
A Reconfigurable UGV for Modular and Flexible Inspection Tasks in Nuclear Sites


Abstract
1. Introduction
2. System Description
2.1. Application
2.2. UGV
- Use off-the-shelf components: Previous experience with the RIANA robot showed that the engineering requirements for customizing a robot for the nuclear environment represent a major driver of costs and delivery times. Because the main objective in this project was the integration of multiple sensors, the UGV, and the DT into a single platform, hardware adaptations to the nuclear environment (e.g., air filtering, avoiding certain materials, shapes minimizing contamination risk, etc.) were not deemed a requirement. Thus, the base platform should be a single commercial platform that fulfills the functional requirements as closely as possible while requiring only minor modifications, such as adding new sensors or providing additional power supplies and connectivity.
- Indoor–outdoor operation: Due to the wide variety of potential environments for application, the UGV should be able to operate both outdoors and indoors as well as in GPS-denied environments.
- Rough terrain operation: At least one of the potential use cases implies navigation in outdoor, unpaved, and uneven terrain. In indoor environments, the platform may need to overcome small obstacles or trenches. Thus, it should be able to operate in rough terrain and should ideally possess off-road capabilities.
- Autonomous and teleoperated: The UGV should have the capacity for either manually teleoperated (first-time exploration, manual control on difficult-to-reach spots, etc.) or fully autonomous operation (routine inspections, exploration beyond communications range, etc.).
- Modular configuration: The UGV must mount a variety of sensors in different configurations. Thus, it should be able to engage in:
- -
