A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels

 , and
, and 
Abstract
:1. Introduction
2. Background
2.1. Analysis of sEMG Signals
- MAV: It is the average of the N absolute values of the sEMG samples within a given time epoch, and is given by:
- ZC: It is the number of times that the signal samples cross zero, whether it goes from a negative value to a positive one or the other way around, as in equation:where
- WL: It is the accumulated variation of a signal that can indicate the degree of signal oscillation and is given by equation:
- SSC: It counts the number of times that the slope of the signal changes sign, which make necessary to evaluate where it is, where it was and where the signal goes. SSC is calculated with equation:where
2.2. Principal Component Analysis
2.3. Support Vector Machines
3. Methods and Experimentation
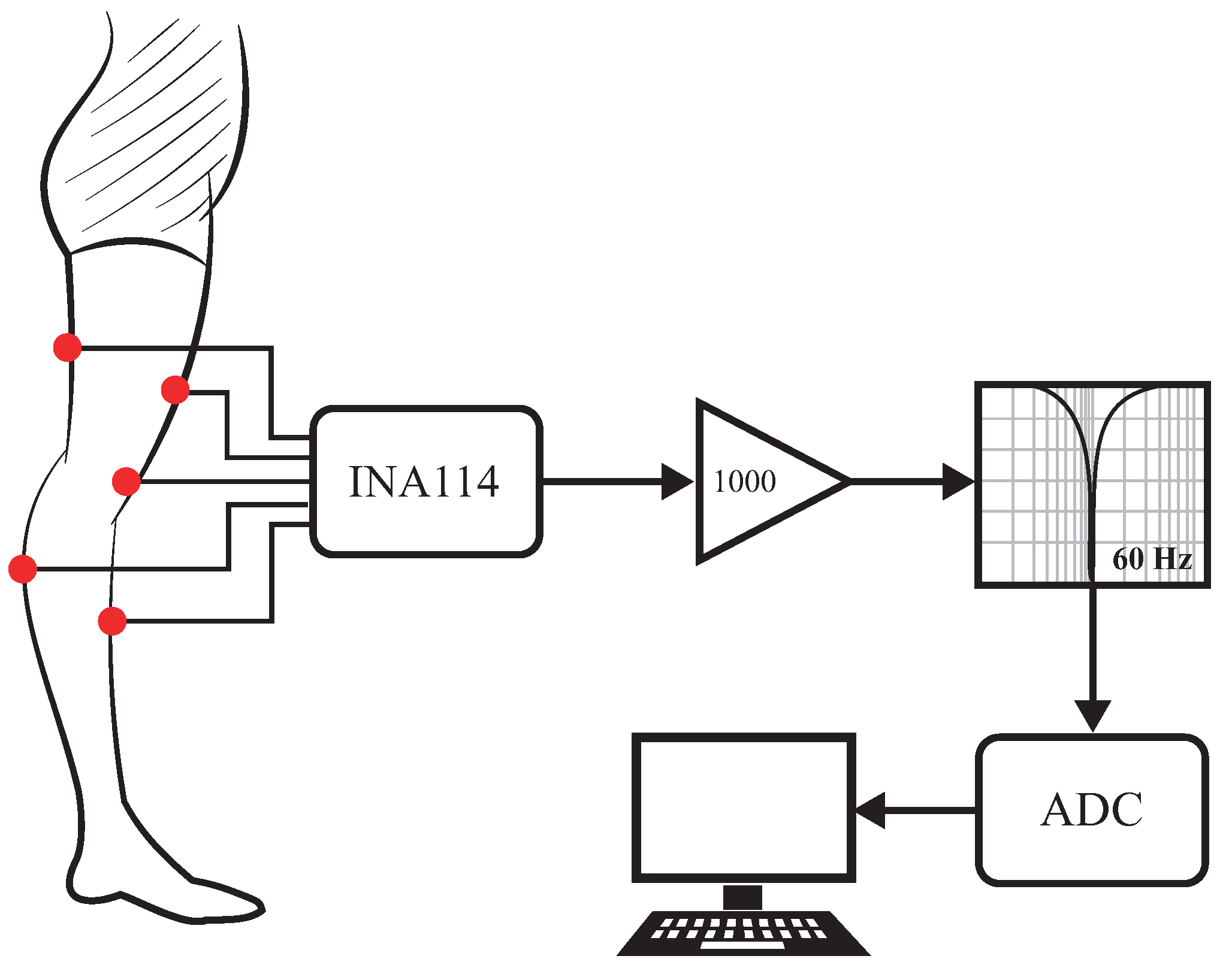
3.1. Data Acquisition
3.2. Data Processing
3.3. Experimentation
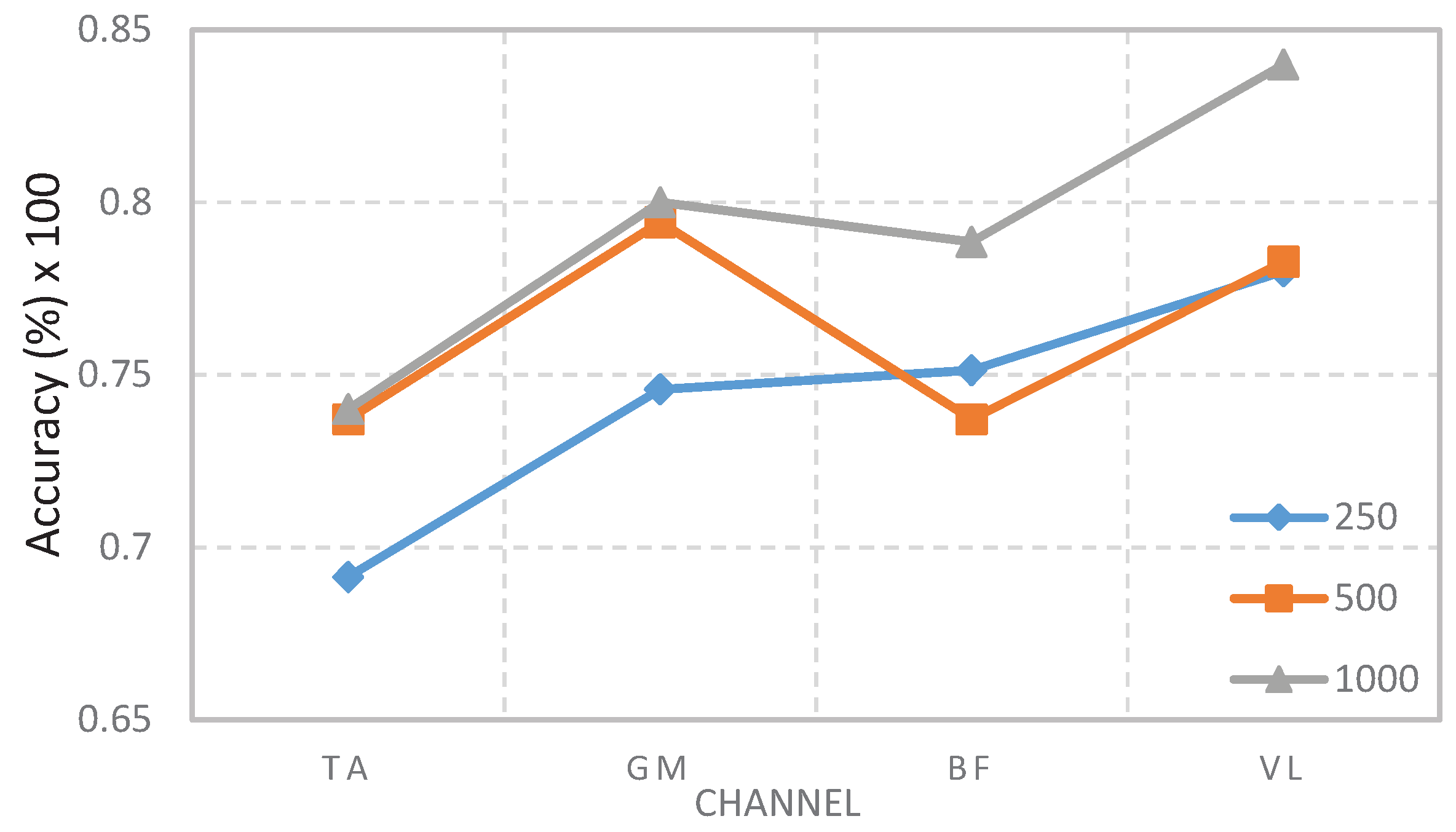
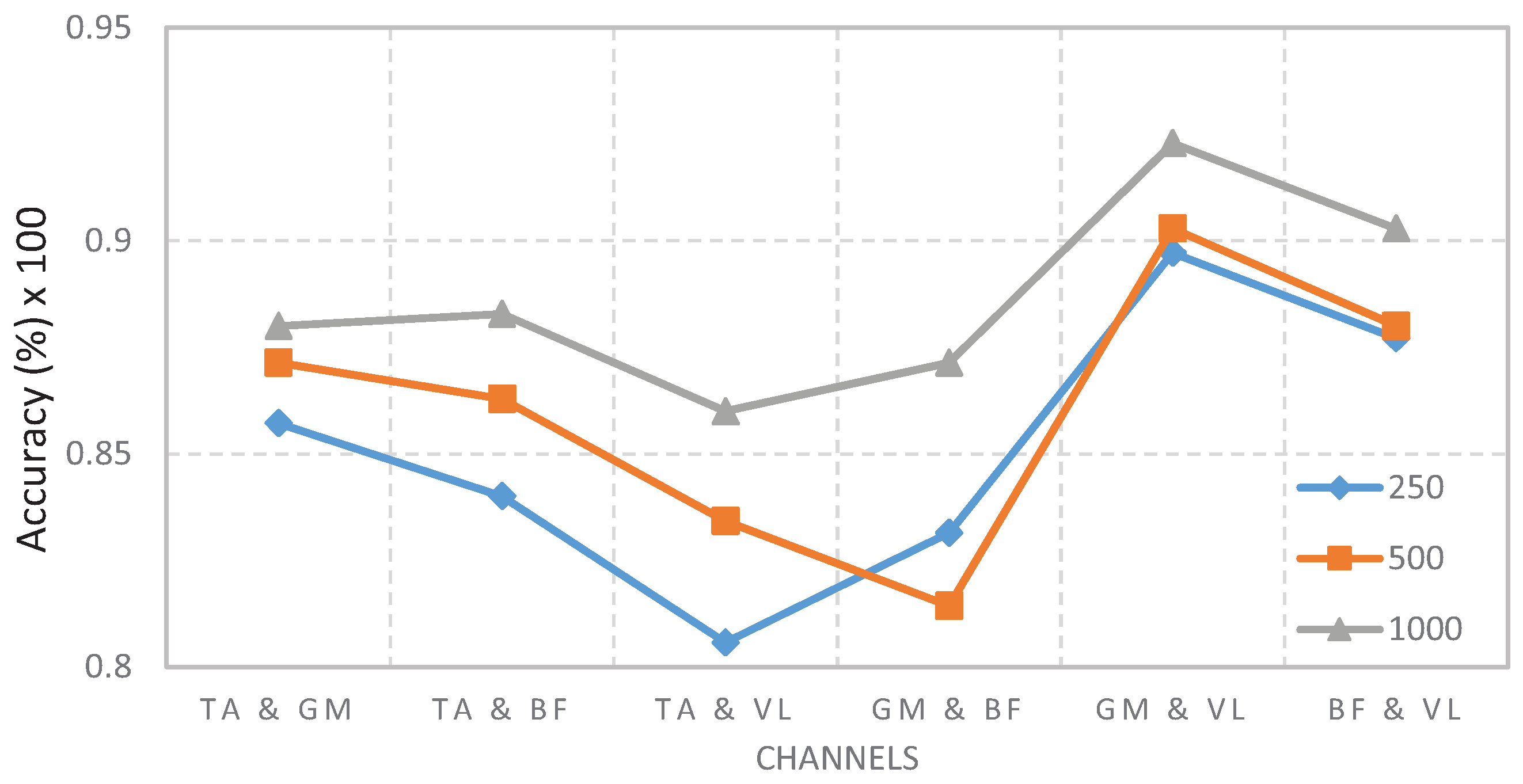
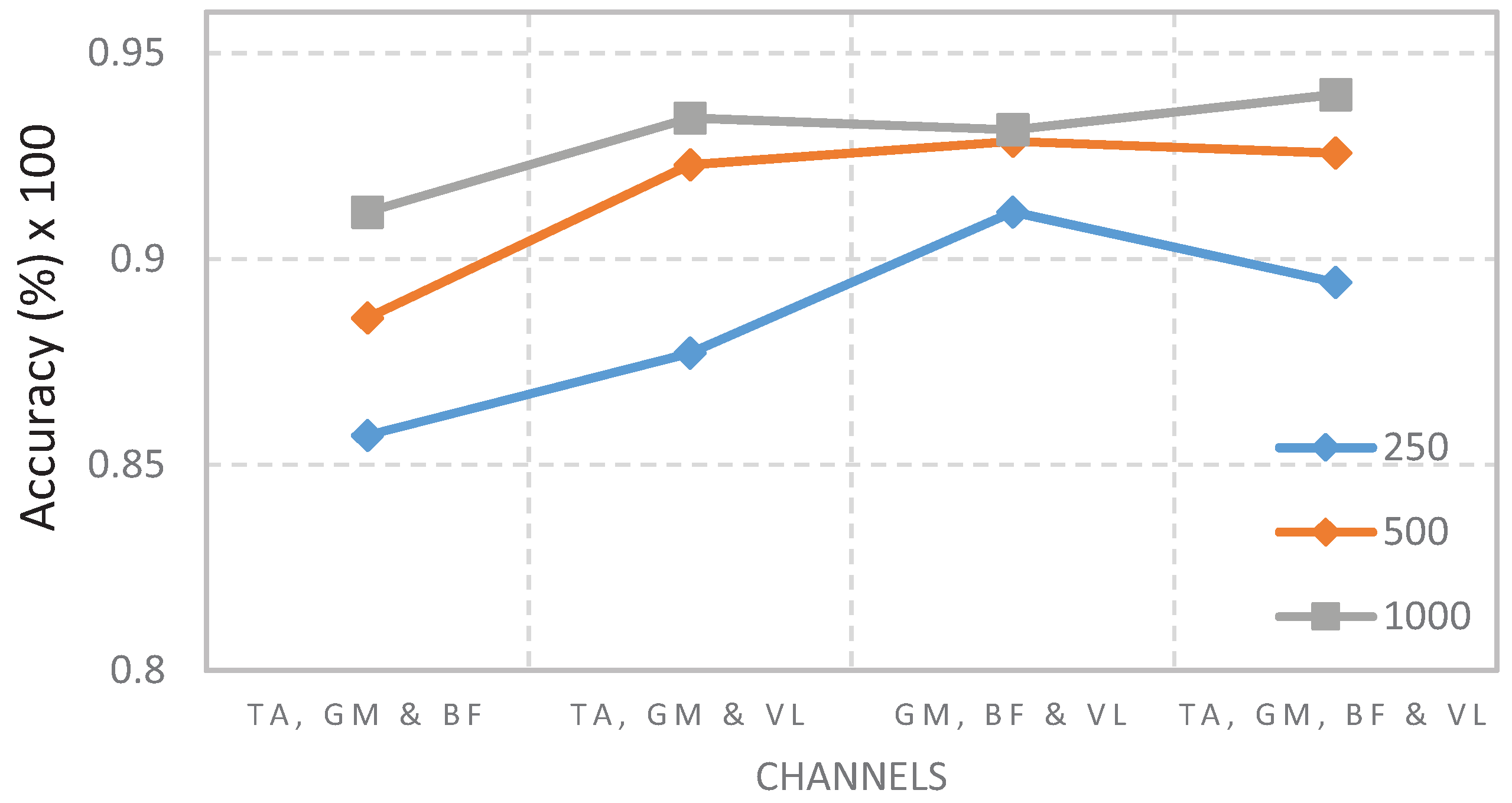
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| EMG | Electromyography |
| MAV | Mean Absolute Value |
| ZC | Zero Crossings |
| WL | Waveform Length |
| SSC | Slope Sign Changes |
| SVM | Support Vector Machine |
| PCA | Principal Component Analysis |
| TA | Tibialis Anterioris |
| GM | Gastroctemius Medials |
| BF | Biceps Femoris |
| VL | Vastus Lateralis |
| QP | Quadratic Programming |
