
Design and Characterization of a Self-Aligning End-Effector Robot for Single-Joint Arm Movement Rehabilitation

 , , , , and
, , , , and
Abstract
:1. Introduction
- (a)
- be used for providing assisted training in single-joint movements, which may be relevant for severely impaired patients;
- (b)
- track human limb kinematics while interacting with a human subject during therapy without the use of additional sensors. Previous work has demonstrated that RGB+D cameras [15] or body-worn inertial measurement units [16] can be used to track human limb kinematics by fusing information with the robot’s endpoint kinematics data.
- (a)
- capable of adaptive training of single- and multi-joint arm movements in 3D with titrated gravity support; single-joint movements would be suitable for severely affected patients, while coordinated multi-joint movements would be suitable for moderately impaired patients with sufficient strength but poor coordination.
- (b)
- ability to track the joint kinematics of the human arm to provide feedback and track progress.
2. Methods
2.1. Kinematics
2.1.1. AREBO’s Kinematic Chain
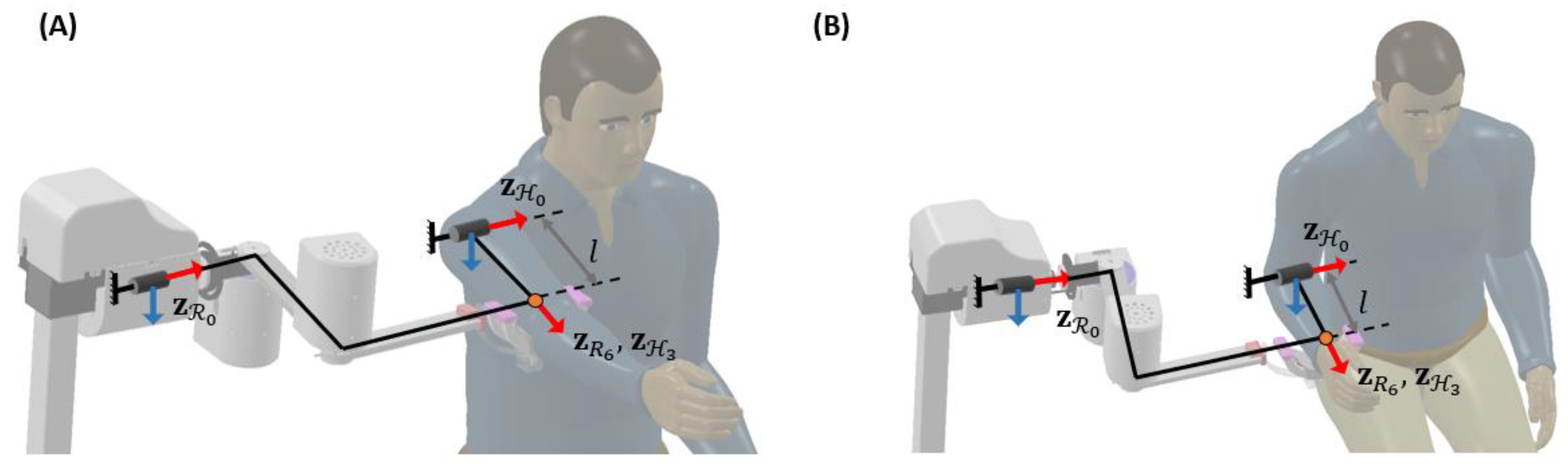
