A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- the axes of the two intermediate R-pairs are parallel to one another, and
- (ii)
- the axes of the two ending R-pairs are parallel to each other.
- (a)
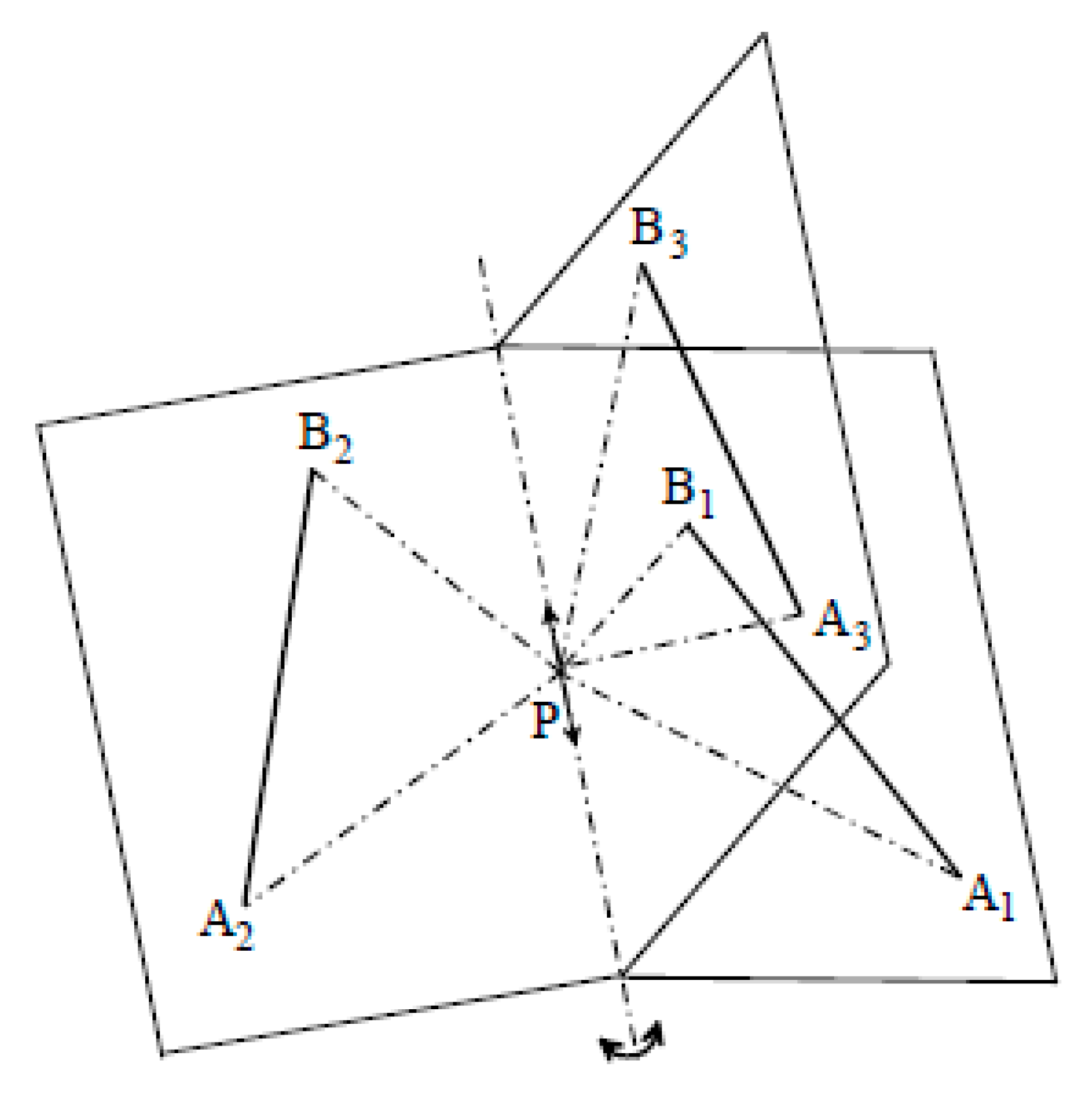
- the platform and the base are manufactured so that the three R-pair axes embedded in them have a common intersection point;
- (b)
- each UPU limb (Figure 5) is manufactured and assembled so that the axes of the two intermediate R-pairs are parallel to one another; and
- (c)
- the 3-UPU is assembled so that the axes of the six R-pairs adjacent to the base or to the platform share a common intersection point (such point becomes the spherical motion center).