| ADC | Analog Digital Converter |
| LP | Lift the toe |
| LT | Lift the heel |
| PD | Toe to the right |
| PI | Toe to the left |
| AT | Recharge on the heel |
| AP | Recharge on the toe |
| RR | Rest of the foot |
| ROC | Receiver Operating Characteristic |
| ANOVA | ANalysis Of VAriance |
References
- Oskoei, M.A.; Hu, H. Support Vector Machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef] [PubMed]
- She, Q.; Luo, Z.; Meng, M.; Xu, P. Multiple kernel learning SVM-based EMG pattern classification for lower limb control. In Proceedings of the 11th International Conference on Control Automation Robotics Vision (ICARCV), Singapore, 7–10 December 2010; pp. 2109–2113. [Google Scholar]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Raj, S.; Ray, K.C. ECG Signal Analysis Using DCT-Based DOST and PSO Optimized SVM. IEEE Trans. Instrum. Meas. 2017, 66, 470–478. [Google Scholar] [CrossRef]
- Sukawattanavijit, C.; Chen, J.; Zhang, H. GA-SVM Algorithm for Improving Land-Cover Classification Using SAR and Optical Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 284–288. [Google Scholar] [CrossRef]
- AlOmari, F.; Liu, G. Novel hybrid soft computing pattern recognition system SVM-GAPSO for classification of eight different hand motions. Optik 2015, 126, 4757–4762. [Google Scholar] [CrossRef]
- Meng, M.; Luo, Z.; She, Q.; Ma, Y. Automatic recognition of gait mode from EMG signals of lower limb. In Proceedings of the 2nd International Conference on Industrial Mechatronics and Automation, Wuhan, China, 30–31 May 2010; pp. 282–285. [Google Scholar]
