


A Control Interface for Autonomous Positioning of Magnetically Actuated Spheres Using an Artificial Neural Network

 ,
,  , , , and
, , , and
Abstract
1. Introduction
2. Methods
2.1. System Model
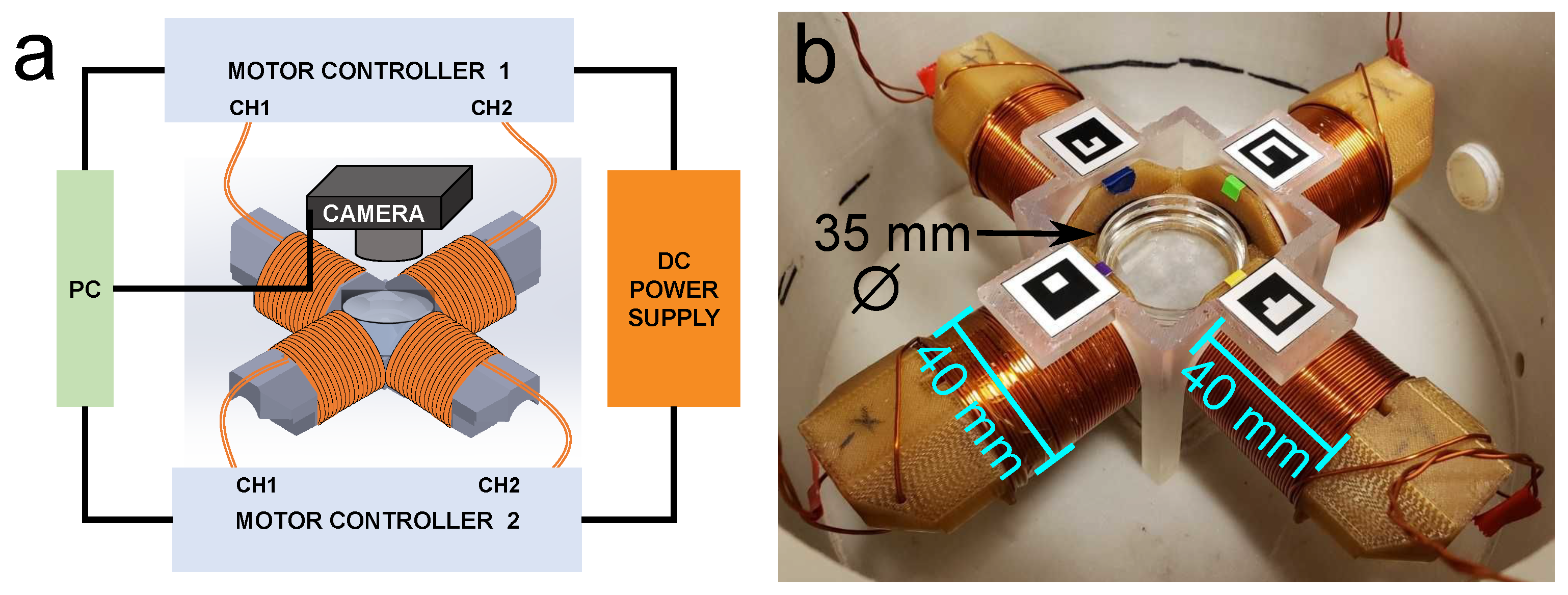
2.2. Experimental Apparatus
2.3. Data Collection
2.3.1. Coil Localization
2.3.2. Magnetic Sphere Localization
2.3.3. Magnetic Sphere Tracking
2.4. Preprocessing
2.5. Development of Two Data-Driven Controllers
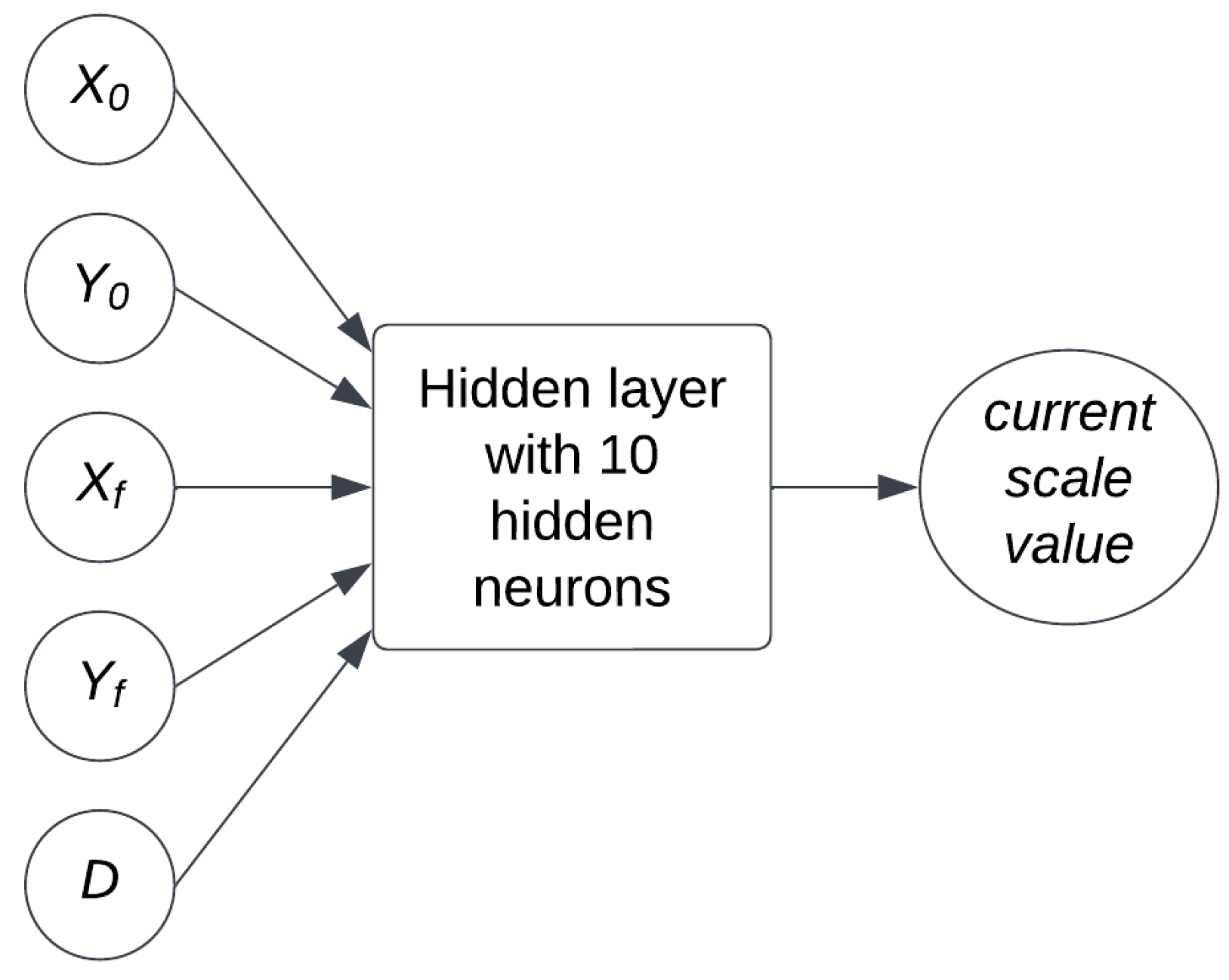
2.5.1. Artificial-Neural-Network-Based Controller
2.5.2. Surface Fitting Model-Based Controller
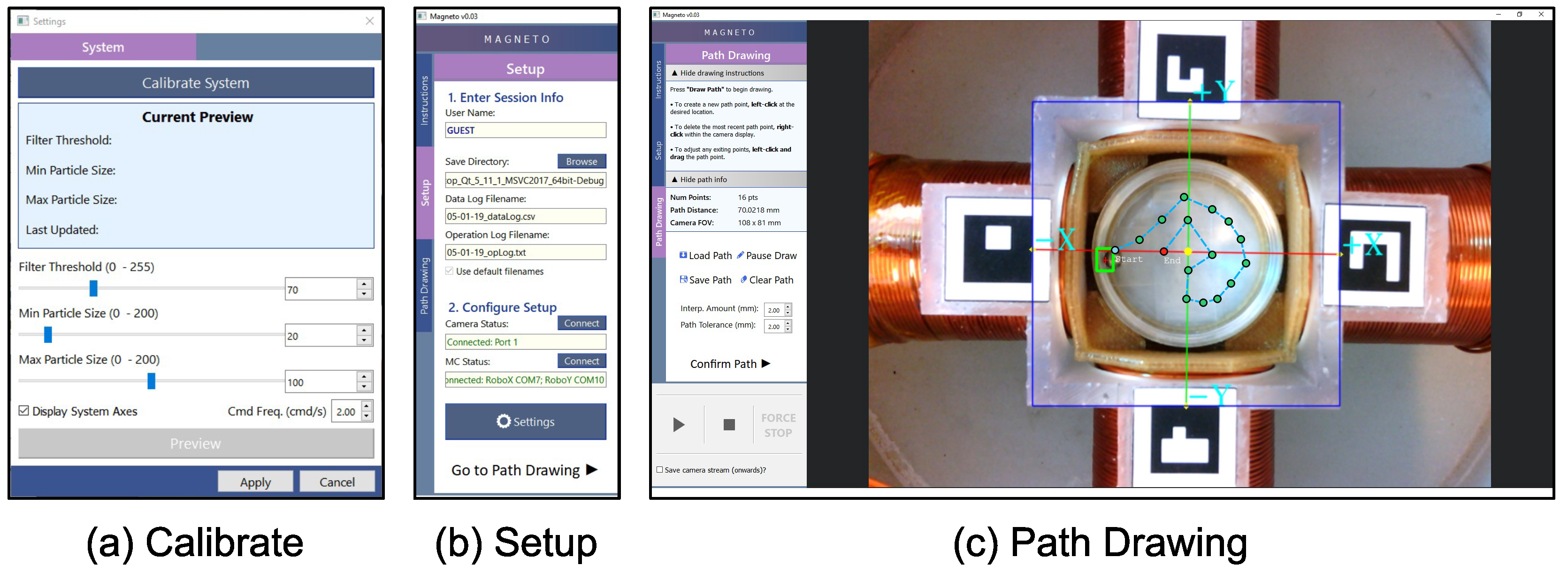
2.6. System Integration and Deployment
3. Results
3.1. Data Collection
3.2. Accuracy Comparison of Predicted Current Scales from Two Models
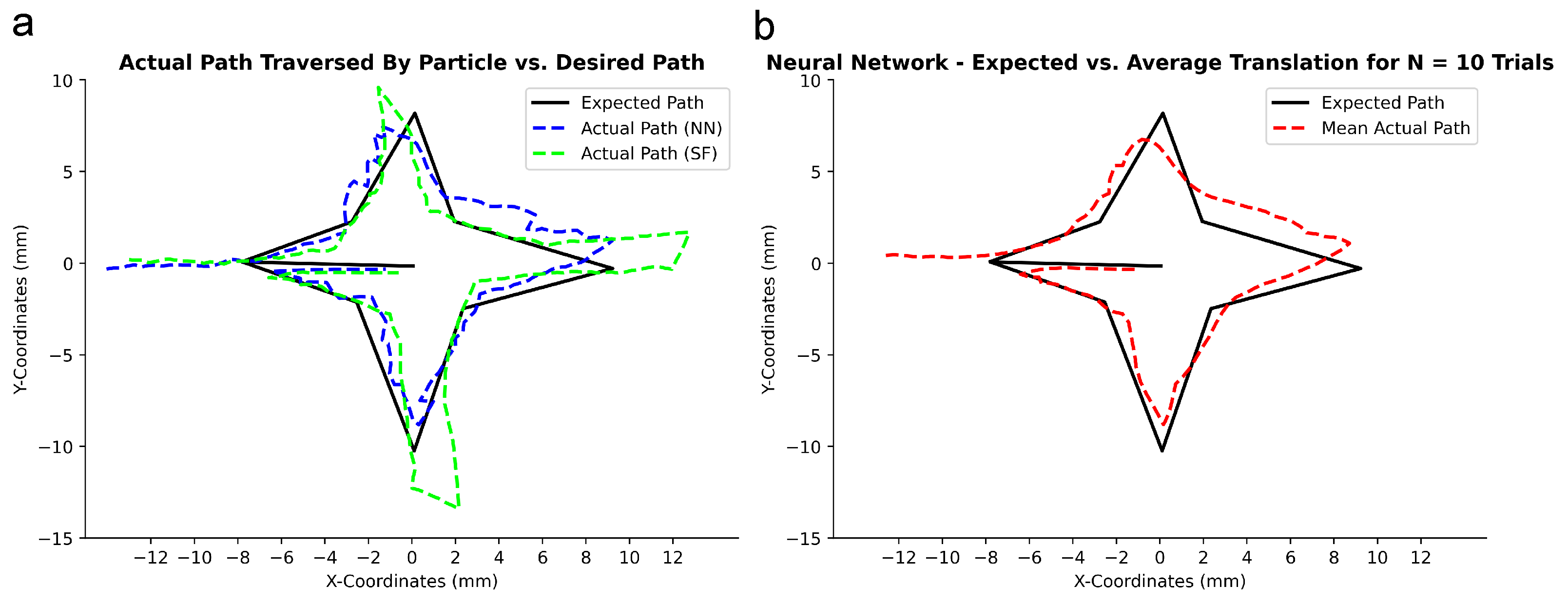
3.3. Comparison of Magnetic Sphere following Trajectories
4. Discussion
4.1. Magnetic Sphere Detection Sensitivity Analysis
4.2. GUI Response Time
5. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Martin, J.W.; Scaglioni, B.; Norton, J.C.; Subramanian, V.; Arezzo, A.; Obstein, K.L.; Valdastri, P. Enabling the future of colonoscopy with intelligent and autonomous magnetic manipulation. Nat. Mach. Intell. 2020, 2, 595–606. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.; Malik, S.; Toyserkani, E.; Khamesee, M.B. Development of an electromagnetic micromanipulator levitation system for metal additive manufacturing applications. Micromachines 2022, 13, 585. [Google Scholar] [CrossRef] [PubMed]
- Cao, Q.; Fan, Q.; Chen, Q.; Liu, C.; Han, X.; Li, L. Recent advances in manipulation of micro-and nano-objects with magnetic fields at small scales. Mater. Horizons 2020, 7, 638–666. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, L. Magnetic actuation systems for miniature robots: A review. Adv. Intell. Syst. 2020, 2, 2000082. [Google Scholar] [CrossRef]
