1. Introduction
In the context of location Based Services (LBS), positioning technology refers to the use of various types of positioning technologies to obtain the current location of the positioning device. Given the importance of positioning systems in people’s lives, our aim is to improve the effectiveness of the positioning systems in positioning accuracy. With the increase in the number of people traveling, location-based services (LBS), and the multiple applications of computer-aided technology, positioning technology has stimulated a lot of research. Among the positioning methods, wireless fingerprinting has been proven to be effective due to its simplicity and practicality [
1]. With the popularization of long-term evolution (LTE) signals, it is possible to use wireless signals for large-scale outdoor positioning by measuring signal features [
2]. Therefore, the purpose of this paper is to design a positioning system using LTE networks.
Initially, positioning systems can be classified into two categories: distance-based positioning technology and distance-independent positioning technology. The distance-based positioning system determines the position of the user equipment (UE) according to the time of arrival (TOA) or time difference of arrival (TDOA) of the signal. However, the high synchronization requirements of different devices make these positioning systems impractical [
3]. For a distance-independent system, there is no need for distance calculation; it only uses anchor node information during the positioning stage. However, some of the positioning systems require a massive number of manually added anchor nodes and so are impractical for large-scale outdoor positioning. Other positioning systems can leverage existing infrastructure, such as LTE base stations (BSs) or Wi-Fi access points, for positioning, and so can be used for large-scale outdoor positioning [
4]. Among them, signal-based fingerprint positioning is one of the most popular technologies of recent years.
Signal-based fingerprint positioning technology has numerous advantages over distance-based methods. First, most fingerprint-based technologies do not require additional hardware or infrastructure. The main requirement for this technology is a fingerprint collector, such as a smartphone or signal receiver. Second, it can be applied to large-scale LBS. Finally, it draws less energy from the UE [
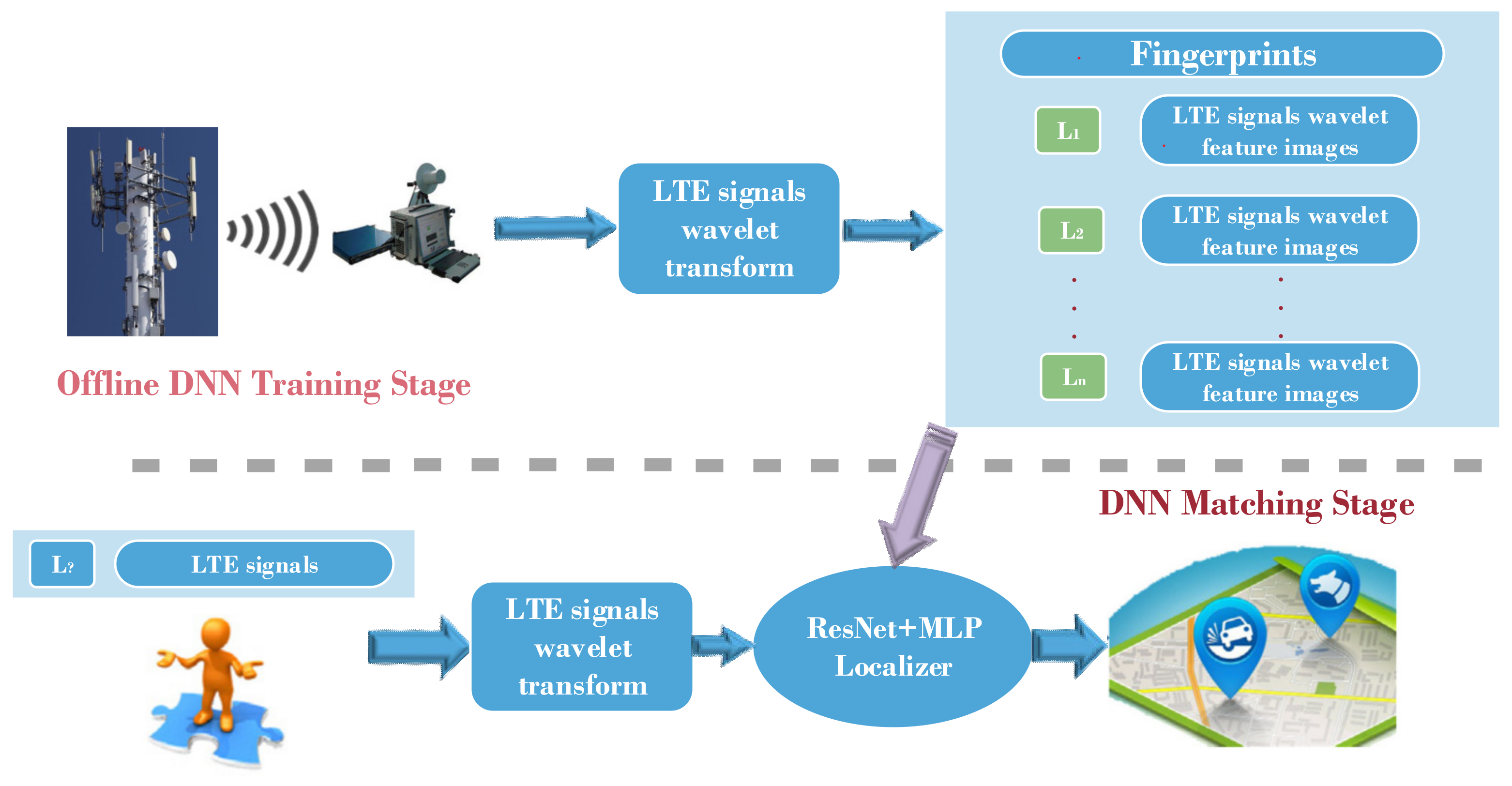
5]. The features of environmental signals are matched as signatures with predefined geotag signatures. Based on fingerprint positioning, we apply them to outdoor environments. Fingerprint-based positioning technology includes an offline training stage and an online matching stage. As shown in
Figure 1, in the offline stage, the geotag signal features of the LTE BS are collected. Then wavelet transform is used to convert the LTE signal to wavelet feature images to build a fingerprint database of places of interest. In the matching stage, the captured signal wavelet feature image is matched with the fingerprint database to determine the location of UE [
6].
The fingerprint-based initial positioning technique relies on k-nearest neighbor (KNN) [
7], weighted k-nearest neighbor (WKNN) [
8], Bayesian filtering, and support vector machine (SVM) [