- Arm and arm-less operation: Certain sensors are required to be mounted on a robotic arm to ensure that they can be placed close to the radioactive source. However, the arm takes up a lot of space, which could hinder the available space for other sensor configurations. Thus, the arm should be easily detachable, and the robot be able to operate both with and without the arm without requiring complex configuration changes.
- -
- Electrical and communication interfaces: The UGV should provide sufficient varied interfaces for different sensors, including their mounting, power, and communications.
- -
- Help with data management: The UGV should be able to relay all the sensor data to the DT, allow sensors to be managed remotely, retain data in case of communications fault, and ensure that all of the sensors are synchronized.
2.2.1. Platform
- Additional sensor suite: 2D LiDAR, 3D LiDAR, GPS, and IMU.
- Flexible 3D LiDAR mounting, allowing elevation or tilting of the 3D LiDAR to cope with the occlusions caused by the different elements that could be mounted (arm, sensor electronics boxes).
- Additional wireless communications hardware.
- Additional DC power supplies for 5, 12, 24, and 48 V and PoE, with external IP54 connection ports.
- Additional external RJ-45 and USB ports with IP54 protection.
- Top mounting plate with threaded holes for easy module installation.
- Removed some holes and structural elements prone to accumulating dust.
- Removable anchor points for lifting.
2.2.2. Autonomous Capabilities
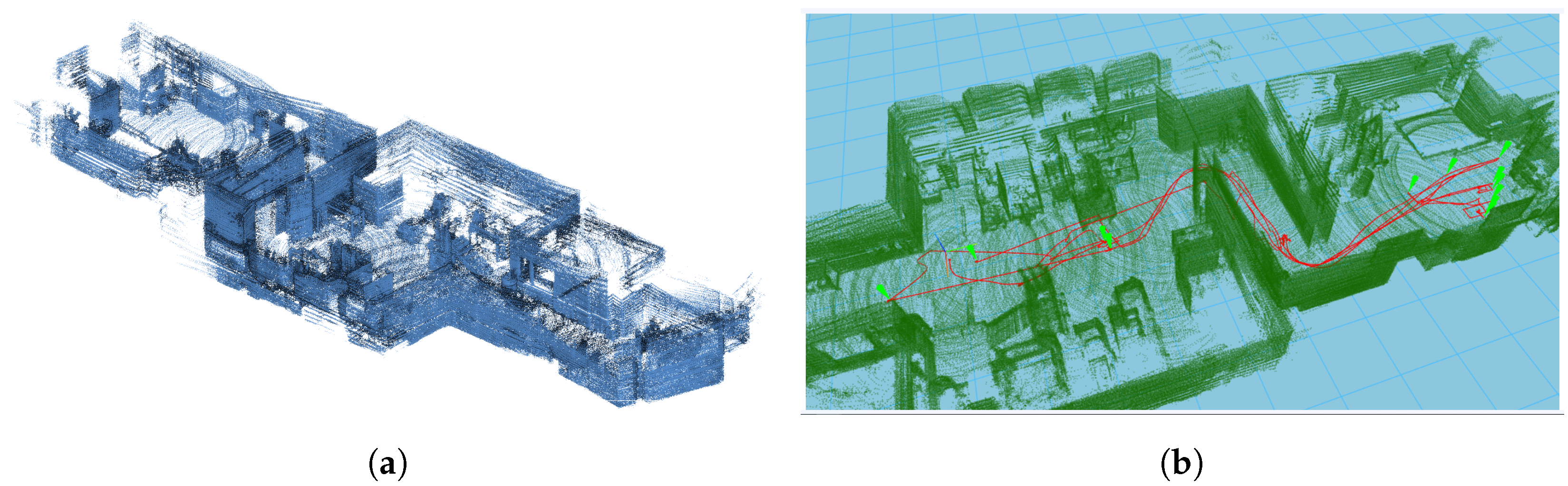
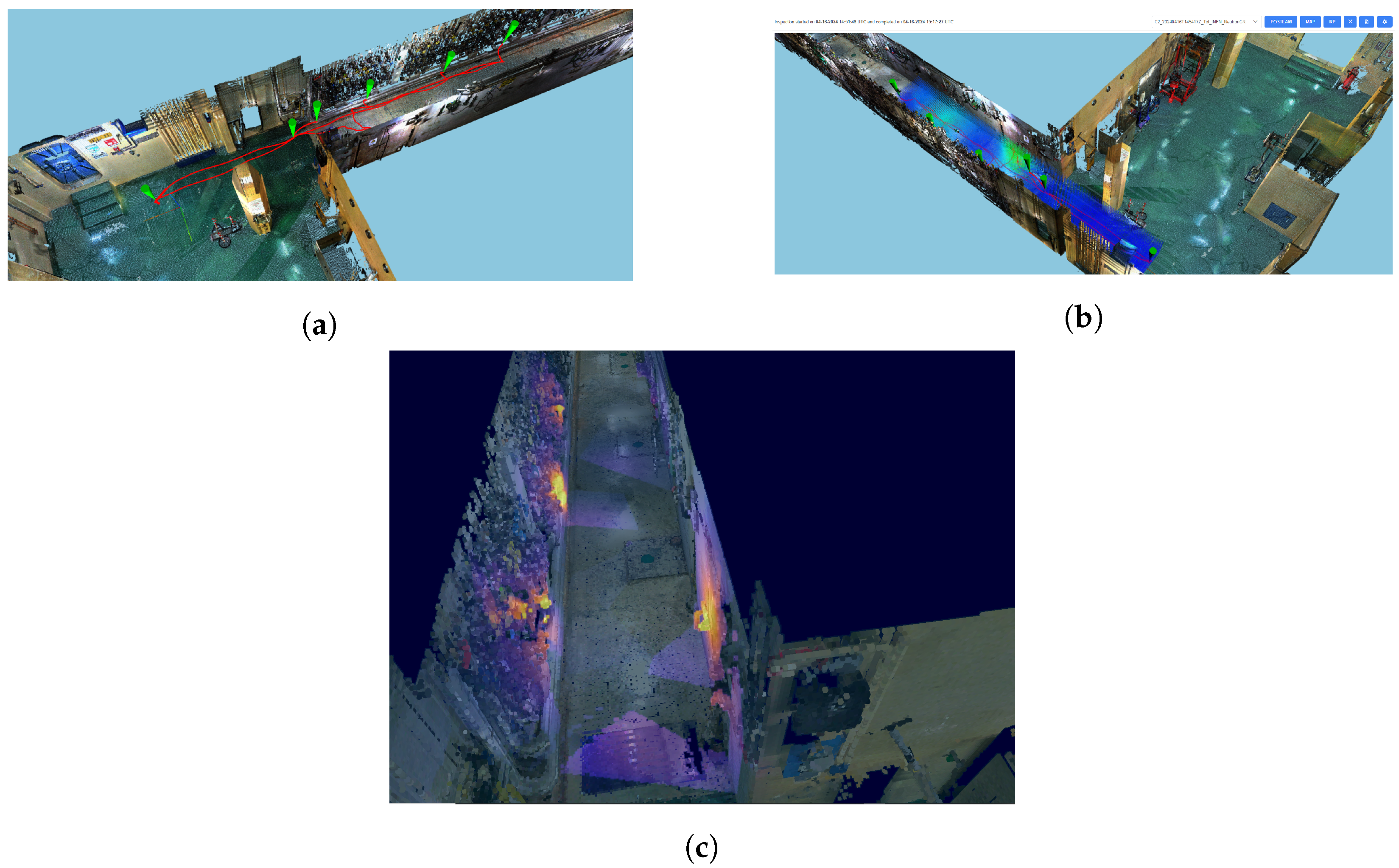
- A mapping module that uses LIO-SAM [26] to generate a 3D map. LIO-SAM is an odometry generation library based on LiDAR and IMU sensors. Sensor movement is accurately estimated by combining point cloud matching with inertial measurement. The point clouds are de-skewed using the IMU information to account for displacement during the cloud acquisition, and point cloud matching is performed against a 3D representation created from invariant points detected in the point clouds. This 3D representation is dense enough to be used as a 3D map (example shown in Figure 1a) for later navigation.