- Chen, X.Z.; Jang, B.; Ahmed, D.; Hu, C.; De Marco, C.; Hoop, M.; Mushtaq, F.; Nelson, B.J.; Pané, S. Small-scale machines driven by external power sources. Adv. Mater. 2018, 30, 1705061. [Google Scholar] [CrossRef] [PubMed]
- Sitti, M.; Ceylan, H.; Hu, W.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical applications of untethered mobile milli/microrobots. Proc. IEEE 2015, 103, 205–224. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic actuation based motion control for microrobots: An overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, L. Motion control in magnetic microrobotics: From individual and multiple robots to swarms. Annu. Rev. Control Robot. Auton. Syst. 2021, 4, 509–534. [Google Scholar] [CrossRef]
- Abbott, J.J.; Diller, E.; Petruska, A.J. Magnetic methods in robotics. Annu. Rev. Control Robot. Auton. Syst. 2020, 3, 57–90. [Google Scholar] [CrossRef]
- Komaee, A.; Shapiro, B. Steering a ferromagnetic particle by optimal magnetic feedback control. IEEE Trans. Control Syst. Technol. 2011, 20, 1011–1024. [Google Scholar] [CrossRef]
- Komaee, A. Feedback control for transportation of magnetic fluids with minimal dispersion: A first step toward targeted magnetic drug delivery. IEEE Trans. Control Syst. Technol. 2016, 25, 129–144. [Google Scholar] [CrossRef]
- Fang, W.Z.; Xiong, T.; Pak, O.S.; Zhu, L. Data-driven intelligent manipulation of particles in microfluidics. Adv. Sci. 2023, 10, 2205382. [Google Scholar] [CrossRef]
- Chapin, S.C.; Germain, V.; Dufresne, E.R. Automated trapping, assembly, and sorting with holographic optical tweezers. Opt. Express 2006, 14, 13095–13100. [Google Scholar] [CrossRef] [PubMed]
- Cohen, A.E. Control of nanoparticles with arbitrary two-dimensional force fields. Phys. Rev. Lett. 2005, 94, 118102. [Google Scholar] [CrossRef]
