
Sustainable and Resilient Land Use Planning: A Multi-Objective Optimization Approach




Abstract
1. Introduction
1.1. Motivation
1.2. Contributions
1.3. Organization
2. Literature Review
2.1. Applications of Multi-Objective Optimization in Urban Planning
2.2. An Overview of Non-Dominated Sorting Genetic Algorithms
3. Materials and Methods
3.1. Study Area and Data
3.2. Multi-Objective Optimization
3.2.1. Objectives of the Multi-Objective Optimization Model
- Objective 1: Maximization of the economic objective
- Objective 2: Minimization of the carbon emission objective
- Objective 3: Maximization of the accessibility objective
- Objective 4: Maximization of the space syntax integration objective
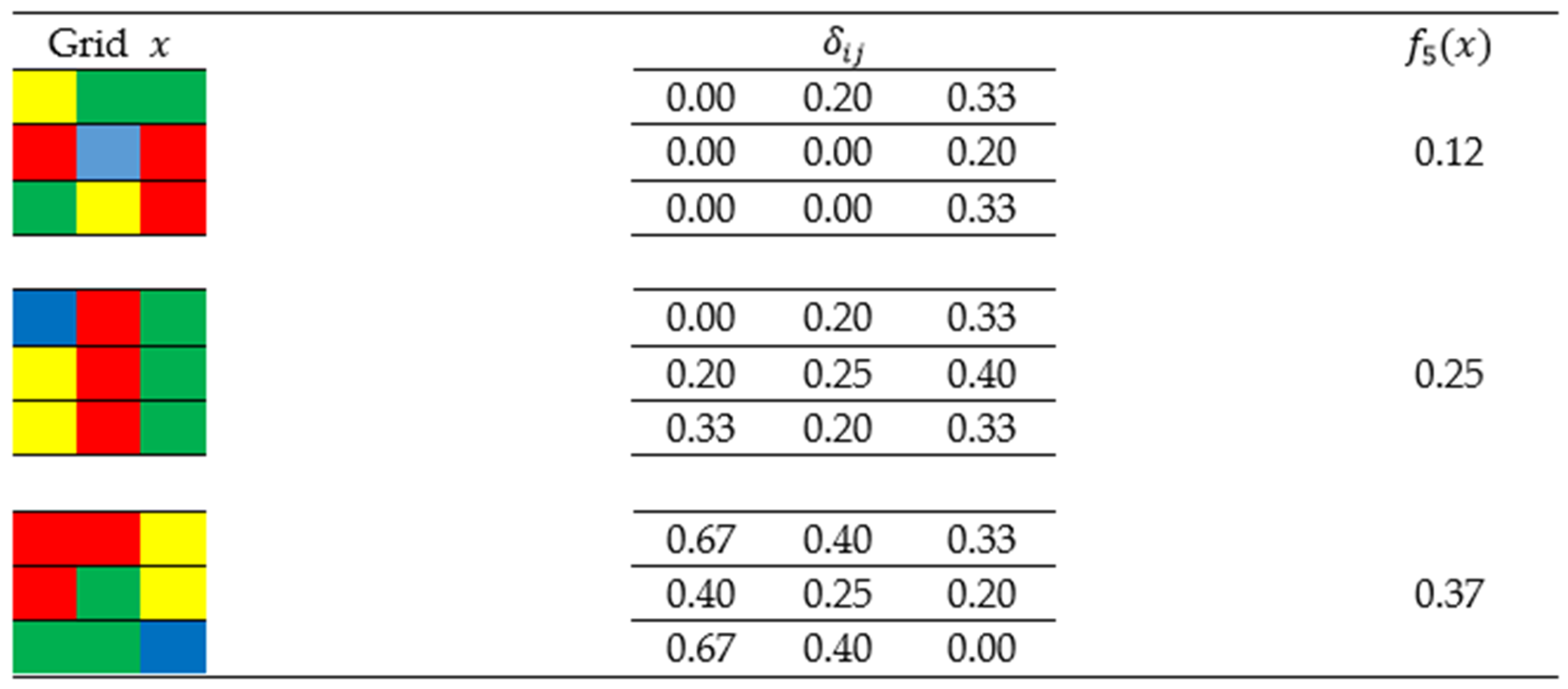
- Objective 5: Maximization of the compactness objective
3.2.2. Constraints
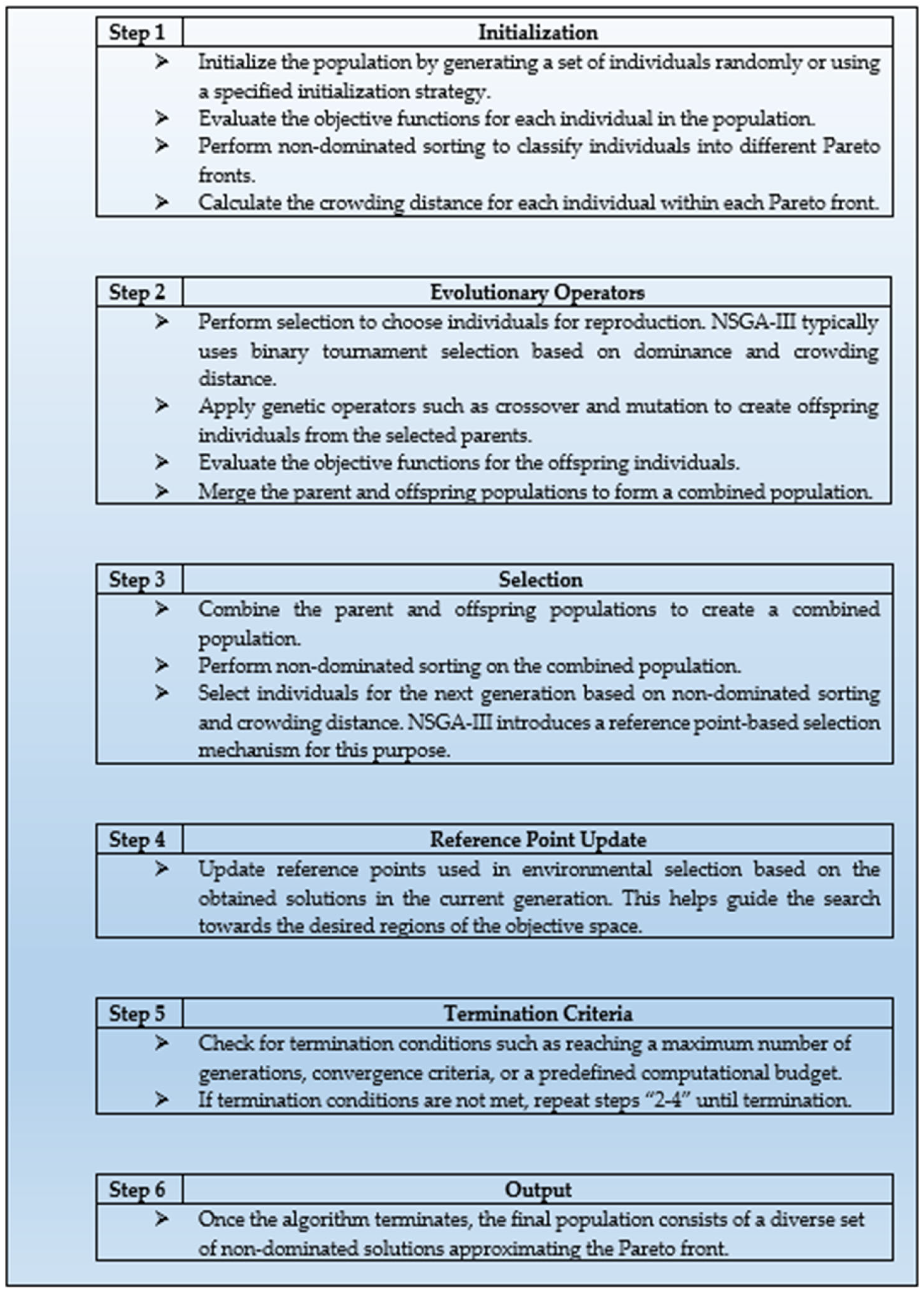
3.3. Improved NSGA-III
3.3.1. Constraint-Preserved Mutation Operation
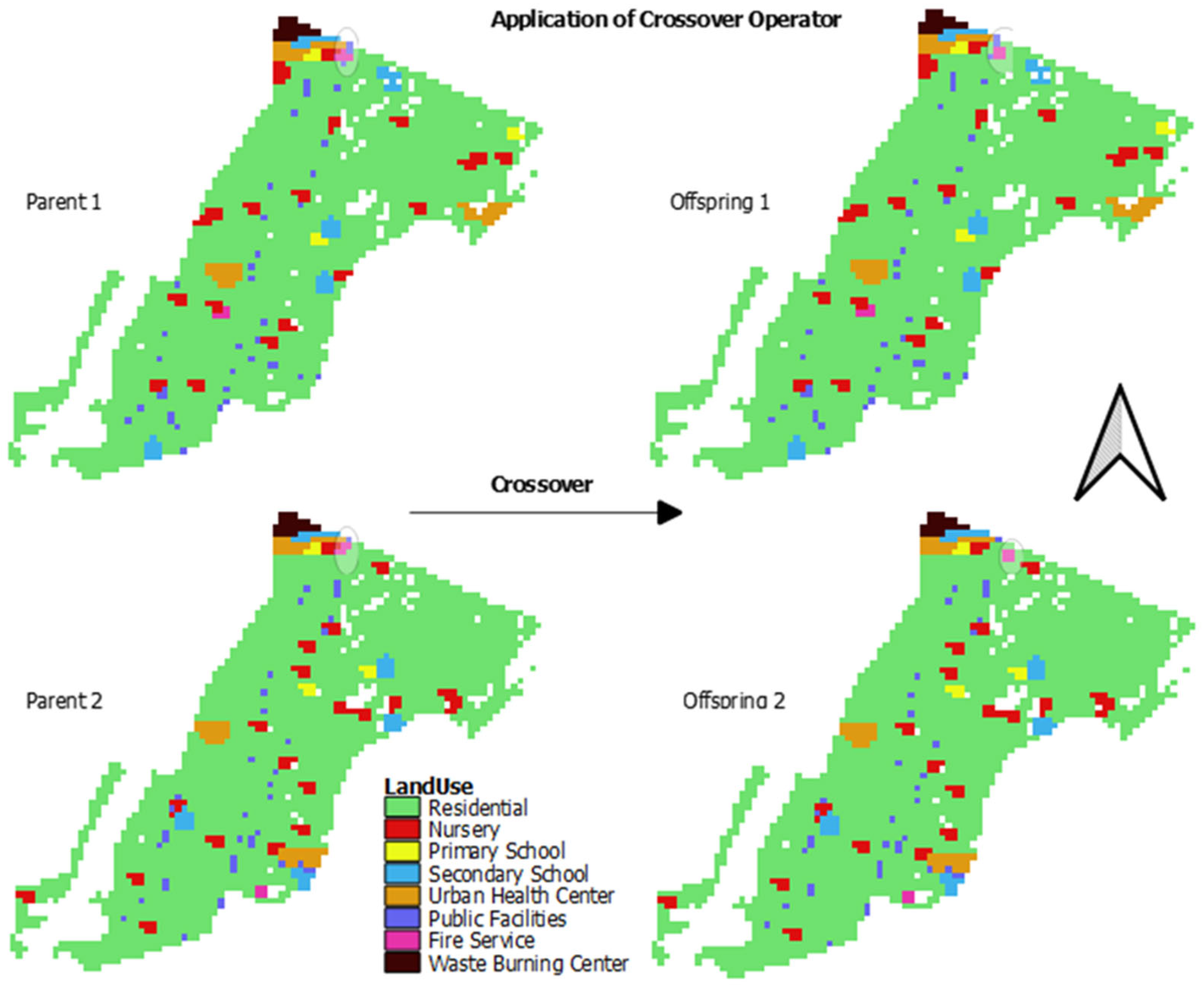
3.3.2. Constraint-Preserved Crossover Operation
4. Results
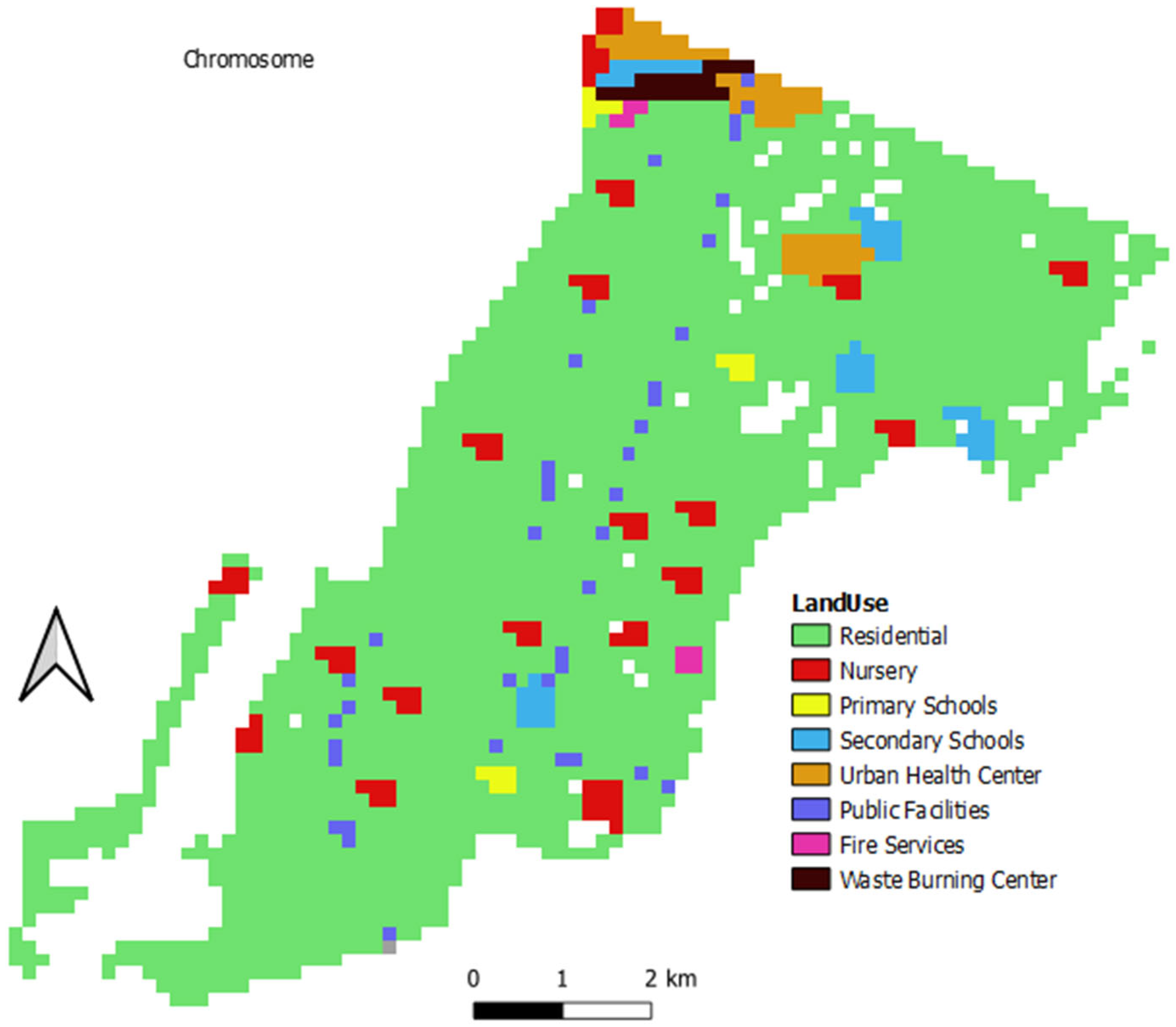
4.1. The Implementation of NSGA-III for Land Use Allocation
4.2. Convergence Analysis
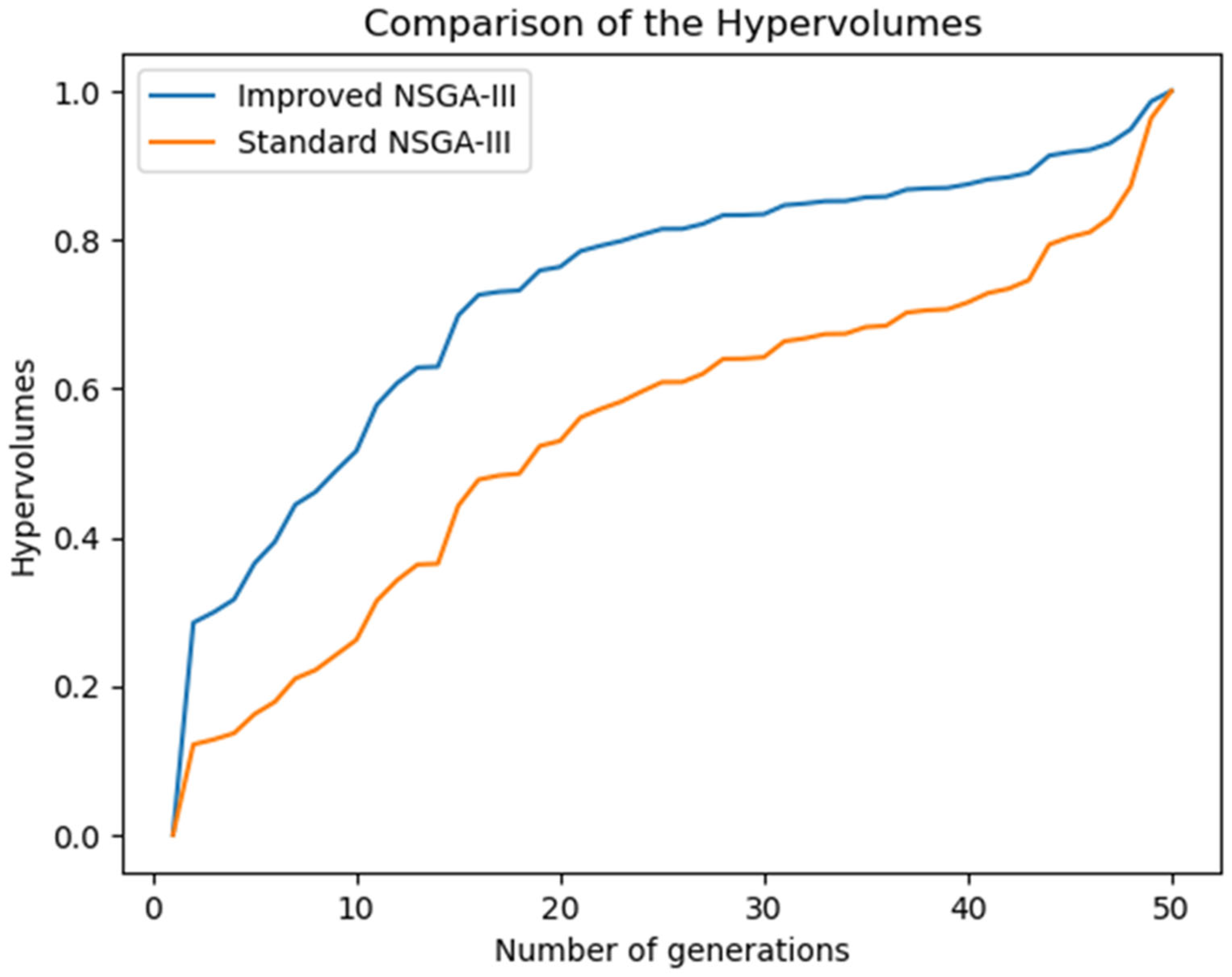
4.2.1. Hypervolume
4.2.2. Running Metric
4.2.3. Constraints Satisfaction
5. Discussion
5.1. Performance Comparison
5.2. Solution Diversity Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cao, K.; Huang, B.; Wang, S.; Lin, H. Sustainable land use optimization using Boundary-based Fast Genetic Algorithm. Comput. Environ. Urban Syst. 2012, 36, 257–269. [Google Scholar] [CrossRef]
- Haque, A.; Asami, Y. Optimizing urban land use allocation for planners and real estate developers. Comput. Environ. Urban Syst. 2014, 46, 57–69. [Google Scholar] [CrossRef]
- Vaggione, P. Urban Planning for City Leaders, 2nd ed.; UN-Habitat: Nairobi, Kenya, 2014. [Google Scholar]
- Huang, T.-W.; Kuo, H.-F.; Tsou, K.-W. A Multi-Objective Spatial Optimization Method for Land Use Allocation in High Flood Risk Areas. Int. J. Biosci. Biochem. Bioinform. 2013, 201–205. [Google Scholar] [CrossRef]
- Bruno, M.; Henderson, K.; Kim, H.M. Multi-Objective Optimization in Urban Design. In Proceedings of the 2011 Symposium on Simulation for Architecture and Urban Design, Boston, MA, USA, 4–7 April 2011. [Google Scholar]
- Liu, Z.; Yan, Y.; Qu, X.; Zhang, Y. Bus stop-skipping scheme with random travel time. Transp. Res. Part C Emerg. Technol. 2013, 35, 46–56. [Google Scholar] [CrossRef]
- Veldhuizen, D.A.V.; Lamont, G.B. Evolutionary Computation and Convergence to a Pareto Front. In Proceedings of the Late Breaking Papers at The Genetic Programming 1998 Conference, Madison, WI, USA, 22–25 July 1998. [Google Scholar]