9]. However, these shallow models have limited learning capabilities and poor positioning accuracy. With the popularization of neural networks (NNs), researchers have proposed backpropagation neural networks (BPNNs) [
10] and radial basis function neural networks (RBFNNs) [
11] to improve the positioning accuracy. Moreover, using a method based on multiple hops will achieve accurate positioning in outdoor environments [
12].
However, the main problem with fingerprint-based precise positioning technology comes from signal fluctuations, such as multipath fading or signal propagation being blocked by trees, buildings, or moving cars [
5]. These adverse factors will lead to poor positioning accuracy. Considering the principle and positioning process of the fingerprint positioning system, to maximize positioning accuracy, the problem to be solved in this paper is how to extract LTE signal features, and how to develop a classifier with powerful learning abilities. To extract reliable signal features, the wavelet transform method is used to calculate the wavelet feature coefficient and uses the wavelet coefficient feature images to store the extracted signal wavelet features. To extract high-value features from large amounts of data, the human information processing mechanism proposes using a multilayer deep learning algorithm to deal with this problem [
13]. It has been shown that DNN models can extract and learn high-level features whenever we feed them with a large-scale dataset, especially in the fields of computer vision and feature fusion [
14]. However, the technique of using deep neural networks (DNN) to implement computer vision based on LTE signals for outdoor positioning has not been perfected. Aiming at this problem, an LTE signal fingerprint positioning technique is proposed based on wavelet transform and deep learning. The area of interest is classified into dozens or hundreds of grids, and each grid is treated as one category. Therefore, the positioning issue is transformed into a classification issue. To solve the aforementioned problems, the ideas of deep learning, transfer learning, and wavelet analysis were leveraged to achieve high-precision outdoor positioning. After building the wavelet image fingerprint dataset, first, we randomized it, then used the first 60% of the dataset as the training set, the middle 20% of the database as the validation set, and the last 20% of the dataset as the test set. The results of the test set were used to indicate the positioning accuracy. In offline training, an improved deep residual network (ResNet) containing multiple residual units and multilayer perceptron (MLP) was used. After completing the training, a ResNet-based rough locator can be obtained. Furthermore, inspired by the idea of transfer learning, the MLP-based fine locator uses prior knowledge gained from ResNet to achieve higher-level positioning performance. This method has several advantages. First, ResNet can learn high-value features from a massive number of LTE signals with large fluctuations. Second, the DNN-based location predictor is more robust because it uses the trained ResNet information to predict the position. Also, the positioning system proposed in this paper can handle large-scale LTE signal datasets. The prediction at the matching stage does not require any search in the sample space, only the forward evaluation of the trained DNN. The proposed positioning system is shown in
Figure 1.
