
Agronomic and Technical Evaluation of Herbicide Spot Spraying in Maize Based on High-Resolution Aerial Weed Maps—An On-Farm Trial
 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Sites
2.2. Experimental Design and Treatments
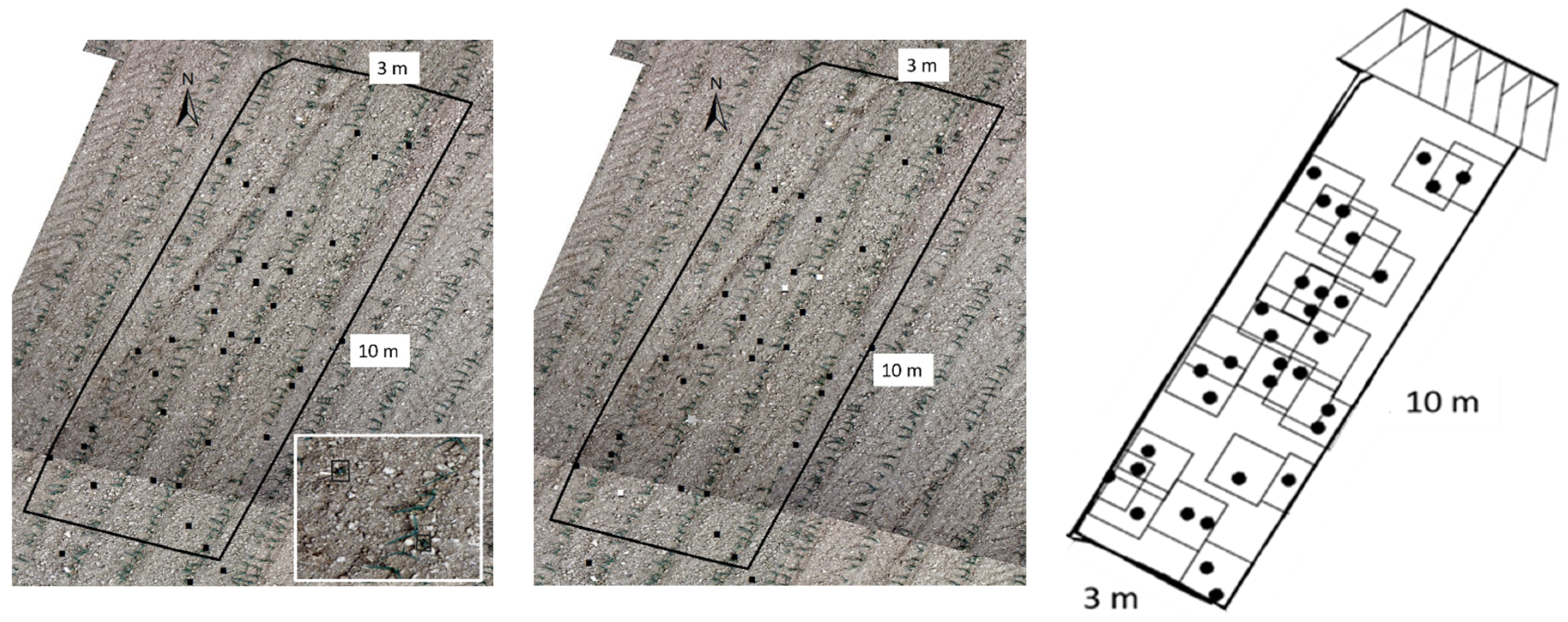
2.3. UAV Imaging and Weed Detection
2.4. Assessments and Data Analysis
3. Results
3.1. Accuracy of the Weed Classification in UAV Images
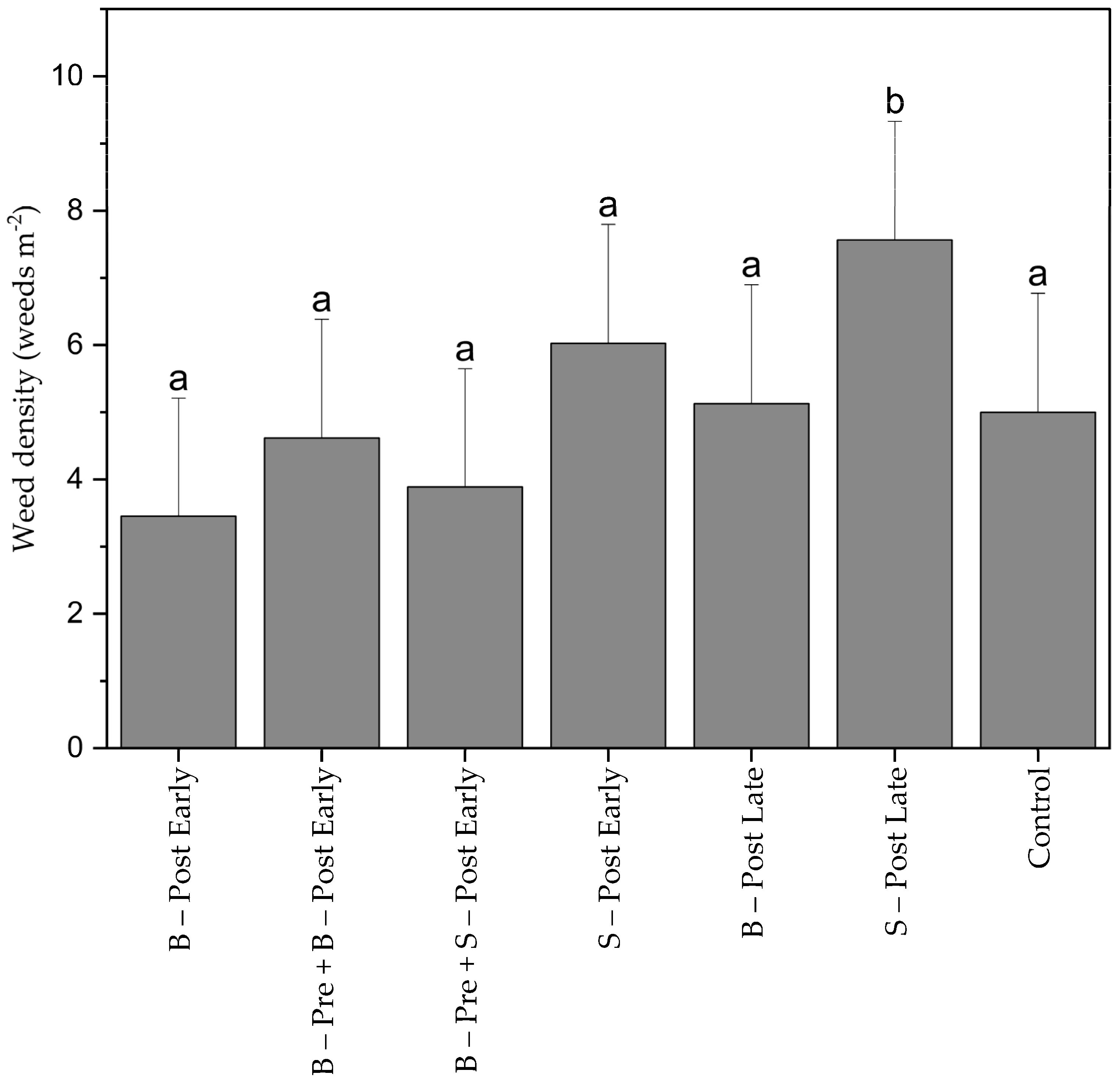
3.2. Weed and Crop Densities
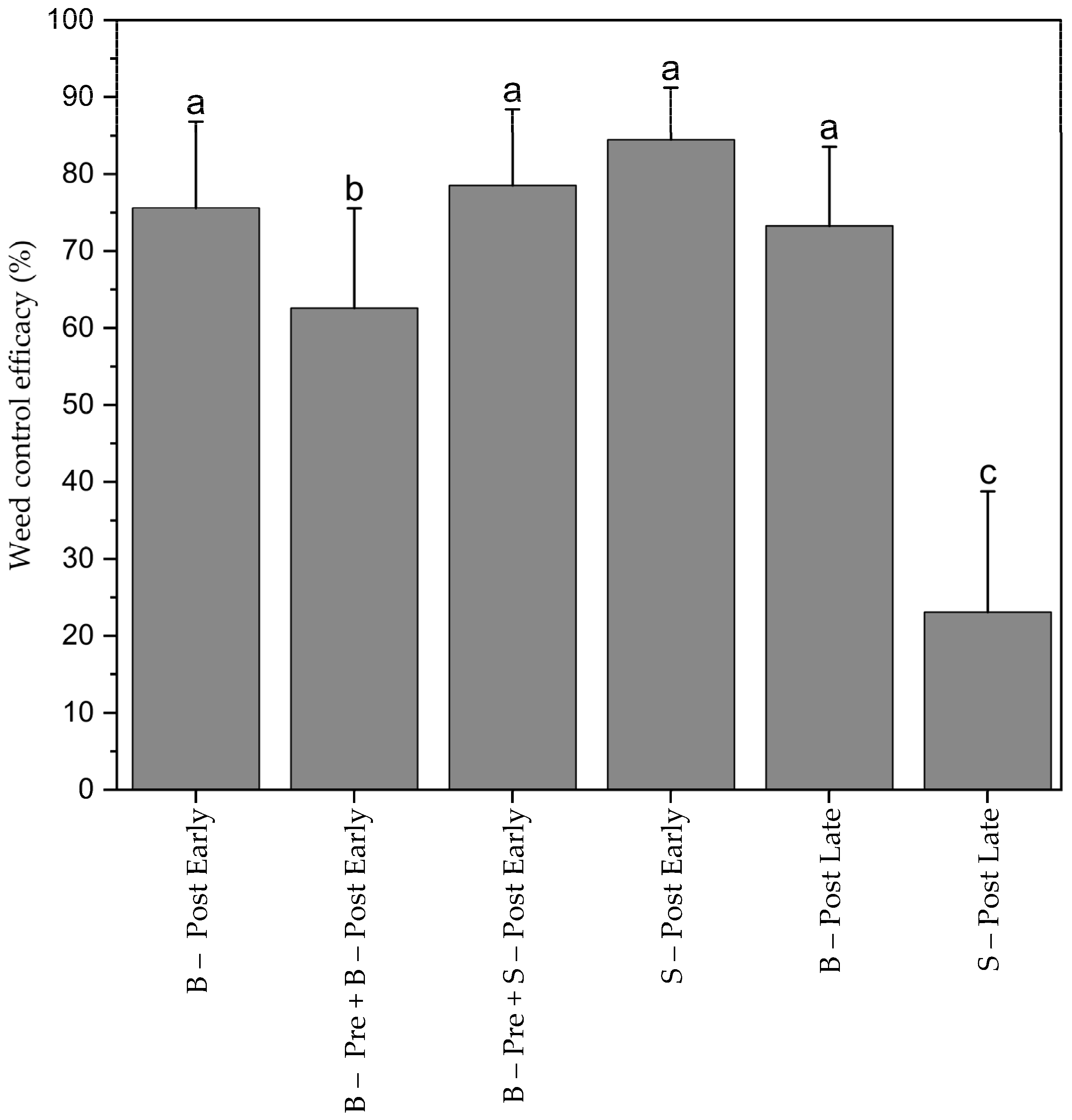
3.3. Weed Control Efficacy
3.4. Herbicide Savings of Spot Spraying
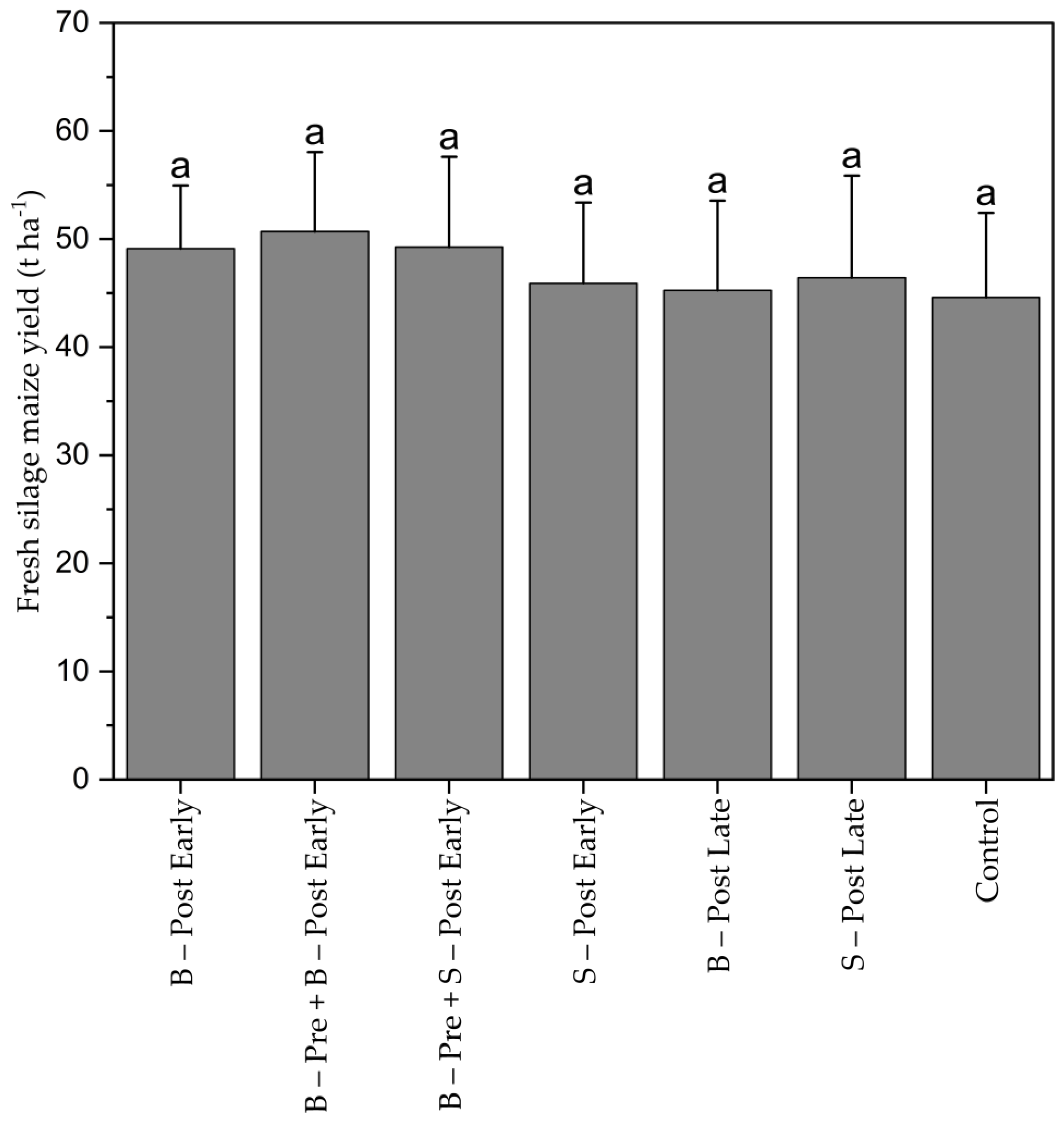
3.5. Silage Maize Yield
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hamouz, P.; Hamouzová, K.; Holec, J.; Tyšer, L. Impact of site-specific weed management on herbicide savings and winter wheat yield. Plant Soil Environ. 2013, 59, 101–107. [Google Scholar] [CrossRef]
- Gutjahr, C.; Sökefeld, M.; Gerhards, R. Evaluation of two patch spraying systems in winter wheat and maize. Weed Res. 2012, 52, 510–519. [Google Scholar] [CrossRef]
- Berge, T.W.; Goldberg, S.; Kaspersen, K.; Netland, J. Towards machine vision based site-specific weed management in cereals. Comp. Electr. Agric. 2012, 81, 79–86. [Google Scholar] [CrossRef]