- Serafini, P. Simulated Annealing for Multi Objective Optimization Problems. In Multiple Criteria Decision Making; Tzeng, G.H., Wang, H.F., Wen, U.P., Yu, P.L., Eds.; Springer: New York, NY, USA, 1994; pp. 283–292. [Google Scholar]
- Holland, J.H. Genetic Algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-dominated Sorting Genetic Algorithm for Multi-objective Optimization: NSGA-II. In Parallel Problem Solving from Nature PPSN VI; Schoenauer, M., Deb, K., Rudolph, G., Yao, X., Lutton, E., Merelo, J.J., Schwefel, H.-P., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 849–858. [Google Scholar]
- Srinivas, N.; Deb, K. Multiobjective Function Optimization Using Nondominated Sorting Genetic Algorithms; New Jersey Institute of Technology: New Jersey, NY, USA, 1995. [Google Scholar]
- Hobbie, J.G.; Gandomi, A.H.; Rahimi, I. A Comparison of Constraint Handling Techniques on NSGA-II. Arch. Comput. Methods Eng. 2021, 28, 3475–3490. [Google Scholar] [CrossRef]
- Bi, X.; Wang, C. An improved NSGA-III algorithm based on objective space decomposition for many-objective optimization. Soft Comput. 2017, 21, 4269–4296. [Google Scholar] [CrossRef]
- Jenkins, P. Urban management, urban poverty and urban governance: Planning and land management in Maputo. SAGE J. 2000, 12, 1. [Google Scholar] [CrossRef]
- Deb, K.; Sindhya, K.; Okabe, T. Self-adaptive simulated binary crossover for real-parameter optimization. In Proceedings of the 9th Annual Conference on Genetic and Evolutionary Computation, London, UK, 7–11 July 2007; pp. 1187–1194. [Google Scholar]
- Sahebgharani, A. Multi-Objective Land Use Optimization through Parallel Particle Swarm Algorithm: Case Study Baboldasht District of Isfahan, Iran. J. Urban Environ. Eng. 2016, 10, 42–49. [Google Scholar] [CrossRef]
- Liu, M.; Xi, J. Multi-Objective Optimization of the Spatial Structure and Layout of the Protected Area Based on Ecosystem Services: A Case Study of the Yellow River’s Headwaters Region in the Three-River-Source National Park. Chin. J. Urban Environ. Stud. 2021, 9, 2150016. [Google Scholar] [CrossRef]
- Medrano-García, J.D.; Ruiz-Femenia, R.; Caballero, J.A. Multi-objective optimization of combined synthesis gas reforming technologies. J. CO2 Util. 2017, 22, 355–373. [Google Scholar] [CrossRef]
- Zhao, X.; Tan, K.; Xie, P.; Chen, B.; Pu, J. Multiobjective Land-Use Optimization Allocation in Eucalyptus-Introduced Regions Based on the GMDP–ACO Model. J. Urban Plan. Dev. 2021, 147, 05021004. [Google Scholar] [CrossRef]