- A localization module that uses HDL_localization [27] for point cloud matching against a global map. The localization performed by this library is based on a variant of the Normal Distribution Transform (NDT) [28]. The system keeps track of the estimated position using an Unscented Kalman Filter. Each step the estimated pose is updated using inertial measurement and then refined using the aforementioned NDT method.
- A planning module that creates a 2.5D representation of the environment from the 3D map, using it to plan the robot’s trajectories using standard 2D planning algorithms. The 2.5D representation tries to extract the floor from the 3D map as an elevation surface (Figure 1b) using the ROS grid_map [29] module. From this surface, a “transitability” map is computed (Figure 1c) as a function of the slope and roughness of the terrain around each map cell. This transitability map represents the parts of the floor that are considered reachable by robot. The path planning itself is accomplished using the ROS standard navigation stack using global_planner [30] and TEB planner [31] over the transitability map stored as a 2D cost map.
2.3. Sensors
- CTZ compact sensor for source hotspot detection (CAEN). This sensor needs to be pointed at the source, as its shielding makes the detection ability directional.
- Nanopix3 imager for visual and directional identification of sources (CEA). The Nanopix3 must be pointed like a normal camera to identify sources in the image.
- GAMON-DRONE and SNIPER-GN 2.0 for neutron and source detection and identification (CAEN). These are spot sensors, sensing in all directions; they must be kept at a certain distance from the UGV to avoid occlusions.
- MiniRadMeter and MiniSiLiF low-cost sensors for and neutron source detection and identification (INFN) [32]. These are also spot sensors, meaning that occlusions should be avoided.
- PSD phoswitch / detector for large-surface contamination measurement (CAEN). It must be placed close to the surface to be measured and moved in parallel from it to ensure full surface coverage.
- Surface pixelated / detector based on plastic scintillators for large-surface contamination measurement (CEA), with similar requirements to the previous sensor.
- Cryogenic system for air contamination monitoring and 14CO2 detection (ENEA). This is a very large and heavy system unsuitable for embarked UGV operation.
- OSL/FO dosimetry and shape-sensing for monitoring of large structures (CEA). A long and flexible sensor with a very complex deployment procedure, operation of this sensor by a single robotic arm is impracticable.
2.4. Data Fusion and Digital Twin
3. Sensor Integration and Configurations
3.1. Mounting
- Mounted directly over the UGV plate: This was the case for most of the electronic boxes accompanying the sensors. The MiniRadMeter and MiniSiLiF sensors could also be mounted directly over the plate, though with reduced sensitivity.
- Mounted on the robot arm’s flange: This was used for sensors that need to be close to the source (CTZ sensor), sensors that measure surfaces (PSD and Pixelated detectors), and sensors that need to be pointed at a source (NanoPix3). Customized tooling for mounting the different sensors was designed and manufactured by the partner Ansaldo Nucleare.
- Mounted on top of a pole: GAMON-DRONE, SNIPER-GN, MiniRadMeter, and MiniSiLiF are ambient sensors, and as such need to be separated as much as possible from the UGV to avoid the shielding it provides. These sensors were mounted on top of a 50 cm pole.
3.2. Power
3.3. Data Connectivity and Management
- An access point inside the UGV provided a local WiFi connection. This connectivity was used by the CTZ, PSD, Pixelated, GAMON-DRONE, and SNIPER-GN sensors.
- Several RJ-45 external connectors, including PoE, were available to connect sensors to the UGV’s internal network. The Nanopix3 and the MiniRadMeter and MiniSiLiF used this power connection.
- Several USB 2.0 and 3.0 external connectors were also available. While the Nanopix3 and CTZ could use these for power, they were not used in the tested configurations.
- Clock synchronization: Because the UGV is expected to move around the environment, all sensor measurements must be accurately timed to ensure proper data visualization. As the UGV is the central element, an NTP server was set up to allow all the sensors to synchronize their clocks with the UGV’s time.
