1. Introduction
This contribution serves as a friendly tribute to Richard Kerner, a distinguished figure in the realm of theoretical and mathematical physics, whose methodologies consistently embody a harmonious blend of precision, intuition, and a poetic touch. Kerner’s ability to reveal the concealed facets of diverse phenomena, in the domains of general relativity and gauge theory (Kaluza–Klein, e.g., [
1]), condensed matter (glasses, e.g., [
2]), particle physics (quarks and ternary algebras, e.g., [
3]), noncommutative geometric structures (e.g., [
4]), and many others, is an attestation of his profound insights.
In each of his works, Kerner consistently imparts that distinct touch of originality, elevating his contributions beyond the ordinary. His dedication to unraveling the intricacies of the universe is reflected not only in the rigor of his approach but also in the elegance with which he brings to light the hidden dimensions of our physical reality. One of his latest publications, as referenced in [
5], stands as a magisterial testament to his multifaceted talents.
This current contribution aligns seamlessly with the theme encapsulated in the title
The Languages of Physics of the special issue in honor of Kerner. My focus will be directed towards the mathematical language of physics, emphasizing the inherent limitation in precision when scrutinized from the perspective of a physicist. Such models are transient rather than eternal, subject to the passage of (entropic) time and contingent upon the scale at which they operate. To align with experimental observations and predictions, these models often undergo modifications, sometimes requiring radical transformations. In the dynamic interplay between the modeler and the modeled object, a degree of probability emerges, representing the level of epistemic confidence in the model’s appropriateness [
6].
This recognition of inherent uncertainty gives rise to the imperative of introducing some level of coarse-graining into the initial mathematical model, conceived to portray an ontic entity or fact. Take, for example, the inconceivability of irrational numbers in human perception, conceivability being here understood in terms of a measurable physical quantity. Yet physical laws, for several centuries now, have been articulated in terms of real numbers, denoted as , constructed from the abstract concept of limits (such as the limit of Cauchy sequences of rational numbers).
Nevertheless, these profoundly abstract mathematical concepts have evolved to such a degree of familiarity that they now stand as an indispensable foundation for formulating descriptions of our environment. Serving as a robust backdrop, they assist us in imposing structure and establishing a set of physical laws capable of navigating the intricacies of complexity and chaos. In our pursuit of order, we inevitably organize observations through the lens of symmetry.
Beneath the allure of this aesthetic concept lies the intricate framework of mathematics, particularly the concept of a group, with all its potential generalizations, deformations, approximations, and the inherent challenges of incompleteness and partial versions. It is within this mathematical tapestry that we find the tools and principles allowing us to not only conceptualize but also articulate the laws that govern the universe, providing a coherent and profound understanding of our complex reality.
In this contribution, which draws inspiration from a previous review [
7] and recent lectures held in both Poland and Brazil, serving as a significant element within the thematic framework of the special issue titled “The Languages of Physics”, we harness the potency of the concept of symmetry to reexamine the first elements of the sequence of unit spheres, denoted as
, and explore their profound physical implications across various domains of physics. This exploration extends into realms such as atomic, molecular, nuclear, particle, and condensed matter physics, shedding light on the intricate interplay between the mathematical abstraction of spheres and their tangible relevance in understanding the fundamental structures and behaviors that underpin the diverse facets of the physical world. In this regard, I cannot resist quoting the following excerpt from [
8], translated from French.
From there comes her fascination for pieces, lids, and other wheels whose circular movement she perpetuates, immersed in a hypnotic contemplation that extracts her from the world and disconnects her from a reality that is too aggressive.
We do not aspire to introduce entirely original content in this paper. Rather, it is conceived as a fusion of fundamental (somewhat very basic) and advanced discussions on the mathematics of symmetry. Rather than striving to introduce entirely novel content, this article is crafted as a synthesis, merging fundamental (yet foundational) discussions with advanced insights into the mathematics of symmetry.
The journey begins with a recapitulation of essential concepts pertaining to groups and semi-groups (
Section 2), followed by a freshman level reminder of algebraic and topological aspects of numbers (
Section 3). We then show the significant role played by simple or semisimple Lie groups in elucidating symmetries across classical and quantum physics realms (
Section 4).
The core of this presentation centers on a reexamination of the realm of spheres (
Section 5) and the ensuing exploration of the associated geometry of Hopf fibrations (
Section 6). Furthermore, we unravel the mesmerizing simplifications that the spherical symmetry contributes to explaining the Balmer lines, detailing the spectral line emissions of the hydrogen atom—a proto-quantum formalism dating back to 1885 (
Section 7). The paper concludes with a succinct summary in
Section 8.
For those seeking a more in-depth understanding,
Appendix A and
Appendix B provide additional details on group actions and the Lie algebra formalism.
2. Semi-Groups and Groups
In this section we recap main definitions concerning semi-groups, groups, and structures built from them. Usually these notions are supposed known but reviewing them lies in the self-contained spirit of this contribution.
2.1. Definitions
A semi-group is a set equipped with an operation that combines any two elements and to form a third element while being associative, i.e., .
A group is a semi-group having an identity element e, and inverse elements, .
A group or semi-group is Abelian if the operation is commutative: for all , e.g., translations in the line or to rotations on the circle or in the plane. Rotations in space are noncommutative.
Groups can be finite (e.g., permutations, point groups of symmetry of molecules), discrete (e.g., space group of symmetry of crystals), continuous (e.g., Euclidean displacements), Lie groups (infinitesimal transformations can be considered as well).
Continuous groups can be compact (parameters of transformation are bounded, e.g., rotations on the sphere) or non-compact, e.g., translations in the plane.
Two elements
and
of a group
G are said to be
conjugate if there exists
such that
. This is an equivalence relation whose equivalence classes are called
conjugacy classes (one famous example is the Rubik cube where the essential property for winning is precisely the set of conjugate classes of one permutation group, see
Figure 1 and [
9] for explanation).
2.2. Example: Chirality
Chirality is the simplest example of a group:
, with
,
.