The main contributions of this manuscript can be summarized as follows:
A new method for constructing a fingerprint database using wavelet signal feature images is proposed. Based on the ideas of deep learning, transfer learning, and wavelet transform, a positioning system was designed to provide high-precision positioning services.
The proposed positioning system utilizes a hierarchical structure to fully learn the high-value features of the fingerprint database. And the DNN architecture consists of two positioning algorithms, namely ResNet and MLP. These two algorithms form rough locator and fine locator.
Aiming at the problem of many fingerprint classification points, a variety of data enhancement methods were adopted to increase the diversity of fingerprint databases.
The analysis of real data demonstrates that the positioning system leads to satisfactory positioning accuracy in outdoor environments. Therefore, compared with other positioning methods, the advantages of this article are: extracting more refined wavelet features as fingerprints, designing a deep neural network with powerful learning abilities, and using a variety of data enhancement methods to enhance the robustness of the models.
The rest of this paper is arranged as follows.
Section 2 introduces the signal-based positioning techniques.
Section 3 briefly introduces the proposed positioning system architecture. Signal wavelet transform is introduced in
Section 4.
Section 5 and
Section 6 provide detailed introductions to the DNN training module and the DNN positioning module.
Section 6 describes how the experimental campaign was set and conducted. Finally, the conclusions and future works are described in
Section 7.
2. Related Work
Positioning technology can be classified into two types: infrastructure-free techniques and infrastructure-based techniques [
15]. The infrastructure-free approach is to use existing LTE, Wi-Fi, FM, geomagnetic signals, and Global System for Mobile Communications (GSM) facilities to achieve positioning. The infrastructure-based approach focuses on dedicated devices such as channel receivers, infrared, RFID, and Bluetooth to locate people [
16]. The fingerprint-based positioning system used in this work belongs to infrastructure-free technique.
The fingerprint positioning method is considered for localization as it requires no additional expensive infrastructure. Fingerprint positioning methods rely on existing infrastructure and determine the UE position by matching the UE’s wavelet feature images against the prerecorded fingerprint database. The fingerprint database contains LTE signal wavelet feature images collected from LTE BS at reference points (RP).
KNN/WKNN is proposed to realize fingerprint positioning, but these shallow models show mediocre learning ability, so they cannot achieve satisfactory positioning accuracy [
17]. A positioning system based on Bayesian filtering is proposed to further enhance the robustness of positioning performance. With the development of neural networks (NN), many scholars leverage NN, BPNN, RBFNN, and GRNN to develop positioning systems. However, similar to the above methods, the positioning effect of these positioning methods is still not ideal, especially under the propagation of the signal NLOS [
18]. The proposed positioning model has excellent learning ability and the principle of fingerprint positioning makes it possible to overcome the influence of NLOS to a large extent, which leading to satisfactory positioning performance.
A common way to build a fingerprint database is to collect signal fingerprints on multiple RPs. The workload of fingerprint collection is cumbersome, and time-consuming, especially when measuring large outdoor areas [
1,
5]. To lower the workload, autonomous robots equipped with multiple sensors can independently explore areas of interest and collect fingerprints. This method is expensive; therefore, it is not practical [
19]. Another method of collecting a fingerprint database is the crowdsourcing method, which relies on volunteers to take part in fingerprint collection voluntarily. However, it takes days or even a week to obtain a well-structured fingerprint dataset covering an entire building or a large outdoor environment. Therefore, the upgrade of the fingerprint database by the crowdsourcing method is time-consuming and difficult [
20]. In this paper, we used signal collector to collect LTE signal in multiple pre-divided grids, and it requires a bit workload.
Other studies use enhanced sensors, such as accelerometers and compasses, along with RSSI, RSRP, or RSRQ information, to improve positioning accuracy. However, these sensors are still not widely equipped with UEs. Scanning these measurements will bring energy to the UE battery [
21]. The proposed positioning system use the wavelet image as the fingerprint feature, and it does not use much energy when constructing the wavelet images.
