
Soft Hand Exoskeletons for Rehabilitation: Approaches to Design, Manufacturing Methods, and Future Prospects


Abstract
:1. Introduction
2. Review Methodology
2.1. Inclusion Criteria
2.1.1. Active Exoskeletons
2.1.2. Softness and Compliance
2.1.3. Wearable Configuration
2.1.4. Rehabilitation Approach
2.1.5. Digital Fabrication Process
2.2. Exclusion Criteria
2.2.1. Prosthetic Devices for Limb Replacement
2.2.2. Hard Mechanical Devices
2.2.3. Passive Hand Rehabilitation Devices
2.2.4. Traditionally Manufactured Devices
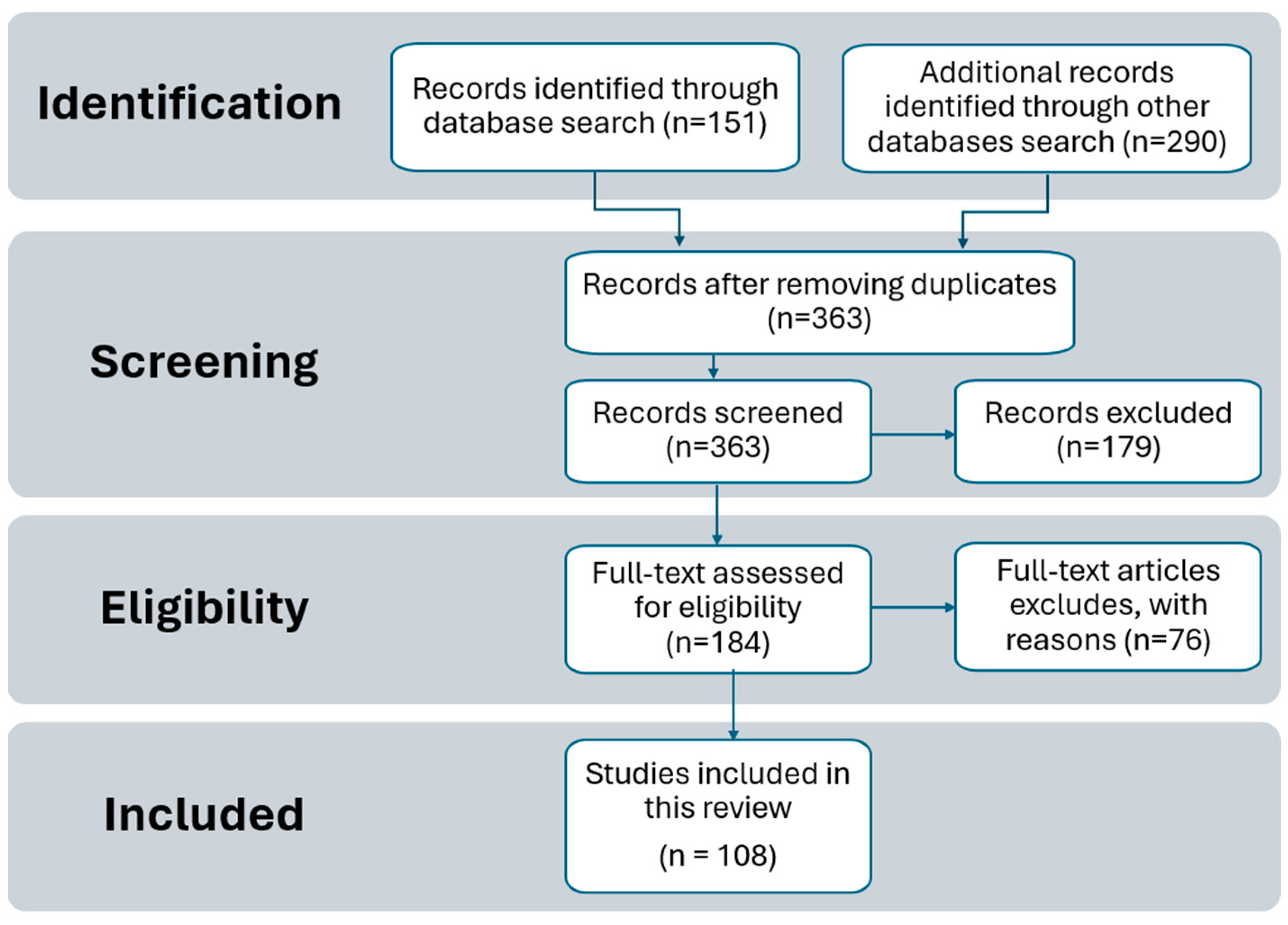
2.3. Article Selection Process
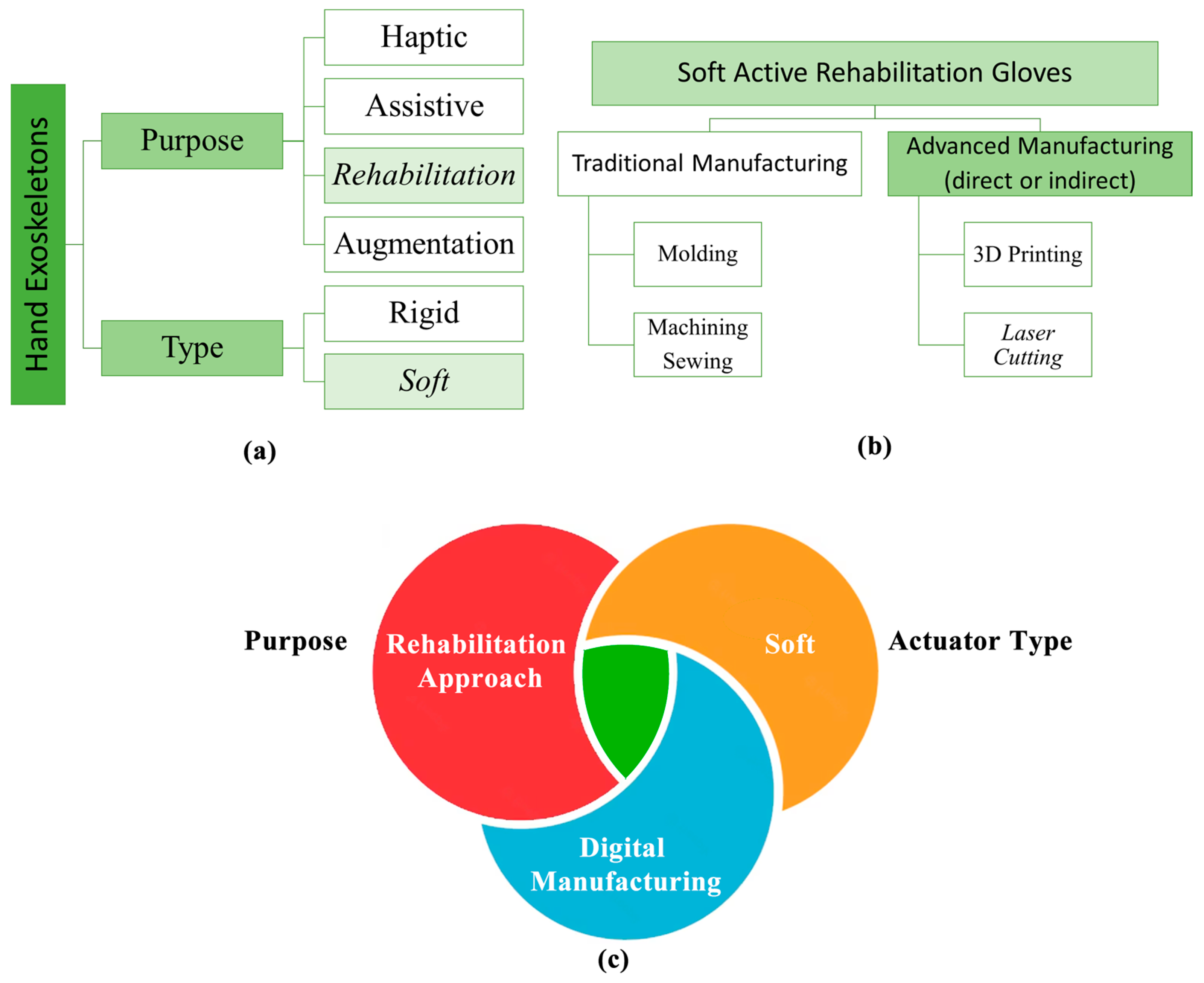
2.4. Framework for Comparison
3. Past Reviews of Soft Hand Exoskeletons
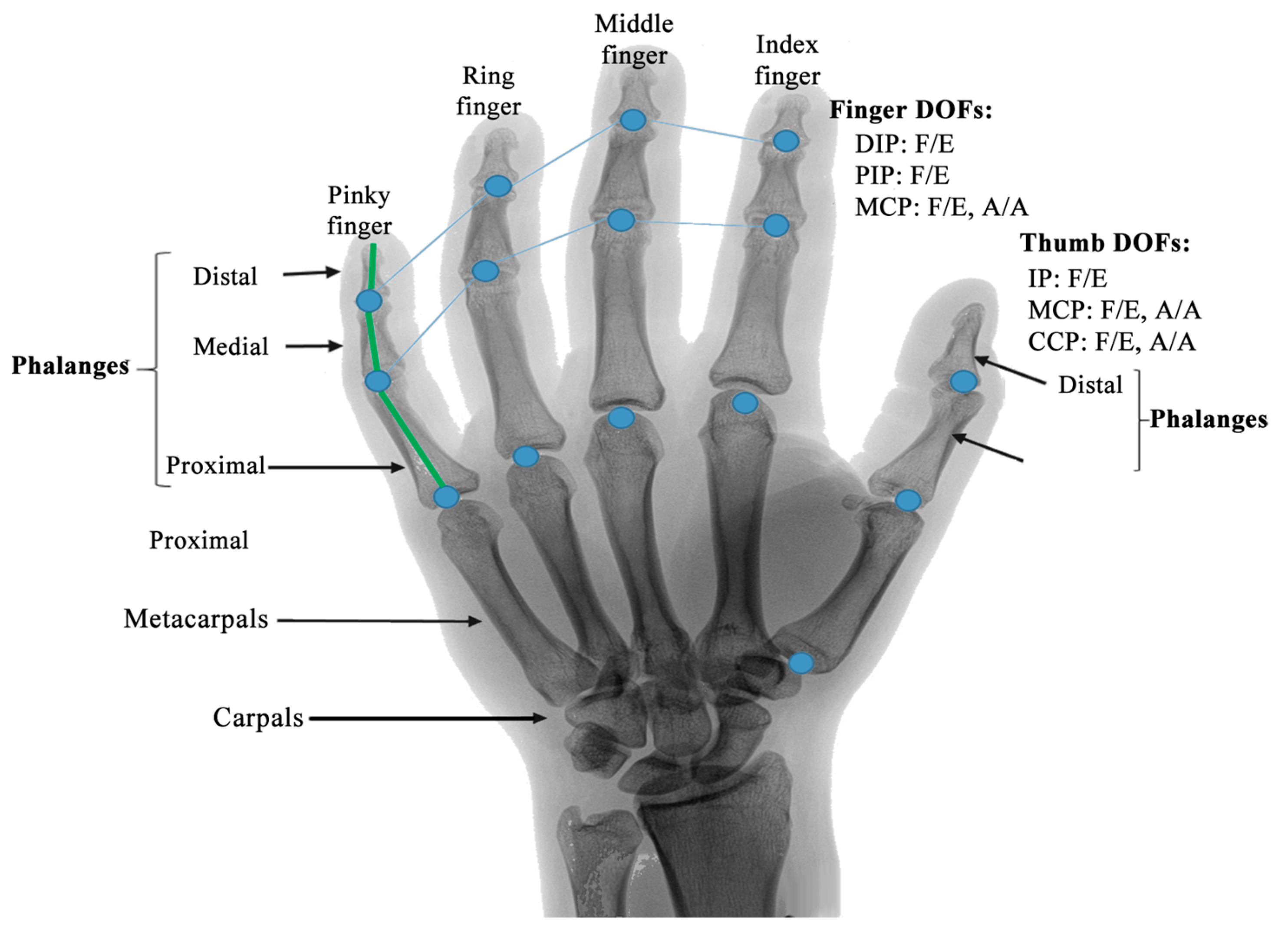
4. Hand Anatomy for Rehabilitation Wearable Devices
4.1. Grip Movements
4.2. Variants of Power Grip
4.3. Precision Grip
5. Design Requirements for Soft Hand Exoskeletons
6. Review of Soft Exoskeleton Gloves
6.1. Based on Fluidic Bladders
6.2. Indirect Digital Manufacturing
6.3. Direct Digital Manufacturing
6.4. Based on Polymer Structural Components
6.5. Fabric or Textile Based
7. FEM-Based Topology Optimization in Shaping Soft Robotic Structures
8. Discussion and Future Work
8.1. Simulation-Supported Methods
8.2. Affordability
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Loo, K.W.; Gan, S.H. Burden of Stroke in Malaysia. Int. J. Stroke 2012, 7, 165–167. [Google Scholar] [CrossRef]
- Kim, J.; Thayabaranathan, T.; Donnan, G.A.; Howard, G.; Howard, V.J.; Rothwell, P.M.; Feigin, V.; Norrving, B.; Owolabi, M.; Pandian, J.; et al. Global Stroke Statistics 2019. Int. J. Stroke 2020, 15, 819–838. [Google Scholar] [CrossRef] [PubMed]
- Roger, V.L.; Go, A.S.; Lloyd-Jones, D.M.; Adams, R.J.; Berry, J.D.; Brown, T.M.; Carnethon, M.R.; Dai, S.; De Simone, G.; Ford, E.S.; et al. Heart Disease and Stroke Statistics—2011 Update: A Report from the American Heart Association. Circulation 2011, 123, e18–e209. [Google Scholar] [CrossRef] [PubMed]
- Bernhardt, J.; Hayward, K.S.; Kwakkel, G.; Ward, N.S.; Wolf, S.L.; Borschmann, K.; Krakauer, J.W.; Boyd, L.A.; Carmichael, S.T.; Corbett, D.; et al. Agreed Definitions and a Shared Vision for New Standards in Stroke Recovery Research: The Stroke Recovery and Rehabilitation Roundtable Taskforce. Neurorehabil Neural Repair. 2017, 31, 793–799. [Google Scholar] [CrossRef] [PubMed]
- Coupland, A.P.; Thapar, A.; Qureshi, M.I.; Jenkins, H.; Davies, A.H. The Definition of Stroke. J. R. Soc. Med. 2017, 110, 9. [Google Scholar] [CrossRef] [PubMed]
- Katan, M.; Luft, A. Global Burden of Stroke. Semin. Neurol. 2018, 38, 208–211. [Google Scholar] [CrossRef]
- Ma, V.Y.; Chan, L.; Carruthers, K.J. The Incidence, Prevalence, Costs and Impact on Disability of Common Conditions Requiring Rehabilitation in the US: Stroke, Spinal Cord Injury, Traumatic Brain Injury, Multiple Sclerosis, Osteoarthritis, Rheumatoid Arthritis, Limb Loss, and Back Pain. Arch. Phys. Med. Rehabil. 2014, 95, 986. [Google Scholar] [CrossRef] [PubMed]
- Boehme, A.K.; Esenwa, C.; Elkind, M.S.V. Stroke Risk Factors, Genetics, and Prevention. Circ. Res. 2017, 120, 472–495. [Google Scholar] [CrossRef]
- Aigner, A.; Grittner, U.; Rolfs, A.; Norrving, B.; Siegerink, B.; Busch, M.A. Contribution of Established Stroke Risk Factors to the Burden of Stroke in Young Adults. Stroke 2017, 48, 1744–1751. [Google Scholar] [CrossRef]
- Donnan, G.A.; Fisher, M.; Macleod, M.; Davis, S.M. Stroke. Lancet 2008, 371, 1612–1623. [Google Scholar] [CrossRef]
- Feigin, V.L.; Forouzanfar, M.H.; Krishnamurthi, R.; Mensah, G.A.; Connor, M.; Bennett, D.A.; Moran, A.E.; Sacco, R.L.; Anderson, L.; Truelsen, T.; et al. Global and Regional Burden of Stroke during 1990–2010: Findings from the Global Burden of Disease Study 2010. Lancet 2014, 383, 245–255. [Google Scholar] [CrossRef]
