

Real-Time Multi-Robot Mission Planning in Cluttered Environment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Work
1.2. Contributions, Organization, and Notations
- A parallel real-time algorithm, RPM;
- Capability of handling dynamic obstacles and tasks in a cluttered environment at run-time;
- Good scalability in terms of the number of robots and tasks, and relatively good optimality;
- Computational burden analysis for RPM.
2. Problem Formulation
3. Algorithm
3.1. Task Segmentation
| Algorithm 1: Task Segmentation | |||||
| Input: , | |||||
| 1 | Initialize , , by k-means++ [30], | ||||
| 2 | while do | ||||
| 3 | for task do | ||||
| 4 | ← the index of ’s nearest centroid | ||||
| 5 | append(i) | ||||
| 6 | for do | ||||
| 7 | ← mean of all tasks within cluster j | ||||
| 8 | |||||
| 9 | for do | ||||
| 10 | return , , | ||||
3.2. Cluster Assignment
| Algorithm 2: Cluster Assignment | |||||
| Input: , , | |||||
| 1 | for robot do | ||||
| 2 | for do | ||||
| 3 | |||||
| 4 | Solve (5) by a numerical solver | ||||
| 5 | parse_result() | ||||
| 6 | return | ||||
3.3. Single-Robot Mission Planning
| Algorithm 3: Parallel Multi-Robot Mission Planning | |||||||
| Input: | |||||||
| 1 | // robots parallelly execute the content in parfor | ||||||
| 2 | parfor robot do | ||||||
| 3 | Initialize as empty | ||||||
| 4 | for start, goal in do | ||||||
| 5 | |||||||
| 6 | path_finding() | ||||||
| 7 | append() | ||||||
| 8 | for node do | ||||||
| 9 | for node do | ||||||
| 10 | load_path() | ||||||
| 11 | compute_cost() | ||||||
| 12 | solve (6) by a numerical solver | ||||||
| 13 | parse_path() | ||||||
| 14 | return | ||||||
3.4. RPM at Run-Time
| Algorithm 4: RPM at Run-time | |||||
| 1 | Initialize by k-means++ [30] | ||||
| 2 | while do | ||||
| 3 | update task set | ||||
| 4 | update robot position | ||||
| 5 | update obstacle | ||||
| 6 | Algorithm 1 with previous | ||||
| 7 | remove empty task cluster | ||||
| 8 | Algorithm 2 | ||||
| 9 | Algorithm 3 | ||||
| 10 | robots move one step along | ||||
| 11 | time moves one step forward | ||||
| 12 | current assigned task of robot | ||||
| 13 | delete task if | ||||
4. Comparisons and Experiments
4.1. Experiments
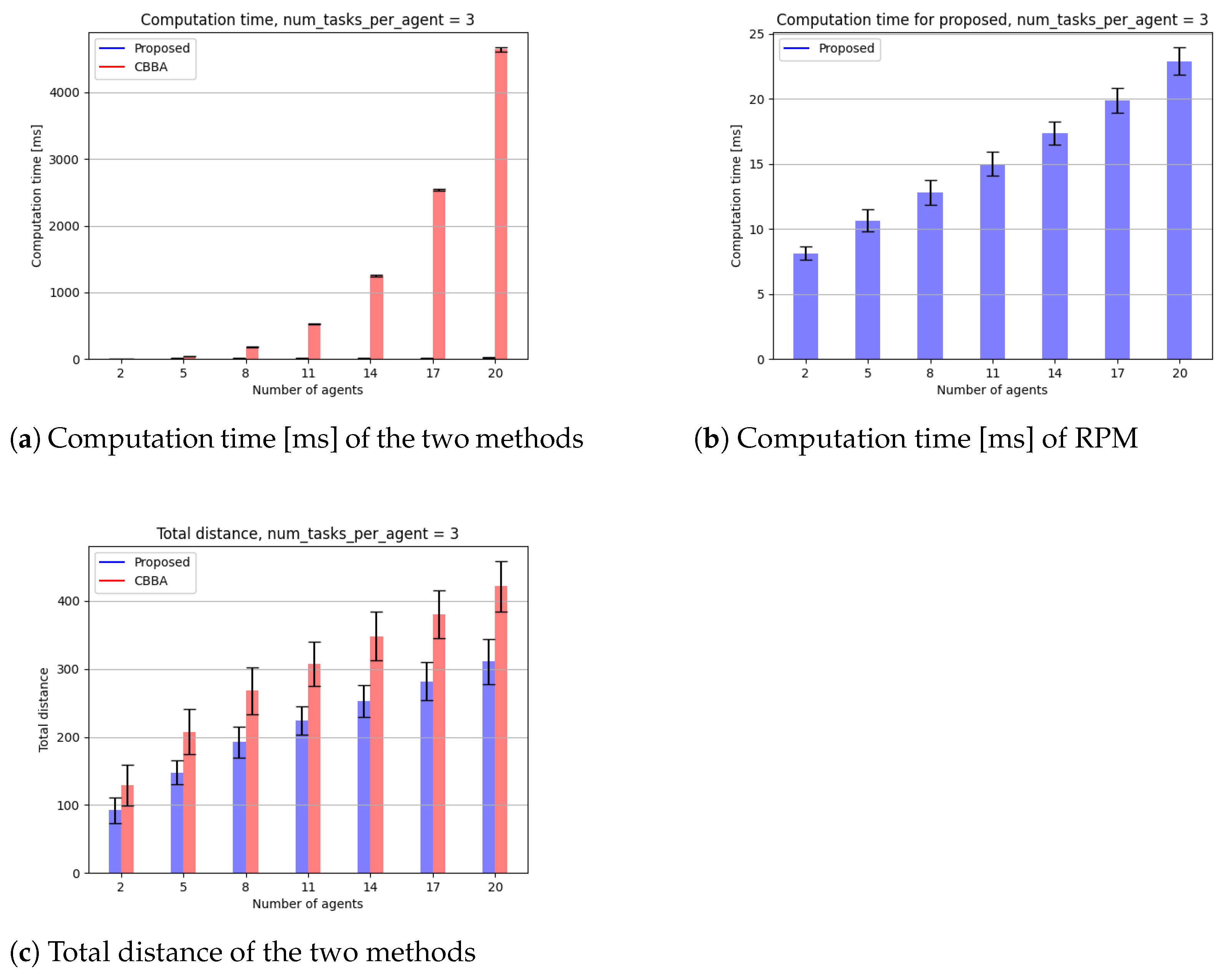
4.2. Comparison with Increased Number of Robots
4.3. Comparison with Increased Number of Tasks
4.4. Computational Burden Analysis
4.5. Optimality Gap in Small-Size Problems
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Herbert, S.L.; Chen, M.; Han, S.; Bansal, S.; Fisac, J.F.; Tomlin, C.J. FaSTrack: A modular framework for fast and guaranteed safe motion planning. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), IEEE, Melbourne, Australia, 12–15 December 2017; pp. 1517–1522. [Google Scholar]
- Kousik, S.; Holmes, P.; Vasudevan, R. Safe, aggressive quadrotor flight via reachability-based trajectory design. In Proceedings of the ASME 2019 Dynamic Systems and Control Conference, American Society of Mechanical Engineers Digital Collection, Park City, UT, USA, 8–11 October 2019. [Google Scholar]