To solve the above positioning problem, we used ubiquitous LTE signals for positioning. This paper introduces a deep learning method that learns high-value features from massive widely fluctuating LTE signal data and automatically realizes the probability of position estimation. However, it still requires labor-intensive signal acquisition.
In this article, we adopt a hierarchical structure. Firstly, a ResNet rough locator is introduced to realize coarse position estimation. Then, a new MLP fine locator and wavelet feature fingerprint image set are used for training. Therefore, we have obtained an MLP-based fine positioner and higher positioning accuracy.
3. Definitions and Problem Statement
Signal fingerprint-based positioning technique captures signals that are matched against a series of pre-defined geotagged signal feature to determine the UE position. In this work, the signal was transformed into wavelet feature images, therefore, the pre-defined geotagged feature lies in the wavelet feature image. A two-dimensional area was considered for the positioning service. The whole positioning area is covered by LTE signal. We consider the downlink positioning technique based on downlink LTE signal transmitted from LTE base stations.
The fingerprint-based positioning technique consist of two stages: offline DNN training stage and online matching stage. During the offline DNN training stage, the positioning area is divided into a series of known grid , where represents the 2-dimensional Cartesian coordinate of location . LTE signal is collected in each grid, and then converted into wavelet feature image to construct fingerprint database. The wavelet image sample at each grid is denoted as , where represent the number of wavelet image in each grid. Then the DNN is trained on the fingerprint database to obtain the positioning model. During online matching stage, a collector at an unknown position to collect LTE signals which is converted into wavelet images for positioning. The problem is that the LTE signal is unstable, which means there are some differences in LTE signals collected at different times in the same place. The instability of LTE signals poses challenges for positioning. Besides, the numerous classification categories make it difficult to distinguish different signal features.
4. The Positioning System Architecture
This paper focuses on the problem of designing a signal fingerprint-based outdoor positioning system with high accuracy. LTE signals, wavelet transform, and deep learning algorithms were used to design the positioning system. Machine learning algorithms are often used to solve classification problems. In this paper, we converted the positioning problem into classification problem. Specifically, we divided the positioning area into multiple grids, and we treat each grid as a category. Then we collect LTE signals in each grid. Since the signals collected in each grid are different, we use deep learning algorithms to distinguish the signals of different grids and complete the classification task.
4.1. Overview of Positioning System
As shown in
Figure 1 and
Figure 2, the signal fingerprint-based positioning system consisted of the following steps: LTE signal collection, wavelet feature extraction, fingerprint database construction, DNN offline training, and DNN online matching. Specifically, a typical LTE positioning environment was used that consisted of connected LTE BSs and wireless sensor-equipped devices that receive LTE signals from the LTE BS. The LTE signal collection equipment used in this paper was universal software-defined wireless peripheral (USRP). BSs usually cover a certain area, so we could determine the area we are in by determining the nearest BS. Considering the DNN has made great contributions in the field of image classification and the advantages of wavelet analysis in signal processing, the LTE signal was converted to a wavelet feature image to construct a fingerprint database, and then we used DNN to train the fingerprint image dataset. When positioning using probabilistic methods, the grid size can affect the positioning accuracy. Therefore, to achieve satisfactory positioning accuracy, the grid division cannot be too large. Additionally, the LTE signals collected in each grid were converted into 100 wavelet feature images to construct the fingerprint database. After the fingerprint database was established, DNN was used to complete the remaining positioning process. This is mainly composed of an offline training phase and an online matching phase.
4.2. Offline DNN Training Stage
During the offline DNN training stage, the first task is to collect LTE signals. Then we convert the LTE signals into fingerprint images dataset. The fingerprint dataset includes 73 categories, each category contains 100 fingerprint images. When using DNN for training, we divided the fingerprint database into 60% training dataset, 20% validation dataset and 20% test dataset. Test dataset is used as the criterion for positioning accuracy. The DNN module consisted of the ResNet module and MLP module. A rough locator based on ResNet was trained on the preprocessed fingerprint image database. Moreover, to improve the robustness of the system, a variety of data enhancement methods, such as random crop and random rotation, were used. For optimization, on the basis of the pretrained ResNet, we used the transfer learning method to improve it, and designed an MLP-based fine locator. Additionally, we used the cross-entropy loss, dynamically adjusting the learning rate to overcome the overfitting problem.