P is like a mirror image. A figure is chiral if it cannot be mapped to its mirror image by rotations and translations alone. Examples are shown in
Figure 2 and
Figure 3.
A chiral object and its mirror image are said to be enantiomorphs.
An interesting question about mirrors is shown in
Figure 4: why does a mirror reverse left to right, but not top to bottom?
Beyond space parity (usually noted P), notable similar instances are observed in the realm of particle physics. These include charge conjugation (C), where the charge of a particle is reversed (), time reversal (T), involving the reversal of time (), and the dichotomy between matter and antimatter. Furthermore, the interplay of these individual symmetries gives rise to intriguing combinations such as , , and , adding depth and complexity to our understanding of fundamental physical principles.
2.3. Building Groups from Subgroups
A subset
H of a group
G is a
subgroup of
G if it contains
e and is stable versus group operations:
and
. The
direct product of two groups
and
consists in gluing the two groups together, without interaction:
is simply their Cartesian product, endowed with the group law:
The neutral element is . With the identifications , both and are invariant subgroups of (think of the plane as the product of two lines or of the torus as the product of two circles).
For the
semi-direct product of two groups
and
, one supposes one is given a homomorphism
from
into the group
of automorphisms of
. Then, one defines the semi-direct product
as the Cartesian product, endowed with the group law:
The neutral element is and the inverse of is (think of the affine group of the line, which combines dilation and translation).
2.4. Group Cosets
Let H be a subgroup of G. One says that mod H if there exists such that . Denoting the equivalence class of g mod H, the set of equivalence classes is denoted and called the left coset of G by H. The right coset is defined in a similar way as the set of equivalence classes .
2.5. Group Actions
Irreducibility linked to symmetry (and invariance) is the mathematical concept of a group, more precisely the group of transformations (see
Appendix A for more details). Concretely, elements in a group
G, like the group of Euclidean displacements in the plane (the semidirect product of rotations and translations), transform into themselves objects in a set
X, like the set of triangles, in such a way that we can compose such transformations in an associative way and we can transform back too:
3. Numbers and Groups
In this section we implement the group material exposed above through the sequence of numbers, from the most elementary ones to some sophisticated objects like octonions and Cayley algebras.
3.1. Sets , ,
In preamble, one should remember that Arithmetic with (cardinal) Hindu–Arabic numerals is easy while it is inextricable with (ordinal) Roman numerals (e.g.,
Figure 5).
The set of
natural numbers (note that including 0 is now the common convention among set theorists and logicians, maybe not with artists’ assent, see
Figure 6 and [
12]) equipped with addition, is not a group (no inverse), just an Abelian semi-group. Equipped with multiplication,
is an Abelian semi-group as well.
The set of rational integers , equipped with addition, is an Abelian group. Equipped with multiplication, it is a semi-group.
The set of rational integers modulo p, : , equipped with addition, is a finite Abelian group with p elements. Chirality corresponds to .
3.2. Example: Cubic Relations
Richard Kerner, in a comprehensive series of papers (refer to [
3] for a detailed review), posited that cubic (or ternary) relations possess the ability to encapsulate diverse symmetries in relation to the permutation group
or its cyclic subgroup
.
Significantly, these insights find applications in the -graded generalization of Grassmann algebras, manifesting in their realization within the realm of generalized exterior differential forms. Moreover, they play an important role in the development of gauge theory founded upon this differential calculus and in the ternary generalization of Clifford algebras. These advancements not only unlock new perspectives in mathematical structures but also extend their reach to the realm of physics, providing a framework for describing families of quarks.
3.3. Set
The set of rational numbers is defined as the set of equivalence classes of pairs of integers with , . The equivalence class of is denoted .
The set
, together with the addition and multiplication operations shown below, forms a
field:Actually, is the prototype of the concept of a field: a set in which addition, subtraction, multiplication, anddivision are defined and behave as the corresponding operations on rational numbers.
3.4. Is Not “Complete”
Let us equip the field
with the
metrical topology associated with the distance
between two rationals
x and
y. This topology gives a sense to the notion of a
Cauchy sequence of rationals: one says that
is Cauchy if, for all
, there exists
such that, for all
, one has
If is a convergent rational sequence (that is, ), then it is a Cauchy sequence. On the other hand not all Cauchy sequences of rationals are convergent in .
Our intuitive sense suggests that when a sequence of terms progressively approaches one another, they must be converging towards a specific value. Take, for instance, the sequence , an approximation for the positive solution to the algebraic equation , or the sequence , which approximates the non-algebraic (or transcendant) mythic length of the circumference of the unit circle. Both sequences adhere to the Cauchy criterion, signifying their terms draw near each other, yet they do not converge to a rational number.
This observation prompts the existence of certain “irrational” numbers, denoted as “
” and “
”, towards which these sequences converge. Consequently, to encompass these irrational values, as well as all other numbers that Cauchy sequences seem to approach, one extends the number system beyond rationals [
13].
3.5. Unreal “Real” Numbers Complete Real Rationals!
It is this intuition which motivated Cauchy to use such sequences to define the real numbers:
is a completion of
. The real numbers are constructed as
equivalence classes of Cauchy sequences [
14]. Two Cauchy sequences
and
of rational numbers are equivalent if
, i.e., if the sequence
tends to 0. The real numbers
are the equivalence classes of Cauchy sequences of rational numbers. That is, each such equivalence class is a real number. Through this construction,
inherits the algebraic field structure of
and is complete for the metric topology: all Cauchy sequences of real numbers are convergent in
. In this sense one says that
is the closure of
:
, i.e.,
contains all limit points of
. However, there is a big difference: while
is
countable, i.e., there exists a one-to-one map
, the field
is
uncountable. 3.6. Is Complete and “Algebraically Closed”
The algebraic equation
has no solution in
. So let us equip the set
(Cartesian product) with the commutative addition and multiplication operations:
Both operations afford
with a commutative field structure,
and
being the neutral elements for addition and multiplication, respectively. This is the field of complex numbers and is denoted by
. One introduces the “imaginary” number
, imaginary because it is the square root of
[
15,
16,
17]. Indeed, one checks that
, and so
is a solution of
(like the real
is a solution of
). The complex numbers also form the real vector space of dimension two, with
as a standard basis. This justifies the notation
.