- Tordesillas, J.; Lopez, B.T.; How, J.P. Faster: Fast and safe trajectory planner for flights in unknown environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Macau, China, 4–8 November 2019; pp. 1934–1940. [Google Scholar]
- Danielson, C.; Berntorp, K.; Weiss, A.; Di Cairano, S. Robust motion planning for uncertain systems with disturbances using the invariant-set motion planner. IEEE Trans. Autom. Control 2020, 65, 4456–4463. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S. Rapidly-exploring random trees: A new tool for path planning. Res. Rep. 9811 1998. [Google Scholar]
- Daniel, K.; Nash, A.; Koenig, S.; Felner, A. Theta*: Any-angle path planning on grids. J. Artif. Intell. Res. 2010, 39, 533–579. [Google Scholar] [CrossRef]
- Nash, A.; Koenig, S.; Tovey, C. Lazy Theta*: Any-angle path planning and path length analysis in 3D. In Proceedings of the Proceedings of the AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 11–15 July 2010; Volume 24, pp. 147–154. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef]
- Michael, N.; Zavlanos, M.M.; Kumar, V.; Pappas, G.J. Distributed multi-robot task assignment and formation control. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, IEEE, Pasadena, CA, USA, 19–23 May 2008; pp. 128–133. [Google Scholar]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Wang, X.; Hudack, J.; Mou, S. Distributed Algorithm with Resilience for Multi-Agent Task Allocation. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), IEEE, Victoria, BC, Canada, 10–13 May 2021; pp. 112–117. [Google Scholar]
- Nunes, E.; McIntire, M.; Gini, M. Decentralized multi-robot allocation of tasks with temporal and precedence constraints. Adv. Robot. 2017, 31, 1193–1207. [Google Scholar] [CrossRef]
- Tadewos, T.G.; Shamgah, L.; Karimoddini, A. On-the-fly decentralized tasking of autonomous vehicles. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), IEEE, Nice, France, 11–13 December 2019; pp. 2770–2775. [Google Scholar]
- Kim, K.S.; Kim, H.Y.; Choi, H.L. Minimizing communications in decentralized greedy task allocation. J. Aerosp. Inf. Syst. 2019, 16, 340–345. [Google Scholar] [CrossRef]
- Patel, R.; Rudnick-Cohen, E.; Azarm, S.; Otte, M.; Xu, H.; Herrmann, J.W. Decentralized Task Allocation in Multi-Agent Systems Using a Decentralized Genetic Algorithm. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Paris, France, 31 May–31 August 2020; pp. 3770–3776. [Google Scholar]
- Banks, C.; Wilson, S.; Coogan, S.; Egerstedt, M. Multi-agent task allocation using cross-entropy temporal logic optimization. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Paris, France, 31 May–31 August 2020; pp. 7712–7718. [Google Scholar]
- Henkel, C.; Toussaint, M. Optimized directed roadmap graph for multi-agent path finding using stochastic gradient descent. In Proceedings of the Proceedings of the 35th Annual ACM Symposium on Applied Computing, New York, NY, USA, 30 March–3 April 2020; pp. 776–783. [Google Scholar]
- Prasad, A.; Choi, H.L.; Sundaram, S. Min-Max Tours and Paths for Task Allocation to Heterogeneous Agents. IEEE Trans. Control Netw. Syst. 2020, 7, 1511–1522. [Google Scholar] [CrossRef]