4.3. Online Matching Stage
During the online matching stage, first, the UE is used to collect LTE signals and then convert it into wavelet images as the input of DNN model for positioning. The method of constructing wavelet images needs to be consistent with the offline stage. The matching stage consisted of a rough locator based on ResNet and a fine locator based on MLP. After ResNet training, we could get more representative LTE signal features. Refinement was achieved by training with pretrained ResNet through MLP. The outputs of the rough locator and the fine locator were the correct probability of the grid position.
It is known that LTE BS signal coverage is limited. A signal collected at a certain location mainly comes from one serving BS. After building the fingerprint database, first, we classified the fingerprint database into several subfingerprints according to the different serving BS. Then we used the proposed DNN model to train the divided subfingerprint database separately, and finally estimated the positioning accuracy. How large an area the method can be applied to in the context of this problem depends on the LTE signal coverage area.
5. Signal Wavelet Transform Introduction
Wavelet transform is advantageous for describing the local information of the signal time‒frequency. Wavelet can get valuable information from the signal, so it is also called a “mathematical microscope” [
22]. In this paper, continuous wavelet transform is used to process the signal and obtain the signal feature map under different scale conditions.
Expanding the function
in
space under the wavelet basis can be called the continuous wavelet transform of function
[
22]; it can be expressed as follows:
At a certain scale , the wavelet transform coefficient of arbitrary function at time shift point essentially means: at position , time contains frequency components within a frequency window with a bandwidth of and a center frequency of .
After continuous wavelet transform, the return coefficient matrix
is as follows:
Since
is a discrete signal, it can be represented by
. For a specific scale
, the wavelet transform will calculate each coefficient value
, corresponding from 1 to
[
23].
After the wavelet analysis of the signal, the wavelet coefficient matrix feature image can be used to store the coefficient matrix information. When conducting experiments, we divided the signals collected in each grid into 100 equal subsignals. Then wavelet transform was used to calculate the coefficient matrix
of each subsignal. After calculating the coefficient matrix, it will be converted into a wavelet feature image. Wavelet transforms each subsignal and uses wavelet feature image to store the wavelet features of the signal. In other words, the wavelet feature image stores the numerical information of the wavelet feature matrix. In the DNN training process, these data in coefficient matrix are the features learned by the DNN. One of the wavelet coefficient feature images generated in the experiment is shown in
Figure 3.
6. DNN Training Module
Different training methods have a considerable impact on the performance of DNN. In this paper, the collected fingerprint dataset was randomly transformed, and 60%, 20%, and 20% of the dataset were used as the training set, validation set, and test set, respectively. As shown in
Figure 4, during the continuous training of the network, the accuracy of the training set continued to increase, which showed that the network was constantly performing feature learning. The test set first increased, and when overfitting occurred, the test accuracy began to decline. Therefore, we adopted the method of full training and retained the best test module to solve the overfitting problem. When using DNN for training, we evaluated the test accuracy of each training epoch and retained the best DNN test module as the final module. The DNN training module contained a ResNet model and an MLP-based transfer learning model. Although the construction methods of these two models were different, their training methods were the same. Both of these models took the wavelet fingerprint image database as input. When using DNN for training, we first used 60% of the data in the database for training, and the other 20% as the validation set. Every training epoch, an accuracy test was performed on the validation set. We fully trained the DNN model and paid attention to the accuracy of the validation set during the training process. If, after 15 consecutive trainings, the accuracy of the verification set no longer improved, we stopped the DNN training, retained the model parameters, and performed accuracy testing on the test set. The test accuracy of the test set was used as the final positioning accuracy.
Generally speaking, the more data, the higher the recognition accuracy. To reduce the workload of collecting data, another method to increase data diversity based on the original data is data enhancement [
24]. By enlarging and randomly rotating the original image [
3], data enhancement could be achieved. When dealing with image recognition and classification problems, to make the model better extract features, first, the size of the image is usually standardized to 224 × 224. Second, we enlarged the picture by 1.25 times, and then randomly rotated the original image by 15°. It is worth mentioning that if the size of the image is too small, the information in the image will be lost. On the contrary, the information may not be fully utilized, and the amount of calculation will be greater. By using these techniques, the richness and diversity of the wavelet fingerprint image dataset could be improved. To accelerate the convergence rate of DNN, a momentum term was added to ResNet. To make the DNN converge to the global lowest point, we dynamically adjusted the learning rate. After every 40 training epochs, the learning rate was halved.