- Caparros-Midwood, D.; Barr, S.; Dawson, R. Optimised spatial planning to meet long term urban sustainability objectives. Comput. Environ. Urban Syst. 2015, 54, 154–164. [Google Scholar] [CrossRef]
- Ma, S.; He, J.; Liu, F. Land-use spatial optimization model based on particle swarm optimization. Geo-Spat. Inf. Sci. 2011, 14, 54–61. [Google Scholar] [CrossRef]
- She, L.; Wei, M.; You, X. Multi-objective layout optimization for sponge city by annealing algorithm and its environmental benefits analysis. Sustain. Cities Soc. 2021, 66, 102706. [Google Scholar] [CrossRef]
- Pan, T.; Su, F.; Yan, F.; Lyne, V.; Wang, Z.; Xu, L. Optimization of multi-objective multi-functional landuse zoning using a vector-based genetic algorithm. Cities 2023, 137, 104256. [Google Scholar] [CrossRef]
- Liu, K.; Xu, X.; Huang, W.; Zhang, R.; Kong, L.; Wang, X. A multi-objective optimization framework for designing urban block forms considering daylight, energy consumption, and photovoltaic energy potential. Build. Environ. 2023, 242, 110585. [Google Scholar] [CrossRef]
- Kirimtat, A.; Fatih Tasgetiren, M.; Krejcar, O.; Buyukdagli, O.; Maresova, P. A multi-objective optimization framework for functional arrangement in smart floating cities. Expert Syst. Appl. 2024, 237, 121476. [Google Scholar] [CrossRef]
- Meng, F.; Zhou, Z.; Zhang, P. Multi-Objective Optimization of Land Use in the Beijing–Tianjin–Hebei Region of China Based on the GMOP-PLUS Coupling Model. Sustainability 2023, 15, 3977. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, C.; Liu, Z.; Yin, D.; Jia, H.; Guan, Y. Spatial layout optimization of green infrastructure based on life-cycle multi-objective optimization algorithm and SWMM model. Resour. Conserv. Recycl. 2023, 191, 106906. [Google Scholar] [CrossRef]
- Yoon, E.J.; Kim, B.; Lee, D.K. Multi-objective planning model for urban greening based on optimization algorithms. Urban For. Urban Green. 2019, 40, 183–194. [Google Scholar] [CrossRef]
- Yang, S.; Ruangpan, L.; Torres, A.S.; Vojinovic, Z. Multi-objective Optimisation Framework for Assessment of Trade-Offs between Benefits and Co-benefits of Nature-based Solutions. Water Resour. Manag. 2023, 37, 2325–2345. [Google Scholar] [CrossRef]
- Wicki, S.; Schwaab, J.; Perhac, J.; Grêt-Regamey, A. Participatory multi-objective optimization for planning dense and green cities. J. Environ. Plan. Manag. 2021, 64, 2532–2551. [Google Scholar] [CrossRef]
- Wan, S.; Xu, L.; Qi, Q.; Yang, H.; Zhou, Y. Building a multi-objective optimization model for Sponge City projects. Urban Clim. 2022, 43, 101171. [Google Scholar] [CrossRef]