- Chan, A.D.C.; Englehart, K.B. Continuous myoelectric control for powered prostheses using hidden Markov models. IEEE Trans. Biomed. Eng. 2005, 52, 121–124. [Google Scholar] [CrossRef] [PubMed]
- Fukuda, O.; Tsuji, T.; Kaneko, M.; Otsuka, A. A human-assisting manipulator teleoperated by EMG signals and arm motions. IEEE Trans. Robot. Automat. 2003, 19, 210–222. [Google Scholar] [CrossRef]
- Vuskovoc, M.; Du, S. Classification of prehensile EMG patterns with simplified fuzzy ARTMAP networks. In Proceedings of the 2002 International Joint Conference on Neural Networks (IJCNN’02), Honolulu, HI, USA, 12–17 May 2002; pp. 2539–2544. [Google Scholar]
- Englehart, K.B.; Hudgin, B.; Parker, P.A. A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2001, 48, 302–311. [Google Scholar] [CrossRef] [PubMed]
- Park, S.H.; Lee, S.P. EMG pattern recognition based on artificial intelligence techniques. IEEE Trans. Rehabil. Eng. 1998, 6, 400–405. [Google Scholar] [CrossRef] [PubMed]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Purushothaman, G.; Vikas, R. Identification of a feature selection based pattern recognition scheme for finger movement recognition from multichannel EMG signals. Australas Phys. Eng. Sci. Med. 2018, 41, 549–559. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Zhou, L.; Li, W.; Liu, Y.; Wang, J.; He, P. Protective effects of ginsenosides Rg1 and Rb1 on an Alzheimer’s disease mouse model: A metabolomics study. J. Chromatogr. B Anal. Technol. Biomed. Life Sci. 2015, 985, 54–61. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.D.; Beazer, M.S.; Hahn, M.E. Myoelectric Walking Mode Classification for Transtibial Amputees. IEEE Trans. Biomed. Eng. 2013, 60, 2745–2750. [Google Scholar] [CrossRef] [PubMed]
- Lucas, M.F.; Gaufriau, A.; Pascual, S.; Doncarli, C.; Farina, D. Multi-channel surface EMG classification using support vector machines and signal-based wavelet optimization. Biomed. Signal Process. Control 2008, 3, 169–174. [Google Scholar] [CrossRef]
- Ceseracciu, E.; Reggiani, M.; Sawacha, Z.; Sartori, M.; Spolaor, F.; Cobelli, C.; Pagello, E. SVM classification of locomotion modes using surface electromyography for applications in rehabilitation robotics. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 165–170. [Google Scholar]
- Alizadeh, J.; Vahid, A.; Bahrami, F. Recognizing subjects who are learned how to write with foot from unlearned subjects using EMG signals. In Proceedings of the 23rd Iranian Conference on Biomedical Engineering and 2016 1st International Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 23–25 November 2016; pp. 331–335. [Google Scholar]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Pancholi, S.; Joshi, A.M. Portable EMG Data Acquisition Module for Upper Limb Prosthesis Application. IEEE Sens. J. 2018, 18, 3436–3443. [Google Scholar] [CrossRef]
