

Assembly Modes and Workspace Analysis of a 3-RRR Planar Manipulator †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
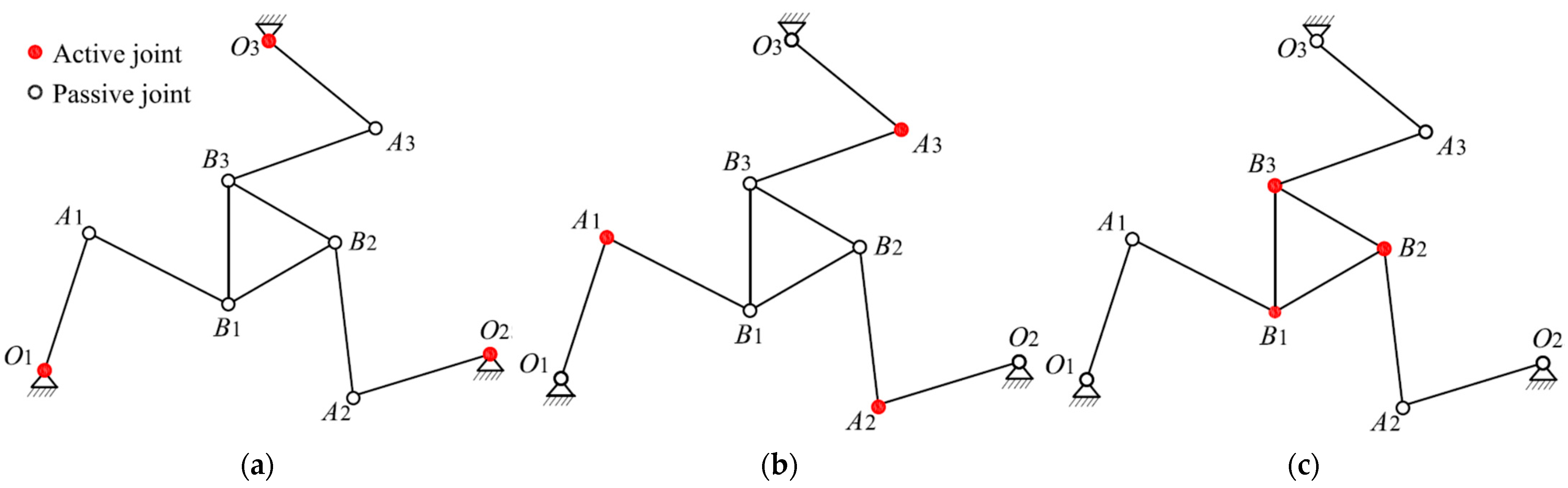
2. Assembly Modes and Manipulator Workspace
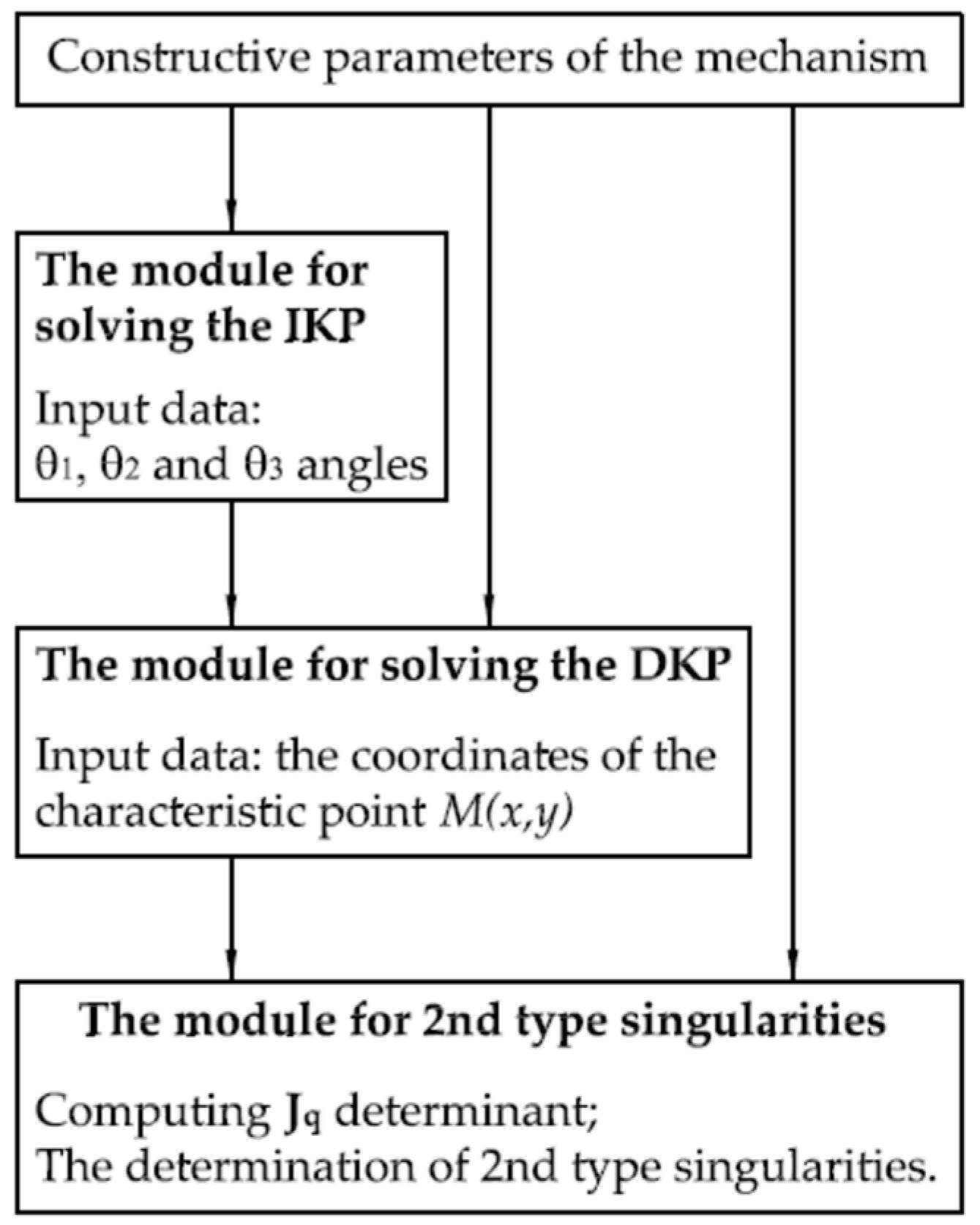
3. Singularities Within the Manipulator’s Workspace