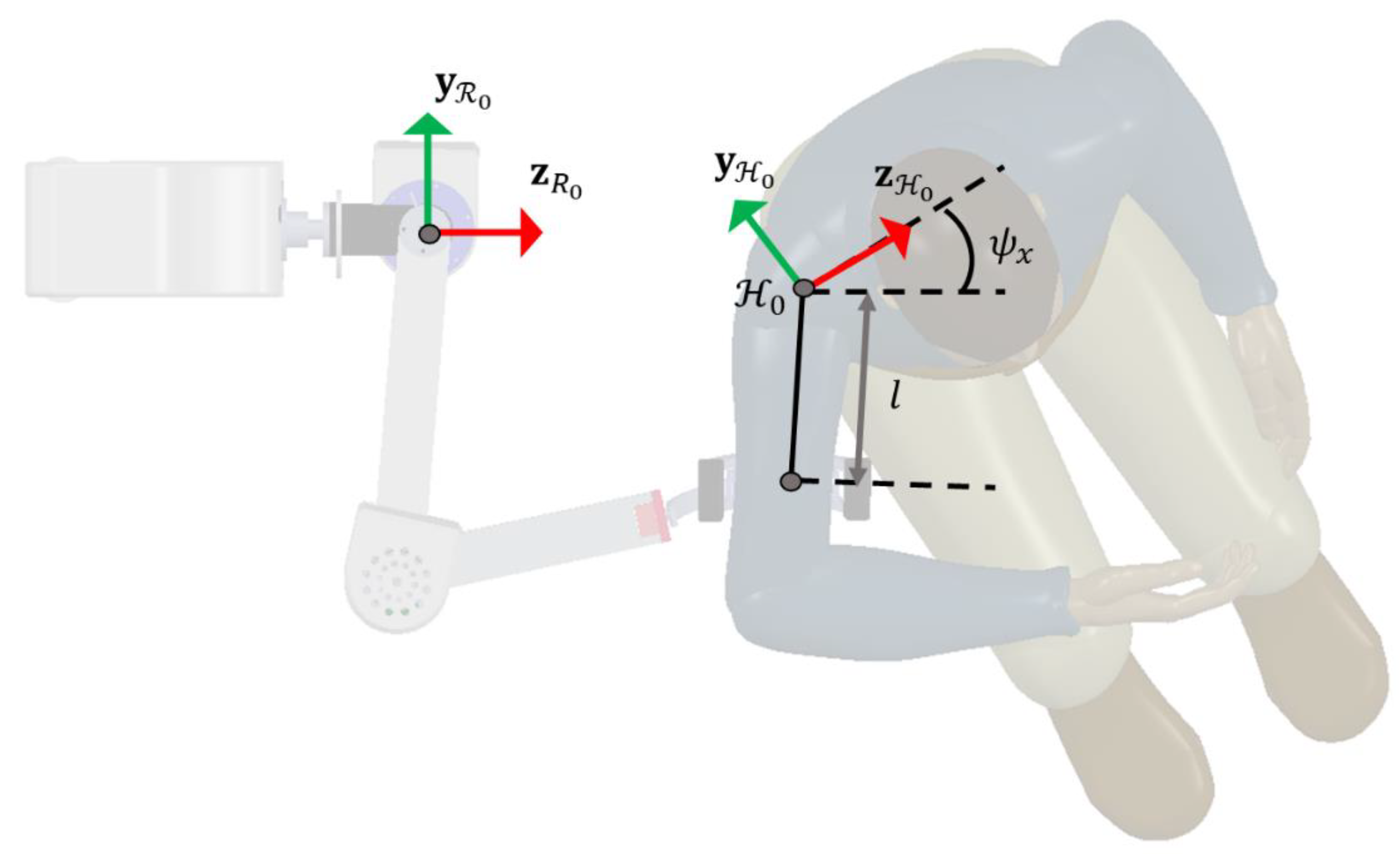
2.1.2. Human–Robot Closed Loop Kinematic Chain
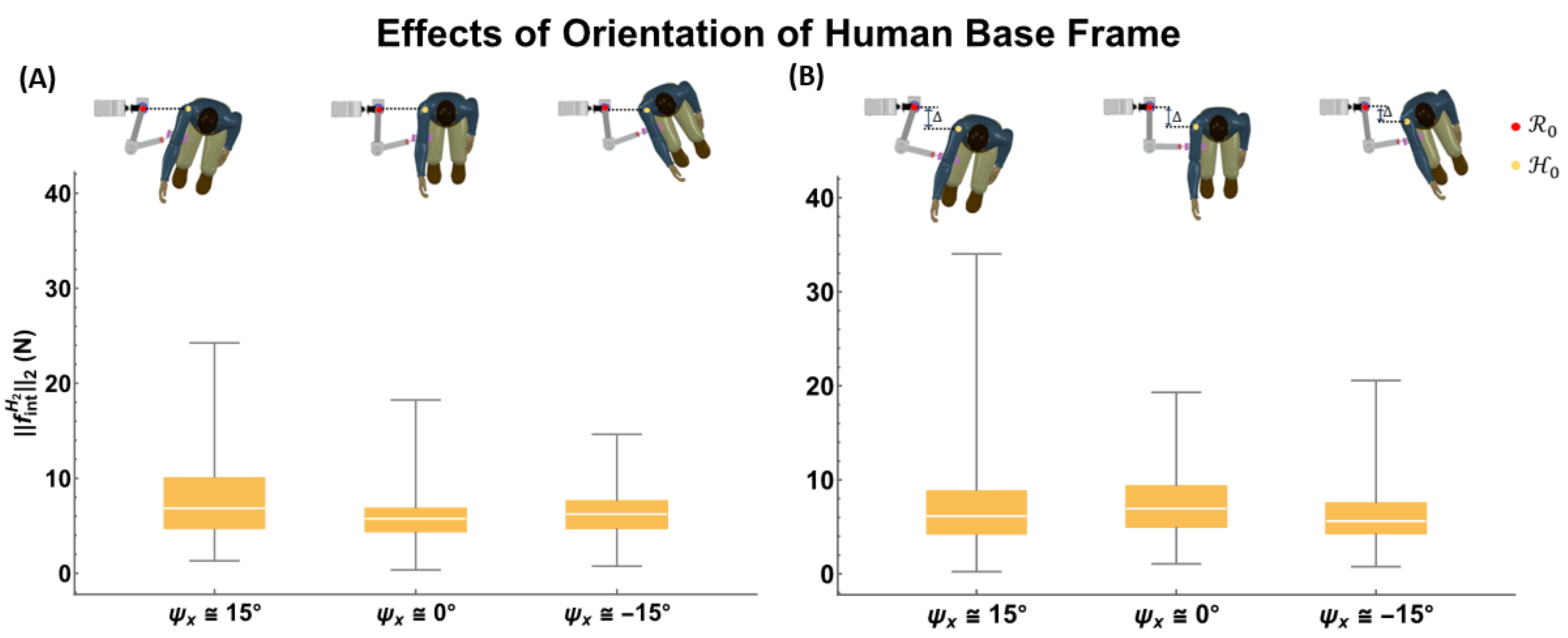
- The human base frame is located close enough to the robot’s base frame such that the intersection between the robot and human arm workspaces has a non-zero area.
- The endpoint of the arm is attached to the spherical joint at the robot’s endpoint, such that , where and are the positions of the robot and arm endpoints with respect to the robot’s base reference frame .
- The orientation of the human base frame with respect to the robot’s base frame; is assumed to be rotated around the -axis.
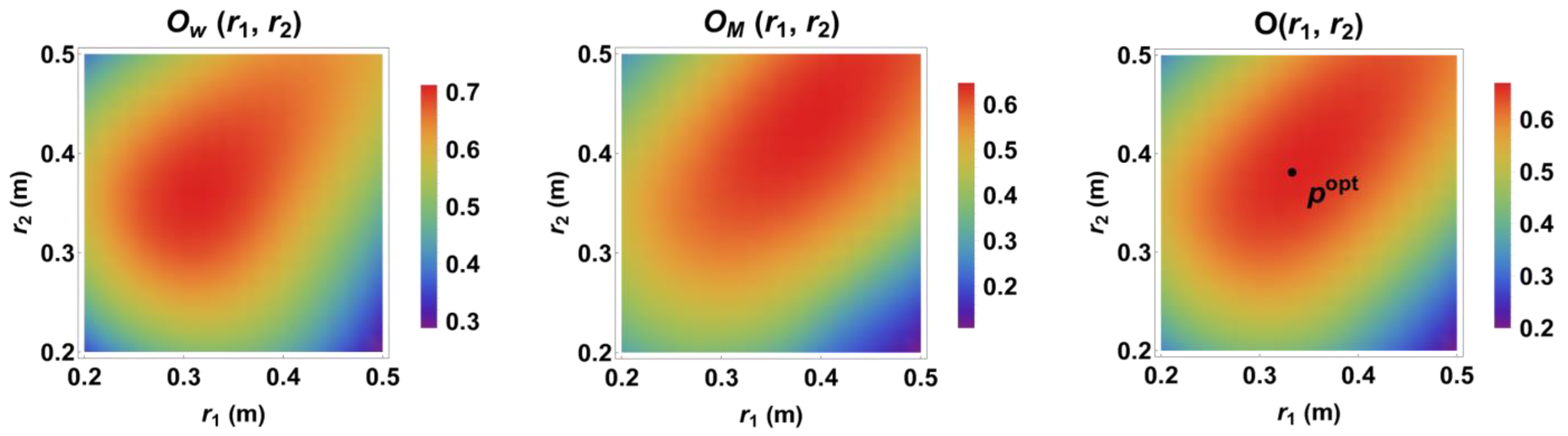
2.1.3. Optimization of Link Lengths
2.2. Robot Hardware
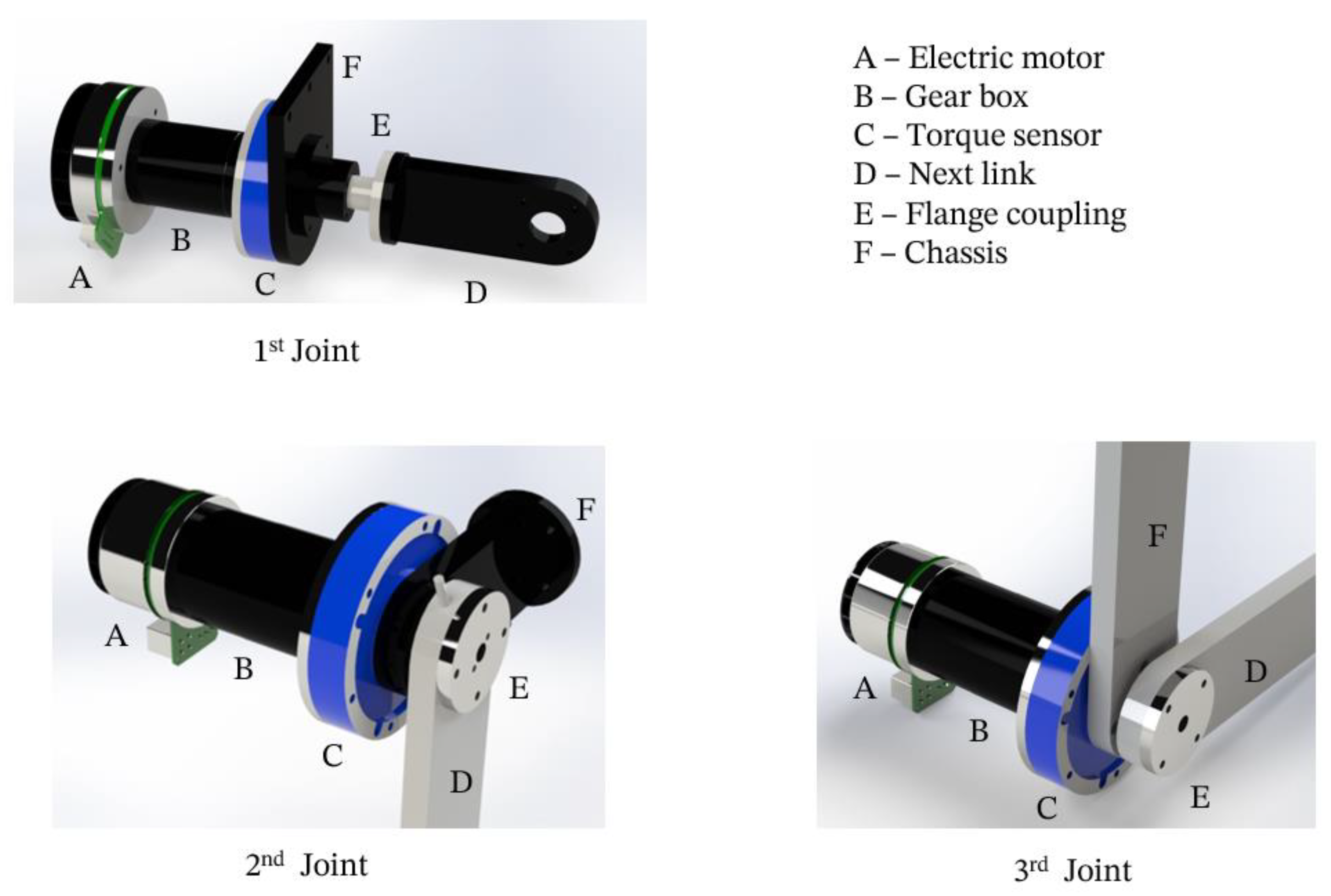
2.2.1. Mechanical Design
2.2.2. Joint Actuation and Sensing
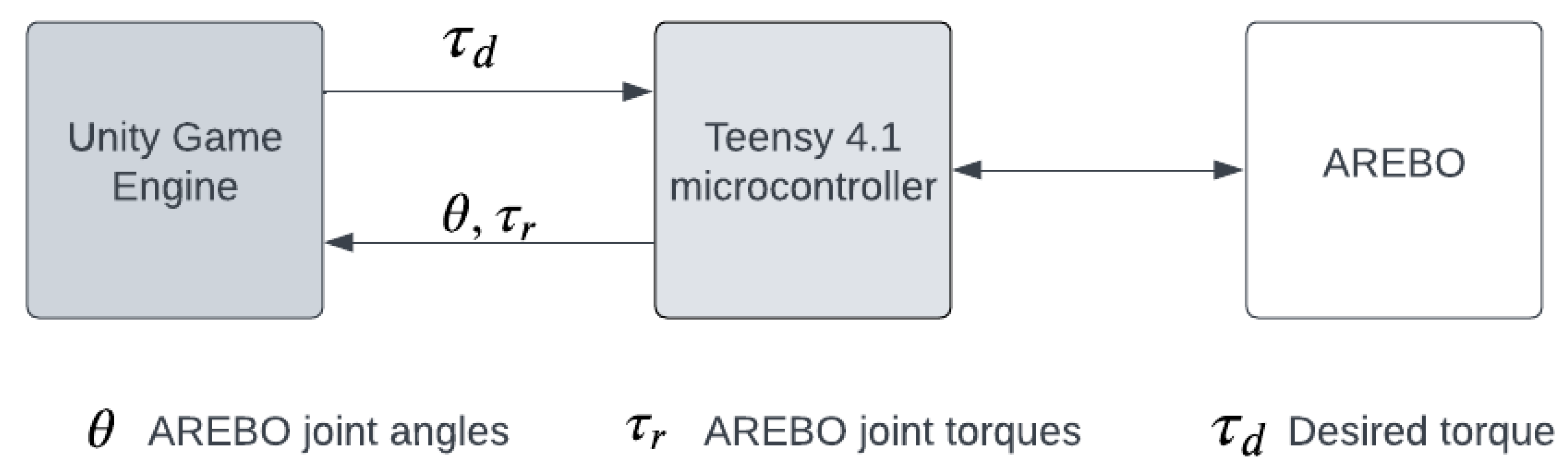
2.2.3. Firmware and Software
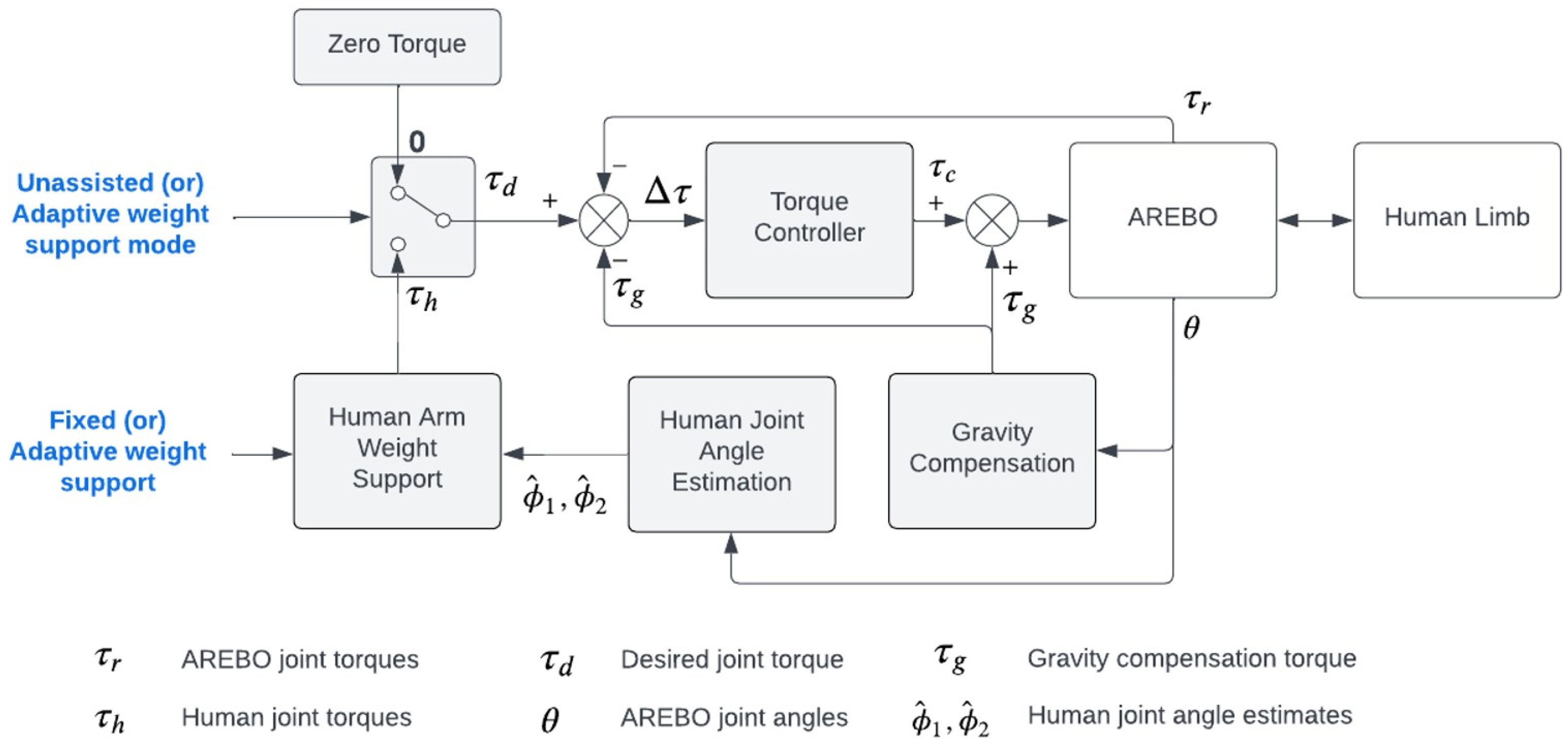
2.3. AREBO Human–Robot Physical Interaction: Controller Details
- (a)
- Unassisted mode (UAM): This mode allows subjects to perform voluntary active movements with no physical robotic assistance and minimal interaction forces from the robot’s mechanical structure, which is necessary to actively engage patients during training and assess their residual ability.