- Zhou, Q.; Sariola, V.; Latifi, K.; Liimatainen, V. Controlling the motion of multiple objects on a Chladni plate. Nat. Commun. 2016, 7, 12764. [Google Scholar] [CrossRef] [PubMed]
- Probst, R.; Lin, J.; Komaee, A.; Nacev, A.; Cummins, Z.; Shapiro, B. Planar steering of a single ferrofluid drop by optimal minimum power dynamic feedback control of four electromagnets at a distance. J. Magn. Magn. Mater. 2011, 323, 885–896. [Google Scholar] [CrossRef] [PubMed]
- Ongaro, F.; Pane, S.; Scheggi, S.; Misra, S. Design of an electromagnetic setup for independent three-dimensional control of pairs of identical and nonidentical microrobots. IEEE Trans. Robot. 2018, 35, 174–183. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, Y.; An, M.; Sarwar, M.T.; Yang, H. Advances in Finite Element Analysis of External Field-Driven Micro/Nanorobots: A Review. Adv. Intell. Syst. 2023, 5, 2200466. [Google Scholar] [CrossRef]
- Weerasooriya, S.; El-Sharkawi, M.A. Identification and control of a dc motor using back-propagation neural networks. IEEE Trans. Energy Convers. 1991, 6, 663–669. [Google Scholar] [CrossRef]
- Kolo, B.A. Neural Networks in Magnetic Guidance; University of Virginia: Charlottesville, VA, USA, 1998. [Google Scholar]
- Yu, R.; Charreyron, S.L.; Boehler, Q.; Weibel, C.; Chautems, C.; Poon, C.C.; Nelson, B.J. Modeling electromagnetic navigation systems for medical applications using random forests and artificial neural networks. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 9251–9256. [Google Scholar]
- Kazemzadeh Heris, P.; Khamesee, M.B. Design and fabrication of a magnetic actuator for torque and force control estimated by the ann/sa algorithm. Micromachines 2022, 13, 327. [Google Scholar] [CrossRef]
