

Design and Experimental Validation of an Adaptive Multi-Layer Neural Network Observer-Based Fast Terminal Sliding Mode Control for Quadrotor System

 and
and
Abstract
1. Introduction
- The NDI-based fast terminal SMC method offers significant benefits in terms of robustness, convergence speed, handling nonlinear dynamics, computational efficiency, and reduced chattering.
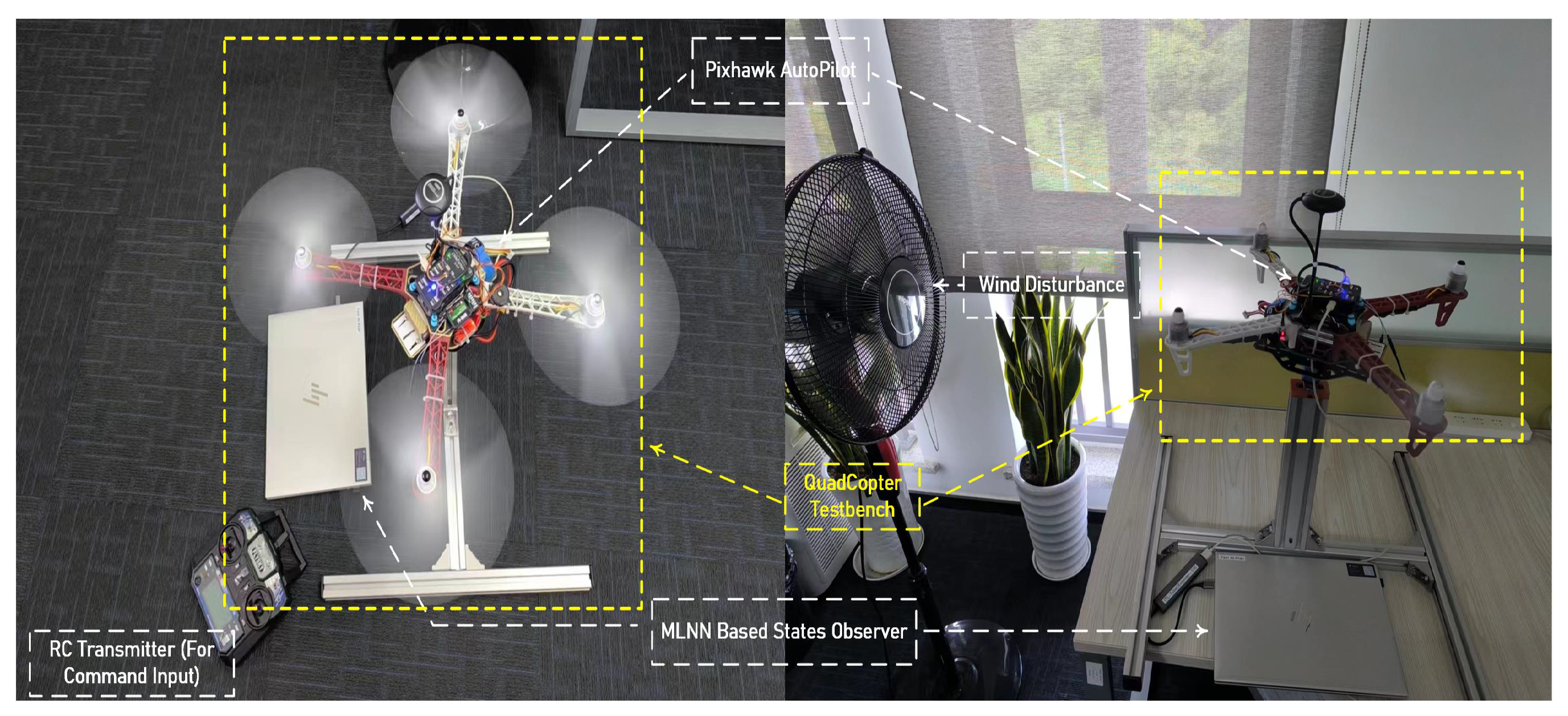
- The hardware-in-loop simulation (HILS) results using Pixhawk 6X flight controller demonstrate good performance of the proposed scheme. In addition, flight tests performed on a real quadrotor demonstrate commendable tracking accuracy.