- Gerhards, R.; Oebel, H. Practical experiences with a system for site-specific weed control in arable crops using real-time image analysis and GPS-controlled patch spraying. Weed Res. 2006, 46, 185–193. [Google Scholar] [CrossRef]
- Zhang, W.; Miao, Z.; Li, N.; He, C.; Sun, T. Review of Current Robotic Approaches for Precision Weed Management. Curr. Robot. Rep. 2022, 3, 139–151. [Google Scholar] [CrossRef] [PubMed]
- Fernandez-Quintanilla, C.; Peña, J.M.; Andújar, D.; Dorado, J.; Ribeiro, A. Is the current state of the art of weed monitoring suitable for site-specific weed management in arable crops? Weed Res. 2018, 58, 259–272. [Google Scholar] [CrossRef]
- Gerhards, R.; Andújar Sanchez, D.; Hamouz, P.; Peteinatos, G.G.; Christensen, S.; Fernandez-Quintanilla, C. Advances in site-specific weed management in agriculture—A review. Weed Res. 2022, 62, 123–133. [Google Scholar] [CrossRef]
- Spaeth, M.; Sökefeld, M.; Schwaderer, P.; Gauer, M.E.; Sturm, D.J.; Delatrée, C.C.; Gerhards, R. Smart sprayer a technology for site-specific herbicide application. Crop. Prot. 2024, 177, 106564. [Google Scholar] [CrossRef]
- Allmendinger, A.; Spaeth, M.; Saile, M.; Peteinatos, G.G.; Gerhards, R. Precision Chemical Weed Management Strategies: A Review and a Design of a New CNN-Based Modular Spot Sprayer. Agronomy 2022, 12, 1620. [Google Scholar] [CrossRef]
- Christensen, S.; Sogaard, H.T.; Kudsk, P.; Nørremark, M. Site specific weed control technologies. Weed Res. 2009, 49, 233–241. [Google Scholar] [CrossRef]