- Johnson, W.; Onuma, O.; Owolabi, M.; Sachdev, S. Stroke: A Global Response Is Needed. Bull. World Health Organ. 2016, 94, 634A–635A. [Google Scholar] [CrossRef]
- Tong, K.Y.; Ho, S.K.; Pang, P.M.K.; Hu, X.L.; Tam, W.K.; Fung, K.L.; Wei, X.J.; Chen, P.N.; Chen, M. An Intention Driven Hand Functions Task Training Robotic System. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3406–3409. [Google Scholar] [CrossRef]
- Van der Loos, H.F.M.; Reinkensmeyer, D.J.; Guglielmelli, E. Rehabilitation and Health Care Robotics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1685–1728. [Google Scholar] [CrossRef]
- Schweighofer, N.; Choi, Y.; Winstein, C.; Gordon, J. Task-Oriented Rehabilitation Robotics. Am. J. Phys. Med. Rehabil. 2012, 91, S270–S279. [Google Scholar] [CrossRef] [PubMed]
- Jeon, B.J.; Kim, W.H.; Park, E.Y. Effect of Task-Oriented Training for People with Stroke: A Meta-Analysis Focused on Repetitive or Circuit Training. Top. Stroke Rehabil. 2015, 22, 34–43. [Google Scholar] [CrossRef] [PubMed]
- Charles, J.; Gordon, A.M. Development of Hand-Arm Bimanual Intensive Training (HABIT) for Improving Bimanual Coordination in Children with Hemiplegic Cerebral Palsy. Dev. Med. Child Neurol. 2006, 48, 931–936. [Google Scholar] [CrossRef] [PubMed]
- Dimyan, M.A.; Cohen, L.G. Neuroplasticity in the Context of Motor Rehabilitation after Stroke. Nat. Rev. Neurol. 2011, 7, 76–85. [Google Scholar] [CrossRef] [PubMed]
- Schaechter, J.D. Motor Rehabilitation and Brain Plasticity after Hemiparetic Stroke. Prog. Neurobiol. 2004, 73, 61–72. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, C.D.; Der-Yeghiaian, L.; Le, V.; Motiwala, R.R.; Cramer, S.C. Robot-Based Hand Motor Therapy after Stroke. Brain 2008, 131, 425–437. [Google Scholar] [CrossRef]
- Bishop, L.; Gordon, A.M.; Kim, H. Hand Robotic Therapy in Children with Hemiparesis: A Pilot Study. Am. J. Phys. Med. Rehabil. 2017, 96, 1–7. [Google Scholar] [CrossRef]
- Lum, P.S.; Godfrey, S.B.; Brokaw, E.B.; Holley, R.J.; Nichols, D. Robotic Approaches for Rehabilitation of Hand Function after Stroke. Am. J. Phys. Med. Rehabil. 2012, 91, S242–S254. [Google Scholar] [CrossRef]
- Babaiasl, M.; Mahdioun, S.H.; Jaryani, P.; Yazdani, M. A Review of Technological and Clinical Aspects of Robot-Aided Rehabilitation of Upper-Extremity after Stroke. Disabil. Rehabil. Assist. Technol. 2016, 11, 263–280. [Google Scholar] [CrossRef] [PubMed]
- Scott, S.H.; Dukelow, S.P. Potential of Robots as Next-Generation Technology for Clinical Assessment of Neurological Disorders and Upper-Limb Therapy. J. Rehabil. Res. Dev. 2011, 48, 335–354. [Google Scholar] [CrossRef] [PubMed]
- Bayon, C.; Raya, R.; Lara, S.L.; Ramirez, O.; Serrano, I.; Rocon, E. Robotic Therapies for Children with Cerebral Palsy: A Systematic Review. Transl. Biomed. 2016, 7, 44. [Google Scholar] [CrossRef]
- Kwakkel, G.; Van Wegen, E.E.H.; Burridge, J.H.; Winstein, C.J.; van Dokkum, L.E.H.; Alt Murphy, M.; Levin, M.F.; Krakauer, J.W. Standardized Measurement of Quality of Upper Limb Movement after Stroke: Consensus-Based Core Recommendations from the Second Stroke Recovery and Rehabilitation Roundtable. Int. J. Stroke 2019, 14, 783–791. [Google Scholar] [CrossRef] [PubMed]
- Sunderland, A.; Tuke, A. Neuroplasticity, Learning and Recovery after Stroke: A Critical Evaluation of Constraint-Induced Therapy. Neuropsychol. Rehabil. 2005, 15, 81–96. [Google Scholar] [CrossRef]
- Chu, C.Y.; Patterson, R.M. Soft Robotic Devices for Hand Rehabilitation and Assistance: A Narrative Review. J. Neuroeng. Rehabil. 2018, 15, 9. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A Survey on Robotic Devices for Upper Limb Rehabilitation. J. NeuroEngineering Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef]
- Stephenson, A.; Stephens, J. An Exploration of Physiotherapists’ Experiences of Robotic Therapy in Upper Limb Rehabilitation within a Stroke Rehabilitation Centre. Disabil. Rehabil. Assist. Technol. 2018, 13, 245–252. [Google Scholar] [CrossRef]