- Tregonning, G.; Barr, S.; Dawson, R.; Ranjan, R. A multi-objective spatial optimization framework for sustainable urban development. In Proceedings of the 2nd International Conference on Natural Hazards & Infrastructure, Chania, Greece, 23–26 June 2019. [Google Scholar]
- Showkatbakhsh, M.; Makki, M. Multi-Objective Optimisation of Urban Form: A Framework for Selecting the Optimal Solution. Buildings 2022, 12, 1473. [Google Scholar] [CrossRef]
- Schwaab, J.; Deb, K.; Goodman, E.; Kool, S.; Lautenbach, S.; Ryffel, A.; Van Strien, M.J.; Grêt-Regamey, A. Using multi-objective optimization to secure fertile soils across municipalities. Appl. Geogr. 2018, 97, 75–84. [Google Scholar] [CrossRef]
- Qi, J.; Ding, L.; Lim, S. Application of a decision-making framework for multi-objective optimisation of urban heat mitigation strategies. Urban Clim. 2023, 47, 101372. [Google Scholar] [CrossRef]
- Cao, K.; Liu, M.; Wang, S.; Liu, M.; Zhang, W.; Meng, Q.; Huang, B. Spatial Multi-Objective Land Use Optimization toward Livability Based on Boundary-Based Genetic Algorithm: A Case Study in Singapore. ISPRS Int. J. Geo-Inf. 2020, 9, 40. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A Comprehensive Review on NSGA-II for Multi-Objective Combinatorial Optimization Problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Tang, R.; Li, K.; Ding, W.; Wang, Y.; Zhou, H.; Fu, G. Reference Point Based Multi-Objective Optimization of Reservoir Operation: A Comparison of Three Algorithms. Water Resour. Manag. 2020, 34, 1005–1020. [Google Scholar] [CrossRef]
- Gu, Z.-M.; Wang, G.-G. Improving NSGA-III algorithms with information feedback models for large-scale many-objective optimization. Future Gener. Comput. Syst. 2020, 107, 49–69. [Google Scholar] [CrossRef]
- Jain, H.; Deb, K. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point Based Nondominated Sorting Approach, Part II: Handling Constraints and Extending to an Adaptive Approach. IEEE Trans. Evol. Comput. 2014, 18, 602–622. [Google Scholar] [CrossRef]
- Vesikar, Y.; Deb, K.; Blank, J. Reference Point Based NSGA-III for Preferred Solutions. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bengaluru, India, 18–21 November 2018; pp. 1587–1594. [Google Scholar]
- Vicente, E.M.; Jermy, C.A.; Schreiner, H.D. Urban Geology of Maputo, Mozambique. In Engeneering Geology of Tomorrow’s Cities; Geological Society: London, UK, 2009. [Google Scholar]
- Isaac, E. Test for Significance of Pearson’s Correlation Coefficient (r). Int. J. Innov. Math. Stat. Energy Policies 2018, 6, 11–23. [Google Scholar]
- Mulrow, J.; Machaj, K.; Deanes, J.; Derrible, S. The state of carbon footprint calculators: An evaluation of calculator design and user interaction features. Sustain. Prod. Consum. 2019, 18, 33–40. [Google Scholar] [CrossRef]