- Tariverdi, A.; Venkiteswaran, V.K.; Richter, M.; Elle, O.J.; Tørresen, J.; Mathiassen, K.; Misra, S.; Martinsen, Ø.G. A recurrent neural-network-based real-time dynamic model for soft continuum manipulators. Front. Robot. AI 2021, 8, 631303. [Google Scholar] [CrossRef]
- Liu, J.; Wu, X.; Huang, C.; Manamanchaiyaporn, L.; Shang, W.; Yan, X.; Xu, T. 3-D autonomous manipulation system of helical microswimmers with online compensation update. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1380–1391. [Google Scholar] [CrossRef]
- Behrens, M.R.; Ruder, W.C. Smart Magnetic Microrobots Learn to Swim with Deep Reinforcement Learning. Adv. Intell. Syst. 2022, 4, 2200023. [Google Scholar] [CrossRef]
- Salehi, M.; Nejat Pishkenari, H.; Zohoor, H. Position control of a wheel-based miniature magnetic robot using neuro-fuzzy network. Robotica 2022, 40, 3895–3910. [Google Scholar] [CrossRef]
- Turan, M.; Ornek, E.P.; Ibrahimli, N.; Giracoglu, C.; Almalioglu, Y.; Yanik, M.F.; Sitti, M. Unsupervised odometry and depth learning for endoscopic capsule robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1801–1807. [Google Scholar]
- Norton, J.C.; Slawinski, P.R.; Lay, H.S.; Martin, J.W.; Cox, B.F.; Cummins, G.; Desmulliez, M.P.; Clutton, R.E.; Obstein, K.L.; Cochran, S.; et al. Intelligent magnetic manipulation for gastrointestinal ultrasound. Sci. Robot. 2019, 4, eaav7725. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, O.F.; Mori, Y.; Misawa, M.; Kudo, S.E.; Anderson, J.T.; Bernal, J.; Berzin, T.M.; Bisschops, R.; Byrne, M.F.; Chen, P.J.; et al. Establishing key research questions for the implementation of artificial intelligence in colonoscopy: A modified Delphi method. Endoscopy 2021, 53, 893–901. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Zhang, P.; Qu, J.; Huang, W.; Liu, X.; Xie, L. Dynamic magnetic field generation with high accuracy modeling applied to magnetic robots. IEEE Trans. Magn. 2021, 57, 1–10. [Google Scholar] [CrossRef]
