manipulated according to the constant output voltage condition (4) to provide constant output voltage. β12 and β22 are set according to (14) to assure system operate at high-efficiency condition. Figure 4 shows the experiment waveform of the transmitters and receivers.
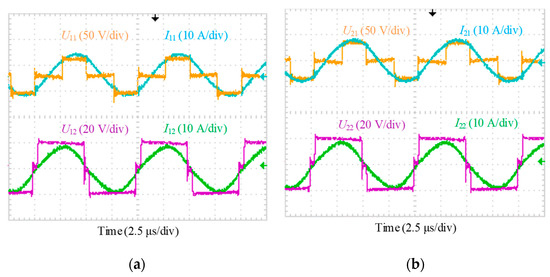
Figure 4.
Experimental waveform: (a) 1st group coil; (b) 2nd group coils.
According to the Section 3.3, the ICD control strategy can provide control output voltage Uo and current distribution simultaneously. In Figure 5a, the output voltage is controlled by β11 and β21 based on (4) and remains unchanged in general. It indicates that by controlling β11 and β21, the ICD control strategy can control output voltage Uo. Figure 5b illustrates under the ICD control strategy in the two-transmitter two-receiver WPT system, when the β21 changes and β11 is set according to (4), the voltages U11 and U21 of active bridges in transmitter changes rapidly between 15 V and 27 V, and the variation range of the voltages U12 and U22 of active bridges in receivers is smaller between 17.5 V and 20 V compared to the voltages in transmitters. Figure 5c illustrates under the ICD control strategy in two-transmitter two-receiver WPT system, when the β21 changes and β11 is set according to (4), the currents I12 and I22 of active bridges in receivers changes rapidly between 3 A and 8 A, and the variation range of the currents I11 and I21 of active bridges in transmitters is smaller between 5.5 A and 6 A compared to the currents at receivers. For the ICD control strategy, as analyzed in Section 3.2 (c) and (d), the currents Ii1 at the transmitter coils remain unchanged generally despite the variation of βi1, and the currents Ii2 at the receiver coils change rapidly due to the variation of βi1. Therefore, the current distribution in the receivers has to be balanced while the current distribution in transmitter remained unchanged despite the variation of βi1. The constraint condition (17) is then reduced to (18), which will reduce the complexity of system control.
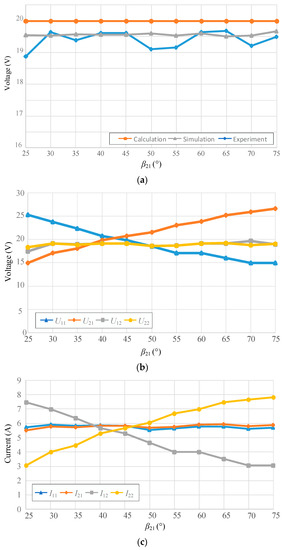
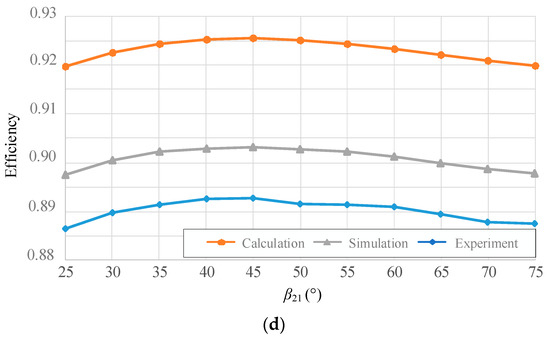
Figure 5.
Experimental results: (a) output voltage; (b) voltages of active bridges at different β21; (c) currents of active bridges at different β21; (d) efficiencies comparison for calculation, simulation and experiments.
Figure 5d illustrates efficiencies in two-transmitter two-receiver WPT system. In Figure 5d the efficiency reaches maximum efficiency of 89.2% in general, which indicates that by controlling β12 and β22, efficiencies of system is well optimized, the ICD control strategy provides a solution for MTMRWPT systems to provide constant output voltage, balance the current distribution and support high-efficiency power transfer.