- Park, B.; Kang, C.; Choi, J. Cooperative multi-robot task allocation with reinforcement learning. Appl. Sci. 2021, 12, 272. [Google Scholar] [CrossRef]
- Bakolas, E.; Lee, Y. Decentralized game-theoretic control for dynamic task allocation problems for multi-agent systems. In Proceedings of the 2021 American Control Conference (ACC), IEEE, New Orleans, LA, USA, 25–28 May 2021; pp. 3228–3233. [Google Scholar]
- Martin, J.G.; Muros, F.J.; Maestre, J.M.; Camacho, E.F. Multi-robot task allocation clustering based on game theory. Robot. Auton. Syst. 2023, 161, 104314. [Google Scholar] [CrossRef]
- Bertuccelli, L.; Choi, H.L.; Cho, P.; How, J. Real-time multi-UAV task assignment in dynamic and uncertain environments. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5776. [Google Scholar]
- Choi, H.J.; Kim, Y.D.; Kim, H.J. Genetic algorithm based decentralized task assignment for multiple unmanned aerial vehicles in dynamic environments. Int. J. Aeronaut. Space Sci. 2011, 12, 163–174. [Google Scholar] [CrossRef]
- Henkel, C.; Abbenseth, J.; Toussaint, M. An optimal algorithm to solve the combined task allocation and path finding problem. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Macau, China, 4–8 November 2019; pp. 4140–4146. [Google Scholar]
- Schillinger, P.; Bürger, M.; Dimarogonas, D.V. Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. Int. J. Robot. Res. 2018, 37, 818–838. [Google Scholar] [CrossRef]
- Ren, Z.; Rathinam, S.; Choset, H. MS: A New Exact Algorithm for Multi-agent Simultaneous Multi-goal Sequencing and Path Finding. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Xian, China, 30 May–5 June 2021; pp. 11560–11565. [Google Scholar]
- Lloyd, S. Least squares quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. k-means++: The advantages of careful seeding. In Proceedings of the eighteenth annual ACM-SIAM symposium on Discrete algorithms (SODA), SIAM, Miami, FL, USA, 22–26 January 2006; pp. 1027–1035. [Google Scholar]
- Achterberg, T. SCIP: Solving constraint integer programs. Math. Program. Comput. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Google. OR-Tools. 2010. Available online: https://developers.google.com/optimization (accessed on 25 February 2024).
- Miller, C.E.; Tucker, A.W.; Zemlin, R.A. Integer programming formulation of traveling salesman problems. J. ACM (JACM) 1960, 7, 326–329. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Zhou, T.; Mou, S. Real-Time Multi-Robot Mission Planning in Cluttered Environment. Robotics 2024, 13, 40. https://doi.org/10.3390/robotics13030040
Lu Z, Zhou T, Mou S. Real-Time Multi-Robot Mission Planning in Cluttered Environment. Robotics. 2024; 13(3):40. https://doi.org/10.3390/robotics13030040
Chicago/Turabian StyleLu, Zehui, Tianyu Zhou, and Shaoshuai Mou. 2024. "Real-Time Multi-Robot Mission Planning in Cluttered Environment" Robotics 13, no. 3: 40. https://doi.org/10.3390/robotics13030040
APA StyleLu, Z., Zhou, T., & Mou, S. (2024). Real-Time Multi-Robot Mission Planning in Cluttered Environment. Robotics, 13(3), 40. https://doi.org/10.3390/robotics13030040