- Lee, S.W.; Landers, K.A.; Park, H.S. Development of a Biomimetic Hand Exotendon Device (BiomHED) for Restoration of Functional Hand Movement Post-Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 886–898. [Google Scholar] [CrossRef]
- Meng, Q.; Xiang, S.; Yu, H. Soft Robotic Hand Exoskeleton Systems: Review and Challenges Surrounding the Technology; Atlantis Press: Amsterdam, The Netherlands, 2017; pp. 186–190. [Google Scholar] [CrossRef]
- Marshall, D.R.; McGrew, D.A. Creativity and Innovation in Health Care: Opening a Hospital Makerspace. Nurse Lead. 2017, 15, 56–58. [Google Scholar] [CrossRef]
- Halbinger, M.A. The Role of Makerspaces in Supporting Consumer Innovation and Diffusion: An Empirical Analysis. Res. Policy 2018, 47, 2028–2036. [Google Scholar] [CrossRef]
- Svensson, P.O.; Hartmann, R.K. Policies to Promote User Innovation: Makerspaces and Clinician Innovation in Swedish Hospitals. Res. Policy 2018, 47, 277–288. [Google Scholar] [CrossRef]
- Rezvani Ghomi, E.; Khosravi, F.; Neisiany, R.E.; Singh, S.; Ramakrishna, S. Future of Additive Manufacturing in Healthcare. Curr. Opin. Biomed. Eng. 2021, 17, 100255. [Google Scholar] [CrossRef]
- Lakshmi, U.; Hofmann, M.; Valencia, S.; Wilcox, L.; Mankoff, J.; Arriaga, R.I. Point-of-Care Manufacturing. Proc. ACM Hum. Comput. Interact. 2019, 3, 1–23. [Google Scholar] [CrossRef]
- Shahrubudin, N.; Lee, T.C.; Ramlan, R. An Overview on 3D Printing Technology: Technological, Materials, and Applications. Procedia Manuf. 2019, 35, 1286–1296. [Google Scholar] [CrossRef]
- Sandoval-Gonzalez, O.; Jacinto-Villegas, J.; Herrera-Aguilar, I.; Portillo-Rodiguez, O.; Tripicchio, P.; Hernandez-Ramos, M.; Flores-Cuautle, A.; Avizzano, C. Design and Development of a Hand Exoskeleton Robot for Active and Passive Rehabilitation. Int. J. Adv. Robot. Syst. 2016, 13, 66. [Google Scholar] [CrossRef]
- Brokaw, E.B.; Black, I.; Holley, R.J.; Lum, P.S. Hand Spring Operated Movement Enhancer (HandSOME): A Portable, Passive Hand Exoskeleton for Stroke Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 391–399. [Google Scholar] [CrossRef]
- Ates, S.; Haarman, C.J.W.; Stienen, A.H.A. SCRIPT Passive Orthosis: Design of Interactive Hand and Wrist Exoskeleton for Rehabilitation at Home after Stroke. Auton. Robot. 2017, 41, 711–723. [Google Scholar] [CrossRef]
- Iqbal, J.; Baizid, K. Stroke Rehabilitation Using Exoskeleton-Based Robotic Exercisers: Mini Review. Biomed. Res. 2015, 26, 197–201. [Google Scholar]
- Park, S.; Weber, L.; Bishop, L.; Stein, J.; Ciocarlie, M. Design and Development of Effective Transmission Mechanisms on a Tendon Driven Hand Orthosis for Stroke Patients. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2281–2287. [Google Scholar] [CrossRef]
- Gasser, B.W.; Goldfarb, M. Design and Performance Characterization of a Hand Orthosis Prototype to Aid Activities of Daily Living in a Post-Stroke Population. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 3877–3880. [Google Scholar] [CrossRef]
- She, Y.; Li, C.; Cleary, J.; Su, H.J. Design and Fabrication of a Soft Robotic Hand with Embedded Actuators and Sensors. J. Mech. Robot. 2015, 7, 021007. [Google Scholar] [CrossRef]
- Kubota, S.; Nakata, Y.; Eguchi, K.; Kawamoto, H.; Kamibayashi, K.; Sakane, M.; Sankai, Y.; Ochiai, N. Feasibility of Rehabilitation Training with a Newly Developed Wearable Robot for Patients with Limited Mobility. Arch. Phys. Med. Rehabil. 2013, 94, 1080–1087. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y.; Li, Y.; Chen, M.Z.Q.; Wei, Y. Bioinspired Robotic Fingers Based on Pneumatic Actuator and 3D Printing of Smart Material. Soft Robot. 2017, 4, 147–162. [Google Scholar] [CrossRef]