Secondly, this study compares the efficiency of the MTMRWPT system with a STSRWPT system. A STSRWPT system can provide higher efficiency than MTMRWPT system because of fewer components and smaller power loss, However, the coils suffer from higher current and voltage stress and restrict the power level of the WPT system. To compare the efficiency of these two systems, the load resistance of s STSRWPT system is set at 4 Ω, while the load resistance of MTMRWPT system is set at 2 Ω. This ensures the optimal βi2 of two systems equal 85° and avoids the influence of conduction loss of inverters in receiver coils. The two systems transfer 200 W output power respectively and the input voltage of two systems is set the same value of 30 V. The coils of STSRWPT is composed of coil Tx1 and Rx1.
In experiment, the two systems provide 200 W power respectively, and the maximum efficiency of STSRWPT system is 89.8% which is a little higher than the 89.2% in the MTMRWPT system. The currents in the STSRWPT system are I11 = 7.83 A, I12 = 7.34 A, while the current in MTMRWPT are I11 = 5.84 A, I12 = 5.85 A, I21 = 5.68 A, I22 = 5.29 A when β11 = 40°and β21 = 45°. This means that the MTMRWPT system reduces the current stress in the WPT system; the voltages in the STSRWPT system are U11 = 25.05 V, U12 = 25.61 V, while the voltages in the MTMRWPT are U11 = 19.83 V, U12 = 20.68 V, U21 = 19.10 V, U22 = 19.10 V. It can be inferred that the MTMRWPT system reduces the voltage stress in WPT system and it is valuable in high-power transfer system to balance the current distribution and control the output voltage.
Thirdly, discussing the influence of β11 and β21 to system efficiency and equivalent resistances of receiver coils in two-transmitter two-receiver WPT system. Figure 6 is the calculation results based on the system parameters in Table 1. β12 and β22 are set based on ICD control strategy on (14), β11 and β21 are swept from 0° to 90° to achieve the efficiencies and input resistances and equivalent resistances of system. Figure 6a,b show the input resistances Rini at the transmitters vs. β11 and β21. Figure 6c,d show that the resistances Rri at the receiver coils vs. β11 and β21. Figure 6e shows the efficiency vs. β11 and β21.
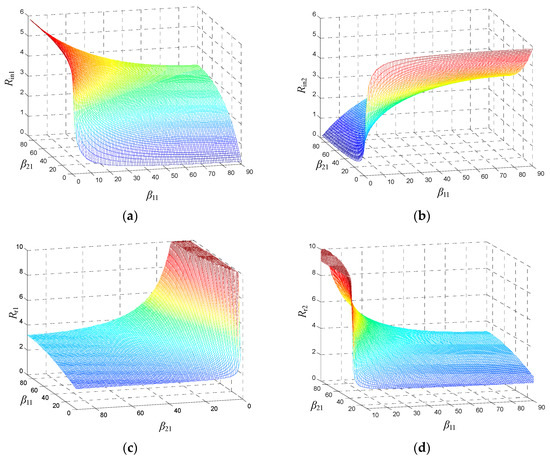
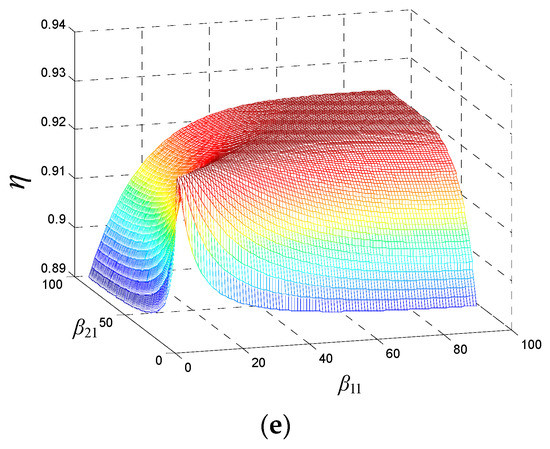
Figure 6.
Simulation results of MTMRWPT system: (a) input resistance of 1st group; (b) input resistance of 2nd group; (c) equivalent resistances of resistance matching segments at 1st group coil; (d) equivalent resistances of resistance matching segments; (e) efficiency of MTMRWPT system.