- (b)
- Adaptive weight support mode (WSM): In this control mode, the robot and user work together to complete a task. While the user voluntarily moves the arm, the robot provides just the amount of weight support needed to compensate for the weakness in the arm. The support from the robot can be fixed or adaptive depending on the training type desired by the user.
- (a)
- Low-level current control loop: At the lowest level, a current control loop is implemented by the Maxon motor controllers for each individual motor.
- (b)
- High-level torque control loop: A high-level torque control loop is implemented for each actuated robot using the joint torque sensors to control the interaction force between the arm and AREBO applied at the robot’s endpoint.
- (c)
- Gravity compensation module: A gravity compensation module that computes the torques required at the robot joints to hold the robot in a particular joint configuration against gravity.
- (d)
- Human joint estimation module: This module allows the estimation of the human joint angle from the robot’s joint angles without the need for any additional sensor on the arm.
- (e)
- Human arm weight support module: This module estimates the torque required to provide a given level of weight support to the arm based on the estimate of the arm’s joint angles.
2.3.1. High-Level Torque Control Loop
- is the current time instant.
- The subscript indicates that these are variables associated with DOF.
- is the output of the PD controller at the time instant .
- is the torque required to fully compensate for the weight of the robot at the current joint configuration .
- is the desired torque, which is manipulated for implementing the unassisted and adaptive weight support control modes.
- is the torque read by the robot’s joint torque sensor, which contains the torque required to hold the robot in the current configuration , and the torque due to the interaction force .
- and are the parameters of the PD controllers. The same fixed controller parameters are used for the 2nd and 3rd DOFs of the robot, while these two parameters are piecewise constant functions of the interaction torque for the 1st DOF (details in the Supplementary Material).