- Barnoy, Y.; Erin, O.; Raval, S.; Pryor, W.; Mair, L.O.; Weinberg, I.N.; Diaz-Mercado, Y.; Krieger, A.; Hager, G.D. Control of Magnetic Surgical Robots With Model-Based Simulators and Reinforcement Learning. IEEE Trans. Med. Robot. Bionics 2022, 4, 945–956. [Google Scholar] [CrossRef]
- Liu, D. The Application of Machine Learning for Designing and Controlling Electromagnetic Fields. Ph.D. Thesis, University of Wisconsin–Madison, Madison, WI, USA, 2021. [Google Scholar]
- Huang, Z.; Zhu, J.; Shao, J.; Wei, Z.; Tang, J. Recurrent neural network based high-precision position compensation control of magnetic levitation system. Sci. Rep. 2022, 12, 11435. [Google Scholar] [CrossRef]
- Charreyron, S.L.; Boehler, Q.; Kim, B.; Weibel, C.; Chautems, C.; Nelson, B.J. Modeling electromagnetic navigation systems. IEEE Trans. Robot. 2021, 37, 1009–1021. [Google Scholar] [CrossRef]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Deep Learning Toolbox, Version: 9.4 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022.
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis, Proceedings of the Biennial Conference, Dundee, UK, June 28–July 1 1977; Springer: Berlin/Heidelberg, Germany, 2006; pp. 105–116. [Google Scholar]
- Guennebaud, G.; Jacob, B.; Avery, P.; Bachrach, A.; Barthelemy, S.; Becker, C.; Benjamin, D.; Berger, C.; Berres, A.; Blanco, J.L.; et al. Eigen v3. 2010. Available online: http://eigen.tuxfamily.org (accessed on 15 January 2019).
- Galan, E.A.; Zhao, H.; Wang, X.; Dai, Q.; Huck, W.T.; Ma, S. Intelligent microfluidics: The convergence of machine learning and microfluidics in materials science and biomedicine. Matter 2020, 3, 1893–1922. [Google Scholar] [CrossRef]
- Shapiro, B.; Kulkarni, S.; Nacev, A.; Muro, S.; Stepanov, P.Y.; Weinberg, I.N. Open challenges in magnetic drug targeting. Wiley Interdiscip. Rev. Nanomed. Nanobiotechnol. 2015, 7, 446–457. [Google Scholar] [CrossRef] [PubMed]