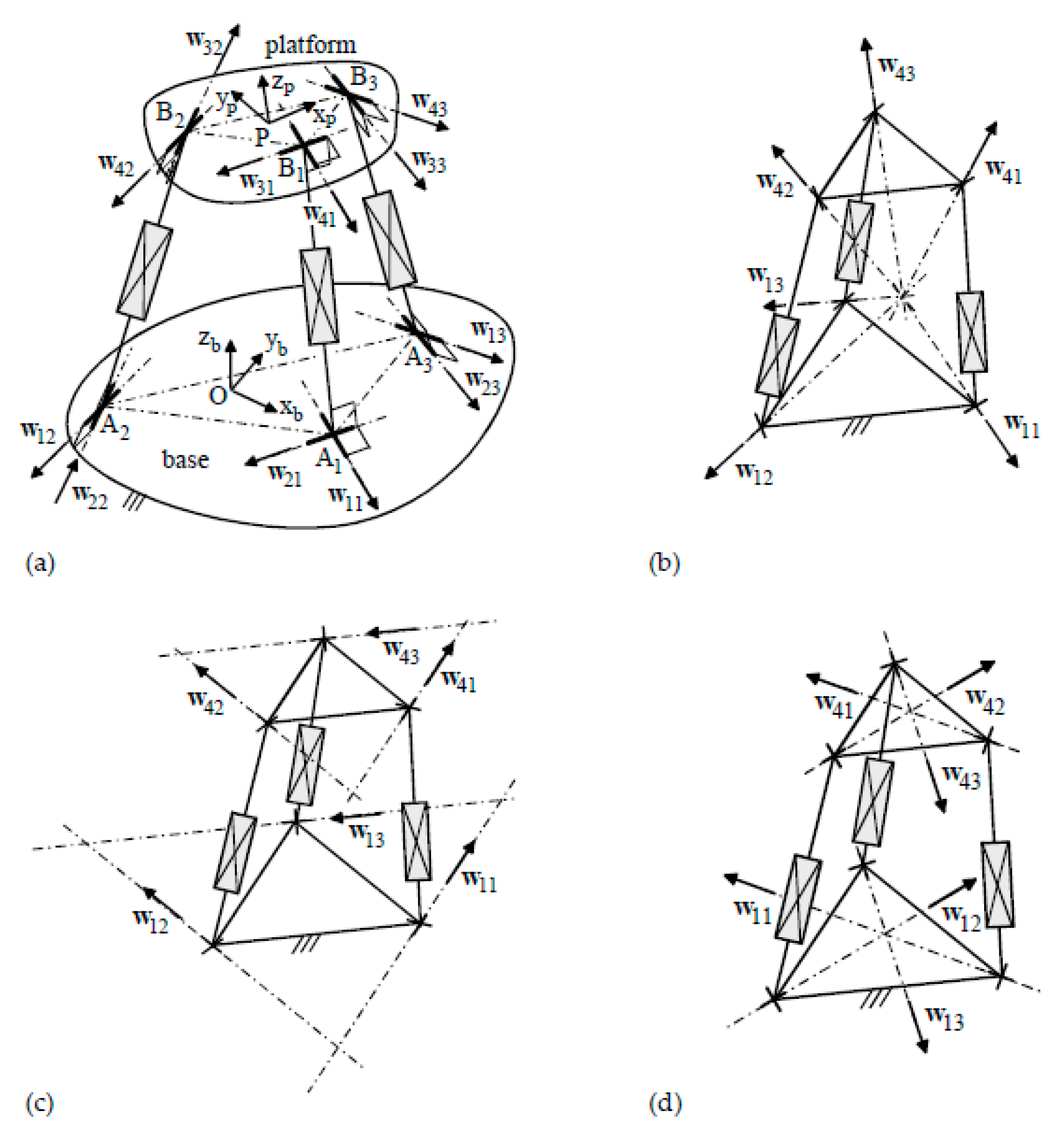
2. Background, Notations, and General Comments
- -
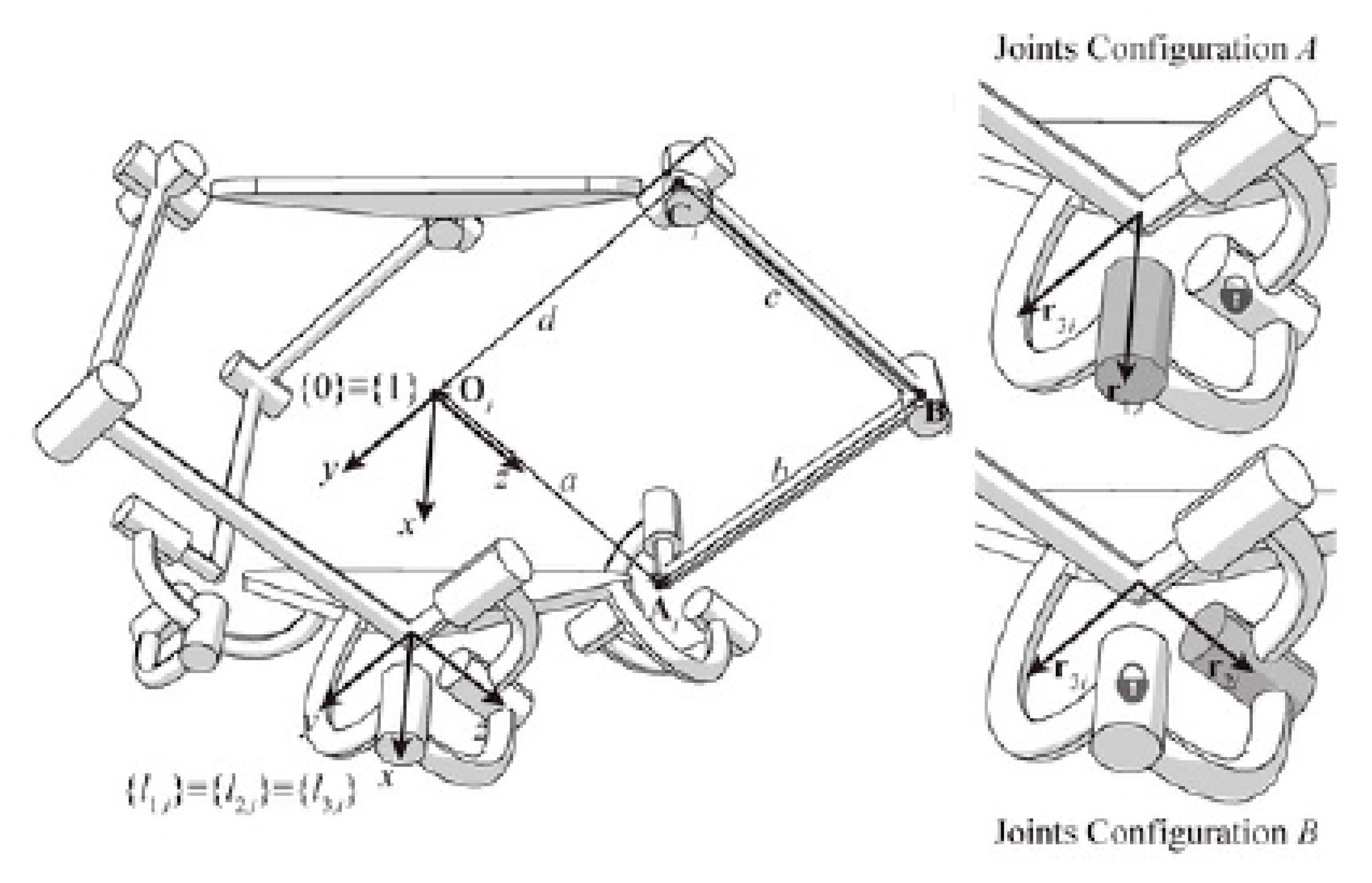
- Oxbybzb and Pxpypzp are two Cartesian references fixed to the base and the platform, respectively;
- -
- Ai (Bi) for i = 1, 2, 3 are the centers of the U joints adjacent to the base (platform);
- -
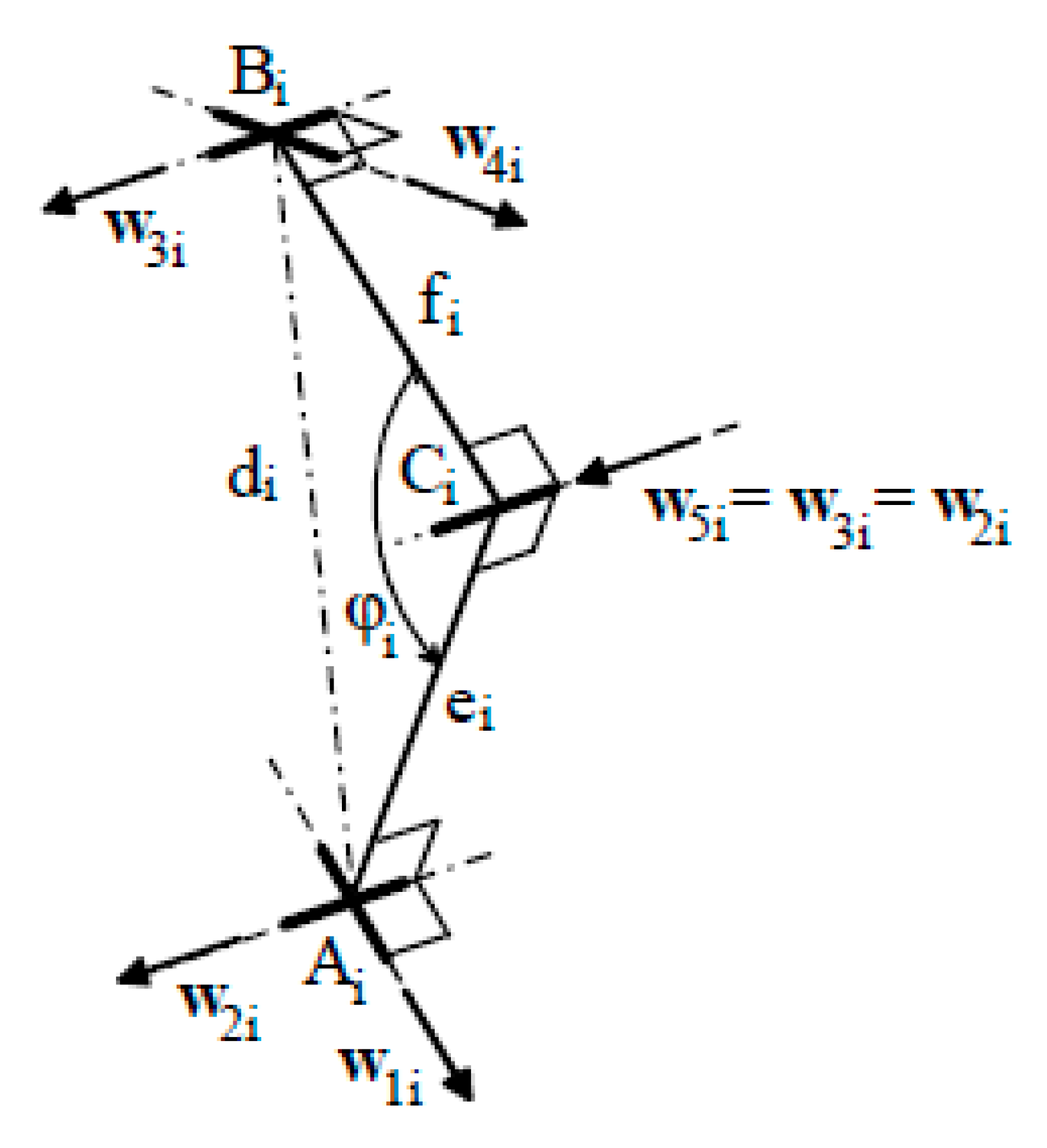
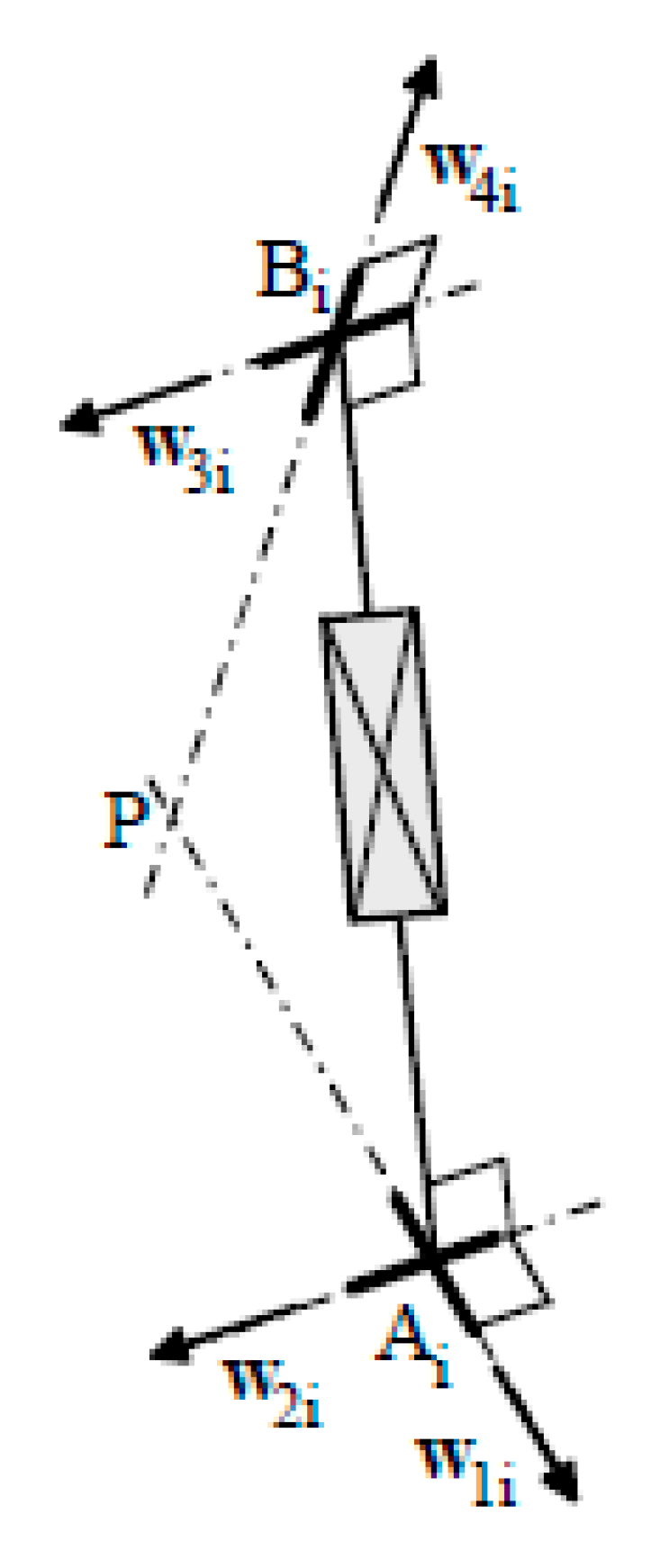
- in each UPU limb, the four R-pairs are numbered with an index, j, that increases by moving from the base toward the platform;
- -
- wji, for j = 1, …, 4, is the j-th R-pair axis’ unit vector of the i-th UPU limb, i = 1, 2, 3;
- -
- w2i and w3i are perpendicular to the axis of the i-th limb (i.e., the line through Ai and Bi), for i = 1, 2, 3.
- -
- θji, for j = 1, …,4, is the angular joint variable, counterclockwise with respect to wji, of the j-th R-pair of the i-th UPU limb, i = 1, 2, 3;
- -
- di = |Bi − Ai| is the linear joint variable of the P-pair (hereafter named “limb length”) of the i-th UPU limb, i = 1, 2, 3;
- -
- p = (P − O); bi = (Bi − O) = p + b0i with b0i = (Bi − P), for i = 1, 2, 3;
- -
- ai = (Ai − O), for i = 1, 2, 3; ci = (b0i − ai) for i = 1, 2, 3; gi = (bi − ai)/di for i = 1, 2, 3;
- -
- ri = w1i × w2i for i = 1, 2, 3; hi = w3i × w4i for i = 1, 2, 3; ni = [(bi − ai)⋅ri] hi for i = 1, 2, 3.