2.3.2. Gravity Compensation
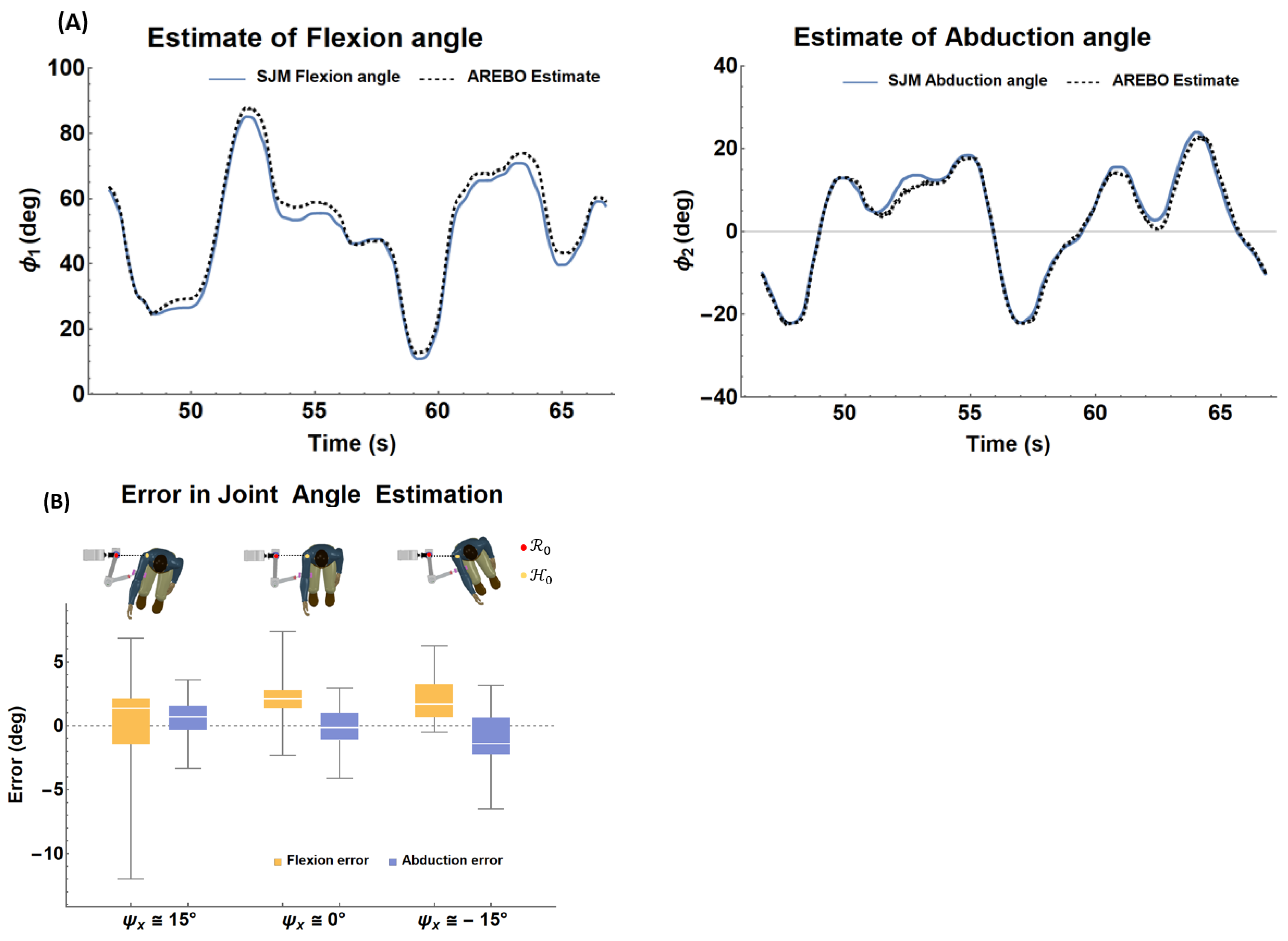
2.3.3. Human Joint Angle Estimation
2.3.4. Human Arm Weight Support
- is the trial number (an integer greater than 0).
- is a binary variable indicating the success or failure of trial .
- is the forgetting factor that reduces the amount of arm support following successful trials.
- is the learning factor that increases the amount of de-weighting following a failed trial.
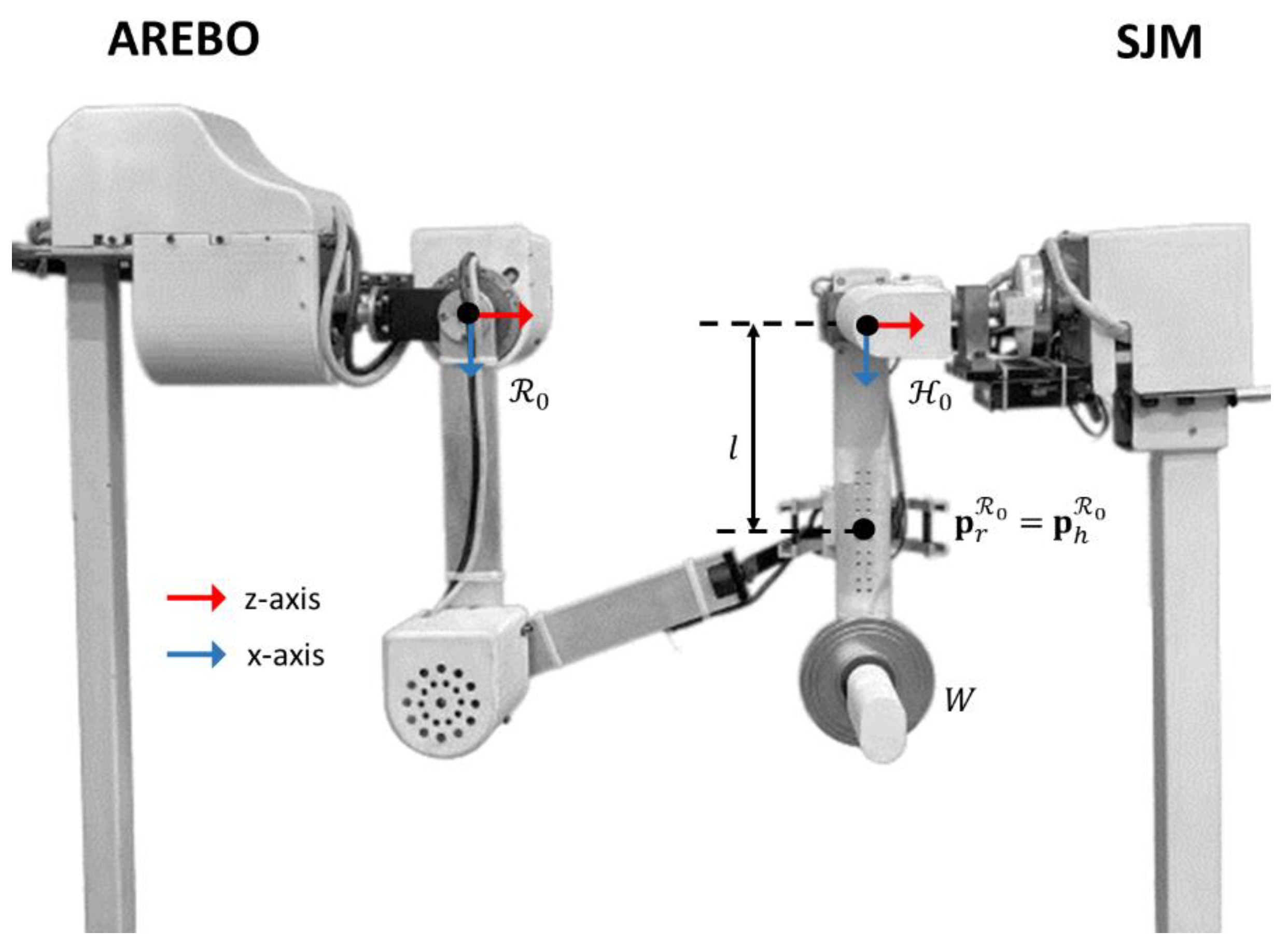
2.4. Experiments with AREBO
2.4.1. Shoulder Joint Model (SJM)
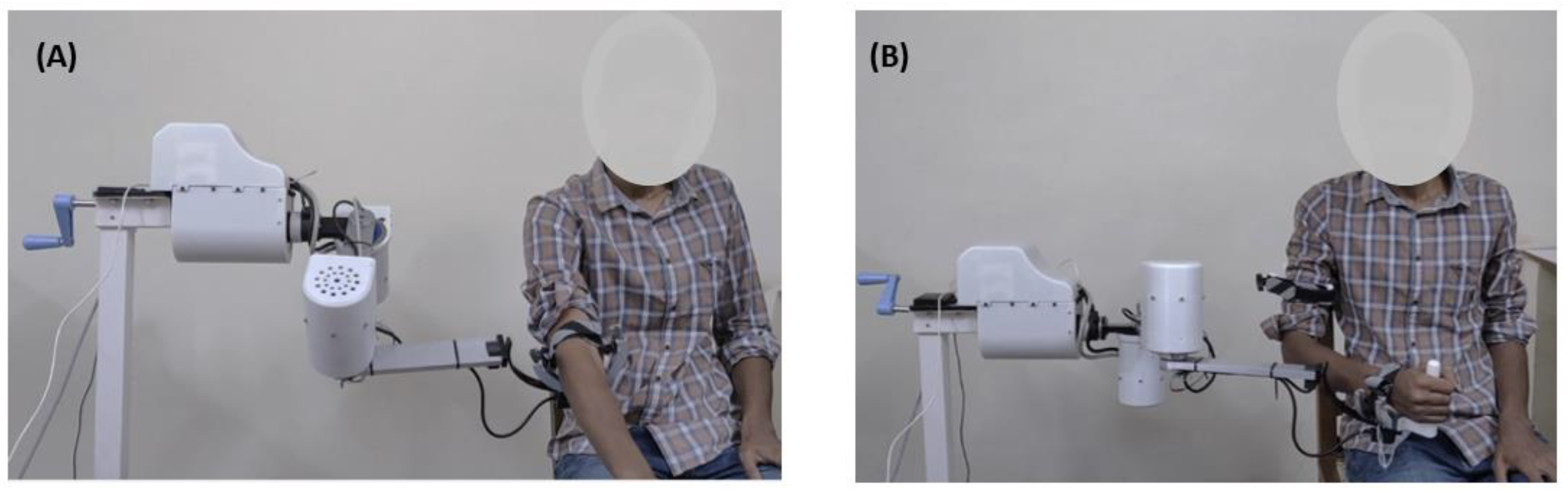
2.4.2. Demonstration of Self-Aligning Feature of AREBO