- King, J.P.; Bauer, D.; Schlagenhauf, C.; Chang, K.H.; Moro, D.; Pollard, N.; Coros, S. Design, Fabrication, and Evaluation of Tendon-Driven Multi-Fingered Foam Hands. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 540–545. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M. Oft Robotics: New Perspectives for Robot Bodyware and Control. Front. Bioeng. Biotechnol. 2014, 2, 64222. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical Applications of Soft Robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Rossiter, J.; Hauser, H. Soft Robotics—The next Industrial Revolution? IEEE Robot. Autom. Mag. 2016, 23, 17–20. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimböck, T.; Wolf, S.; Hirzinger, G. Soft Robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Wang, L.; Nurzaman, S.G.; Iida, F. Soft-Material Robotics. Found. Trends Robot. 2017, 5, 191–259. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef]
- Schmitt, S.; Haeufle, D. Mechanics and Thermodynamics of Biological Muscle-a Simple Model Approach. Soft Robot. Transf. Theory Appl. 2015, 10, 133–144. [Google Scholar] [CrossRef]
- Lambercy, O.; Ranzani, R.; Gassert, R. Robot-Assisted Rehabilitation of Hand Function. In Rehabilitation Robotics; Academic Press: Cambridge, MA, USA, 2018; pp. 205–225. [Google Scholar] [CrossRef]
- Toya, K.; Miyagawa, T.; Kubota, Y. Power-Assist Glove Operated by Predicting the Grasping Mode. J. Syst. Des. Dyn. 2011, 5, 94–108. [Google Scholar] [CrossRef]
- Molteni, F.; Gasperini, G.; Cannaviello, G.; Guanziroli, E. Exoskeleton and End-Effector Robots for Upper and Lower Limbs Rehabilitation: Narrative Review. PM&R. 2018, 10, S174–S188. [Google Scholar] [CrossRef]
- Mazzoleni, S.; Battini, E.; Crecchi, R.; Dario, P.; Posteraro, F. Upper Limb Robot-Assisted Therapy in Subacute and Chronic Stroke Patients Using an Innovative End-Effector Haptic Device: A Pilot Study. NeuroRehabilitation 2018, 42, 43–52. [Google Scholar] [CrossRef] [PubMed]
- Bikas, H.; Stavropoulos, P.; Chryssolouris, G. Additive Manufacturing Methods and Modeling Approaches: A Critical Review. Int. J. Adv. Manuf. Technol. 2016, 83, 389–405. [Google Scholar] [CrossRef]
- Colorado, H.A.; Gutierrez-Velasquez, E.I.; Gil, L.D.; de Camargo, I.L. Exploring the Advantages and Applications of Nanocomposites Produced via Vat Photopolymerization in Additive Manufacturing: A Review. Adv. Compos. Hybrid. Mater. 2023, 7, 1. [Google Scholar] [CrossRef]
- Colorado, H.A.; Cardenas, C.A.; Gutierrez-Velazquez, E.I.; Escobedo, J.P.; Neves Monteiro, S. Additive Manufacturing in Armor and Military Applications: Research, Materials, Processing Technologies, Perspectives, and Challenges. J. Mater. Res. Technol. 2023, 27, 3900–3913. [Google Scholar] [CrossRef]
- Colorado, H.A.; Mendoza, D.E.; Valencia, F.L. A Combined Strategy of Additive Manufacturing to Support Multidisciplinary Education in Arts, Biology, and Engineering. J. Sci. Educ. Technol. 2021, 30, 58–73. [Google Scholar] [CrossRef]
- Vergara, L.A.; Colorado, H.A. Additive Manufacturing of Portland Cement Pastes with Additions of Kaolin, Superplastificant and Calcium Carbonate. Constr. Build. Mater. 2020, 248, 118669. [Google Scholar] [CrossRef]
- Herzog, D.; Seyda, V.; Wycisk, E.; Emmelmann, C. Additive Manufacturing of Metals. Acta Mater. 2016, 117, 371–392. [Google Scholar] [CrossRef]
- Travitzky, N.; Bonet, A.; Dermeik, B.; Fey, T.; Filbert-Demut, I.; Schlier, L.; Schlordt, T.; Greil, P. Additive Manufacturing of Ceramic-Based Materials. Adv. Eng. Mater. 2014, 16, 729–754. [Google Scholar] [CrossRef]
- Kwon, J.; Park, J.H.; Ku, S.; Jeong, Y.H.; Paik, N.J.; Park, Y.L. A Soft Wearable Robotic Ankle-Foot-Orthosis for Post-Stroke Patients. IEEE Robot. Autom. Lett. 2019, 4, 2547–2552. [Google Scholar] [CrossRef]