- Longchamps, L.; Panneton, B.; Simard, M.J.; Leroux, G.D. An imagery-based weed cover threshold established using expert knowledge. Weed Sci. 2014, 62, 177–185. [Google Scholar] [CrossRef]
- Mink, R.; Dutta, A.; Peteinatos, G.G.; Sökefeld, M.; Engels, J.; Hahn, M.; Gerhards, R. Multi-Temporal Site-Specific Weed Control of Cirsium arvense (L.) Scop. and Rumex crispus L. in Maize and Sugar Beet Using Unmanned Aerial Vehicle Based Mapping. Agriculture 2018, 8, 65. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J.C. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Streibig, J.C.; Jensen, J.E.; Pedersen, K.S.; Olsen, S.I. Pre-harvest weed mapping of Cirsium arvense in wheat and barley with off-the-shelf UAVs. Prec. Agric. 2019, 20, 983–999. [Google Scholar] [CrossRef]
- Sapkota, R.; Stenger, J.; Ostlie, M.; Flores, P. Towards reducing chemical usage for weed control in agriculture using UAS imagery analysis and computer vision techniques. Sci. Rep. 2023, 13, 6548. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024; O’Conner, L., Ed.; IEEE: Salt Lake City, UT, USA, 2024; pp. 4510–4520. [Google Scholar]
- López-Granados, F.; Torres-Sánchez, J.; de Castro, A.-I.; Serrano-Pérez, A.; Mesas-Carrascosa, F.-J.; Peña, J.-M. Object-based early monitoring of a grass weed in a grass crop using high resolution UAV imagery. Agron. Sustain. Develop. 2016, 67, 67. [Google Scholar] [CrossRef]