3. Translational 3-UTU
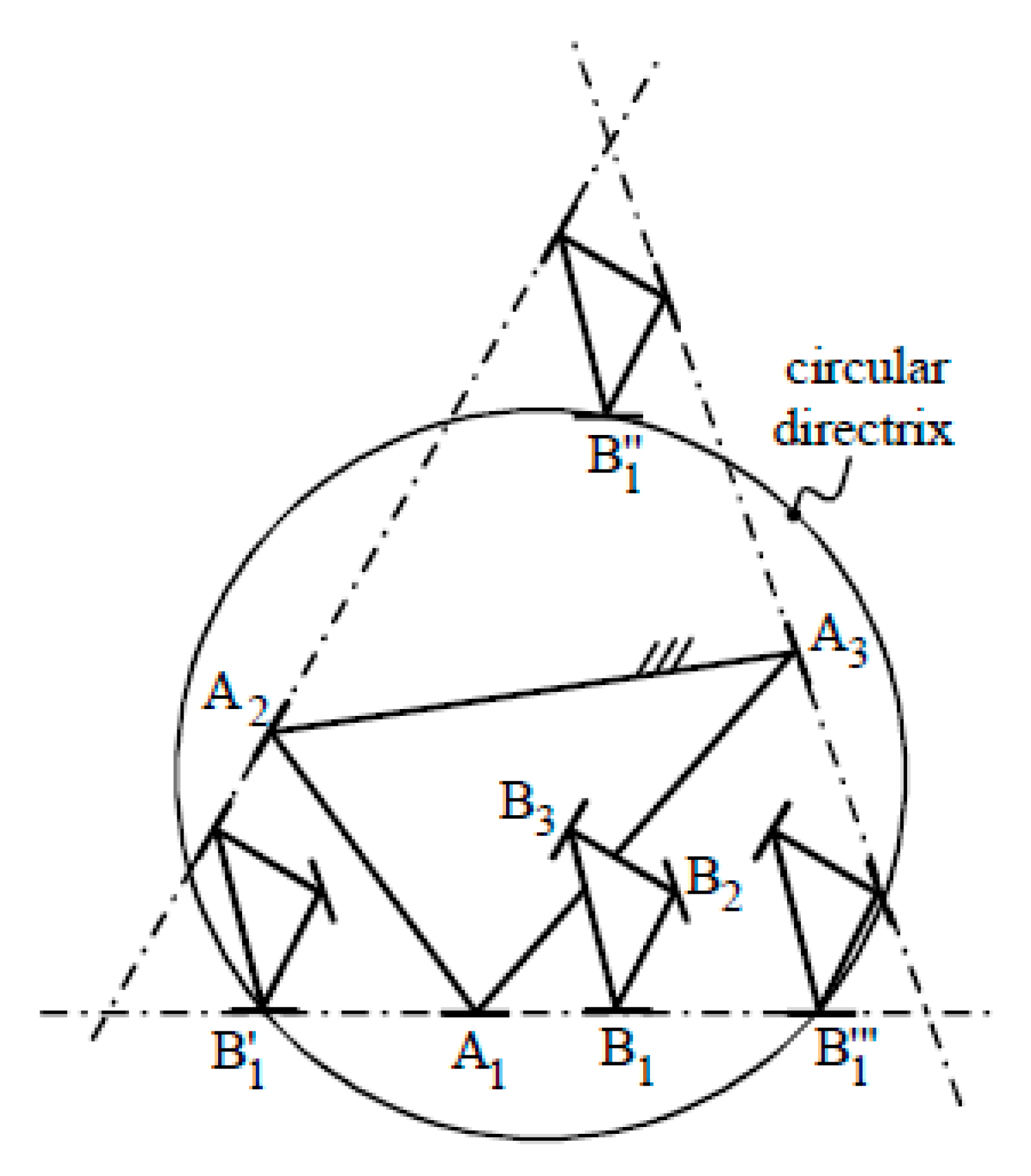
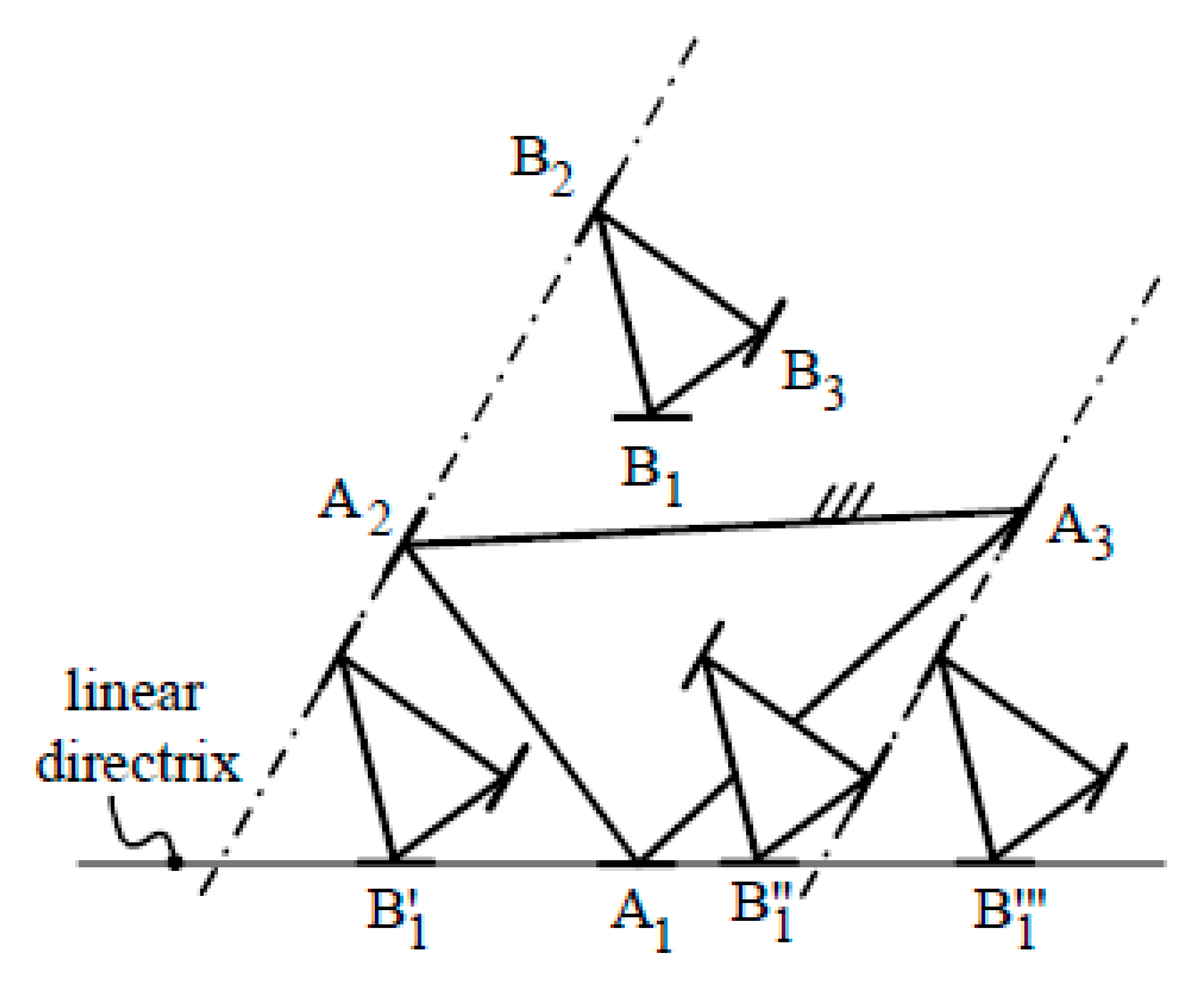
3.1. Rotation (Constraint) Singularities
+ {[(c2 × w12) × (c3 × w13)] ⋅ p} + (w11 ⋅ p) {[(w13 ⋅ p)w13 − (w12 ⋅ p)w12 − (c3 × w13) + c2 × w12] × w11} ⋅ p +
− (w11 ⋅ p) (w12 ⋅ p) (w13 ⋅ p) [(w12 × w13) ⋅ w11] + (w11 ⋅ p) (w12 ⋅ p) [w12 × (c3 × w13)] ⋅ w11 +
+ (w11 ⋅ p) (w13 ⋅ p) [(c2 × w12) × w13] ⋅ w11 – (w11 ⋅ p) [(c2 × w12) × (c3 × w13)] ⋅ w11 − {[(w13 ⋅ p)w13 +
− (w12 ⋅ p)w12 − (c3 × w13) + c2 × w12] × (c1 × w11)} ⋅ p + (w12 ⋅ p) (w13 ⋅ p) [(w12 × w13) ⋅ (c1 × w11)] +
− (w12 ⋅ p) {[w12 × (c3 × w13)] ⋅ (c1 × w11)} − (w13 ⋅ p) {[(c2 × w12) × w13] ⋅ (c1 × w11)} +
+ [(c2 × w12) × (c3 × w13)] ⋅ (c1 × w11) = 0.
3.2. Translation Singularities
4. 3-UTU Wrist
4.1. Translation (Constraint) Singularities
4.2. Rotation Singularities
5. Reconfigurable and Structurally Singular 3-6UTUs
6. Conclusions
Funding
Conflicts of Interest
References
- Hunt, K.H. Kinematic Geometry of Mechanisms; Clarendon Press: Oxford, UK, 1990. [Google Scholar]
- Tsai, L.W. Kinematics of a Three-dof Platform with Three Extensible Limbs. In Recent Advances in Robot Kinematics; Lenarcic, J., Parenti-Castelli, V., Eds.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996; pp. 401–410. ISBN 978-94-010-7269-4. [Google Scholar]
- Bonev, I.; Zlatanov, D. The Mystery of the Singular SNU Translational Parallel Robot. ParalleMIC-The Parallel Mechanisms Information Center, (http://www.parallemic.org) 12 June 2001. Available online: https://www.parallemic.org/Reviews/Review004.html (accessed on 18 October 2019).