- Zhang, N.; Ge, L.; Xu, H.; Zhu, X.; Gu, G. 3D Printed, Modularized Rigid-Flexible Integrated Soft Finger Actuators for Anthropomorphic Hands. Sens. Actuators A Phys. 2020, 312, 112090. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Moghadam, A.A.A.; Gibson, I.; Kaynak, A. Evolution of 3D Printed Soft Actuators. Sens. Actuators A Phys. 2016, 250, 258–272. [Google Scholar] [CrossRef]
- Gu, Y.; Xu, Y.; Shen, Y.; Huang, H.; Liu, T.; Jin, L.; Ren, H.; Wang, J.A.; Gu, Y.; Xu, Y.; et al. A Review of Hand Function Rehabilitation Systems Based on Hand Motion Recognition Devices and Artificial Intelligence. Brain Sci. 2022, 12, 1079. [Google Scholar] [CrossRef]
- Birouaș, F.; Avram, F.; Nilgesz, A.; Mihalca, V.O. A Review Regarding Hand Exoskeleton Technologies for Rehabilitation. Recent. Innov. Mechatron. 2018, 5, 1–5. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed]
- Varghese, R.J.; Freer, D.; Deligianni, F.; Liu, J.; Yang, G.Z. Wearable Robotics for Upper-Limb Rehabilitation and Assistance. Wearable Technology in Medicine and Health Care; Elsevier: Amsterdam, The Netherlands, 2018; pp. 23–69. [Google Scholar] [CrossRef]
- Hayashi, H.; Shimizu, H.; Okumura, S.; Miwa, K. Necessary Metacarpophalangeal Joints Range of Motion to Maintain Hand Function. Hong Kong J. Occup. Ther. 2014, 24, 51–55. [Google Scholar] [CrossRef]
- Hume, M.C.; Gellman, H.; McKellop, H.; Brumfield, R.H. Functional Range of Motion of the Joints of the Hand. J. Hand Surg. Am. 1990, 15, 240–243. [Google Scholar] [CrossRef]
- Hellerhoff, B. File: Handskelett.Png—Wikimedia Commons. Available online: https://commons.wikimedia.org/wiki/File:Handskelett.png#filelinks (accessed on 13 February 2022).
- Wheatland, N.; Wang, Y.; Song, H.; Neff, M.; Zordan, V.; Jörg, S. State of the Art in Hand and Finger Modeling and Animation. Comput. Graph. Forum 2015, 34, 735–760. [Google Scholar] [CrossRef]
- Dollar, A.M. Classifying Human Hand Use and the Activities of Daily Living. In The Human Hand as an Inspiration for Robot Hand Development; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans. Hum. Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Kozin, S.H.; Porter, S.; Clark, P.; Thoder, J.J. The Contribution of the Intrinsic Muscles to Grip and Pinch Strength. J. Hand Surg. Am. 1999, 24, 64–72. [Google Scholar] [CrossRef]
- Zanotto, D.; Akiyama, Y.; Stegall, P.; Agrawal, S.K. Knee Joint Misalignment in Exoskeletons for the Lower Ex-tremities: Effects on User’s Gait. IEEE Transactions on Robotics 2015, 31, 978–987. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft Robotic Glove for Combined Assistance and At-Home Rehabilitation. Rob. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Maeder-York, P.; Clites, T.; Boggs, E.; Neff, R.; Polygerinos, P.; Holland, D.; Stirling, L.; Galloway, K.; Wee, C.; Walsh, C. Biologically Inspired Soft Robot for Thumb Rehabilitation. J. Med. Devices Trans. ASME 2014, 8, 020933. [Google Scholar] [CrossRef]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a Soft Pneumatic Glove for Hand Rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 3–8 November 2013; pp. 1512–1517. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Goh, J.C.H.; Yeow, R.C.H. A Soft Exoskeleton for Hand Assistive and Rehabilitation Application Using Pneumatic Actuators with Variable Stiffness. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Colmar, France, 21–23 July 2015; pp. 4967–4972. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, D.; Liu, P.; Jiao, X.; Ping, Z.; Xu, Z.; Li, J.; Xu, Y. Fishbone-Inspired Soft Robotic Glove for Hand Rehabilitation with Multi-Degrees-of-Freedom. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 394–399. [Google Scholar] [CrossRef]
- Hong, T.H.; Park, S.H.; Park, J.H.; Paik, N.J.; Park, Y.L. Design of Pneumatic Origami Muscle Actuators (POMAs) for A Soft Robotic Hand Orthosis for Grasping Assistance. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 627–632. [Google Scholar] [CrossRef]