Figure 6c,d reveals that the resistances Rri at the receiver coils vary more rapidly than input resistances Rini at the transmitter coils in Figure 6a,b. In Figure 6a,b, the input resistances Rin1 vary between 0.937 Ω and 5.099 Ω and Rin2 vary between 0.938 Ω and 5.099 Ω when the β11 and β21 vary from 10° to 90°. In Figure 6c,d, the resistances Rr1 vary between 1.855 Ω and 11.988 Ω and Rr2 varies between 1.850 Ω and 11.884 Ω when the β11 and β21 vary from 10° to 90°; it means the currents at the receiver coils vary more rapidly than the ones at the transmitter coils. β12 and β22 are set β12, BEST and β22, BEST at the receiver side, the reflected resistances of two receiver coils are similar and the currents at the transmitter coils are balanced, the fitness function in (17) can be simplified to (18).
In the Figure 6c,d, the equivalent resistances Rri vary when β11 and β21 vary. it has the advantage that the equivalent resistances Reqi is under control and can manipulate the equivalent resistances Reqi of receivers to match system requirement. The resistances Rri at the receiver coils vary more rapidly than input resistances Rini at the transmitter coils. However, there is a wide-range stationary interval where Rri vary slowly when β11 and β21 vary. The equivalent resistance Rr1 varies between 2.823 Ω and 3.726 Ω, and Rr2 varies between 2.815 Ω and 3.712 Ω when the β11 and β21 vary from 60° to 90°. Furthermore, when β11 and β21 get close to the optimal β11 and β21 at which the system achieves optimal efficiency, the efficiency changes slowly. As shown Figure 6e, when the β11 and β21 change between 60° to 90° and the efficiency changes between 92.52% and 92.56%. This means that the ICD control strategy has a wide control range of β11 and β21 at which system can provide high efficiency.
In Figure 6c when β11 is small the equivalent resistance Rr2 increases rapidly. This is because when β11 is small the output voltage Uo becomes the low base on (4), but the current I22 remain unchanged based on (16). In the same way, Figure 6d reveals that when β21 is small the resistance Rr1 increases rapidly. This indicates that the β11 and β21 should not be small to avoid rapid variation of resistances Rri. The equivalent resistances at the receiver coils is with wider control range and it is easier for the receiver coils to be manipulated to the resistance-matching condition (13).
Fourthly, to verify the feasibility of ICD control strategy, this study compares the ICD control strategy with best resistance matching control strategies at a three-transmitter three-receiver WPT system. The simulations compare their current distribution based on the calculation method, the APSO method with fitness function f1 and the APSO method with fitness function f2. The ICD control strategy is based on (14) to derive the solution of βi2, while the best resistance matching control strategy is based on (12) to derive the numerical solution of βi2. The calculation method set β11 = β21 = β31 to derive the numerical solutions of β11, β21, β31, while APSO method achieves the solutions of β11, β21, β31 with different fitness functions f1 and f2. The parameters of the system are presented in Table 2.
Table 2.
Key parameters of the three-transmitter three-receiver WPT system.
The line trace in Figure 7 shows the efficiencies solutions based on best resistance matching control strategy and the solutions based on the ICD control strategy, and the histograms show the current distribution. In Figure 7, the efficiencies of best resistance matching control strategy, which are 92.788%, 92.792%, and 92.790%, respectively, are higher than the efficiencies based on the ICD control strategy which are 92.804%, 92.860%, and 92.858%, respectively. However, the current distribution is not well balanced in the best resistance-matching control strategy. This is because the input resistances are unbalanced in the best resistance-matching control strategy. Focusing on solutions based on the ICD control strategy, the current distribution is decently balanced and the efficiency is still high enough to satisfy system demands. Figure 7 shows that the efficiency based on the APSO method with fitness function f1 and f2 are higher than the efficiency based on the calculation method. This is because the calculation method is based on the conditions that satisfy β11 = β21 = β31 while the β11, β21 and β31 in APSO method are optimized for balanced current distribution.