Transfer learning has many advantages. First, it can improve the performance of the DNN model. Second, due to using the method of extracting feature vectors for transfer learning, the training cost in the later stage is very low [
25]. The basic idea of transfer learning can be classified into two types: First, by preserving the parameters of the pretrained model, we take out a part of the network or the whole pretrained model, then add a new model after the network, and finally use it to train with the dataset. The second is to extract the feature vectors of the trained model, and then use a new module to train the extracted features [
26]. In this article, we adopted the first method for feature learning.
7. DNN Positioning Module
The proposed rough locator based on ResNet consisted of multiple residual network modules and two hidden layers of MLP. Inspired by the idea of transfer learning, a new MLP with multiple hidden layers was leveraged to further learn high-value features of the wavelet fingerprint database and gain more accurate positioning accuracy. This section introduces the ResNet, MLP algorithm and positioning module.
Deep Residual Network Introduction
The convolutional neural network (CNN) has made a great contribution to the field of image classification. Recent studies have shown that the depth of neural networks has a crucial influence on the classification results. The network models that have achieved good results on the ImageNet dataset all use deep neural network models. However, as the depth of the network increases, the problem of gradient dispersion appears [
27]. This is because the network is too deep and the gradient cannot be effectively propagated. Therefore, as the network deepens, the image recognition rate will first increase and then decrease. A deep residual network solves this problem using the residual module.
Assume the function of the target neural network fits
, and the stacked nonlinear network is fitted with
. The original mapping is
. The hypothesis is that
is very complex, neural networks cannot effectively extract reliable features, and the residual module
is much easier. The residual module consists of two parts: linear mapping,
, and nonlinear mapping,
. If the direct linear mapping
can achieve the best performance, the residual module will change the nonlinear mapping
to 0. The deep residual network consists of multiple residual modules [
28]. The residual module is shown in
Figure 5.
As shown in
Figure 6, ResNet shifts the learning problem to residual mapping. To facilitate the neural network and update the gradient, ResNet builds multiple direct paths between these blocks. Therefore, the layer of the upper residual block can directly transfer the gradient information to the layer of the lower residual block.
As shown in
Figure 7, the ResNet used in this paper consists of one basic residual block 1, four basic residual blocks 2, three basic residual blocks 3, an average pooling layer, and an MLP. These three basic blocks are composed of convolution 2D, batch normalization, ReLU activation function, max-pooling layer, and downsample layer. Moreover, each basic residual block can be considered as a residual block. When gradient propagation problems occur in network training, the network can skip these basic modules to continue training by using quick connections.
The convolution layer was used to extract the local region features of the neuron in the previous layer. In the proposed ResNet model, the convolution layer of basic residual blocks 1, 2, and 3 contain (3, 3), (1, 1), and (1, 1) zero padding, respectively. The batch normalization layer converts the distribution of the input values of the neural network into a normal distribution, making the model more robust. The ReLU activation function was used to process the input gradient information of the previous layer.
Usually, to enhance the modeling ability of CNN, it is necessary to add several fully connected layers (MLP). Then, we used the SELU function as the activation function of MLP. Finally, the Softmax classifier is used to give location prediction results. When optimizing the performance of DNN, the gradient parameters are updated by cross-entropy loss. The calculation process of the specific parameters of each layer can be obtained from [
29].
In general, the definition of transfer learning is to apply the knowledge or model obtained in a field to different but related fields [
30].
Figure 8 shows the schematic diagram of deep neural network-based transfer learning. It can be implemented as follows: First, we used training datasets for network training in the source domain. Secondly, part of the pretrained network in the source domain was transformed into a part of the new network in the target domain. It is worth mentioning that, when training the transfer learning model, the pretraining network model parameters remained unchanged, and only the parameters of the newly added model were updated [
25].
This paper will use transfer learning to further optimize the rough locator. The idea of transfer learning is embodied in utilizing the information obtained from the pretrained model and applying the knowledge to the new custom MLP.