- Han, C.; Kim, J.; Kim, J.; Park, F.C. Kinematic sensitivity analysis of the 3-UPU parallel mechanism. Mech. Mach. Theory 2002, 37, 787–798. [Google Scholar] [CrossRef]
- Walter, D.R.; Husty, M.L.; Pfurner, M. A complete kinematic analysis of the SNU 3-UPU parallel robot. In Interactions of Classical and Numerical Algebraic Geometry; Bates, D.J., Besana, G.M., Di Rocco, S., Wampler, C.W., Eds.; Contemporary Mathematics; AMS: Providence, RI, USA, 2009; Volume 496, pp. 331–346. ISBN 978-0-8218-4746-6. [Google Scholar]
- Zlatanov, D.; Bonev, I.A.; Gosselin, C.M. Constraint singularities of parallel mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 496–502. [Google Scholar] [CrossRef]
- Joshi, S.A.; Tsai, L.W. Jacobian analysis of limited-DOF parallel manipulators. ASME J. Mech. Des. 2002, 124, 254–258. [Google Scholar] [CrossRef]
- Wolf, A.; Shoham, M.; Park, F.C. Investigation of singularities and self-motions of the 3-UPU robot. In Advances in Robot Kinematics; Lenaric, J., Thomas, F., Eds.; Kluwer: Norwell, MA, USA, 2002; pp. 165–174. ISBN 978-90-481-6054-9. [Google Scholar]
- Liu, G.; Lou, Y.; Li, Z. Singularities of Parallel Manipulators: A Geometric Treatment. IEEE Trans. Rob. Autom. 2003, 19, 579–594. [Google Scholar] [CrossRef]
- Di Gregorio, R.; Parenti-Castelli, V. A Translational 3-DOF Parallel Manipulator. In Advances in Robot Kinematics: Analysis and Control; Lenarcic, J., Husty, M.L., Eds.; Kluwer: Norwell, MA, USA, 1998; pp. 49–58. ISBN 978-90-481-5066-3. [Google Scholar]
- Di Gregorio, R.; Parenti-Castelli, V. Influence of the geometric parameters of the 3–UPU parallel mechanism on the singularity loci. In Proceedings of the International Workshop on Parallel Kinematic Machines (PKM’99), Milan, Italy, 30 November 1999; pp. 79–86, ISBN 88-900426-0-5. [Google Scholar]
- Di Gregorio, R.; Parenti-Castelli, V. Mobility analysis of the 3–UPU parallel mechanism assembled for a pure translational motion. ASME J. Mech. Des. 2002, 124, 259–264. [Google Scholar] [CrossRef]
- Parenti-Castelli, V.; Bubani, F. Singularity loci and dimensional design of a translational 3-dof fully-parallel manipulator. In Advances in Multibody Systems and Mechatronics; Kecskemeéthy, A., Schneider, M., Woernle, C., Eds.; Technische Universität Graz. Institut für Mechanik und Getriebelehre: Duisburg, Germany, 1999; pp. 319–331. ISBN 9783950110807. [Google Scholar]
- Parenti-Castelli, V.; Di Gregorio, R.; Bubani, F. Workspace and Optimal Design of a Pure Translational Parallel Manipulator. Meccanica 2000, 35, 203–214. [Google Scholar] [CrossRef]
- Di Gregorio, R.; Parenti-Castelli, V. Benefits of twisting the legs in the 3-UPU Tsai mechanism. In Proceedings of the Year 2000 Parallel Kinematic Machines International Conference, Ann Arbor, MI, USA, 13–15 September 2000; pp. 201–211. [Google Scholar]
- Di Gregorio, R.; Parenti-Castelli, V. A New Approach for the evaluation of kinematic and static performances of a family of 3-UPU translational manipulators. In Romansy 16: Robot Design, Dynamics, and Control; Zielińska, T., Zieliński, C., Eds.; Springer: Vienna, Austria, 2006; pp. 47–54. ISBN 978-3-211-36064-4. [Google Scholar]
- Bhutani, G.; Dwarakanath, T.A. Practical feasibility of a high-precision 3-UPU parallel mechanism. Robotica 2014, 32, 341–355. [Google Scholar] [CrossRef]
- Bhutani, G.; Dwarakanath, T.A. Novel design solution to high precision 3 axes translational parallel mechanism. Mech. Mach. Theory 2014, 75, 118–130. [Google Scholar] [CrossRef]
- Karouia, M.; Hervé, J.M. A three-dof tripod for generating spherical rotation. In Advances in Robot Kinematics; Lenarcic, J., Stanisic, M.M., Eds.; Springer: Dordrecht, The Netherlands, 2000; pp. 396–402. ISBN 978-94-010-5803-2. [Google Scholar]
- Di Gregorio, R. Kinematics of the 3-UPU wrist. Mech. Mach. Theory 2003, 38, 253–263. [Google Scholar] [CrossRef]
- Di Gregorio, R. Statics and singularity loci of the 3-UPU wrist. IEEE Trans. Robot. 2004, 20, 630–635. [Google Scholar] [CrossRef]
- Ashith Shyam, R.B.; Ghosal, A. Path planning of a 3-UPU wrist manipulator for sun tracking in central receiver tower systems. Mech. Mach. Theory 2018, 119, 130–141. [Google Scholar] [CrossRef]
- Huda, S.; Takeda, Y. Kinematic analysis and synthesis of a 3-URU pure rotational parallel mechanism with respect to singularity and workspace. J. Adv. Mech. Des. Syst. Manuf. 2007, 1, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Huda, S.; Takeda, Y. Kinematic Design of 3-URU Pure Rotational Parallel Mechanism with Consideration of Uncompensatable Error. J. Adv. Mech. Des. Syst. Manuf. 2008, 2, 874–886. [Google Scholar] [CrossRef] [Green Version]