- Ang, B.W.K.; Yeow, C.H. Print-It-Yourself (PIY) Glove: A Fully 3D Printed Soft Robotic Hand Rehabilitative and Assistive Exoskeleton for Stroke Patients. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24 September 2017; pp. 1219–1223. [Google Scholar] [CrossRef]
- Li, M.; Zhuo, Y.; He, B.; Liang, Z.; Xu, G.; Xie, J.; Zhang, S. A 3D-Printed Soft Hand Exoskeleton with Finger Abduction Assistance. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 319–322. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tang, Z.Q.; Ho, L.; Tung, M.; Li, Z.; Tong, R.K.Y. Design of a 3D Printed Soft Robotic Hand for Stroke Rehabilitation and Daily Activities Assistance. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 65–70. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tong, R.K.Y.; Lau, A.T.H.; Li, Z. Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. Soft Robot. 2019, 6, 289–304. [Google Scholar] [CrossRef]
- Kang, B.B.; Lee, H.; In, H.; Jeong, U.; Chung, J.; Cho, K.J. Development of a Polymer-Based Tendon-Driven Wearable Robotic Hand. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3750–3755. [Google Scholar] [CrossRef]
- Lee, H.; Kang, B.B.; In, H.; Cho, K.J. Design Improvement of a Polymer-Based Tendon-Driven Wearable Robotic Hand (Exo-Glove Poly). Biosyst. Biorobotics 2017, 16, 95–99. [Google Scholar] [CrossRef]
- Kang, B.B.; Choi, H.; Lee, H.; Cho, K.J. Exo-Glove Poly II: A Polymer-Based Soft Wearable Robot for the Hand with a Tendon-Driven Actuation System. Soft Robot. 2019, 6, 214–227. [Google Scholar] [CrossRef]
- Setiawan, J.D.; Ariyanto, M.; Nugroho, S.; Munadi, M.; Ismail, R.; Setiawan, J.D.; Ariyanto, M.; Nugroho, S.; Munadi, M.; Ismail, R. A Soft Exoskeleton Glove Incorporating Motor-Tendon Actuator for Hand Movements Assistance. Int. Rev. Autom. Control (IREACO) 2020, 13, 1–11. [Google Scholar] [CrossRef]
- Yoo, H.J.; Lee, S.; Kim, J.; Park, C.; Lee, B. Development of 3D-Printed Myoelectric Hand Orthosis for Patients with Spinal Cord Injury. J. Neuroeng. Rehabil. 2019, 16, 162. [Google Scholar] [CrossRef] [PubMed]
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. Flexo-Glove: A 3D Printed Soft Exoskeleton Robotic Glove for Impaired Hand Rehabilitation and Assistance. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 2120–2123. [Google Scholar] [CrossRef]
- Guo, J.; Yu, S.; Li, Y.; Huang, T.H.; Wang, J.; Lynn, B.; Fidock, J.; Shen, C.L.; Edwards, D.; Su, H. A Soft Robotic Exo-Sheath Using Fabric EMG Sensing for Hand Rehabilitation and Assistance. In Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 497–503. [Google Scholar] [CrossRef]
- Yi, J.; Shen, Z.; Song, C.; Wang, Z. A Soft Robotic Glove for Hand Motion Assistance. In Proceedings of the 2016 IEEE International Conference on Real-time Computing and Robotics (RCAR), Angkor Wat, Cambodia, 6–10 June 2016; pp. 111–116. [Google Scholar] [CrossRef]
- Rudd, G.; Daly, L.; Jovanovic, V.; Cuckov, F. A Low-Cost Soft Robotic Hand Exoskeleton for Use in Therapy of Limited Hand–Motor Function. Appl. Sci. 2019, 9, 3751. [Google Scholar] [CrossRef]
- Popov, D.; Gaponov, I.; Ryu, J.H. Portable Exoskeleton Glove with Soft Structure for Hand Assistance in Activities of Daily Living. IEEE/ASME Trans. Mechatron. 2017, 22, 865–875. [Google Scholar] [CrossRef]
- Biggar, S.; Yao, W. Design and Evaluation of a Soft and Wearable Robotic Glove for Hand Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1071–1080. [Google Scholar] [CrossRef] [PubMed]
- Ribas Neto, A.; Del Porto, M.; Fajardo, J.; Ferman, V.; Rohmer, E. A Wearable Underactuated Robotic Glove Driven by Myoelectric Control Input; Simpósio Brasileiro de Automação Inteligente: Minas Gerais, MG, Brasil, 2019. [Google Scholar] [CrossRef]
- Burns, M.K.; Vinjamuri, R. Design of a Soft Glove-Based Robotic Hand Exoskeleton with Embedded Synergies. In Advances in Motor Neuroprostheses; Springer: Berlin/Heidelberg, Germany, 2020; pp. 71–87. [Google Scholar] [CrossRef]