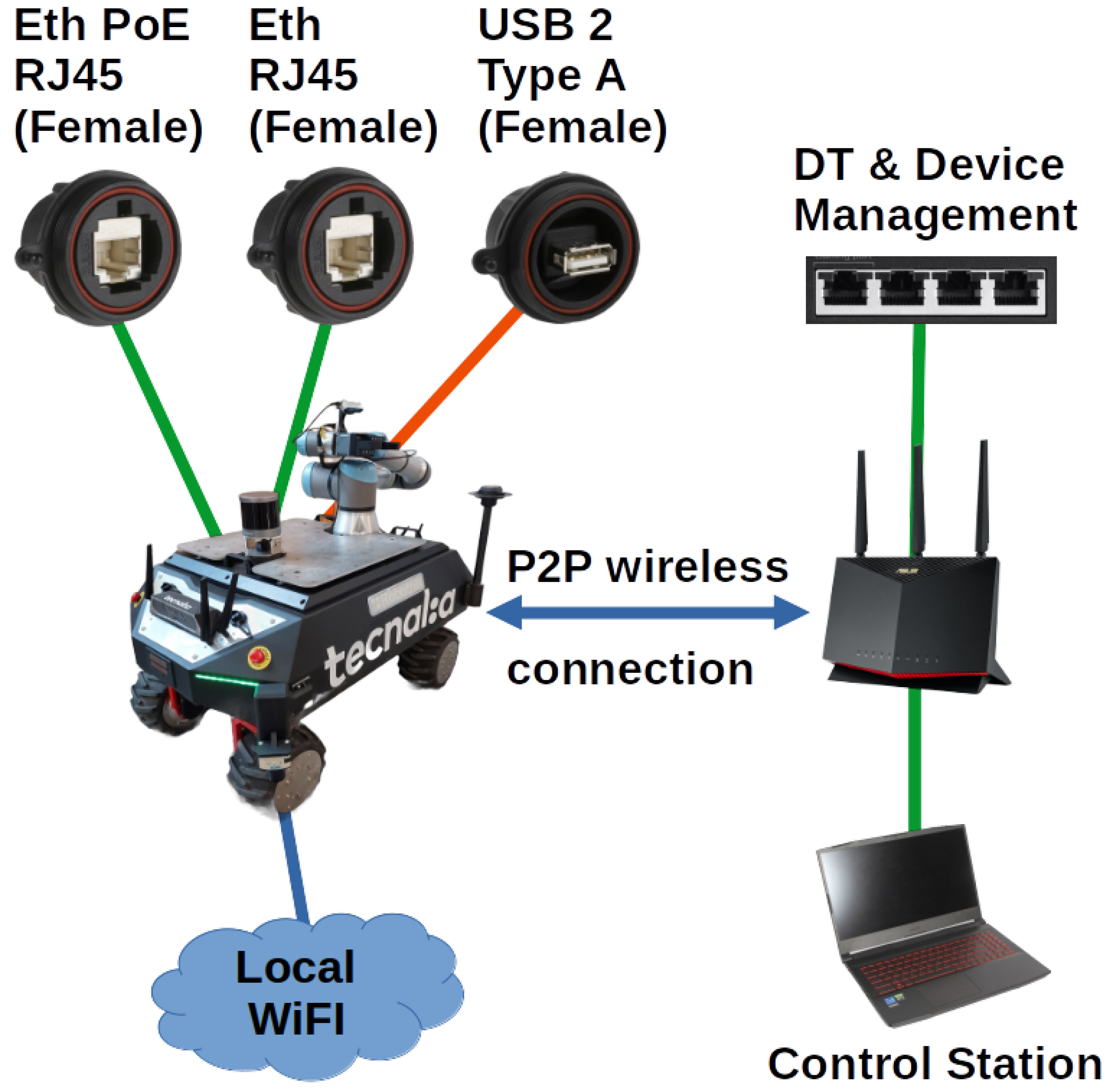
- Remote data gathering and sensor management: The sensors mounted on the UGV have local access to its internal network through Ethernet or WiFi. This local WiFi has a low range and bandwidth, making it unsuitable for remote sensor management, especially if it must share bandwidth with the teleoperation connection. Thus, a UGV control station architecture was built, as shown in Figure 3. Sensors connect to the UGV by the available means, while the DT and the sensors’ remote management equipment connect to a control station using Ethernet. The connection between the UGV and the control station is provided by a dedicated high-bandwidth P2P wireless connection using WiFi 6.