- Zlatanov, D.; Bonev, I.A.; Gosselin, C.M. Constraint Singularities as C-Space Singularities. In Advances in Robot Kinematics: Theory and Applications; Lenarčič, J., Thomas, F., Eds.; Springer: Dordrecht, The Netherlands, 2002; pp. 183–192. ISBN 978-90-481-6054-9. [Google Scholar]
- Carbonari, L.; Corinaldi, D.; Palpacelli, M.; Palmieri, G.; Callegari, M. A Novel Reconfigurable 3-URU Parallel Platform. In Advances in Service and Industrial Robotics; Ferraresi, C., Quaglia, G., Eds.; Springer: Dordrecht, The Netherlands, 2018; pp. 63–73. ISBN 978-3-319-61275-1. [Google Scholar]
- Sarabandi, S.; Grosch, P.; Porta, J.M.; Thomas, F. A Reconfigurable Asymmetric 3-UPU Parallel Robot. In Proceedings of the 2018 International Conference on Reconfigurable Mechanisms and Robots (ReMAR2018), Deft, The Netherlands, 20–22 June 2018; pp. 2–9. [Google Scholar]
- Hervé, J.M. The lie group of rigid body displacements, a fundamental tool for mechanism design. Mech. Mach. Theory 1999, 34, 719–730. [Google Scholar] [CrossRef]
- Zhao, T.S.; Dai, J.S.; Huang, Z. Geometric Analysis of Overconstrained Parallel Manipulators with Three and Four Degrees of Freedom. JSME Int. J. Ser. C 2002, 45, 730–740. [Google Scholar] [CrossRef] [Green Version]
- Zhao, T.S.; Li, Y.W.; Chen, J.; Wang, J.C. Novel Four-DOF Parallel Manipulator Mechanism and Its Kinematics. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics (RAM 2006), Bangkok, Thailand, 1–3 June 2006. [Google Scholar] [CrossRef]
- Solazzi, M.; Gabardi, M.; Frisoli, A.; Bergamasco, M. Kinematics Analysis and Singularity Loci of a 4-UPU Parallel Manipulator. In Advances in Robot Kinematics; Lenarcic, J., Khatib, O., Eds.; Springer: Cham, Switzerland, 2014; pp. 467–474. ISBN 978-3-319-06698-1. [Google Scholar]
- Coste, M.; Demdah, K.M. Extra Modes of Operation and Self-Motions in Manipulators Designed for Schoenflies Motion. ASME J. Mech. Rob. 2015, 7, 041020. [Google Scholar] [CrossRef]
- Miao, Z.; Yao, Y.; Kong, X. A rolling 3-UPU parallel mechanism. Front. Mech. Eng. 2013, 8, 340–349. [Google Scholar] [CrossRef]
- Grosch, P.; Di Gregorio, R.; Thomas, F. Generation of under-actuated manipulators with non-holonomic joints from ordinary manipulators. ASME J. Mech. Rob. 2010, 2, 011005. [Google Scholar] [CrossRef] [Green Version]
- Roberson, R.E.; Schwertassek, R. Dynamics of Multibody Systems; Springer: New York, NY, USA, 1988; p. 77. ISBN 978-3-642-86466-7. [Google Scholar]
- Palpacelli, M.; Carbonari, L.; Palmieri, G.; Callegari, M. Design of a Lockable Spherical Joint for a Reconfigurable 3-URU Parallel Platform. Robotics 2018, 7, 42. [Google Scholar] [CrossRef] [Green Version]
| 1 | According to [1], here, we use the term “limb connectivity” to denote the DOF number the platform would have if it were connected to the base only through that limb. |
| 2 | Hereafter, U, S, R, and P stand for universal joint, spherical pair, revolute pair, and prismatic pair, respectively. Also, the underscore denotes an actuated kinematic pair. |
| 3 | Parallel wrists (PWs) are PMs in which the relative motion between platform and base can only be a spherical motion with a fixed center. |
| 4 | Since this coefficient has no effect on the value of ω when it is different from zero, the value of ω as this coefficient goes to zero is unchanged. Therefore, the zeroing of this coefficient does not affect the angular velocity of the platform and does not identify a rotation (constraint) singularity. |
| 5 | Indeed, in this case, all the intersections among the cross-links’ planes are lines parallel to the unit vectors w1i (w4i). |
| 6 | In TPMs, the coordinates of a platform point are sufficient to identify the platform pose in the operational space since the platform translates with respect to the base. |
| 7 | Note that, in a TPM, the above-defined vectors ci (= b0i − ai), i = 1, 2, 3, are constant vectors since the platform translates. |







© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Gregorio, R. A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type. Robotics 2020, 9, 5. https://doi.org/10.3390/robotics9010005
Di Gregorio R. A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type. Robotics. 2020; 9(1):5. https://doi.org/10.3390/robotics9010005
Chicago/Turabian StyleDi Gregorio, Raffaele. 2020. "A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type" Robotics 9, no. 1: 5. https://doi.org/10.3390/robotics9010005
APA StyleDi Gregorio, R. (2020). A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type. Robotics, 9(1), 5. https://doi.org/10.3390/robotics9010005