- Oskoei, M.A.; Hu, H. GA-based Feature Subset Selection for Myoelectric Classification. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO 2006), Kunming, China, 17–20 December 2006; pp. 1465–1470. [Google Scholar]
- Al-Ani, A.; Koprinska, I.; Naik, G.; Khushaba, R.N. A dynamic channel selection algorithm for the classification of EEG and EMG data. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 4076–4081. [Google Scholar]
- Al-Timemy, A.H.; Bugmann, G.; Outram, N.; Escudero, J. Single channel-based myoelectric control of hand movements with Empirical Mode Decomposition. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 6059–6062. [Google Scholar]
- Pulido-Rojas, C.; Solaque-Guzmán, L.; Velasco-Toledo, N. Weed recognition by SVM texture feature classification in outdoor vegetable crops images. Ing. Investig. 2017, 37, 68–74. [Google Scholar] [CrossRef]
- Yang, M.; Zheng, H.; Wang, H.; McClean, S. Feature selection and construction for the discrimination of neurodegenarative diseases based on gait analysis. In Proceedings of the 3rd International Conference on Pervasive Computing Technologies for Healthcare, London, UK, 1–3 April 2009; pp. 1–7. [Google Scholar]
- Jolliffe, I.T. Principal Component Analysis, 2nd ed.; Springer: Aberdeen, UK, 2002; pp. 21–26. [Google Scholar]
- Dunteman, G.H. Principal Components Analysis, 1st ed.; SAGE: Des Moines, IA, USA, 1989; pp. 15–46. [Google Scholar]