Introducing the mirror symmetry with respect to the real axis, , one checks that . Equipped with the topology associated with the distance , is complete and, as a vector space, is isomorphic to the Euclidean plane.
Any algebraic equation , with complex coefficients, has n roots in , i.e., is algebraically closed (fundamental theorem of the algebra).
3.7. Complex Numbers Emerging from Tensor Product of Two Planes
There exists an interesting interpretation of the multiplication law (
1) in terms of the
tensor product of two planes. The tensor product stands as a cornerstone, arguably the most distinctive one, in the realm of quantum mechanics. In essence, the Cartesian product, traditionally employed to model two systems independently in classical physics, undergoes a transformative process known as quantization. This metamorphosis results in the emergence of the tensor product of two vector spaces, a fundamental framework indispensable for understanding the intricacies of quantum mechanical systems.
First, we remember that a vector space V over a field , e.g., or , is a set whose elements or vectors may be added together and multiplied (“scaled”) by elements (“scalars”) in . Two essential properties must be satisfied: the distributivity of scalar multiplication with respect to the vector addition and the distributivity of scalar multiplication with respect to field addition. Then, the tensor product of two vector spaces V and W (over the same field) is defined as the vector space over consisting of all bilinear forms from to . Note that while .
Hence, the tensor product
of the plane with itself, with basis
, is the four-dimensional vector space of bilinear forms
where
. Any
real matrix
A can decompose as
with
The matrices
were introduced by Pauli [
18]. Hence, we have for the matrix elements of
:
Due to the algebraic relations
one can give the decomposition of the matrix
the bicomplex form:
Due to
, which means that the
are square roots of
, whilst
, the expression
is a matrix representation of the complex number
with the correspondences
,
, and
. The multiplication law defined in (
1) perfectly aligns with the matrix multiplication operation represented as
. Now, any matrix of type (
5) can be factorized as
This is the matrix form of the expression of the complex number in terms of its polar coordinates, , , mod .
The correspondence
is not inherently absolute; an alternative choice could be
. This ambiguity arises from the existence of two possible orientations when defining trigonometric functions: clockwise and anticlockwise. It is crucial to recognize that this feature should not be disregarded when transitioning from a formalism based on complex numbers to one expressed in terms of real numbers [
19].
3.8. Two-Dimensional Lattices
3.8.1. General
Consider two complex numbers
and
such that
is not real. They define the (“Bravais”) lattice in the plane
with
lattice basis (or primitive)
and with
fundamental parallelogram [or
primitive (unit) cell] determined by
.
is a subgroup of
for the addition (∼ translation). Two pairs
and
are
equivalent if they generate the same lattice, i.e., if there exists
, such that
The set of such matrices form the noncommutative modular group PSL (relevant for Weirstrass elliptic functions).
There are five possible Bravais lattices in two-dimensional space: monoclinic (arbitrary
,
), tetragonal or (square
), hexagonal (
), orthorhombic (rectangular
,
), and orthorhombic centered (rectangular centered). They are shown in
Figure 7.
3.8.2. Graphene Example
A (two-dimensional) crystal is a periodic array of atoms. For the graphene (hexagonal lattice or honeycomb),
Figure 8, the primitive translation vectors are alternatively defined as:
which means that
.
5. Playing with Spheres
We now explore the world of unit spheres in light of group theory.
5.1. The Circle and Its Complexified Version
The unit circle is defined in the complex plane as . It is a compact multiplicative commutative group, denoted . One should think of the importance of this group in mathematics (e.g., Fourier series and integral) and in physics (e.g., gauge invariance in electrodynamics).
The complexified unit circle
is also a group. It is the non-compact multiplicative commutative group
An example is found with the motion of a particle on the unit circle: the corresponding phase space, i.e., the set of pairs (angular position, angular momentum) is the infinite cylinder
whose matrix form (
7) is obtained through the maps
for the first factor and
for the second factor.
We could as well consider the free motion on the two-dimensional de Sitter space–time [
36]. The latter has the topology
. It may be visualized as the one-sheet hyperboloid
.
The phase space for such a motion is also a one-sheet hyperboloid with the same cylinder topology. In this case both the configuration space and the phase space have SO0 as the invariance group.
5.2. The Sphere through Its Multifaceted Aspects
Our familiar sphere is “poor”: no intrinsic group structure, save the fact that it includes mythological structures, like the five Platonic solids (see next subsection). Then, let us consider the next one in the sequence: the sphere . It may be identified with the compact multiplicative noncommutative group corresponding to . Think of the importance of this group in mathematics (e.g., harmonic analysis in space) and in physics (angular momentum, spin, q-bit, …).
5.2.1. Sphere and Group SU
The relation of
to SU
is given by:
5.2.2. Sphere and Rotations in
Let us explain the relation between
and the proper rotations in space
. Any proper rotation in space is determined by a unit vector
defining the rotation axis and a rotation angle
about
in the direct sense, as is shown in
Figure 9.
The action of such a rotation,
, on a vector
is given by:
The correspondence between the element rotations
and the matrix form
of
is understood as follows:
5.3. Sphere and Quaternions (Hamilton, 1843)
Let us equip the set
with the commutative addition and noncommutative multiplication operations:
Both operations afford
with a noncommutative field structure,
and
being the neutral elements for addition and multiplication, respectively. This is the field of quaternions [
39,
40] (see also [
41] and references therein) and is denoted by
. One identifies
with the complex
u and one introduces the “quaternionic imaginary”
. One checks that
and the fundamental commutation rule
Hence, we have the bicomplex notation for quaternions:
With the notations
and
, one has as well
and
, with
. Quaternions form the real vector space
of dimension 4, with
as a standard basis. Quaternions with a null scalar component, i.e.,
, are said to be pure vector quaternions. It results that one can decompose a quaternion in two different forms:
With the bicomplex notation, one easily understands the origin of the multiplication law given in (
9). With the scalar–vector notations, the quaternionic multiplication reads as
Introducing the mirror symmetry with respect to the 0th axis, , one checks that , (involutive), , and the inverse of is given by .