Specifically, as shown in
Figure 9, first, fingerprint wavelet feature images were used for the ResNet proposed in this paper. After the training was completed, we picked the best performing model, and retained all parameters of the pretrained ResNet. In the source domain, part of the pretrained ResNet was transferred to the target domain, MLP was newly added, and part of the pretrained ResNet was combined into a new model. The transfer learning method used the prior knowledge of the pretrained model to find the pattern between the real position and the predicted information, thereby predicting the user position. By using a new model based on transfer learning as a fine locator, better positioning accuracy will be achieved.
In this paper, we needed to select an appropriate standard to evaluate the model, so we needed to calculate the positioning accuracy. When calculating the positioning accuracy, the positioning model first estimated the position of each sample in the test set, and then compared the estimated position with the correct position. Therefore, the positioning accuracy could be obtained as follows:
where
is the number of correctly predicted samples in the test set and
is the total number of samples in the test set.
8. Fingerprint Classification
The proposed positioning technique transforms the positioning issue into a classification issue. Therefore, the system will predivide the region of interest into hundreds of grids as classification categories. The size of the grid will affect the classification accuracy. A small grid will cause poor classification performance, while an oversized grid will lose the significance of positioning. Therefore, the grid size is set to 15 × 15 m.
In this study, we randomly chose several sampling points in each grid and used a device to collect the LTE signal. Then, the collected original LTE signals were divided into different classification points according to the preset grid.
9. Experiments and Evaluation
To test the practicality of the positioning system proposed in this paper, we implemented an experiment in a real outdoor environment, which contains various scenarios.
Figure 10 shows the whole experimental area. The aerial pictures come from the Baidu map. We do not need the true location of LTE BSs. Considering the diversity of the scene, the experimental scenario is suitable for evaluating the proposed positioning system.
We selected 15 × 15 m as the grid size. Inspired by [
31], we adopted a similar signal collection method. When collecting the original LTE signal information, all experimental areas were classified into dozens of grids, and we held a USRP device to walk around each predivided grid to collect signal measurement values. The USRP connected to the antenna was controlled by a notebook computer and used to output baseband data. In each grid, we randomly selected five sampling points, then collected 30 s of LTE signal at each sampling point. Finally, wavelet transform was used to convert the signals collected in each grid into 100 wavelet feature images. The number of grids in this experiment is 73. Therefore, there were 7300 wavelet feature images in the fingerprint database.
The positioning system was implemented on a Dell PC with a RTX2060 graphics card; compared with the other platform, this has powerful data processing capabilities. The data processing, model design, and data enhancement techniques were conducted in PyTorch. The wavelet transform process was realized in MATLAB. The key parameters in the positioning algorithm based on DNN were evaluated and compared with the most advanced positioning method.
9.1. Influence of MLP-Based Transfer Learning
In this experiment, the performance of the rough and fine locator was evaluated. We conducted each experiment 3–5 times and recorded the accuracy of each experiment, and finally picked the best performing model. Initial Lr is an important hyperparameter on CNN that can greatly affect network performance. Therefore, we compared its impact on the rough and fine locators. As seen in
Figure 11, the positioning performance of the fine locator based on transfer learning is generally better than the rough locator based on ResNet. The large initial Lr leads to the low positioning accuracy of the two models. This is because the network model cannot effectively converge during training and results in a higher loss value. A small Lr will cause the locator to effectively converge to a local minimum, thereby enhancing the performance of the network. Therefore, based on the experiment results,
was picked as the initial Lr.
9.2. Influence of Different Activation Functions
The activation function can convert the linear input of the previous neural network into a nonlinear output, which can enhance the network’s expressive ability and prevent overfitting. Commonly used activation functions are sigmoid, Tanh, ReLU, leaky ReLU, and SELU. When neural networks started to appear, the sigmoid activation function was the most popular. However, it often has a problem with gradient disappearance, and its computational complexity is high. The Tanh activation function is used to solve the problem of the sigmoid. At present, the ReLU function is the most representative activation function. It has the advantage of increasing the nonlinearity of the network and preventing the gradient from disappearing. However, it has a dead ReLU problem: some neurons cannot be activated, which makes the gradient unable to propagate through these neurons. The use of leaky relays further solves the relay problem. Finally, a SELU activation function with high stability is proposed. As shown in
Figure 12, since the SELU activation function has good modeling ability, the positioning performance is the best. In most cases, fine locators based on transfer learning perform better than rough locators.
9.3. Influence of the Number of Hidden Layers on the MLP
The different number of hidden layers will undoubtedly have a significant impact on the network performance.