4. Experimental Platform Concept and Prototype
5. Discussion
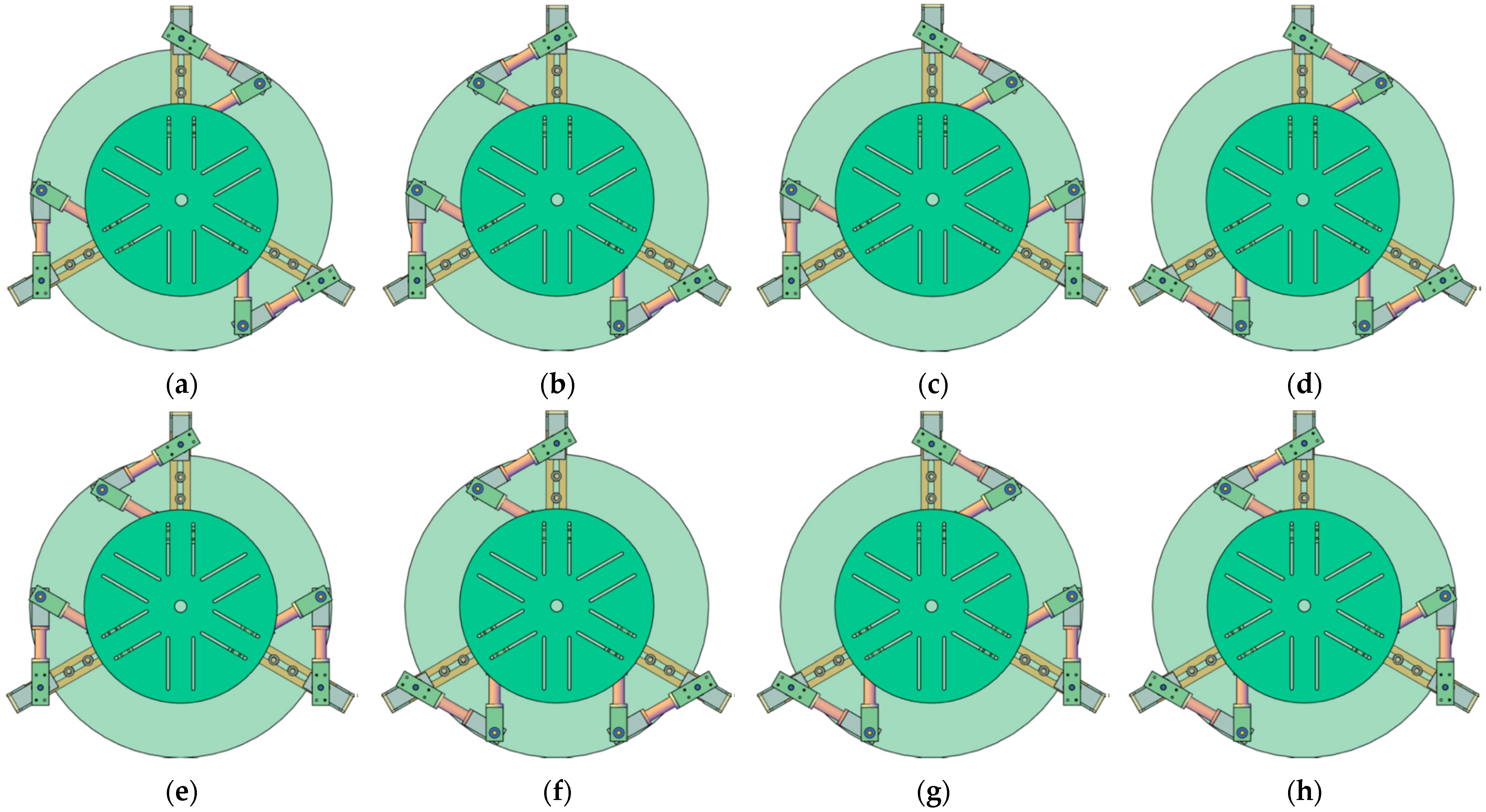
- In Figure 5a, the distance L between the joints was modified;
- In Figure 5b, the length b of the side of the equilateral triangle formed by the joints was modified, for an orientation angle of ;
- In Figure 5c, the same length b was modified, but for an orientation angle of ;
- In Figure 5d, the length of the links was varied;
- In Figure 5e, the length of the links was varied;
- In Figure 5f, the orientation angle φ of the end effector was modified.