5.4. Quaternions and Space Rotations
Expressed in “polar” coordinates
,
, one obtains the matrix realization of quaternions:
Hence, the correspondence (
8) between elements
and rotations
in space is now understood in terms of quaternions:
5.5. Coquaternions (Cockle, 1849) versus Quaternions
It is interesting to compare the matrix realization of quaternions with the decomposition (3) of the (Lie) algebra
composed of
real matrices. Forgetting this matrix realization and considering the matrix basis
as pure numbers
obeying the same algebraic relations as those given in (
2), one obtains the noncommutative ring
of numbers
,
,
, named
coquaternions [
42,
43] or
split-quaternions. Remember that rings are algebraic structures that generalize fields in the sense that multiplicative inverses need not exist. With this scalar–vector form, the multiplication law for coquaternions reads as
If instead we start from the bicomplex form (4) and adopt the one-to-one correspondence matrix ↔ coquaternion
then the multiplication law reads
a formula to be compared with (
9).
Ring
is equipped with the isotropic quadratic form
where
is the
conjugate of
q. Each coquaternion
q with
has inverse
. One checks that
.
The multiplicative group of coquaternions with
form the unit pseudo-sphere in
:
The topology of
is that of the Cartesian product
. This is inferred from the parametrization with
:
Like the matrix realization of
is SU
, the matrix realization of
is the group SL
. The symmetry group of the quadratic form (
15) on
is O
.
5.6. Complex Quaternions
The ring of complex quaternions is the tensor product
. It is just obtained from
by extending real scalars to complex ones in (
11):
Note the biquaternion form of a complex quaternion:
(the correct writing should be
), which corresponds to the isomorphism
. The matrix representation of
is analogous to (
13):
This establishes the ring isomorphism
. For more in-depth information, refer to [
37] where these objects are efficiently utilized to describe the two-fold covering Sp
of the anti-de Sitter group SO
0.
5.7. The Complexified Sphere
The complexified sphere
is also a group. It is the (universal) covering
of the Lorentz group
. Let us consider the motion of a particle on
. The phase space is the cotangent bundle
This phase space can be identified with the complex sphere
through the following parametrization of the latter:
We could as well consider the free motion on the 3 + 1-dimensional de Sitter space–time. The latter may be viewed as a one-sheeted hyperboloid embedded in a five-dimensional Minkowski space with metric
:
For the past few years it has been becoming a realistic model for our space–time because of the observed nonzero value of the cosmological constant
, a model accompanied by concepts like “dark energy” or “quintessence”. The phase space for the motion of a test particle on the de Sitter space–time also has the topology
or equivalently the complexified
. In this case both configuration space and phase space have
as the invariance group. More details are found in the volume [
36].
5.8. The Sphere , Its Icosians and Its Icosian Ring
The group
has a finite subgroup denoted here by
with 120 elements, named icosians by Hamilton. There exists an icosian game invented by Hamilton [
44,
45]. It is a kind of Eulerian path through the 20 vertices of the dodecahedron, the dual polyhedron of the icosahedron (see
Figure 10, and the nice illustration in [
46]): a path such that every vertex is visited a single time, no edge is visited twice, and the ending point is the same as the starting point. Winning strategies use the icosian group
.
One has the isomorphism , where Y is the symmetry group (60 proper rotations) of the icosahedron (or of its dual, the dodecahedron).
Let us consider, together with the quaternionic unity 1, three unit-norm quaternions describing through (
14) 72° rotations around three distinct five-fold axes of the icosahedron,
Here,
is the golden mean, with
, both being algebraic integers, solutions of the algebraic equation with integer coefficients
The
-span of
is the icosian ring
[
48] which fills densely
. One shows that
where
is the extension ring of the golden mean.
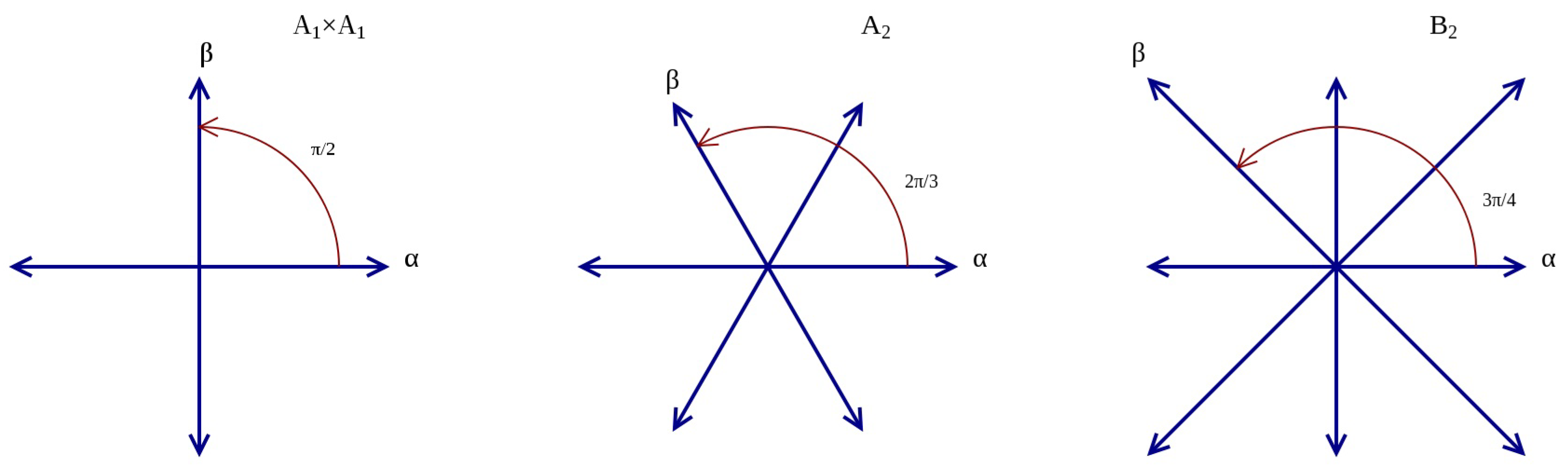
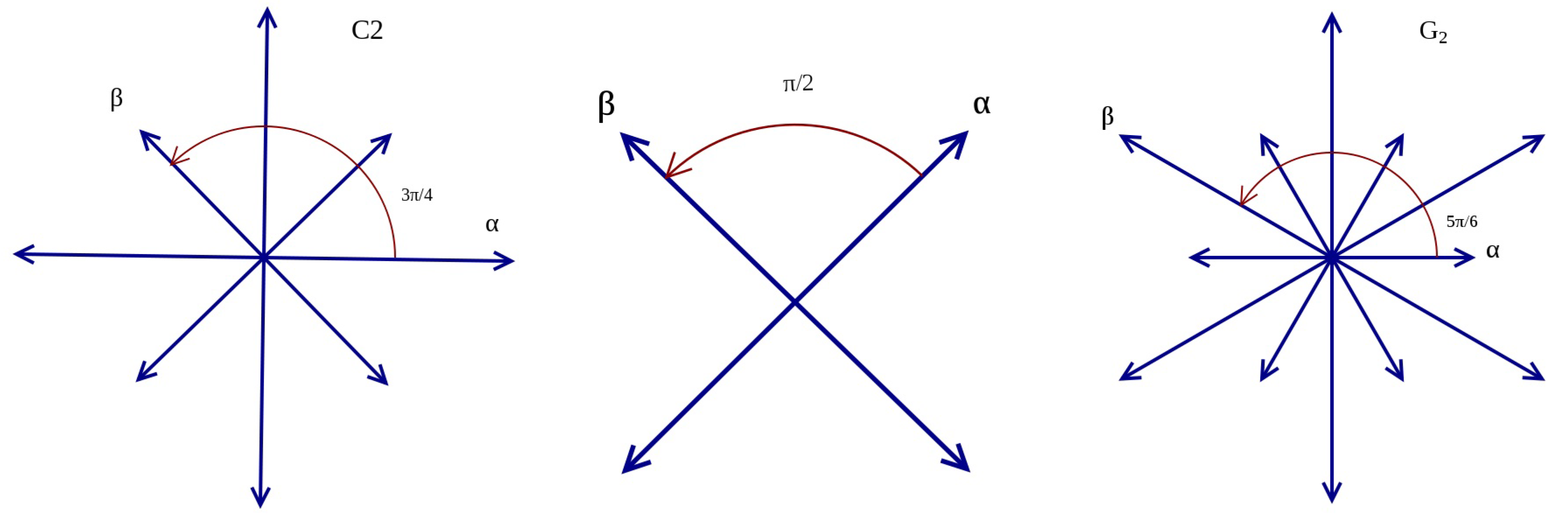
5.9. The Root System and Quasicrystals
Let us now consider the root system
. It is made of 240 vectors in
. The corresponding root lattice
is the
-span of
. Because of the crystallographic properties of
, we have the following:
where the
s are the basis roots of the corresponding Dynkin diagram shown in
Figure A2.
Subsequently, by selecting a particular four-dimensional plane within possessing a distinct “golden mean” orientation and executing the orthogonal projection of the root lattice onto this hyperplane, the result is the formation of the icosian ring .
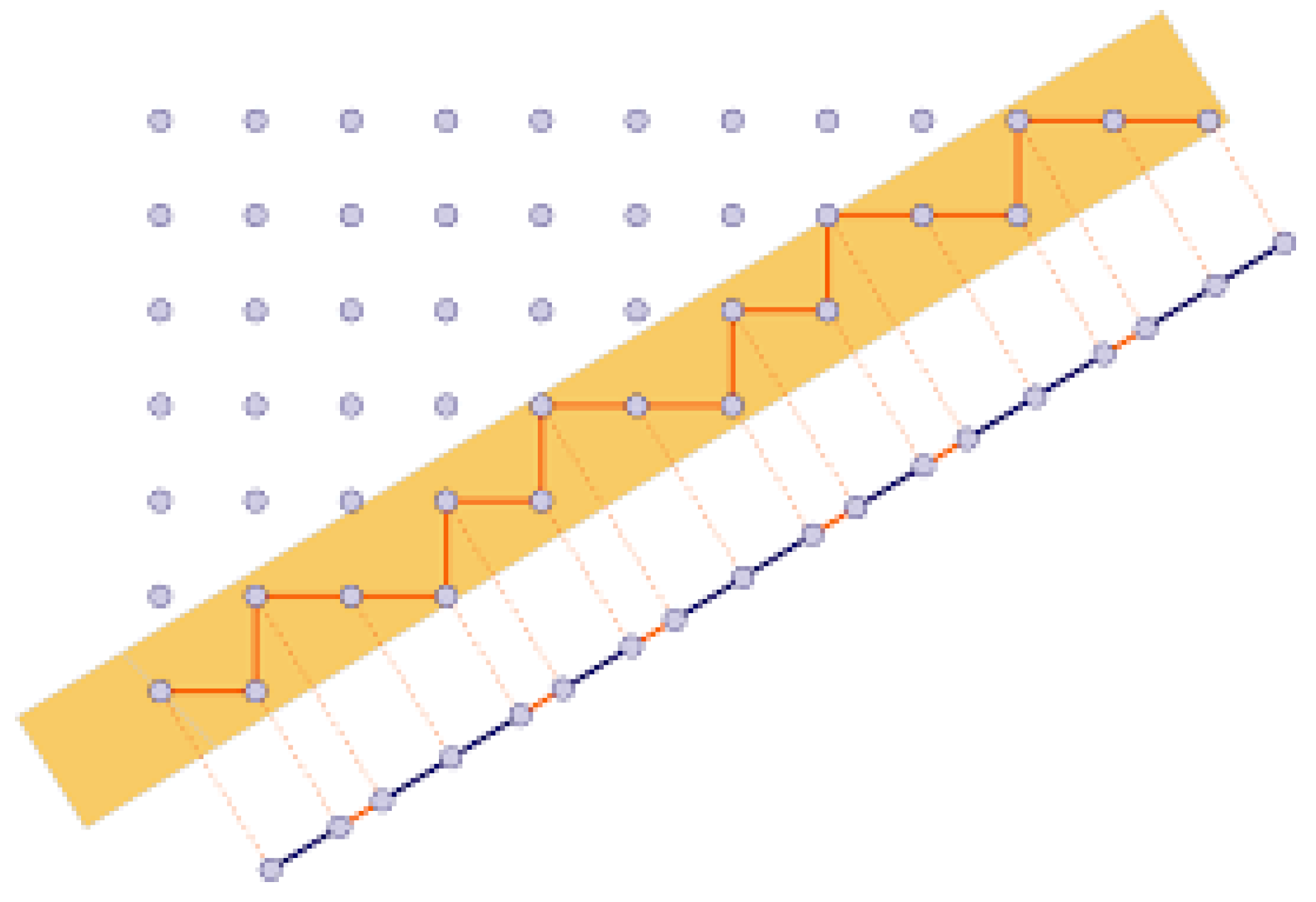
Similar manipulations on the
root lattice projected onto
, on the
root lattice projected onto the plane
, and on the
root lattice projected onto the real line
, accompanied by “cuts” based on the choice of appropriate “windows”, produce standard models for three-, two-, and one-dimensional quasicrystals (e.g., icosahedral quasicrystals, Penrose tilings, Fibonacci chain …), as is shown in
Figure 11 [
49].