- The World Bank Group. Mozambique Urban Development and Decentralization Project; The World Bank: Maputo, Mozambique, 2020. [Google Scholar]
- Coello, C.A.C.; Lamont, G.B.; Veldhuizen, D.A.V. Evolutionary Algorithms for Solving Multi-Objective Problems, 2nd ed.; Springer: New York, NY, USA, 2007; p. 810. [Google Scholar]
- Mohammad, S.I.; Graham, D.J.; Melo, P.C.; Anderson, R.J. A meta-analysis of the impact of rail projects on land and property values. Transp. Res. Part A Policy Pract. 2013, 50, 158–170. [Google Scholar] [CrossRef]
- Gettelman, A.; Rood, R.B. Demystifying Climate Models; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Müller, D.B.; Liu, G.; Løvik, A.N.; Modaresi, R.; Pauliuk, S.; Steinhoff, F.S.; Brattebø, H. Carbon Emissions of Infrastructure Development. Environ. Sci. Technol. 2013, 47, 11739–11746. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z. China’s Carbon Emissions Report 2016; Harvard DASH: Cambridge, MA, USA, 2016. [Google Scholar]
- Evans, G. Accessibility, Urban Design and the Whole Journey Environment. Built Environ. 2009, 35, 366–385. [Google Scholar] [CrossRef]
- Koohsari, M.J.; Mavoa, S.; Villanueva, K.; Sugiyama, T.; Badland, H.; Kaczynski, A.T.; Owen, N.; Giles-Corti, B. Public open space, physical activity, urban design and public health: Concepts, methods and research agenda. Health Place 2015, 33, 75–82. [Google Scholar] [CrossRef]
- Jiang, B.; Claramunt, C.; Klarqvist, B. An integration of space syntax into GIS for modelling urban spaces. Int. J. Appl. Earth Obs. Geoinf. 2000, 2, 161–171. [Google Scholar] [CrossRef]
- Yamu, C.; Van Nes, A. An Integrated Modeling Approach Combining Multifractal Urban Planning with a Space Syntax Perspective. Urban Sci. 2017, 1, 37. [Google Scholar] [CrossRef]
- Burton, E. Measuring Urban Compactness in UK Towns and Cities. Environ. Plan. B Plan. Des. 2002, 29, 219–250. [Google Scholar] [CrossRef]
- Ben-Hamouche, M. Climate, cities and sustainability in the arabian region: Compactness as a new paradigm in urban design and planning. Int. J. Archit. Res. Archnet-IJAR 2008, 2, 241. [Google Scholar] [CrossRef]
- Bibri, S.E.; Krogstie, J.; Kärrholm, M. Compact city planning and development: Emerging practices and strategies for achieving the goals of sustainability. Dev. Built Environ. 2020, 4, 100021. [Google Scholar] [CrossRef]
- Emmerich, M.T.M.; Deutz, A.H. A tutorial on multiobjective optimization: Fundamentals and evolutionary methods. Nat. Comput. 2018, 17, 585–609. [Google Scholar] [CrossRef] [PubMed]