Figure 13 shows that, with the deepening of MLP, the image recognition accuracy continues to decrease, and the corresponding positioning accuracy continues to decline. This shows that deepening the network does not necessarily enhance the network performance. This is because too deep a network causes an overfitting problem.
9.4. Influence of Different Batch Sizes on the Model Performance
The size of the batch size determines the time required to complete each epoch during the training process and the smoothness of the gradient between each epoch. The choice of batch size determines the direction of the network gradient descent. Increasing the batch size within a reasonable range will improve memory utilization. Excessive batch size will increase training time and affect model performance. As shown in
Figure 14, 32 was picked as the proper model batch size. As can be seen from
Figure 10,
Figure 11,
Figure 12 and
Figure 13, in most cases, the fine locator based on transfer learning has better positioning accuracy than the rough locator. However, when some parameters are not set properly, their performance will be reduced.
9.5. Performance Comparison
Several classical algorithms were used for comparison to prove the superiority of the positioning model proposed in this paper. Many positioning technologies based on SVM GRNN, and MLP algorithms use RSSI as a feature for positioning [
10,
14,
15]. To compare the positioning performance between the commonly used methods and our proposed method, the collected LTE signal was used to calculate RSSI as the input of the SVM, GRNN, and MLP algorithm and proposed wavelet feature fingerprint image dataset as the input CNN, rough locator, and fine locator. For the multiclass SVM, the Gaussian function is used as the kernel function, and the kernel scale was set to sqrt (P)/4, where P is the number of categories. For the GRNN algorithm, the smoothing factor was set to 2. Furthermore, for the SVM and GRNN algorithms, 80% of the data in the fingerprint database were used for training, and the remaining data were used to evaluate the performance of the model. The MLP model contains three hidden layers, and each of them contains 200 neurons. It is worth mentioning that these comparison algorithms were implanted on Matbal 2019a. As can be seen in
Figure 15, compared with other learning algorithms, the localization performance of the algorithm in this paper affords superior performance. This is because models such as SVM and GRNN, are relatively simple in structure and cannot map features in high-dimensional space well; therefore, they have a limited learning ability. Additionally, the RSSI feature is relatively rough—not as refined as wavelet features. The positioning accuracy of the MLP locator is not ideal because it uses rough features and its fitting ability is not ideal. On the contrary, deep models such as CNN and the model proposed in this paper, because of their excellent learning ability, can extract high-value features and are superior to other algorithms. The reason why the accuracy of the CNN positioning algorithm is not optimal may be that it has experienced overfitting during training.
In order to prove that the use of wavelet features can improve the positioning accuracy, we directly used the raw signal data as the input of the DNN in this paper. After completing the signal collection, we divided the signals of each category into 100 segments on average and formed them into a 100-dimensional matrix. Then we randomly shuffled the row vectors of the matrix. Finally, 60%, 20%, and 20% of the data were used as the training set, validation set, and test set, respectively. Because it is a two-dimensional matrix, we can use the proposed DNN work directly with the signal.
Figure 16 shows that using wavelet feature fingerprints can effectively improve positioning performance. This is because, compared to the features contained in the raw signal, the signal wavelet features are more delicate and contain more reliable features.
10. Conclusions
An outdoor positioning system based on a wavelet feature fingerprint image and deep learning is proposed. By using the deep learning algorithm, it can find the location that best matches the location of the real UE from the fingerprint database. A new fingerprint representation method is proposed, which transforms LTE signals into wavelet images and uses the wavelet image to build a fingerprint database. Then, the constructed wavelet fingerprint dataset was used as the input of the DNN proposed in this paper to obtain satisfactory positioning performance. The proposed DNN has a two-level hierarchical structure, which contains a ResNet-based rough locator and an MLP-based fine locator. To overcome the instability of the LTE signal, we fully trained the proposed DNN and selected the model with the best performance. Moreover, data enhancement methods were leveraged to enrich the fingerprint database features. Finally, the experimental results indicated that the proposed positioning system achieved superior performance. Due to the high-quality fingerprint database and excellent learning algorithm, the performance of the positioning system was satisfactory compared to other advanced positioning methods. In a later work, we intend to enhance the processing techniques to reduce the need for processing power and simplify the processing methods. We also intend to optimize the system and apply it to the Internet of Things.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}