- Araujo, R.S.; Silva, C.R.; Netto, S.P.N.; Morya, E.; Brasil, F.L. Development of a Low-Cost EEG-Controlled Hand Exoskeleton 3D Printed on Textiles. Front. Neurosci. 2021, 15, 661569. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.H.; Zhang, W. Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Sci. Rep. 2020, 10, 9638. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Liu, Y.; Pancheri, F.; Lueth, T.C. LARG: A Lightweight Robotic Gripper With 3-D Topology Optimized Adaptive Fingers. IEEE/ASME Trans. Mechatron. 2022, 27, 2026–2034. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, Y.; Wang, X.; Wang, C.; Liu, F.; Bai, W.; Wang, L. A Highly Adaptable Flexible Soft Glove Consisting of Multimode Deformable Soft Finger. J. Bionic Eng. 2023, 20, 1555–1568. [Google Scholar] [CrossRef]
- Lai, J.; Song, A.; Wang, J.; Lu, Y.; Wu, T.; Li, H.; Xu, B.; Wei, X. A Novel Soft Glove Utilizing Honeycomb Pneumatic Actuators (HPAs) for Assisting Activities of Daily Living. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3223–3233. [Google Scholar] [CrossRef]
- Wang, B.; McDaid, A.; Aw, K.C.; Biglari-Abhari, M. Design and Development of a Skinny Bidirectional Soft Glove for Post-Stroke Hand Rehabilitation. In Proceedings of the 2017 Intelligent Systems Conference (IntelliSys), London, UK, 7–8 September 2017; pp. 979–987. [Google Scholar] [CrossRef]
- Zhu, Y.; Gong, W.; Chu, K.; Wang, X.; Hu, Z.; Su, H. A Novel Wearable Soft Glove for Hand Rehabilitation and Assistive Grasping. Sensors 2022, 22, 6294. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, D.; Que, J.; Liu, Z.; Wang, Z.; Xu, Y. Soft Robotic Glove for Hand Rehabilitation Based on a Novel Fabrication Method. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau SAR, China, 5–8 December 2017; pp. 817–822. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Fei, Y. Design and Testing of a Soft Rehabilitation Glove Integrating Finger and Wrist Function. J. Mech. Robot. 2019, 11, 011015. [Google Scholar] [CrossRef]
- Lai, J.; Song, A.; Shi, K.; Ji, Q.; Lu, Y.; Li, H. Design and Evaluation of a Bidirectional Soft Glove for Hand Rehabilitation-Assistance Tasks. IEEE Trans. Med. Robot. Bionics 2023, 5, 730–740. [Google Scholar] [CrossRef]
- Dragusanu, M.; Troisi, D.; Suthar, B.; Hussain, I.; Prattichizzo, D.; Malvezzi, M. MGlove-TS: A Modular Soft Glove Based on Twisted String Actuators and Flexible Structures. Mechatronics 2024, 98, 103141. [Google Scholar] [CrossRef]
- Kumar, A.; Chhabra, D. Adopting Additive Manufacturing as a Cleaner Fabrication Framework for Topologically Optimized Orthotic Devices: Implications over Sustainable Rehabilitation. Clean. Eng. Technol. 2022, 10, 100559. [Google Scholar] [CrossRef]
- Bianchi, M.; Cempini, M.; Conti, R.; Meli, E.; Ridolfi, A.; Vitiello, N.; Allotta, B. Design of a Series Elastic Transmission for Hand Exoskeletons. Mechatronics 2018, 51, 8–18. [Google Scholar] [CrossRef]
- Faller, L.-M.; Varsavas, S.D.; Ali, A.M.J.; Michalec, P.; Gidugu, S.L.; Spintzyk, S.; Riemelmoser, F.O. ILEAD—Intelligent Lightweight Functional and Hybrid 3D-Printing for Medical Assistive Devices: Current Status Focusing on the Multi-Material Aspect. Mater. Today Proc. 2022, 70, 512–518. [Google Scholar] [CrossRef]
- Gnanasagaran, C.L.; Ramachandran, K.; Jamadon, N.H.; Kumar, V.H.; Muchtar, A.; Pazhani, A.; Ayaz, B. Microstructural and Mechanical Behaviours of Y-TZP Prepared via Slip-Casting and Fused Deposition Modelling (FDM). Heliyon 2023, 9, e21705. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint Name | Acronym | ROM | DOF |
|---|---|---|---|
| Carpometacarpal | CMC | 1.5° | F/E (Flexion/Extension), A/A (Abduction/Adduction) |
| Metacarpophalangeal | MCP | 90° | F/E, A/A |
| Proximal interphalangeal | PIP | [30–45°] | F/E |
| Distal interphalangeal | DIP | [10–20°] | F/E |
| Design Requirement | Description |