- Vitol, E.A.; Novosad, V.; Rozhkova, E.A. Microfabricated magnetic structures for future medicine: From sensors to cell actuators. Nanomedicine 2012, 7, 1611–1624. [Google Scholar] [CrossRef] [PubMed]
- Shao, Y.; Fahmy, A.; Li, M.; Li, C.; Zhao, W.; Sienz, J. Study on magnetic control systems of micro-robots. Front. Neurosci. 2021, 15, 736730. [Google Scholar] [CrossRef] [PubMed]
- Hong, A.; Petruska, A.J.; Zemmar, A.; Nelson, B.J. Magnetic control of a flexible needle in neurosurgery. IEEE Trans. Biomed. Eng. 2020, 68, 616–627. [Google Scholar] [CrossRef]
- Kinross, J.M.; Mason, S.E.; Mylonas, G.; Darzi, A. Next-generation robotics in gastrointestinal surgery. Nat. Rev. Gastroenterol. Hepatol. 2020, 17, 430–440. [Google Scholar] [CrossRef] [PubMed]
- Connor, M.J.; Dasgupta, P.; Ahmed, H.U.; Raza, A. Autonomous surgery in the era of robotic urology: Friend or foe of the future surgeon? Nat. Rev. Urol. 2020, 17, 643–649. [Google Scholar] [CrossRef] [PubMed]
- Brablc, M.; Žegklitz, J.; Grepl, R.; Babuška, R. Control of Magnetic Manipulator Using Reinforcement Learning Based on Incrementally Adapted Local Linear Models. Complexity 2021, 2021, 6617309. [Google Scholar] [CrossRef]
- Abbasi, S.A.; Ahmed, A.; Noh, S.; Gharamaleki, N.L.; Kim, S.; Chowdhury, A.M.B.; Kim, J.y.; Pané, S.; Nelson, B.J.; Choi, H. Autonomous 3D positional control of a magnetic microrobot using reinforcement learning. Nat. Mach. Intell. 2024, 6, 92–105. [Google Scholar] [CrossRef]
- Cai, M.; Wang, Q.; Qi, Z.; Jin, D.; Wu, X.; Xu, T.; Zhang, L. Deep Reinforcement Learning Framework-Based Flow Rate Rejection Control of Soft Magnetic Miniature Robots. IEEE Trans. Cybern. 2022, 53, 7699–7711. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trained Coil | Surface Fitting | Artificial Neural Network |