- Gerhards, R.; Risser, P.; Spaeth, M.; Saile, M.; Peteinatos, G.G. Robotic weeding in sugar beet (Beta vulgaris subsp. vulgaris L.) and winter oil-seed rape (Brassica napus L.). Weed Res. 2024, 64, 42–53. [Google Scholar] [CrossRef]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Prec. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Peteinatos, G.G.; Reichel, P.; Karouta, J.; Andújar, D.; Gerhards, R. Weed Identification in Maize, Sunflower, and Potatoes with the Aid of Convolutional Neural Networks. Rem. Sens. 2020, 12, 4185. [Google Scholar] [CrossRef]
- Hasan, A.M.; Sohel, F.; Diepeveen, D.; Laga, H.; Jones, M.G. A survey of deep learning techniques for weed detection from images. Comp. Electr. Agric. 2021, 184, 106067. [Google Scholar] [CrossRef]
- Janak, T.W.; Grichar, W.J. Weed Control in Corn (Zea mays L.) as Influenced by Preemergence Herbicides. Int. J. Agron. 2016, 2016, 2607671. [Google Scholar] [CrossRef]
- Pannacci, E.; Tei, F. Effects of mechanical and chemical methods on weed control, weed seed rain and crop yield in maize, sunflower and soyabean. Crop Prot. 2014, 64, 51–59. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Cultivar | Sowing Date | Pre-Emergence | Early Post-Emergence (2–4-Leaf Stage) | Late Post-Emergence (BBCH 6–8-Leaf Stage) |