- Black, P.E.; Okun, V.; Yesha, Y. Mutation operators for specifications. In Proceedings of the ASE 2000, Fifteenth IEEE International Conference on Automated Software Engineering, Grenoble, France, 11–15 September 2000; pp. 81–88. [Google Scholar]
- Pavai, G.; Geetha, T.V. A Survey on Crossover Operators. ACM Comput. Surv. 2017, 49, 72. [Google Scholar] [CrossRef]
- Ari, N.; Ustazhanov, M. Matplotlib in python. In Proceedings of the 2014 11th International Conference on Electronics, Computer and Computation (ICECCO), Abuja, Nigeria, 29 September–1 October 2014; pp. 1–6. [Google Scholar]
- Guerreiro, A.P.; Fonseca, C.M.; Paquete, L. The Hypervolume Indicator: Problems and Algorithms. ACM Comput. Surv. 2022, 54, 119. [Google Scholar] [CrossRef]
- Blonder, B.; Lamanna, C.; Violle, C.; Enquist, B.J. The n-dimensional hypervolume: The n-dimensional hypervolume. Glob. Ecol. Biogeogr. 2014, 23, 595–609. [Google Scholar] [CrossRef]
- Zitzler, E.; Brockhoff, D.; Thiele, L. The Hypervolume Indicator Revisited: On the Design of Pareto-compliant Indicators Via Weighted Integration. In Evolutionary Multi-Criterion Optimization; Obayashi, S., Deb, K., Poloni, C., Hiroyasu, T., Murata, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 862–876. [Google Scholar]
- Blank, J.; Deb, K. A Running Performance Metric and Termination Criterion for Evaluating Evolutionary Multi- and Many-objective Optimization Algorithms. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Gupta, R.; Nanda, S.J. Solving time varying many-objective TSP with dynamic θ-NSGA-III algorithm. Appl. Soft Comput. 2022, 118, 108493. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Application | Objective Functions | Optimization Objective Approach | Optimization Methods | Spatial Data Type | Data Model | Study Area |
|---|---|---|---|---|---|---|---|
| [27] | Sustainable Urban Planning | Minimize investment cost, maximize economic–environmental–social monetarization benefits, Maximize ran off control capacity | Pareto front-based method | NSGA-II | Pipe network system data, Land use type, Rainfall monitoring data | Not identified | Beijing, China |
| [28] | Sustainable Urban Planning | Maximize cooling effect, Maximize connectivity, minimize cost | Pareto front-based method | NSGA-II | DEM | Raster | South Korea |
| [29] | Sustainable Urban Planning | Maximize urban flood reduction, maximize total benefits, minimize cost | Pareto front-based method | NSGA-II | Rainfall monitoring data | Not identified | Cul de Sac area on Sint Maarten Island |
| [30] | Sustainable Urban Planning | Minimize urban ecosystem service, minimize compactness | Pareto front-based method | NSGA-II | Land cover map, Leaf Area Index, Vegetation Height, DEM, Master Plan, Building floor plan | Raster | South of the Malayan Peninsula |