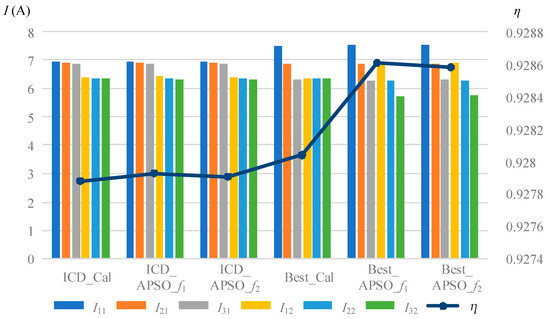
Figure 7.
Simulation results of current distribution and efficiency in three-transmitter three-receiver WPT system. ‘ICD’ represents the improved current distribution (ICD) control strategy, ‘Best’ represents the best resistance matching method, ‘Cal’ represents the model based on the calculation method to get the βi1.
Figure 8 shows the generation simulation results of three-transmitter three-receiver WPT system based on APSO with different fitness functions. The parameters of three-transmitter three-receiver WPT system are listed in Table 2. Figure 8a shows the simulation results of APSO with fitness function f1 and Figure 8b shows the simulation results of APSO with fitness function f2. The output probability versus generations based on APSO is calculated on account of (17-18). As shown in Figure 8, it is found that both the output probability based on fitness function f1 and f2 decreases quickly and good convergences are achieved within 15 generations. It also reveals that the current distribution in both the APSO based on the ICD control strategy with both fitness function f1 and f2 are balanced in Figure 7. This means the fitness function f2 can replace the fitness function f1 in practical applications to reduce the control complexity of balancing current distribution.
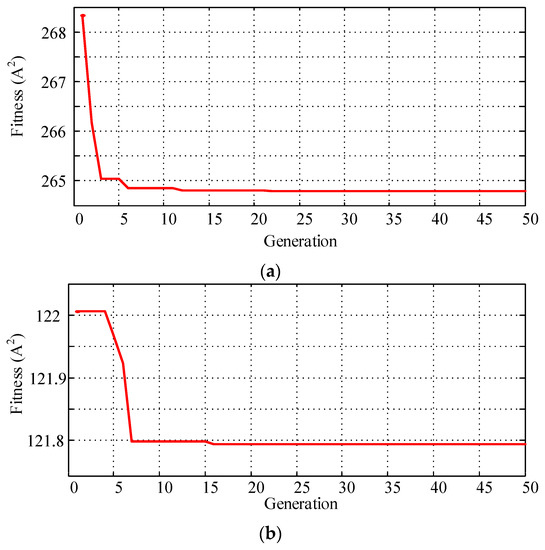
Figure 8.
Tracking fitness versus generations by two different fitness: (a) asynchronous particle swarm optimization (APSO) with fitness f1; (b) APSO with fitness f2.
5. Conclusions
In this article, an ICD control strategy for the MTMRWPT system has been developed to provide high system efficiency, constant output voltage, and balanced current distribution. Firstly, a detailed mathematical model has been derived and analyzed, and a two-transmitter two-receiver WPT system has been implemented to verify the practicability of the ICD control strategy. Secondly, a STSRWPT system and two-transmitter two-receiver WPT system have been compared through experimental results to verify that the proposed system can reduce the voltage and current stresses with small power loss, which improves system power capacity. Thirdly, a three-transmitter three-receiver WPT system has been further simulated to prove that the ICD control strategy can applied to MTMRWPT system. And an APSO methods with different fitness functions has been simulated to verify that the ICD strategy has the advantage that the currents at the transmitter coils are balanced and it reduces the control complexity simultaneously. Lastly, it has achieved an 89.2% efficiency, 20 V target output voltage, 200 W output power and balanced current distribution at 100 kHz in a two-transmitter two-receiver WPT system.