|---|---|---|---|---|---|
| Bad Boll_1 | Limagrain LG631.229 | 25 May 2023 | 1 June 2023 | 16 June 2023 | 24 June 2023 |
| Bad Boll_2 | Pioneer 8255 | 30 May 2023 | 1 June 2023 | 16 June 2023 | 24 June 2023 |
| Schlierbach_1 | SY Glorius | 18 May 2023 | 24 May 2023 | 15 June 2023 | 24 June 2023 |
| Schlierbach_2 | Pioneer P9757 | 18 May 2023 | 24 May 2023 | 14 June 2023 | 24 June 2023 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allmendinger, A.; Spaeth, M.; Saile, M.; Peteinatos, G.G.; Gerhards, R. Agronomic and Technical Evaluation of Herbicide Spot Spraying in Maize Based on High-Resolution Aerial Weed Maps—An On-Farm Trial. Plants 2024, 13, 2164. https://doi.org/10.3390/plants13152164
Allmendinger A, Spaeth M, Saile M, Peteinatos GG, Gerhards R. Agronomic and Technical Evaluation of Herbicide Spot Spraying in Maize Based on High-Resolution Aerial Weed Maps—An On-Farm Trial. Plants. 2024; 13(15):2164. https://doi.org/10.3390/plants13152164
Chicago/Turabian StyleAllmendinger, Alicia, Michael Spaeth, Marcus Saile, Gerassimos G. Peteinatos, and Roland Gerhards. 2024. "Agronomic and Technical Evaluation of Herbicide Spot Spraying in Maize Based on High-Resolution Aerial Weed Maps—An On-Farm Trial" Plants 13, no. 15: 2164. https://doi.org/10.3390/plants13152164