- Sacco, I.C.; Gomes, A.A.; Otuzi, M.E.; Pripas, D.; Onodera, A.N. A method for better positioning bipolar electrodes for lower limb EMG recordings during dynamic contractions. J. Neurosci. Methods 2009, 180, 133–137. [Google Scholar] [CrossRef] [PubMed]
- Pearson, F.R.S.K. LIII on lines and planes of closest fit to systems of points in space. Philos. Mag. Ser. 6 1901, 2, 559–572. [Google Scholar] [CrossRef]
- Hotelling, H. Analysis of a complex of statistical variables into principal components. J. Educ. Psychol. 1933, 24, 417–441. [Google Scholar] [CrossRef]
- Vapnik, V.; Corinna, C. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Pérez-Hernández, L.P.; Mora-Flórez, J.J.; Bedoya-Cebayos, J. A linear approach to determining an SVM-based fault locator’s optimal parameters. Ing. Investig. 2009, 29, 76–81. [Google Scholar]
- Afsharipour, B.; Soedirdjo, S.; Merletti, R. Two-dimensional surface EMG: The effects of electrode size, interelectrode distance and image truncation. Biomed. Signal Process. Control 2019, 49, 298–307. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Samples | Channels | ||
|---|---|---|---|---|
| 250 | 500 | 1000 | ||
| 1 | 90.00% | 91.43% | 95.71% | VL |
| 2 | 95.71% | 97.14% | 97.14% | GM & VL |
| 3 | 95.71% | 100.00% | 98.57% | TA, GM & VL |
| 4 | 95.71% | 100.00% | 100.00% | TA, GM, BF & VL |
| Number | Samples | Channels | ||
|---|---|---|---|---|
| 250 | 500 | 1000 | ||
| 1 | 52.86% | 55.71% | 64.29% | TA |
| 2 | 70.00% | 72.86% | 75.71% | TA & VL |
| 3 | 78.57% | 78.57% | 87.14% | TA, GM & BF |
| 4 | 81.43% | 81.43% | 87.14% | TA, GM, BF & VL |