2.4.3. Accuracy of Human Joint Angle Estimation
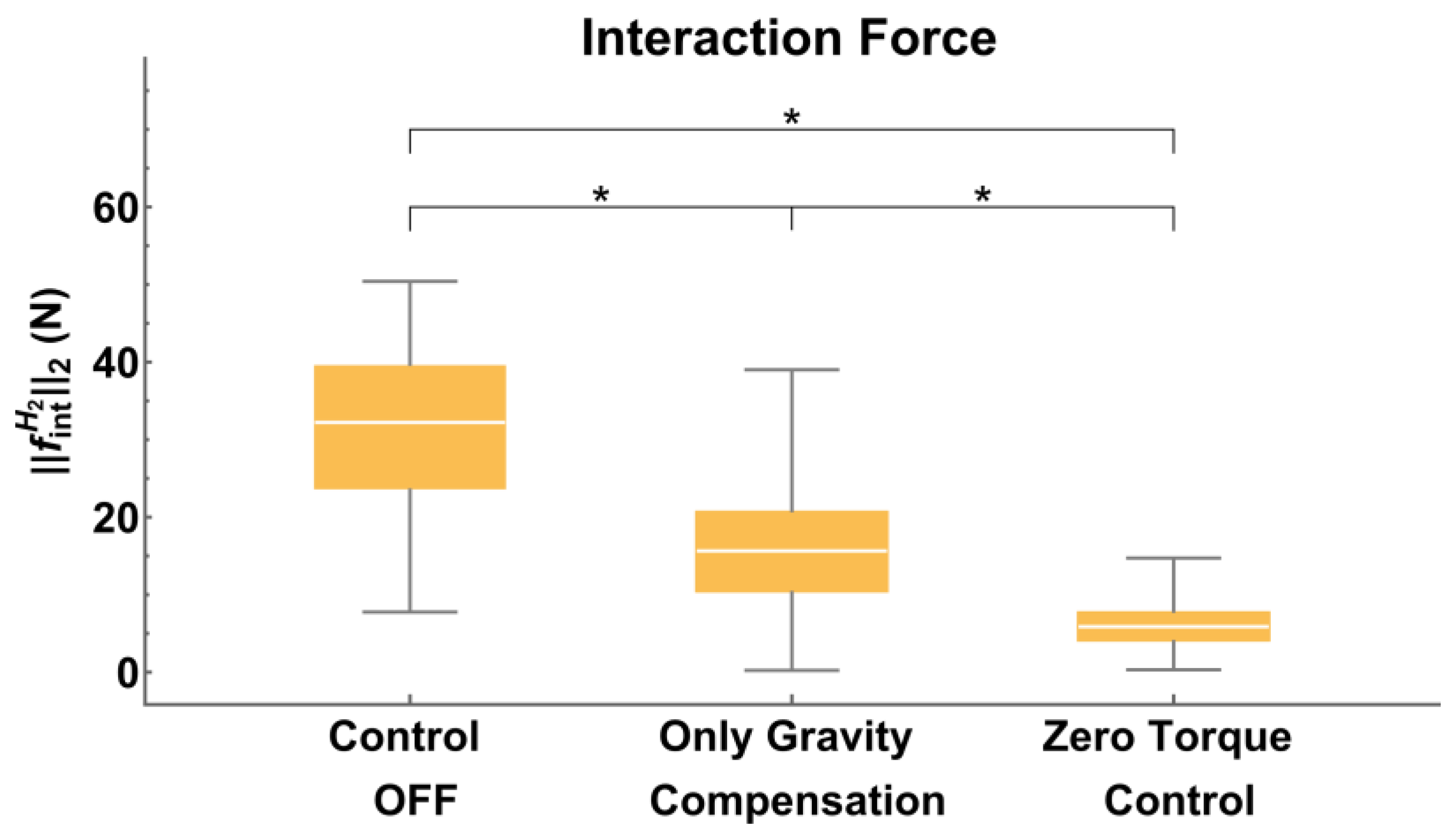
2.4.4. Transparency of the Unassisted Mode (UAM)
- Control OFF: The actuators of the robot were switched off, which requires the SJM to work against AREBO’s inertia, weight, and friction. This condition provides a measure of the forces required to move AREBO with zero actuation.
- Only Gravity Compensation: The gravity compensation module alone is switched on, and the output of the torque controller is set to zero, i.e., . In this condition, AREBO’s weight is fully compensated, and the SJM must only work against AREBO’s inertia and friction.