| [31] | Sustainable Urban Planning | Minimize the cost of the SPC project, minimize the inlet and outlet volume ratio, minimize the peak reduction ratio, maximize the peak delay ratio, maximize the landscape quality of the sponge facilities | Pareto front-based method | NSGA-II | Rainfall monitoring data, DEM | Raster | Middle school campus in Tongzhou District, Beijing |
| [32] | Sustainable and Resilient Urban Planning | Reducing urban sprawl, reducing risk from flood events, restricting greenspace development, reducing risk from heatwaves, prioritizing brownfield development, and improving public transport access | Pareto front-based method | Multi-objective spatial optimization | Urban sprawl, Flood zones, Land use, Heat waves, and Transport access | Raster | Greater Manchester |
| [33] | Sustainable Urban Planning | Solar gain, length, and distribution of spatial interventions, and volumetric mass of the spatial interventions | Pareto front-based method | Multi-objective evolutionary algorithms | Not identified | ||
| [22] | Sustainable and Resilient Urban Planning | Runoff reduction, pollution control, environmental benefits | Pareto front-based method | NSGA-II | Surface, Soil, Storage, Drain, and Pavement | Not identified | Northern China |
| [34] | Sustainable Urban Planning | Total edge length, loss of agricultural productivity | Pareto front-based method | NSGA-II | DEM, Land cover | Raster | Zürich, Switzerland |
| [35] | Sustainable Urban Planning | Minimum Tair and LST at 2 pm, minimum UTCI at 2 pm and daily HRM, and minimum daily EPL, daily EB, and IC | Weighted sum method | Genetic algorithm | Land cover | Raster | Greater Sydney region |
| [23] | Sustainable Urban Planning | Maximize the gray zones, maximize the green zones, and maximize the connectedness | Pareto front-based method | NSGA-II | Land cover | Raster | Shenzhen in China |
| [36] | Sustainable and Resilient Urban Planning | Carbon emission, ecological benefit, economic benefit, sustainable development | Weighted sum method | ANN | DEM, GDP, population, Land cover, precipitation, night light | Raster | Beijing–Tianjin–Hebei Region of China |
| [24] | Sustainable and Resilient Urban Planning | Energy consumption, photovoltaic energy potential, and sunlight hours | Pareto front-based method | Rhino & Grasshopper | Land cover | Raster | Jianhu City, China |
| [25] | Sustainable and Resilient Urban Planning | Scenery and walkability | Pareto front-based method | NSGA-II | Safety-index map | Not identified | York City |