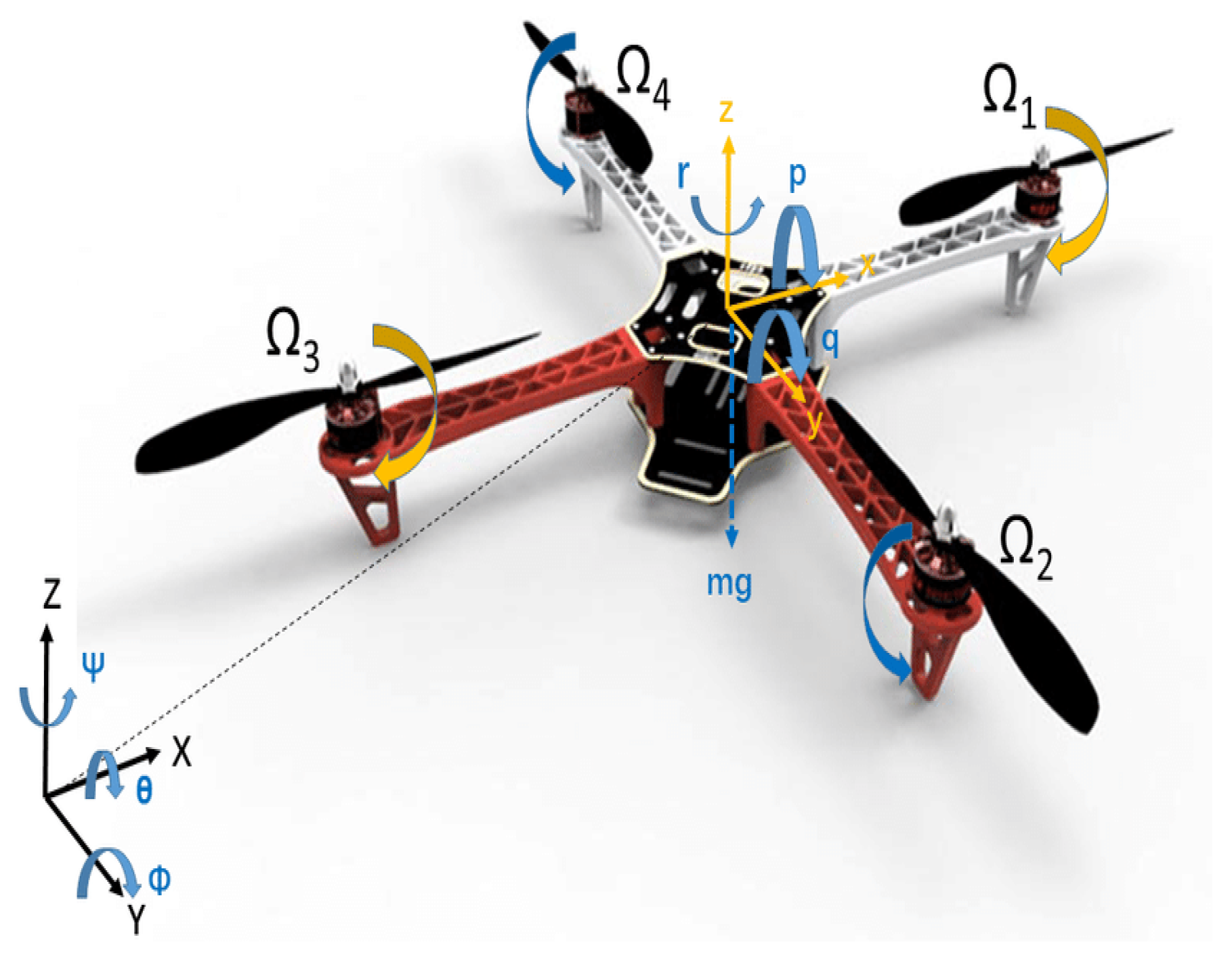
2. Dynamics of Quadrotor UAV
2.1. Kinematic Model
2.2. Dynamics Model of Quadrotor System
2.3. Thrust and Moment Model