- Zero Torque Control: The entire controller is enabled with the weight support parameter set to zero , i.e., no weight support for the arm is provided. In this mode, the AREBO controller works to keep the interaction force zero. The lower the magnitude of , the better the robot’s transparency.
2.4.5. Effect of the Adaptive Weight Support (WSM)
3. Results
3.1. Optimum Link Lengths
3.2. Self-Aligning Feature of AREBO
3.3. Accuracy of Human Joint Angle Estimation
3.4. Transparency of the Unassisted Mode
3.5. Training with the Adaptive Weight Support Mode
4. Discussion
- Extension of the algorithms for multi-joint shoulder-elbow arm training, along with exploring the feasibility of using vision-based methods for tracking trunk, shoulder, and elbow kinematics [32].
- Characterizing the different components of the robot with healthy subjects, including the algorithm for estimating human joint angles, the unassisted mode for evaluating the transparency, and the adaptive weight support mode.
- Development of therapy games for unassisted and adaptive weight support training with the robot.
- Evaluation of the usability of the robot for arm rehabilitation on different neuromusculoskeletal conditions.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feigin, V.L.; Brainin, M.; Norrving, B.; Martins, S.; Sacco, R.L.; Hacke, W.; Fisher, M.; Pandian, J.; Lindsay, P. World Stroke Organization (WSO): Global Stroke Fact Sheet 2022. Int. J. Stroke 2022, 17, 18–29. [Google Scholar] [CrossRef] [PubMed]
- Kamalakannan, S.; Venkata, M.G.; Prost, A.; Natarajan, S.; Pant, H.; Chitalurri, N.; Goenka, S.; Kuper, H. Rehabilitation Needs of Stroke Survivors After Discharge from Hospital in India. Arch. Phys. Med. Rehabil. 2016, 97, 1526–1532.e9. [Google Scholar] [CrossRef] [PubMed]
- Hankey, G.J.; Jamrozik, K.; Broadhurst, R.J.; Forbes, S.; Anderson, C.S. Long-Term Disability After First-Ever Stroke and Related Prognostic Factors in the Perth Community Stroke Study, 1989–1990. Stroke 2002, 33, 1034–1040. [Google Scholar] [CrossRef] [PubMed]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef]
- Zimmermann, Y.D.; Forino, A.; Riener, R.; Hutter, M. ANYexo: A Versatile and Dynamic Upper-Limb Rehabilitation Robot. IEEE Robot. Autom. Lett. 2019, 4, 3649–3656. [Google Scholar] [CrossRef]
- Nef, T.; Riener, R. ARMin—Design of a novel arm rehabilitation robot. In Proceedings of the 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005; pp. 57–60. [Google Scholar] [CrossRef]
- Kim, B.; Deshpande, A.D. An upper-body rehabilitation exoskeleton Harmony with an anatomical shoulder mechanism: Design, modeling, control, and performance evaluation. Int. J. Robot. Res. 2017, 36, 414–435. [Google Scholar] [CrossRef]
- Pan, J.; Astarita, D.; Baldoni, A.; Dell’Agnello, F.; Crea, S.; Vitiello, N.; Trigili, E. NESM-γ: An Upper-Limb Exoskeleton with Compliant Actuators for Clinical Deployment. IEEE Robot. Autom. Lett. 2022, 7, 7708–7715. [Google Scholar] [CrossRef]
- Qian, W.; Liao, J.; Lu, L.; Ai, L.; Li, M.; Xiao, X.; Guo, Z. CURER: A Lightweight Cable-Driven Compliant Upper Limb Rehabilitation Exoskeleton Robot. IEEE/ASME Trans. Mechatron. 2022, 28, 1730–1741. [Google Scholar] [CrossRef]
- Zahedi, A.; Wang, Y.; Lau, N.; Ang, W.T.; Zhang, D. A Bamboo-Inspired Exoskeleton (BiEXO) Based on Carbon Fiber for Shoulder and Elbow Joints. IEEE Trans. Med. Robot. Bionics 2023, 5, 375–386. [Google Scholar] [CrossRef]
- Gasperina, S.D.; Gandolla, M.; Longatelli, V.; Panzenbeck, M.; Luciani, B.; Braghin, F.; Pedrocchi, A. AGREE: A Compliant-Controlled Upper-Limb Exoskeleton for Physical Rehabilitation of Neurological Patients. IEEE Trans. Med. Robot. Bionics 2023, 5, 143–154. [Google Scholar] [CrossRef]
- Buccelli, S.; Tessari, F.; Fanin, F.; De Guglielmo, L.; Capitta, G.; Piezzo, C.; Bruschi, A.; Van Son, F.; Scarpetta, S.; Succi, A.; et al. A Gravity-Compensated Upper-Limb Exoskeleton for Functional Rehabilitation of the Shoulder Complex. Appl. Sci. 2022, 12, 3364. [Google Scholar] [CrossRef]
- Hogan, N.; Krebs, H.I.; Charnnarong, J.; Srikrishna, P.; Sharon, A. MIT—MANUS: A workstation for manual therapy and training I. In Proceedings of the IEEE International Workshop on Robot and Human Communication, Tokyo, Japan, 1–3 September 1992; pp. 161–165. [Google Scholar] [CrossRef]
- Campolo, D.; Tommasino, P.; Gamage, K.; Klein, J.; Hughes, C.M.; Masia, L. H-Man: A planar, H-shape cabled differential robotic manipulandum for experiments on human motor control. J. Neurosci. Methods 2014, 235, 285–297. [Google Scholar] [CrossRef] [PubMed]
- Valdés, B.A.; Van der Loos, H.F.M. Biofeedback vs. game scores for reducing trunk compensation after stroke: A randomized crossover trial. Top. Stroke Rehabil. 2017, 25, 96–113. [Google Scholar] [CrossRef] [PubMed]
- Passon, A.; Schauer, T.; Seel, T. Inertial-Robotic Motion Tracking in End-Effector-Based Rehabilitation Robots. Front. Robot. AI 2020, 7, 554639. [Google Scholar] [CrossRef]
- Molteni, F.; Gasperini, G.; Cannaviello, G.; Guanziroli, E. Exoskeleton and End-Effector Robots for Upper and Lower Limbs Rehabilitation: Narrative Review. PM&R 2018, 10, S174–S188. [Google Scholar] [CrossRef]
- Crocher, V.; Fong, J.; Bosch, T.J.; Tan, Y.; Mareels, I.; Oetomo, D. Upper Limb Deweighting Using Underactuated End-Effector-Based Backdrivable Manipulanda. IEEE Robot. Autom. Lett. 2018, 3, 2116–2122. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Guguloth, S.; Mohammed, J.S.; Sujatha, S. A self-aligning end-effector robot for individual joint training of the human arm. J. Rehabil. Assist. Technol. Eng. 2021, 8, 205566832110198. [Google Scholar] [CrossRef]