- Local data storage: All the sensor measurements are stored in text format logs, as are the poses of the UGV and the arm. The UGV provides local storage for these logs using Samba and FTP shares. The logs can be retrieved by the DT after the mission, guaranteeing that data are registered even if communication with the UGV is lost.
4. Testing and Demonstrator
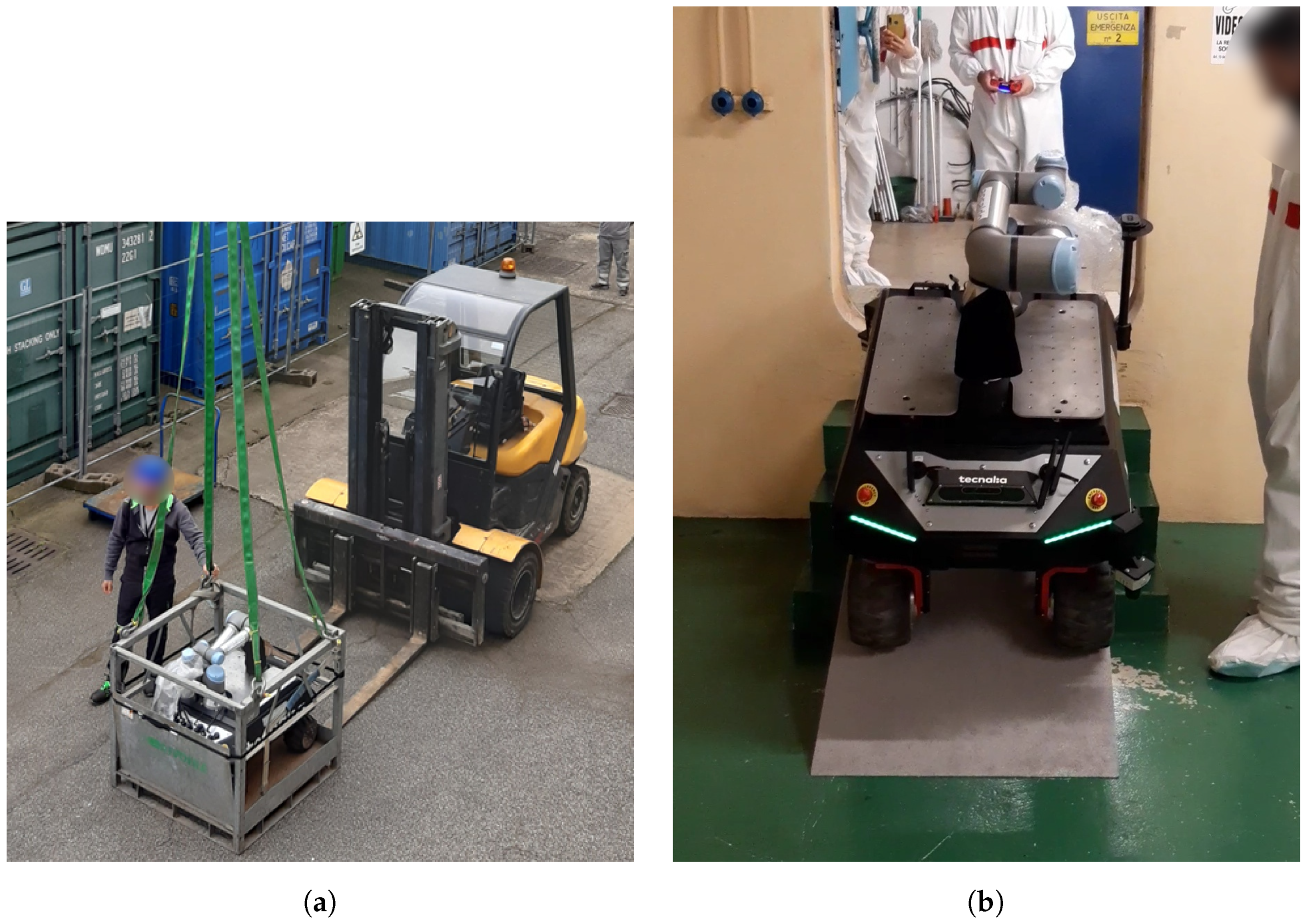
4.1. Integration Testing at TECNALIA and AiNT
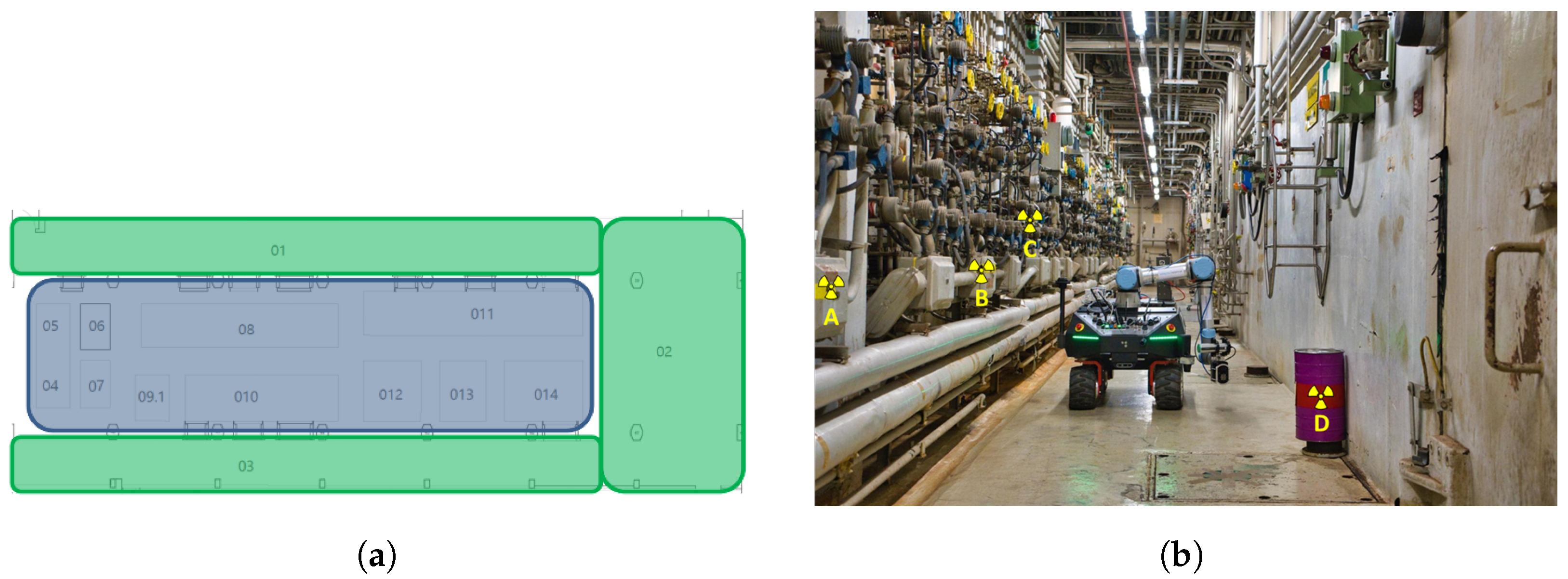
4.2. Demonstrator at the EUREX Plant
- Point A: source containing 241Am + 10Be.
- Point B: source containing 137Cs.
- Point C: source containing 241Am.
- Point D: real waste drum containing 241Am and a not quantified amount of Pu.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-Dimensional |
| 3D | Three-Dimensional |
| AMR | Autonomous Mobile Robot |
| DC | Direct Current |
| D&D | Dismantling and Decommissioning |
| DT | Digital Twin |
| FTP | File Transfer Protocol |
| GPS | Global Positioning System |
| HMI | Human–Machine Interface |
| HW | Hardware |
| IMU | Inertial Measurement Unit |
| LiDAR | Light Detection And Ranging |
| NDT | Normal Distribution Transform |
| NTP | Network Time Protocol |
| P2P | Point-to-Point |
| PoE | Power over Ethernet |
| ROS | Robot Operating System |
| SW | Software |
| UAS | Unmanned Aircraft System |
| UGV | Unmanned Ground Vehicle |
| USB | Universal Serial Bus |
References
- Trevelyan, J.; Hamel, W.R.; Kang, S.C. Robotics in Hazardous Applications. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 1521–1548. [Google Scholar] [CrossRef]
- Industrial Safety Guidelines for Nuclear Facilities; International Atomic Energy Agency: Vienna, Austria, 2018; ISBN 9789201016171.
- Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics 2020, 9, 94. [Google Scholar] [CrossRef]
- Fisher, M.; Cardoso, R.C.; Collins, E.C.; Dadswell, C.; Dennis, L.A.; Dixon, C.; Farrell, M.; Ferrando, A.; Huang, X.; Jump, M.; et al. An Overview of Verification and Validation Challenges for Inspection Robots. Robotics 2021, 10, 67. [Google Scholar] [CrossRef]
- Yokokohji, Y. The Use of Robots to Respond to Nuclear Accidents: Applying the Lessons of the Past to the Fukushima Daiichi Nuclear Power Station. Annu. Rev. Control Robot. Auton. Syst. 2021, 4, 681–710. [Google Scholar] [CrossRef]
- Vitanov, I.; Farkhatdinov, I.; Denoun, B.; Palermo, F.; Otaran, A.; Brown, J.; Omarali, B.; Abrar, T.; Hansard, M.; Oh, C.; et al. A Suite of Robotic Solutions for Nuclear Waste Decommissioning. Robotics 2021, 10, 112. [Google Scholar] [CrossRef]
- Ou, Y.; Xu, B.; Cai, H.; Zhao, J.; Fan, J. An overview on mobile manipulator in nuclear applications. In Proceedings of the 2022 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Guiyang, China, 17–22 July 2022; pp. 239–243. [Google Scholar] [CrossRef]
- Kanaan, D.; Dogny, S.; Varet, T. Robot for investigations and assessments of nuclear areas. In Proceedings of the 2015 4th International Conference on Advancements in Nuclear Instrumentation Measurement Methods and their Applications (ANIMMA), Lisbon, Portugal, 20–24 April 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Będkowski, J. Introductory Chapter: Autonomous Mobile Mapping Robots— Current State and Future Real-World Challenges. In Autonomous Mobile Mapping Robots; IntechOpen: Rijeka, Croatia, 2023. [Google Scholar] [CrossRef]
- Groves, K.; Hernandez, E.; West, A.; Wright, T.; Lennox, B. Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation. Robotics 2021, 10, 78. [Google Scholar] [CrossRef]
- Zhou, H.f.; Zhang, H.; Qiu, M.w. Radiation avoiding algorithm for nuclear robot path optimization. Ann. Nucl. Energy 2022, 169, 108948. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, H.; Chen, Y.; Cheng, L.; Zhang, B. Patrol robot path planning in nuclear power plant using an interval multi-objective particle swarm optimization algorithm. Appl. Soft Comput. 2022, 116, 108192. [Google Scholar] [CrossRef]
- Konukbay, A.; Koluman, A. Swarm Robots in CBRN Decontamination: Enhancing Efficiency and Safety. J. Smart Syst. Res. 2023, 4, 72–81. [Google Scholar] [CrossRef]
- Szczurek, K.A.; Prades, R.M.; Matheson, E.; Rodriguez-Nogueira, J.; Castro, M.D. Multimodal Multi-User Mixed Reality Human–Robot Interface for Remote Operations in Hazardous Environments. IEEE Access 2023, 11, 17305–17333. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- West, A.; Tsitsimpelis, I.; Licata, M.; Jazbec, A.; Snoj, L.; Joyce, M.J.; Lennox, B. Use of Gaussian process regression for radiation mapping of a nuclear reactor with a mobile robot. Sci. Rep. 2021, 11, 13975. [Google Scholar] [CrossRef] [PubMed]
- Gabrlik, P.; Lazna, T.; Jilek, T.; Sladek, P.; Zalud, L. An automated heterogeneous robotic system for radiation surveys: Design and field testing. J. Field Robot. 2021, 38, 657–683. [Google Scholar] [CrossRef]
- Bird, B.; Nancekievill, M.; West, A.; Hayman, J.; Ballard, C.; Jones, W.; Ross, S.; Wild, T.; Scott, T.; Lennox, B. Vega—A small, low cost, ground robot for nuclear decommissioning. J. Field Robot. 2022, 39, 232–245. [Google Scholar] [CrossRef]
- Michel, M.; Amoyal, G.; Schoepff, V. CLEANDEM, a Cyber physicaL Equipment for unmAnned Nuclear DEcommissioning Measurements. EPJ Web Conf. 2023, 288, 07004. [Google Scholar] [CrossRef]
- Cyber physicaL Equipment for unmAnned Nuclear DEcommissioning Measurements|CLEANDEM Project|Fact Sheet|H2020. Available online: https://cordis.europa.eu/project/id/945335 (accessed on 12 June 2024).