|---|---|---|
| +X | 0.650 | 0.932 |
| −X | 0.729 | 0.882 |
| +Y | 0.735 | 0.887 |
| −Y | 0.827 | 0.934 |
| AVERAGE | 0.735 | 0.910 |
| Function | Average Lag Time (ms) | Standard Deviation (ms) |
|---|---|---|
| Startup | 1287.13 | 16.59 |
| Camera Connection | 987.38 | 182.76 |
| Motor Controller Connection | 10.81 | 0.59 |
| Open Settings Window | 52.38 | 2.11 |
| Apply Settings Window Edits | 0.16 | 0.10 |
| Start/Pause System Operation | 1.98 | 0.56 |
| Stop Hardware Execution | 0.09 | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, V.; Mutawak, B.; Do, M.Q.; Ankrah, E.A.; Kassaeiyan, P.; Weinberg, I.N.; Peixoto, N.; Wei, Q.; Mair, L.O. A Control Interface for Autonomous Positioning of Magnetically Actuated Spheres Using an Artificial Neural Network. Robotics 2024, 13, 39. https://doi.org/10.3390/robotics13030039
Huynh V, Mutawak B, Do MQ, Ankrah EA, Kassaeiyan P, Weinberg IN, Peixoto N, Wei Q, Mair LO. A Control Interface for Autonomous Positioning of Magnetically Actuated Spheres Using an Artificial Neural Network. Robotics. 2024; 13(3):39. https://doi.org/10.3390/robotics13030039
Chicago/Turabian StyleHuynh, Victor, Basam Mutawak, Minh Quan Do, Elizabeth A. Ankrah, Pouya Kassaeiyan, Irving N. Weinberg, Nathalia Peixoto, Qi Wei, and Lamar O. Mair. 2024. "A Control Interface for Autonomous Positioning of Magnetically Actuated Spheres Using an Artificial Neural Network" Robotics 13, no. 3: 39. https://doi.org/10.3390/robotics13030039
APA StyleHuynh, V., Mutawak, B., Do, M. Q., Ankrah, E. A., Kassaeiyan, P., Weinberg, I. N., Peixoto, N., Wei, Q., & Mair, L. O. (2024). A Control Interface for Autonomous Positioning of Magnetically Actuated Spheres Using an Artificial Neural Network. Robotics, 13(3), 39. https://doi.org/10.3390/robotics13030039