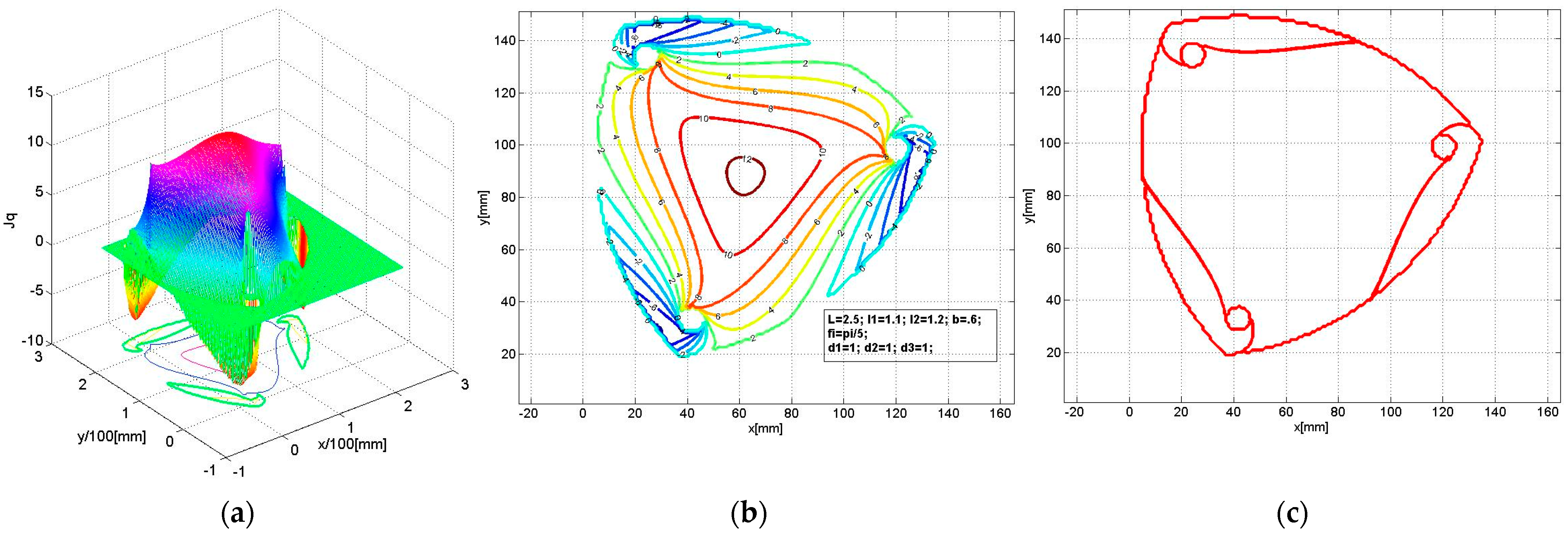
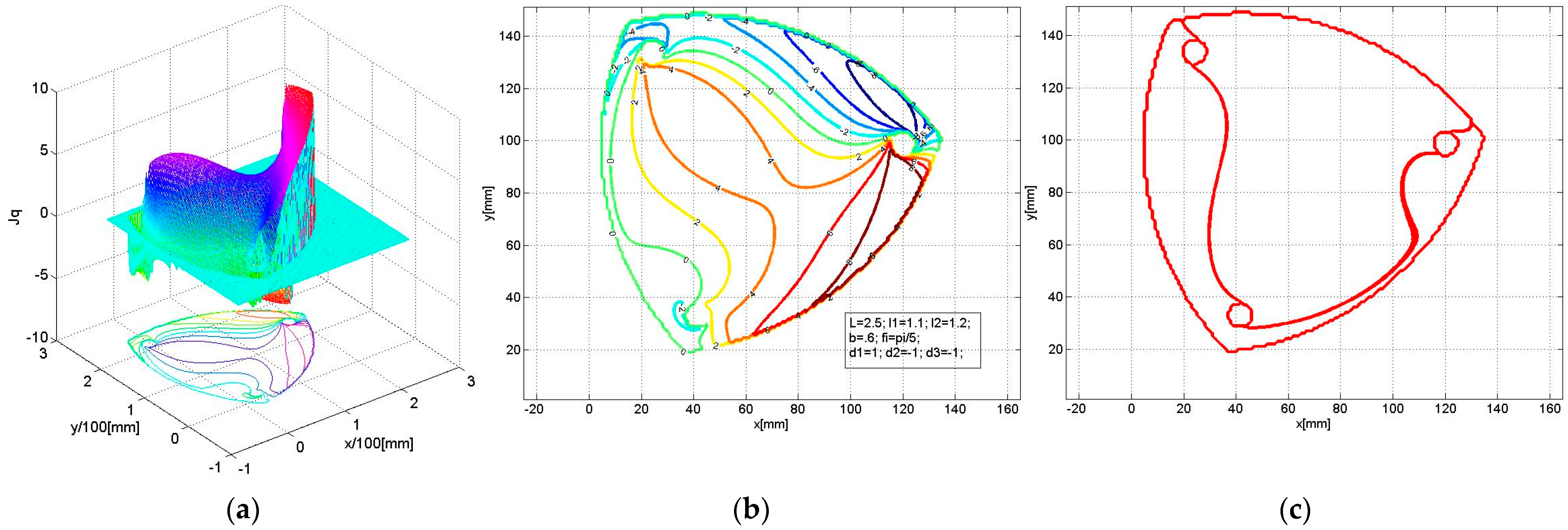
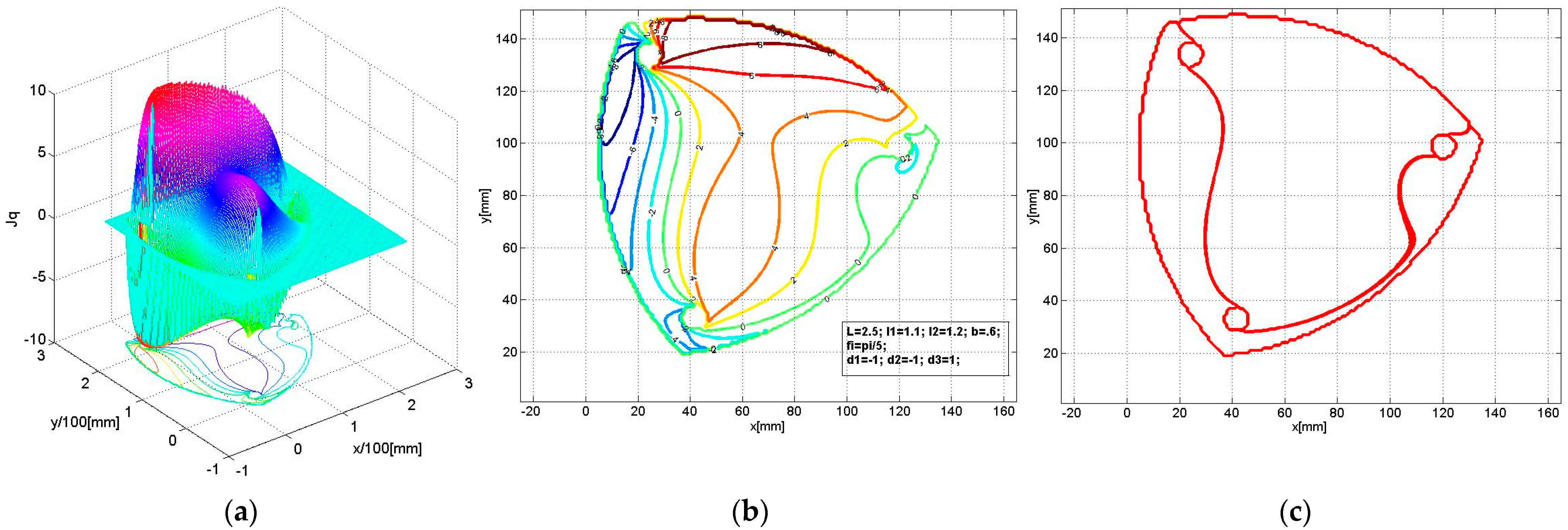
- In subfigures labeled (a), the determinant det(Jq) is illustrated as a 3D surface intersected by the plane det(Jq) = 0, which defines the singularities;
- In subfigures (b), the same surface is represented as contour lines, showing characteristic lines specific to singularities (level 0);
- In subfigures (c), only the singularity contours obtained by intersecting the surfaces with the 0-plane are shown.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PPM | Planar parallel manipulator |
| IKP | Inverse kinematics problem |
| DKP | Direct kinematics problem |
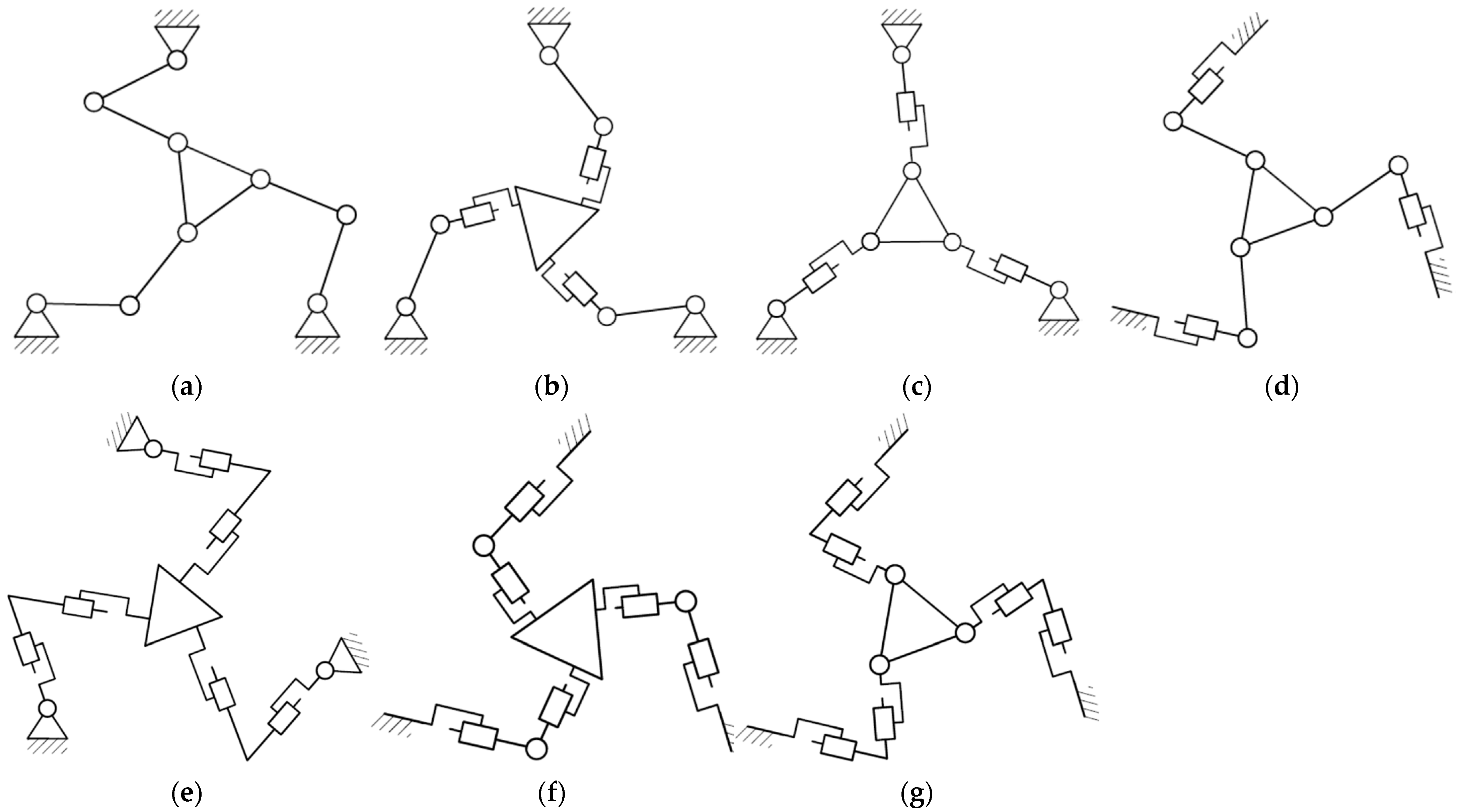
| RRR | Revolute–revolute–revolute |
| RRP | Revolute–revolute–prismatic |
| RPR | Revolute–prismatic–revolute |
| PRR | Prismatic–revolute–revolute |
| RPP | Revolute–prismatic–prismatic |
| PRP | Prismatic–revolute–prismatic |
| PPR | Prismatic–prismatic–revolute |
References
- Asada, H.; Slotine, J.J. Robot Analysis and Control; John Wiley & Sons: Hoboken, NJ, USA, 1986. [Google Scholar]