|---|---|
| Security | Ensuring patient safety is paramount for both actuators and their motion control systems. This involves aligning with the anatomical movements of the fingers and their respective joints. It is crucial to confirm that the actuators exert force within the natural limits of the joints. |
| Bidirectionality | The actuators of the device should apply force to the patient’s fingers in a natural manner, avoiding any discomfort. |
| Effective force transmission | The actuators of the device should apply force to the patient’s fingers naturally, ensuring comfort and avoiding discomfort. |
| High power-to-weight ratio | The system needs to be both lightweight and compact, all while maintaining the capacity to generate the necessary force and speed typical of gripping motions. |
| Affordability | Soft robotic rehabilitation gloves, in general, should be the outcome of a relatively uncomplicated manufacturing process. Additionally, they ought to be user-friendly, easy to maintain, and operable by individuals lacking technical expertise. |
| Description | Type of Actuator | Ref. |
|---|---|---|
| Fiber-reinforced soft actuators composed of elastomer and featuring bendable structures inflated by air pressure. Modular and adaptable to various finger sizes and joint stiffness. | Pneumatic | [107] |
| Flexible thermoplastic polyurethane actuators with a honeycomb-like structure enabling bending and folding movements. | Pneumatic | [108] |
| Bi-directional bending actuators made of soft elastomer with embedded air chambers for lightweight, flexible, and anthropomorphic design. | Pneumatic | [109] |
| Combination of bending and rotating actuators made of soft materials like silicone and fabric, with embedded strain and force sensors. | Pneumatic | [110] |
| Actuators fabricated by heat bonding flexible plastic sheets, inflating upon pressurization to extend fingers, embedded in glove pockets. | Pneumatic | [111] |
| Soft pneumatic bending actuators made of molded elastomeric bladders with fiber reinforcements provide finger and wrist motion assistance. | Pneumatic | [112] |
| Hybrid actuators combining silicone flexion actuators and shape memory alloy extension actuators for flexion and extension assistance. | Hybrid pneumatic-magnetic | [113] |
| Modular glove utilizing twisted string actuators (TSAs) for lightweight, flexible motion generation through twisting tendons. | Twisted string | [114] |
| Soft segmented fiber-reinforced actuators with anisotropic fiber reinforcements enable specific bending, twisting, and extending trajectories. | Segmented fiber-reinforced | [115] |
| Soft-elastic composite actuators (SECAs) combine elastomer bladder, fiber wrapping, and torque-compensating layer for finger flexion and extension. | Elastic composite | [90] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saldarriaga, A.; Gutierrez-Velasquez, E.I.; Colorado, H.A. Soft Hand Exoskeletons for Rehabilitation: Approaches to Design, Manufacturing Methods, and Future Prospects. Robotics 2024, 13, 50. https://doi.org/10.3390/robotics13030050
Saldarriaga A, Gutierrez-Velasquez EI, Colorado HA. Soft Hand Exoskeletons for Rehabilitation: Approaches to Design, Manufacturing Methods, and Future Prospects. Robotics. 2024; 13(3):50. https://doi.org/10.3390/robotics13030050
Chicago/Turabian StyleSaldarriaga, Alexander, Elkin Iván Gutierrez-Velasquez, and Henry A. Colorado. 2024. "Soft Hand Exoskeletons for Rehabilitation: Approaches to Design, Manufacturing Methods, and Future Prospects" Robotics 13, no. 3: 50. https://doi.org/10.3390/robotics13030050
APA StyleSaldarriaga, A., Gutierrez-Velasquez, E. I., & Colorado, H. A. (2024). Soft Hand Exoskeletons for Rehabilitation: Approaches to Design, Manufacturing Methods, and Future Prospects. Robotics, 13(3), 50. https://doi.org/10.3390/robotics13030050