- Outón, J.L.; Villaverde, I.; Herrero, H.; Esnaola, U.; Sierra, B. Innovative Mobile Manipulator Solution for Modern Flexible Manufacturing Processes. Sensors 2019, 19, 5414. [Google Scholar] [CrossRef] [PubMed]
- Outón, J.L.; Merino, I.; Villaverde, I.; Ibarguren, A.; Herrero, H.; Daelman, P.; Sierra, B. A Real Application of an Autonomous Industrial Mobile Manipulator within Industrial Context. Electronics 2021, 10, 1276. [Google Scholar] [CrossRef]
- RB-VOGUI Mobile Robot-Outdoor Mobile Robot|Robotnik®. Available online: https://robotnik.eu/products/mobile-robots/rb-vogui-en/ (accessed on 12 June 2024).
- Stanford Artificial Intelligence Laboratory-Robotic Operating System. Available online: https://ros.org/ (accessed on 12 June 2024).
- UR5e Lightweight, Versatile Cobot. Available online: https://www.universal-robots.com/products/ur5-robot/ (accessed on 12 June 2024).
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5135–5142, ISSN 2153-0866. [Google Scholar] [CrossRef]
- Koide, K.; Miura, J.; Menegatti, E. A portable three-dimensional LIDAR-based system for long-term and wide-area people behavior measurement. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419841532. [Google Scholar] [CrossRef]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef]
- Fankhauser, P.; Hutter, M. A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation. In Robot Operating System (ROS): The Complete Reference (Volume 1); Koubaa, A., Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 99–120. [Google Scholar] [CrossRef]
- Lu, D. global_planner. Available online: https://wiki.ros.org/global_planner (accessed on 12 June 2024).
- Rösmann, C.; Hoffmann, F.; Bertram, T. Integrated online trajectory planning and optimization in distinctive topologies. Robot. Auton. Syst. 2017, 88, 142–153. [Google Scholar] [CrossRef]
- Rossi, F.; Cosentino, L.; Longhitano, F.; Minutoli, S.; Musico, P.; Osipenko, M.; Poma, G.E.; Ripani, M.; Finocchiaro, P. The Gamma and Neutron Sensor System for Rapid Dose Rate Mapping in the CLEANDEM Project. Sensors 2023, 23, 4210. [Google Scholar] [CrossRef] [PubMed]
- RINA-CSM. Q-Pro2–Process, Plant, Production Monitoring Platform; Zenodo: Boston, MA, USA, 2024. [Google Scholar] [CrossRef]
- ORANO. PoStLAM Software (Presentation and Videos). 2024. Available online: https://zenodo.org/records/11191197 (accessed on 12 June 2024).
- Theroine, C. D7.3 Design to facilitate cleaning and reuse of robotics platforms. CLEANDEM project’s deliverable submitted to the EC. 2024. [Google Scholar]
- Pancotti, F.; Sciacqua, R. D9.4 Report on Final Demo. CLEANDEM project’s deliverable submitted to the EC. 2024. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Sensors | Power | Data | Arm | Pole |
|---|---|---|---|---|---|
| 1 | Nanopix3 | PoE | Ethernet | Yes | No |
| CTZ compact sensor | Battery | WiFi | Yes | No | |
| MiniRadMeter & MiniSiLiF | 24 V | Ethernet | No | No | |
| 2 | PSD phoswitch | Battery | WiFi | Yes | No |
| MiniRadMeter & MiniSiLiF | 24 V | Ethernet | No | No | |
| 3 | Pixelated detector | Battery | WiFi | Yes | No |
| MiniRadMeter & MiniSiLiF | 24 V | Ethernet | No | No | |
| 4 | GAMON-DRONE | Battery | WiFi | No | Yes |
| SNIPER-GN | Battery | WiFi | No | Yes | |
| MiniRadMeter & MiniSiLiF | 24 V | Ethernet | No | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villaverde, I.; Urquiza, A.; Outón, J.L. A Reconfigurable UGV for Modular and Flexible Inspection Tasks in Nuclear Sites. Robotics 2024, 13, 110. https://doi.org/10.3390/robotics13070110
Villaverde I, Urquiza A, Outón JL. A Reconfigurable UGV for Modular and Flexible Inspection Tasks in Nuclear Sites. Robotics. 2024; 13(7):110. https://doi.org/10.3390/robotics13070110
Chicago/Turabian StyleVillaverde, Ivan, Arkaitz Urquiza, and Jose Luis Outón. 2024. "A Reconfigurable UGV for Modular and Flexible Inspection Tasks in Nuclear Sites" Robotics 13, no. 7: 110. https://doi.org/10.3390/robotics13070110
APA StyleVillaverde, I., Urquiza, A., & Outón, J. L. (2024). A Reconfigurable UGV for Modular and Flexible Inspection Tasks in Nuclear Sites. Robotics, 13(7), 110. https://doi.org/10.3390/robotics13070110