- Fu, K.S.; Gonzalez, R.; Lee, C.S.G. Robotics: Control, Sensing, Vision, and Intelligence; McGraw-Hill: London, UK, 1987. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Addison Wesley: Boston, UK, 1989. [Google Scholar]
- Tsai, L.W. Robot Analysis, The Mechanics of Serial and Parallel Manipulators; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Balan, R.; Maties, V.; Stan, S.; Lapusan, C. On the Control of a 3-RRR Planar Parallel Minirobot. J. Rom. Soc. Mechatron. 2005, 4, 20–23. [Google Scholar]
- Racu, C.M.; Doroftei, I. Ankle rehabilitation device with two degrees of freedom and compliant joint. IOP Conf. Ser. Mater. Sci. Eng. 2015, 95, 012054. [Google Scholar] [CrossRef]
- Racu, C.M.; Doroftei, I. An overview on ankle rehabilitation devices. Adv. Mater. Res. 2014, 1036, 781–786. [Google Scholar] [CrossRef]
- Morar, C.A.; Doroftei, I.A.; Doroftei, I.; Hagan, M.G. Robotic applications on agricultural industry. A review. IOP Conf. Ser. Mater. Sci. Eng. 2020, 997, 12081. [Google Scholar] [CrossRef]
- Doroftei, I.A.; Bujoreanu, C.; Doroftei, I. An overview on the applications of mechanisms in architecture. Part II: Foldable plate structures. IOP Conf. Ser. Mater. Sci. Eng. 2018, 444, 52019. [Google Scholar] [CrossRef]