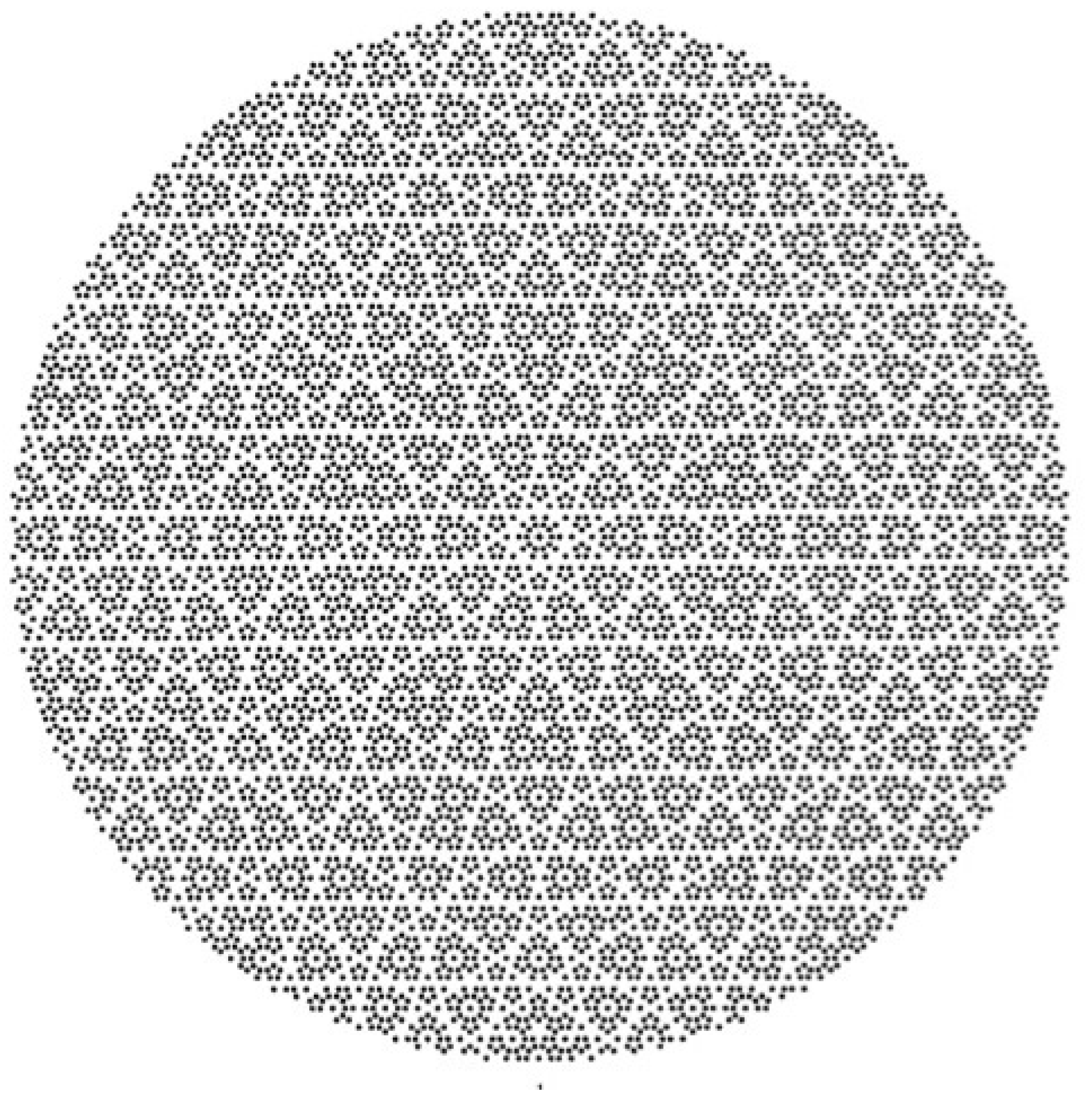
In
Figure 12 is shown an example of an observed quasicrystalline surface.
5.10. Algebraic Modeling of Quasicrystals
The identified self-similarity factors, denoted by , within quasicrystals exhibit a distinctive mathematical nature known as quadratic Pisot–Vijayaraghavan (PV) numbers. In essence, these numbers correspond to roots greater than 1 of specific quadratic polynomials. These polynomials possess a leading coefficient of 1 and consist of integer coefficients. Notably, the other root of these polynomials is characterized by an absolute value less than 1.