Author Contributions
W.C. proposed the main idea, designed and performed the experiments, and wrote the manuscript. K.H. and J.X. double-checked and discussed the results and the whole manuscript. X.L., D.M. and H.T. contributed to the discussion of this study. All authors have approved the final version of this manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bosshard, R.; Kolar, J.W. Multi-Objective Optimization of 50 kW/85 kHz IPT System for Public Transport. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1370–1382. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.-T.; Mi, C. Modern Advances in Wireless Power Transfer Systems for Roadway Powered Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Lechner, E.H.; Shladover, S.E. Roadway Powered Electric Vehicle: An All-Electric Hybrid System. In Proceedings of the International Electric Vehicle Symposium, Washington, DC, USA, 20 October 1986. [Google Scholar]
- Wu, H.H.; Masquelier, M.P. An overview of a 50kW inductive charging system for electric buses. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015; pp. 1–4. [Google Scholar]
- Huh, J.; Lee, S.W.; Lee, W.Y.; Cho, G.H.; Rim, C.T. Narrow-Width Inductive Power Transfer System for Online Electrical Vehicles. IEEE Trans. Power Electron. 2011, 26, 3666–3679. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.-S.; Lee, J.-H.; Lee, S.-H.; Park, C.-B.; Jung, S.-M.; Lee, S.-G.; Yi, K.-P.; Baek, J. Development of 1-MW Inductive Power Transfer System for a High-Speed Train. IEEE Trans. Ind. Electron. 2015, 62, 6242–6250. [Google Scholar] [CrossRef]
- Elliott, G.; Covic, G.; Kacprzak, D.; Boys, J. A New Concept: Asymmetrical Pick-Ups for Inductively Coupled Power Transfer Monorail Systems. IEEE Trans. Magn. 2006, 42, 3389–3391. [Google Scholar] [CrossRef]
- Ko, Y.D.; Jang, Y.J. The Optimal System Design of the Online Electric Vehicle Utilizing Wireless Power Transmission Technology. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1255–1265. [Google Scholar] [CrossRef]
- Ahn, S.; Pak, J.; Song, T.; Lee, H.; Byun, J.-G.; Kang, D.; Choi, C.-S.; Kim, E.; Ryu, J.; Kim, M.; et al. Low frequency electromagnetic field reduction techniques for the On-Line Electric Vehicle (OLEV). In Proceedings of the 2010 IEEE International Symposium on Electromagnetic Compatibility, Fort Lauderdale, FL, USA, 25–30 July 2010; pp. 625–630. [Google Scholar]
- Seungyoung, A.; Joungho, K. Magnetic field design for high efficient and low EMF wireless power transfer in on-line electric vehicle. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 3979–3982. [Google Scholar]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Trends of Wireless Power Transfer Systems for Roadway Powered Electric Vehicles. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–5. [Google Scholar]
- Choi, S.-Y.; Jeong, S.Y.; Lee, E.S.; Gu, B.W.; Lee, S.-W.; Rim, C.T. Generalized Models on Self-decoupled Dual Pick-up Coils for Large Lateral Tolerance. IEEE Trans. Power Electron. 2015, 30, 1. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Z.; Dai, H. A Critical Review of Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Energies 2014, 7, 4316–4341. [Google Scholar] [CrossRef]
- Houran, M.A.; Yang, X.; Chen, W. Magnetically Coupled Resonance WPT: Review of Compensation Topologies, Resonator Structures with Misalignment, and EMI Diagnostics. Electronics 2018, 7, 296. [Google Scholar] [CrossRef]
- Chen, L.; Liu, S.; Zhou, Y.C.; Cui, T.J. An Optimizable Circuit Structure for High-Efficiency Wireless Power Transfer. IEEE Trans. Ind. Electron. 2013, 60, 339–349. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W.; Mühlethaler, J.; Stevanović, I.; Wunsch, B.; Canales, F. Modeling and η-α-Pareto Optimization of Inductive Power Transfer Coils for Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 50–64. [Google Scholar] [CrossRef]
- Ahn, D.; Hong, S. A Study on Magnetic Field Repeater in Wireless Power Transfer. IEEE Trans. Ind. Electron. 2013, 60, 360–371. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, V.B.; Choi, W. Design of a High-Efficiency Wireless Power Transfer System with Intermediate Coils for the On-Board Chargers of Electric Vehicles. IEEE Trans. Power Electron. 2018, 33, 175–187. [Google Scholar] [CrossRef]
- Deng, J.; Li, W.; Li, S.; Mi, C. Magnetic integration of LCC compensated resonant converter for inductive power transfer applications. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 660–667. [Google Scholar]