- Stewart, D. A Platform with Six Degrees of freedom. Proc. Inst. Mech. Enginners 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Dash, A.K.; Chen, I.-M.; Yeo, S.H.; Yang, G. Task-oriented configuration design for reconfigurable parallel manipulator systems. Int. J. Comput. Integr. Manuf. 2005, 18, 615–634. [Google Scholar] [CrossRef]
- Kucuk, S. A dexterity comparison for 3-DOF planar parallel manipulators with two kinematic chains using genetic algorithms. Mechatronics 2009, 19, 868–877. [Google Scholar] [CrossRef]
- Zhou, K.; Tao, Z.; Zhao, J.; Mao, D. Singularity loci research on high-speed travelling type of double four-rod spatial parallel mechanism. Mech. Mach. Theory 2003, 38, 195–211. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Hatwal, H.; Ghosh, A. Comparison of an exact and an approximate method of singularity avoidance in platform type parallel manipulators. Mech. Mach. Theory 1998, 33, 965–974. [Google Scholar] [CrossRef]
- Dasgupta, B.; Mruthyunjaya, T.S. Singularity-free path planning for the Stewart platform manipulator. Mech. Mach. Theory 1998, 33, 711–725. [Google Scholar] [CrossRef]
- Sen, S.; Dasgupta, B.; Mallik, A.K. Variational approach for singularity-free path-planning of parallel manipulators. Mech. Mach. Theory 2003, 38, 1165–1183. [Google Scholar] [CrossRef]
- Dash, A.K.; Chen, I.M.; Yeo, S.H.; Yang, G. Workspace generation and planning singularity-free path for parallel manipulators. Mech. Mach. Theory 2005, 40, 776–805. [Google Scholar] [CrossRef]
- Liu, S.; Qiu, Z.-C.; Zhang, X.-M. Singularity and path-planning with the working mode conversion of a 3-DOF 3-RRR planar parallel manipulator. Mech. Mach. Theory 2017, 107, 166–182. [Google Scholar] [CrossRef]
- Bonev, I.A.; Gosselin, C.M. Singularity Loci of Planar Parallel Manipulators with Revolute Joints. In Computational Kinematics; Park, F.C., Iurascu, C.C., Eds.; Seoul, Republic of Korea, 2001; pp. 291–299. Available online: https://www.parallemic.org/Reviews/Review001.html (accessed on 31 March 2024).
- Gosselin, C. Kinematic Analysis, Optimization and Programming of Parallel Robotic Manipulator. Ph.D Thesis, Department of Mechanical Engineering, McGill University, Montreal, QC, Canada, 1988. [Google Scholar]
- Chablat, D.; Wenger, P. The Kinematic Analysis of a Symmetrical Three-Degree-of-Freedom Planar Parallel Manipulator. arXiv arXiv:0705.0959.