In the case presented above, the factor is the golden mean
. The other ones are
Each value of
serves as the defining parameter for a discrete set on the number line, denoted as
or the set of “beta-integers”, as introduced in [
51] (see also [
52] and references therein). This set is specifically designed to function analogously to integers within the context of quasicrystalline investigations. A visual representation of this concept is illustrated in
Figure 13, depicting the first tau-integers in proximity to the origin.
Beta-lattices are designed to serve as direct substitutes for traditional lattices within the unique framework of quasicrystals. Much like lattices are built upon sets of integers, beta-lattices find their structural basis in beta-integers. This deliberate choice aligns with the goal of seamlessly adapting mathematical structures to the intricate properties of quasicrystals. A typical beta-lattice
is defined as:
with
a base of
. Examples are shown in
Figure 14 and
Figure 15.
5.11. Sphere and Octonions (Graves, 1843, Cayley, 1845)
Like
, the algebra
of octonions [
53,
54] is built by providing the Cartesian product
with the commutative addition and the noncommutative and non-associative product:
Let us introduce the eight octonionic basis numbers:
(unity) and
with the commutation rules
We then obtain the biquaternion notation for octonions:
In octonionic calculations we should be aware of the non-associativity of the product, e.g., whilst .
The octonionic conjugate of the octonion
x is defined as
This operation allows defining the Euclidean norm of
and its inverse if
.
Conjugation is involutive: and one checks that .
Like the bicomplex notation (
10)–(
12) for quaternions, we also have the quadricomplex notation for octonions:
The Hurwitz theorem establishes that the real numbers , complex numbers , quaternions , and octonions stand as the exclusive normed division algebras over the real numbers, up to isomorphism. Normed in the sense that the product of any two elements satisfies the norm property: . Moreover, these four algebras represent the sole examples of alternative, finite-dimensional division algebras over the real numbers.
A general rotation in
, i.e., an element among the 28 elements of SO
, can be written through successive right multiplications:
For a recent review on the role of octonions in Nuclear Physics, see [
55].
6. Higher Spheres and Hopf Maps and Fibrations
What about
? There is nothing really special from a strictly group point of view when we deal with higher-dimensional spheres. Naturally, many interesting topological features exist, like the Hopf fibrations [
56,
57].
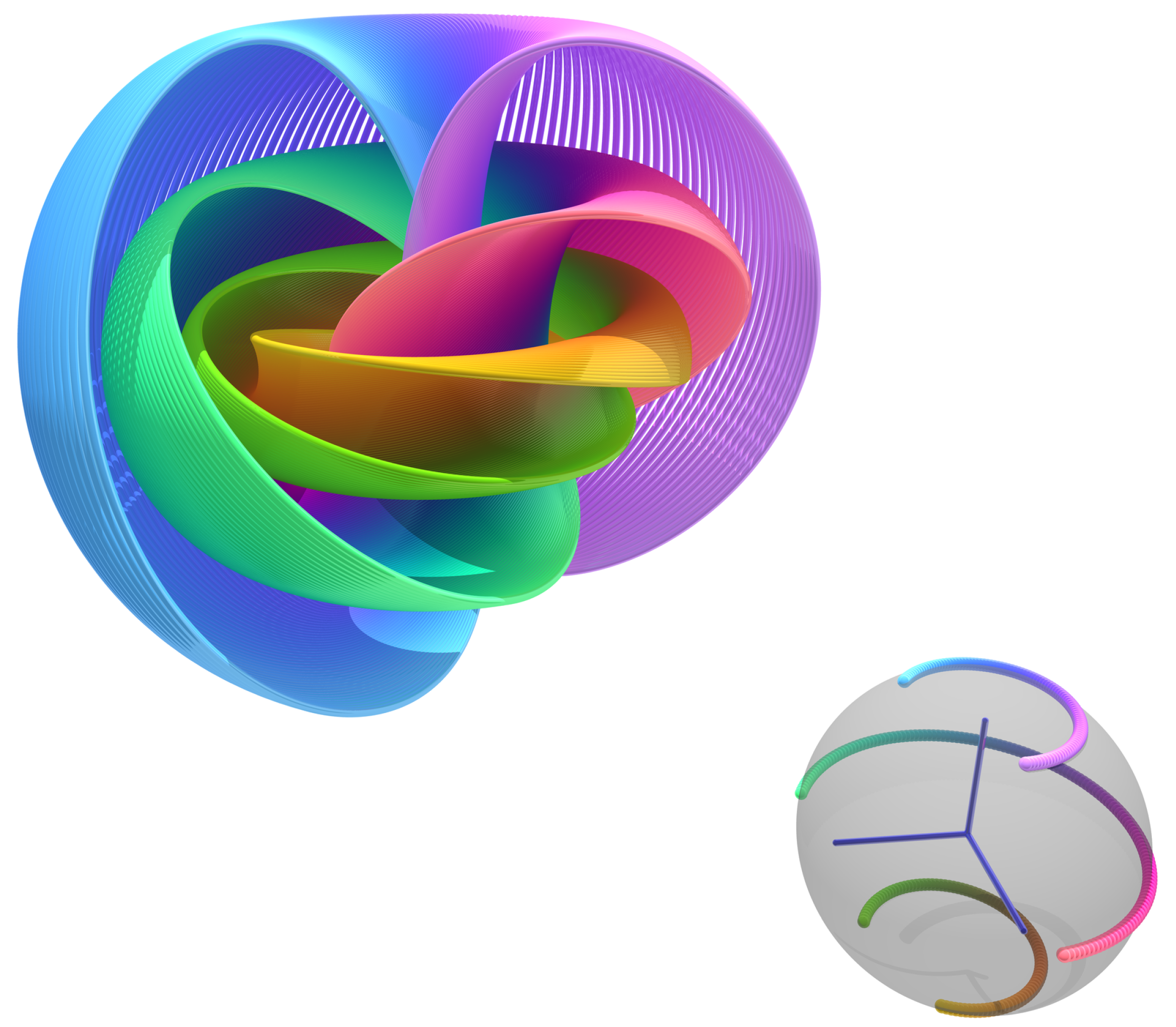
6.1. Hopf Fibrations
These are the following relations involving spheres,
:
where “↪” stands for embedding and
p is the Hopf map. The first one is displayed in
Figure 16.