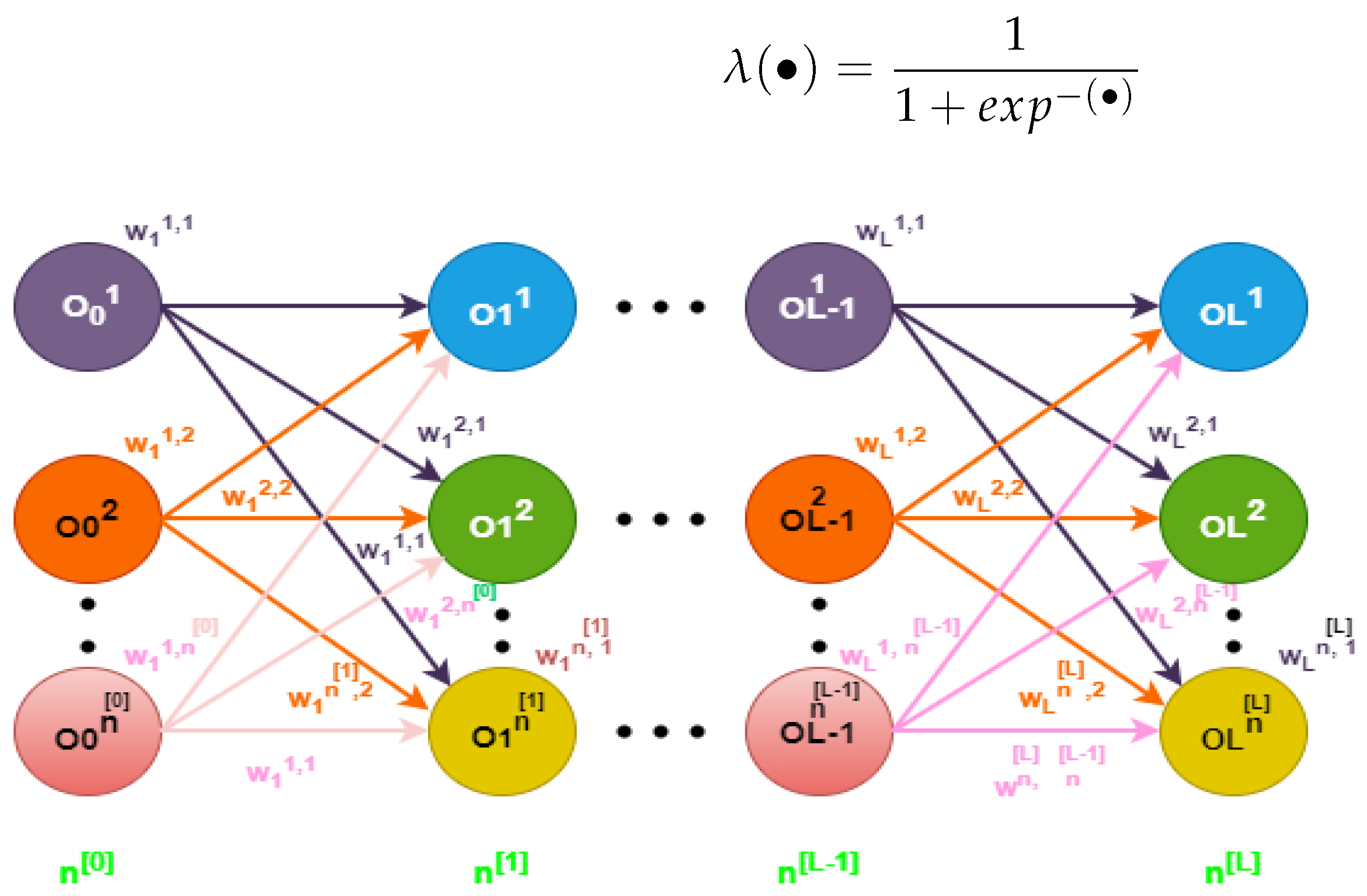
2.4. A Multi-Layer Neural Network Architecture
3. Proposed Method
3.1. Multi-Layer Neural Network-Based Luenberger Observer Design