- Doroftei, I. Singularity analysis of a 3RRR planar parallel robot I-Theoretical aspects. Bul. Institutului Politeh. Din Iaşi 2008, 54, 465–472. [Google Scholar]
- Doroftei, I. Singularity analysis of a 3RRR planar parallel robot II-Physical significance. Bul. Institutului Politeh. Din Iaşi 2008, 54, 473–480. [Google Scholar]
- Arsenault, M.; Boudreau, R. The synthesis of three-degree-of-freedom planar mechanism with revolute joints (3-RRR) for an optimal singularity-free workspace. J. Robot. Syst. 2004, 21, 259–274. [Google Scholar] [CrossRef]
- Merlet, J.-P. Le Robots Paralleles, 2nd ed.; Editions Hermes: Paris, France, 1997. [Google Scholar]
- Buium, F.; Leohchi, D.; Doroftei, I. A workspace characterization of the 3 RRR planar mechanism. Appl. Mech. Mater. 2014, 658, 563–568. [Google Scholar] [CrossRef]
- Buium, F.; Doroftei, I. Workspace Analysis of a 3 RRR Planar Mechanism. In 25th International Symposium on Measurements and Control in Robotics, Proceedings of ISMCR 2023; Doroftei, I., Kiss, B., Baudoin, Y., Taqvi, Z., Keller Fuchter, S., Eds.; Springer: Cham, Switzerland, 2024; Mechanisms and Machine Science; Volume 154, pp. 73–82. [Google Scholar]
- Lovasz, E.C.; Grigorescu, S.M.; Mărgineanu, D.T.; Pop, C.; Gruescu, C.M.; Maniu, I. Kinematics of the planar parallel Manipulator using Geared Linkages with linear Actuation as kinematic Chains 3-R (RPRGR) RR. In Proceedings of the 14th IFToMM World Congress, Taipei, Taiwan, 25 October 2015; pp. 25–30. [Google Scholar]
- Lovasz, E.C.; Grigorescu, S.M.; Mărgineanu, D.T.; Pop, C.; Gruescu, C.M.; Maniu, I. Geared Linkages with Linear Actuation Used as Kinematic Chains of a Planar Parallel Manipulator. In Mechanisms, Transmissions and Applications: Proceedings of the Third MeTrApp Conference; Corves, B., Lovasz, E.C., Husing, M., Eds.; Springer: Cham, Switzerland, 2015; Mechanisms and Machine Science; Volume 31, pp. 21–31. [Google Scholar]
- Buium, F.; Doroftei, I.; Alaci, S. Assembling Modes of a 3-RRR Planar Mechanism and Its Workspace Analysis. In Mechanism Design for Robotics. MEDER 2024; Lovasz, E.C., Ceccarelli, M., Ciupe, V., Eds.; Springer: Cham, Switzerland, 2024; Mechanisms and Machine Science; Volume 166, pp. 62–72. [Google Scholar]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buium, F.; Doroftei, I.; Alaci, S. Assembly Modes and Workspace Analysis of a 3-RRR Planar Manipulator. Robotics 2025, 14, 16. https://doi.org/10.3390/robotics14020016
Buium F, Doroftei I, Alaci S. Assembly Modes and Workspace Analysis of a 3-RRR Planar Manipulator. Robotics. 2025; 14(2):16. https://doi.org/10.3390/robotics14020016
Chicago/Turabian StyleBuium, Florentin, Ioan Doroftei, and Stelian Alaci. 2025. "Assembly Modes and Workspace Analysis of a 3-RRR Planar Manipulator" Robotics 14, no. 2: 16. https://doi.org/10.3390/robotics14020016
APA StyleBuium, F., Doroftei, I., & Alaci, S. (2025). Assembly Modes and Workspace Analysis of a 3-RRR Planar Manipulator. Robotics, 14(2), 16. https://doi.org/10.3390/robotics14020016