| Code | Land Use | Number of Cells per Unit of Land Use | Number of Cells in the Map | Proportion | Land Use Value |
|---|---|---|---|---|---|
| 1 | Residential | 1 | 2055 | 87.52% | 859 MZM |
| 2 | Nursery | 5 | 100 | 4.26% | 5689 MZM |
| 3 | Primary schools | 5 | 15 | 0.64% | 13,813 MZM |
| 4 | Secondary schools | 10 | 50 | 2.13% | 27,640 MZM |
| 5 | Urban health center | 20 | 60 | 2.56% | 58,889 MZM |
| 6 | Public facilities | 1 | 40 | 1.70% | 1889 MZM |
| 7 | Fire services | 4 | 8 | 0.34% | 2889 MZM |
| 8 | Waste burning centers | 20 | 20 | 0.85% | 40,819 MZM |
| Total | 2348 | 100.00% | |||
| Land Use Types | Area for Each Unit | Weight of the Land Use () | Recommended Minimum Travel Distance | Weight of the Land Use Distance () | Average Value (Thousand MZM) | Maximum Capacity (Person) | Average Carbon Emission (Million Tons) |
|---|---|---|---|---|---|---|---|
| Residential | 500 m2 | 0.0028 | 0 m | 0 | 859 | 5 | 0.0210 |
| Nursery | 5000 m2 | 0.0283 | 800 m | 0.0298 | 5689 | 1000 | 0.0012 |
| Primary School | 12,140 m2 | 0.0686 | 800 m | 0.0298 | 13,813 | 1500 | 0.0018 |
| Secondary School | 24,300 m2 | 0.1373 | 1250 m | 0.0466 | 27,640 | 5000 | 0.0260 |
| Urban Health Center | 50,000 m2 | 0.2826 | 2500 m | 0.0931 | 58,889 | 25,000 | 0.0410 |
| Public Facilities | 25,000 m2 | 0.1413 | 3000 m | 0.1117 | 1889 | 500 | 0.0320 |
| Fire Service | 10,000 m2 | 0.0565 | 7500 m | 0.2793 | 2889 | 50 | 0.0220 |
| Waste Burning Center | 50,000 m2 | 0.2826 | 11,000 m | 0.4097 | 40,819 | 40 | 0.4000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sicuaio, T.; Zhao, P.; Pilesjo, P.; Shindyapin, A.; Mansourian, A. Sustainable and Resilient Land Use Planning: A Multi-Objective Optimization Approach. ISPRS Int. J. Geo-Inf. 2024, 13, 99. https://doi.org/10.3390/ijgi13030099
Sicuaio T, Zhao P, Pilesjo P, Shindyapin A, Mansourian A. Sustainable and Resilient Land Use Planning: A Multi-Objective Optimization Approach. ISPRS International Journal of Geo-Information. 2024; 13(3):99. https://doi.org/10.3390/ijgi13030099
Chicago/Turabian StyleSicuaio, Tomé, Pengxiang Zhao, Petter Pilesjo, Andrey Shindyapin, and Ali Mansourian. 2024. "Sustainable and Resilient Land Use Planning: A Multi-Objective Optimization Approach" ISPRS International Journal of Geo-Information 13, no. 3: 99. https://doi.org/10.3390/ijgi13030099
APA StyleSicuaio, T., Zhao, P., Pilesjo, P., Shindyapin, A., & Mansourian, A. (2024). Sustainable and Resilient Land Use Planning: A Multi-Objective Optimization Approach. ISPRS International Journal of Geo-Information, 13(3), 99. https://doi.org/10.3390/ijgi13030099