The Hopf construction, in its broader application, yields circle bundles in the form of over complex projective space. This construction is essentially a restriction of the topological line bundle over to the unit sphere in .
Note the elementary example where one considers embedded in and factoring out by unit real multiplication. One then obtains . This results in a fiber bundle with the circle as the fiber.
Extending these constructions, one can view within quaternionic n-space () and factor out by unit quaternion multiplication () to obtain . Notably, a bundle with fiber emerges from this construction, connecting quaternionic and real projective spaces.
Similarly, leveraging octonions leads to a bundle with fiber .
These constructions are often referred to as Hopf bundles, encompassing the realms of real, quaternionic, and octonionic Hopf bundles. Importantly, Adams’ theorem asserts that these bundles represent the exclusive instances of fiber bundles with spheres as the total space, base space, and fiber.
Hopf fibration surfaces show up in the description of quantum entanglement [
58,
59]. In particle physics they underlie the mathematics of the Dirac monopole. It also appears in general relativity, for instance, in the Robinson congruence (see for instance [
60]).
6.2. Group Interpretation of the First Hopf Map:
Let us consider the element
of
which brings the north pole of
to the direction
:
This gives the quadratic relations which exemplify the projection
p (Hopf’s map) of
onto the base space
:
One easily checks that the Hopf inverse of a point is a circle and that the Hopf inverse of a circle is a torus .
6.3. Group Interpretation of the Second HOPF Map:
We here consider the special group isomorphism proper to
(see
Figure A1):
It is understood through the action of the group
G on specific
-quaternionic matrices
Just consider the group element
,
, which brings the “north pole” of
,
, to the point
. We have
, i.e.,
. This gives the quadratic relations:
The Hopf inverse of a point is the sphere and the Hopf inverse of a sphere is .
6.4. Group Interpretation of the Third Hopf Map:
The octonionic Hopf fibration finds its elegant description through the lens of the automorphism group G2 of the normed algebra of octonions. Actually, one can grasp its essence by considering the group Spin
(where Spin
serves as the two-fold covering of SO
), as explained in [
61].
7. Kepler–Coulomb Problem and Spheres
Concluding our exploration of the world of spheres, it is essential to acknowledge the pivotal role played by
and
, and their complexified versions, in understanding the symmetries of a particle’s motion subjected to the Kepler or Coulomb potential. Alongside the harmonic oscillator, it stands as one of the most emblematic examples of integrable systems within the domain of Galilean classical or quantum mechanics. This symmetry elucidates, at the quantum level, the empirical laws discovered by Balmer in 1885 [
62] for describing the spectral line emissions of the hydrogen atom. The literature on this topic is extensive (see, for instance, the review [
35]), and its content can attain a high level of mathematical sophistication. To provide some insight, we will first examine in detail the one-dimensional case before sketching the main concepts of the realistic three-dimensional model. It is worth noting that providing a comprehensive account of the symmetries inherent in the Kepler–Coulomb problems, both classically and quantum mechanically, would necessitate delving into a much broader scope of material.
7.1. One-Dimensional Kepler–Coulomb Problem
Consider the energy of a particle of mass
m trapped in a well determined on the positive line
by the attractive Kepler–Coulomb potential:
and
for
. Its energy is given by
Regularizing the Kepler problem in the case of negative energy consists in considering the alternative equation:
where
. Let us see how the Balmer laws [
62] come to light from the symmetry
. One considers the three observables defined on the upper half-plane viewed as the phase space
:
Their Poisson brackets
obey the commutation relations of the Lie algebra
of
:
After quantization of these classical observables, say
, Poisson brackets become commutators, quantum counterparts become (essentially) self-adjoint operators acting in some Hilbert space of quantum states, and a specific unitary irreducible representation of
is involved, precisely, that one for which the generator
has nonzero positive integers multiples of
as spectral values. This is due to the fact the inverse operator
is compact. Remember that an operator
A on a infinite-dimensional Hilbert space
is said to be compact if it can be written in the form
where
and
are orthonormal sets (not necessarily complete) and the
s form a sequence of positive numbers with limit zero (they can accumulate only at zero). Since the classical equation
becomes
, the spectral condition leads directly to the Balmer-like quantization of the energy:
7.2. Phase Space of the Regularized 1D Kepler–Coulomb Problem: The Complexified Circle with Zero Radius
Let us show that the phase space of the regularized 1D Kepler problem is the complexified circle with zero radius.
Following the Fock method [
63,
64] for displaying the symmetry of the H-atom, let us introduce the circle variable
(inverse stereographic projection transforming the compactified momentum real line into the unit circle). By imposing that this change of variable be part of a canonical transformation of the phase space, the conjugate variable
to
reads:
One easily checks the two constraints:
Therefore, the pair
parametrizes the complex circle in
with null radius:
This is a geometric model for the phase space of the one-dimensional regularized Kepler problem, which can be identified to (cotangent bundle on with the zero-section deleted, named Moser manifold or Kepler manifold).
7.3. Phase Space of the Three-Dimensional Regularized Kepler–Coulomb Problem
The above material is easily generalizable to three dimensions. Indeed, the phase space of the three-dimensional regularized Kepler problem is the complexification of with radius 0.
Following Fock again in dealing with the more realistic three-dimensional Kepler–Coulomb problem, let us introduce the
variable
(inverse stereographic projection transforming the 3D-compactified momentum space into a 3-sphere).
By requiring that this change of variable be part of a canonical transformation of the phase space, the conjugate variable
to
together with
parametrizes the complexification of
in
with a null radius. This is the phase space of the three-dimensional regularized Kepler problem, which can be identified with
(cotangent bundle on
with the zero-section deleted, Moser manifold or Kepler manifold, as named by Souriau [
65]).
The three-dimensional aspect of this structure explains the accidental degeneracy of the discrete spectrum of the hydrogen atom with its SO symmetry.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}