| Step | Selection | ROC Area | ROC Area CI | C. E. | C. E. CI |
|---|---|---|---|---|---|
| 1 | Channel VL | 0.9397 | (0.8770, 1.00) | 0.1952 | (0.0224, 0.3680) |
| 2 | Channel GM & VL | 0.9517 | (0.8675, 1.00) | 0.1000 | (0.00, 0.2152) |
| 3 | Channel TA, GM & VL | 0.9673 | (0.9147, 1.00) | 0.0839 | (0.00, 0.1925) |
| 4 | All Channels | 0.9866 | (0.9426, 1.00) | 0.0506 | (0.00, 0.1604) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toledo-Pérez, D.C.; Martínez-Prado, M.A.; Gómez-Loenzo, R.A.; Paredes-García, W.J.; Rodríguez-Reséndiz, J. A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels. Electronics 2019, 8, 259. https://doi.org/10.3390/electronics8030259
Toledo-Pérez DC, Martínez-Prado MA, Gómez-Loenzo RA, Paredes-García WJ, Rodríguez-Reséndiz J. A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels. Electronics. 2019; 8(3):259. https://doi.org/10.3390/electronics8030259
Chicago/Turabian StyleToledo-Pérez, Diana C., Miguel A. Martínez-Prado, Roberto A. Gómez-Loenzo, Wilfrido J. Paredes-García, and Juvenal Rodríguez-Reséndiz. 2019. "A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels" Electronics 8, no. 3: 259. https://doi.org/10.3390/electronics8030259
APA StyleToledo-Pérez, D. C., Martínez-Prado, M. A., Gómez-Loenzo, R. A., Paredes-García, W. J., & Rodríguez-Reséndiz, J. (2019). A Study of Movement Classification of the Lower Limb Based on up to 4-EMG Channels. Electronics, 8(3), 259. https://doi.org/10.3390/electronics8030259