- Proietti, T.; Crocher, V.; Roby-Brami, A.; Jarrasse, N. Upper-limb robotic exoskeletons for neurorehabilitation: A review on control strategies. IEEE Rev. Biomed. Eng. 2016, 9, 4–14. [Google Scholar] [CrossRef]
- Marchal-Crespo, L.; Reinkensmeyer, D.J. Review of control strategies for robotic movement training after neurologic injury. J. Neuroeng. Rehabil. 2009, 6, 20. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009; pp. 1–370. [Google Scholar] [CrossRef]
- Rosen, J.; Perry, J.C.; Manning, N.; Burns, S.; Hannaford, B. The human arm kinematics and dynamics during daily activities—Toward a 7 DOF upper limb powered exoskeleton. In Proceedings of the 2005 International Conference on Advanced Robotics, ICAR’05, Proceedings, Seattle, WA, USA, 18–20 July 2005; pp. 532–539. [Google Scholar] [CrossRef]
- Fong, J.; Crocher, V.; Tan, Y.; Oetomo, D.; Mareels, I. EMU: A transparent 3D robotic manipulandum for upper-limb rehabilitation. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 771–776. [Google Scholar]
- Ellis, M.D.; Sukal-Moulton, T.; Dewald, J.P.A. Progressive Shoulder Abduction Loading is a Crucial Element of Arm Rehabilitation in Chronic Stroke. Neurorehabilit. Neural Repair 2009, 23, 862–869. [Google Scholar] [CrossRef]
- Vertechy, R.; Frisoli, A.; Dettori, A.; Solazzi, M.; Bergamasco, M. Development of a new exoskeleton for upper limb rehabilitation. In Proceedings of the 2009 IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 188–193. [Google Scholar]
- Jarrasse, N.; Tagliabue, M.; Robertson, J.V.G.; Maiza, A.; Crocher, V.; Roby-Brami, A.; Morel, G. A methodology to quantify alterations in human upper limb movement during co-manipulation with an exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 389–397. [Google Scholar] [CrossRef] [PubMed]
- Just, F.; Özen, Ö.; Bösch, P.; Bobrovsky, H.; Klamroth-Marganska, V.; Riener, R.; Rauter, G. Exoskeleton transparency: Feed-forward compensation vs. disturbance observer. Automatisierungstechnik 2018, 66, 1014–1026. [Google Scholar] [CrossRef]
- Beer, R.F.; Ellis, M.D.; Holubar, B.G.; Dewald, J.P. Impact of gravity loading on post-stroke reaching and its relationship to weakness. Muscle Nerve 2007, 36, 242–250. [Google Scholar] [CrossRef] [PubMed]
- Lan, Y.; Yao, J.; Dewald, J.P.A. The Impact of Shoulder Abduction Loading on Volitional Hand Opening and Grasping in Chronic Hemiparetic Stroke. Neurorehabilit. Neural Repair 2017, 31, 521–529. [Google Scholar] [CrossRef]
- Guadagnoli, M.A.; Lee, T.D. Challenge Point: A Framework for Conceptualizing the Effects of Various Practice Conditions in Motor Learning. J. Mot. Behav. 2004, 36, 212–224. [Google Scholar] [CrossRef]
- Dev, T.; Reetajanetsureka Selvaraj, S.; Magimairaj, H.P.; Balasubramanian, S. Accuracy of Single RGBD Cam-era-Based Upper-Limb Movement Tracking Using OpenPose. Biosyst. Biorobot. 2022, 28, 251–255. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values (cm) | No of Values | |
|---|---|---|---|
| CS | {20, 22, …, 50} | 16 | |
| FS | {33.1, 33.2, …, 34.9} | 19 | |
| CS | {20, 22, …, 50} | 16 | |
| FS | {37.1, 37.2, …, 38.9} | 19 | |
| {15, 17.5, 20} | 3 | ||
| {−10, 0, 10} | 3 | ||
| {20, 30, 40} | 3 | ||
| (deg) | {−30, 0, 30} | 3 | |
| Motor | Gearbox | Torque Sensor | Encoder | |
|---|---|---|---|---|
| 1st Joint | EC Flat 90, Nominal torque—0.953 Nm, part no. 607950 | GP 52 C, Gear ratio: 53:1, part no. 223090 | FTHC, Range—40 Nm | MILE, 4096 CPT, Part no., 651168 |
| 2nd Joint | EC Flat 60, Nominal torque—0.563 Nm, part no. 614649 | GP 52 C, Gear ratio: 43:1, part no. 223089 | FTHC, Range—20 Nm | MILE, 4096 CPT, Part no., 651168 |
| 3rd Joint | EC Flat 60, Nominal torque—0.563 Nm, part no. 614649 | GP 52 C, Gear ratio: 43:1, part no. 223089 | FTHC, Range—20 Nm | MILE, 4096 CPT, Part no., 651168 |
| 4th Joint | Unactuated joint | Calt, 1000 CPT, Model no. PD30-08G1000BST5 | ||
| 5th Joint | Unactuated joint | Calt, 1000 CPT, Model no. PD30-08G1000BST5 | ||
| 6th Joint | Unactuated and not instrumented | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mathavan Jeyabalan, P.K.; Nehrujee, A.; Elias, S.; Magesh Kumar, M.; Sujatha, S.; Balasubramanian, S. Design and Characterization of a Self-Aligning End-Effector Robot for Single-Joint Arm Movement Rehabilitation. Robotics 2023, 12, 149. https://doi.org/10.3390/robotics12060149
Mathavan Jeyabalan PK, Nehrujee A, Elias S, Magesh Kumar M, Sujatha S, Balasubramanian S. Design and Characterization of a Self-Aligning End-Effector Robot for Single-Joint Arm Movement Rehabilitation. Robotics. 2023; 12(6):149. https://doi.org/10.3390/robotics12060149
Chicago/Turabian StyleMathavan Jeyabalan, Prem Kumar, Aravind Nehrujee, Samuel Elias, M. Magesh Kumar, S. Sujatha, and Sivakumar Balasubramanian. 2023. "Design and Characterization of a Self-Aligning End-Effector Robot for Single-Joint Arm Movement Rehabilitation" Robotics 12, no. 6: 149. https://doi.org/10.3390/robotics12060149
APA StyleMathavan Jeyabalan, P. K., Nehrujee, A., Elias, S., Magesh Kumar, M., Sujatha, S., & Balasubramanian, S. (2023). Design and Characterization of a Self-Aligning End-Effector Robot for Single-Joint Arm Movement Rehabilitation. Robotics, 12(6), 149. https://doi.org/10.3390/robotics12060149