- Shijo, T.; Ogawa, K.; Obayashi, S. Optimization of thickness and shape of core block in resonator for 7 kW-class wireless power transfer system for PHEV/EV charging. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3099–3102. [Google Scholar]
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C.; Mi, C. Loosely Coupled Transformer Structure and Interoperability Study for EV Wireless Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačic, M. Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Beh, T.C.; Kato, M.; Imura, T.; Oh, S.; Hori, Y. Automated Impedance Matching System for Robust Wireless Power Transfer via Magnetic Resonance Coupling. IEEE Trans. Ind. Electron. 2013, 60, 3689–3698. [Google Scholar] [CrossRef]
- Imura, T.; Hori, Y. Optimization using transmitting circuit of multiple receiving antennas for wireless power transfer via magnetic resonance coupling. In Proceedings of the 2011 IEEE 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011; pp. 1–4. [Google Scholar]
- Almohaimeed, A.M.; Amaya, R.E.; Lima, J.A.; Yagoub, M.C.E. An Adaptive Power Harvester with Active Load Modulation for Highly Efficient Short/Long Range RF WPT Applications. Electronics 2018, 7, 125. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.; Lin, T.; Liu, Y.; Li, Y.; He, Z.; Yu, J. Design and implementation of a novel WPT system for railway applications. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 213–216. [Google Scholar]
- Zhang, T.; Fu, M.; Ma, C.; Zhu, X. Optimal load analysis for a two-receiver wireless power transfer system. In Proceedings of the 2014 IEEE Wireless Power Transfer Conference, Jeju, Korea, 8–9 May 2014; pp. 84–87. [Google Scholar]
- Fu, M.; Yin, H.; Zhu, X.; Ma, C. Analysis and Tracking of Optimal Load in Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 3952–3963. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A Maximum Efficiency Point Tracking Control Scheme for Wireless Power Transfer Systems Using Magnetic Resonant Coupling. IEEE Trans. Power Electron. 2015, 30, 3998–4008. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.; Liu, Y.; He, Z. Efficiency optimising strategy for dual-coupled transmitters based WPT systems. Electron. Lett. 2016, 52, 1877–1879. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Jin, N.; Tang, H. Analysis and Design of a Wireless Power Transfer System with Dual Active Bridges. Energies 2017, 10, 1588. [Google Scholar] [CrossRef]
- Rajagopal, S.; Khan, F. Multiple Receiver Support for Magnetic Resonance Based Wireless Charging. In Proceedings of the 2011 IEEE International Conference on Communications Workshops (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–5. [Google Scholar]
- Cannon, B.L.; Hoburg, J.F.; Stancil, D.D.; Goldstein, S.C. Magnetic Resonant Coupling as a Potential Means for Wireless Power Transfer to Multiple Small Receivers. IEEE Trans. Power Electron. 2009, 24, 1819–1825. [Google Scholar] [CrossRef]
- Lee, S.; Kim, S.; Seo, C. Design of multiple receiver for wireless power transfer using metamaterial. In Proceedings of the 2013 Asia-Pacific Microwave Conference Proceedings (APMC), Seoul, Korea, 5–8 November 2013; pp. 1036–1038. [Google Scholar]
- Cai, W.; Ma, D.; Tang, H.; Lai, X.; Liu, X.; Sun, L. Highly Efficient Target Power Control for Two-Receiver Wireless Power Transfer Systems. Energies 2018, 11, 2726. [Google Scholar] [CrossRef]
- Sun, L.; Tang, H.; Zhong, S. Load-Independent Output Voltage Analysis of Multiple-Receiver Wireless Power Transfer System. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1238–1241. [Google Scholar] [CrossRef]
- Ahn, D.; Hong, S. Effect of Coupling Between Multiple Transmitters or Multiple Receivers on Wireless Power Transfer. IEEE Trans. Ind. Electron. 2013, 60, 2602–2613. [Google Scholar] [CrossRef]
- Madawala, U.; Thrimawithana, D. Modular-based inductive power transfer system for high-power applications. IET Power Electron. 2012, 5, 1119–1126. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.; Lin, T.; Sun, H.; He, Z. A Novel WPT System Based on Dual Transmitters and Dual Receivers for High Power Applications: Analysis, Design and Implementation. Energies 2017, 10, 174. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)–Based MPPT for PV With Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).