3.2. Multi-Layer Neural Network Weight Update Law
3.3. NDI Based Fast Terminal SMC Law
3.3.1. NDI Control Law
3.3.2. Fast Terminal SMC Law
3.4. The Stability Analysis
4. Parameter Setting and Results
4.1. Parameter Settings
4.2. Results
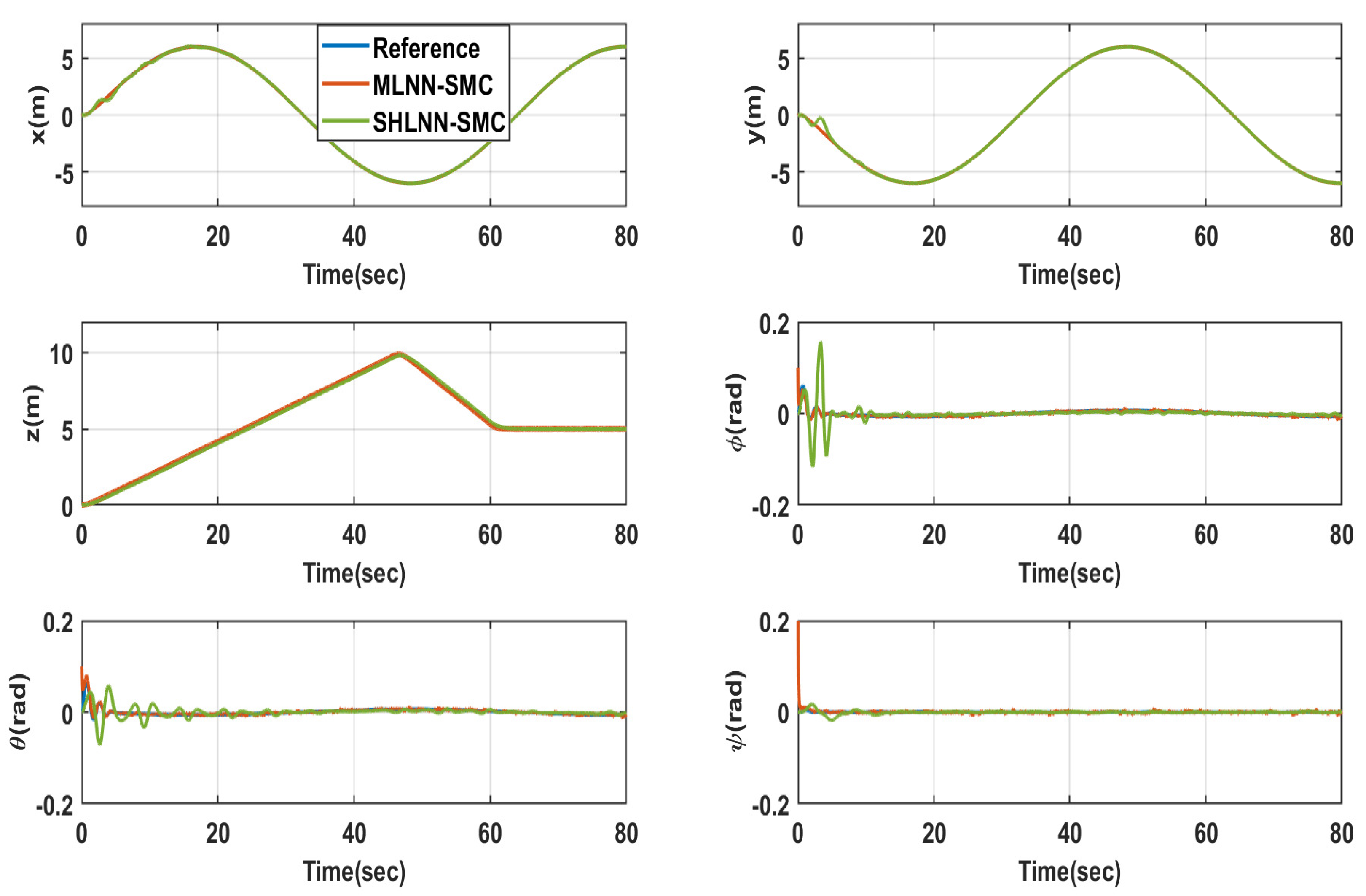
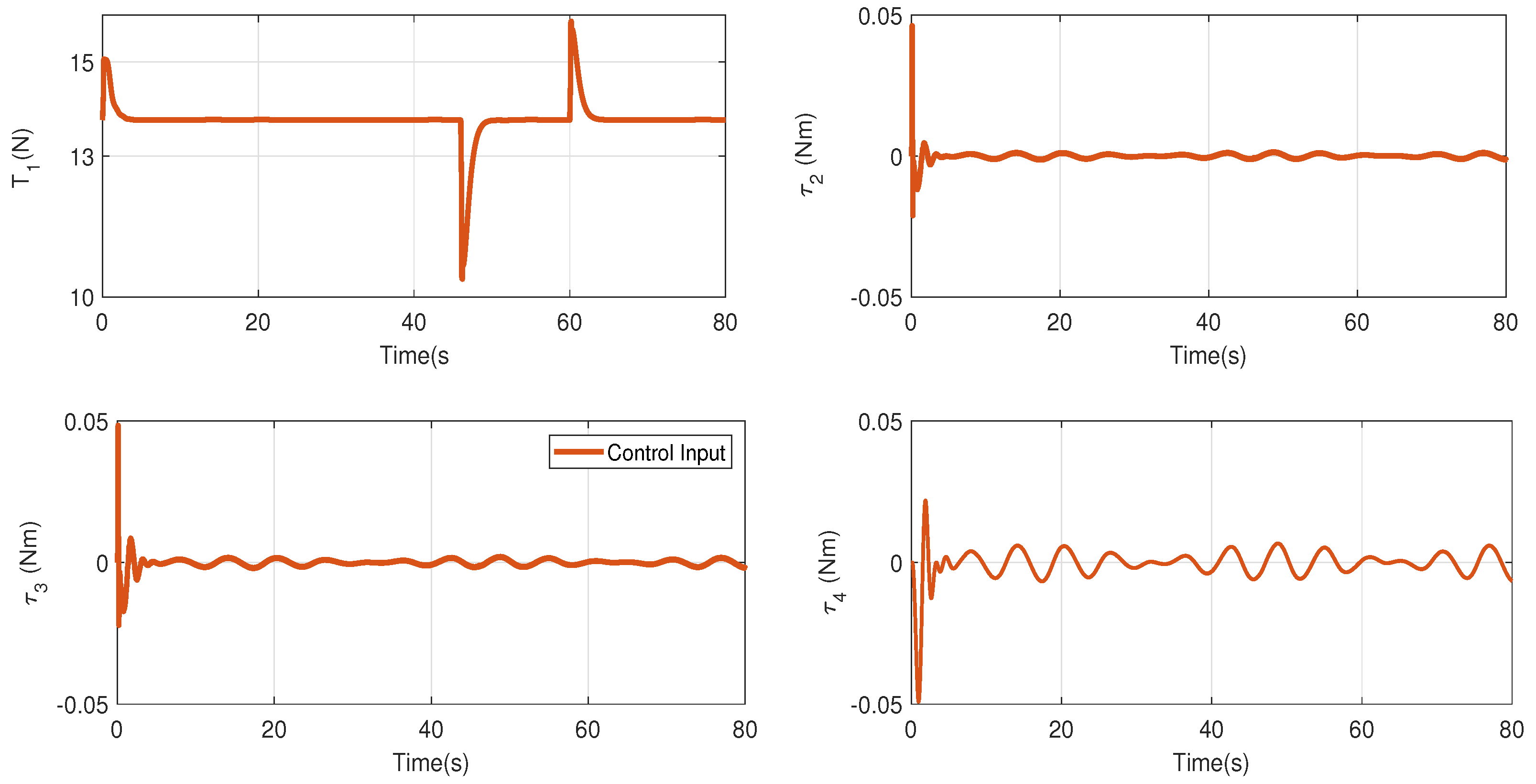
4.3. Numerical Simulations
4.3.1. Nominal Condition
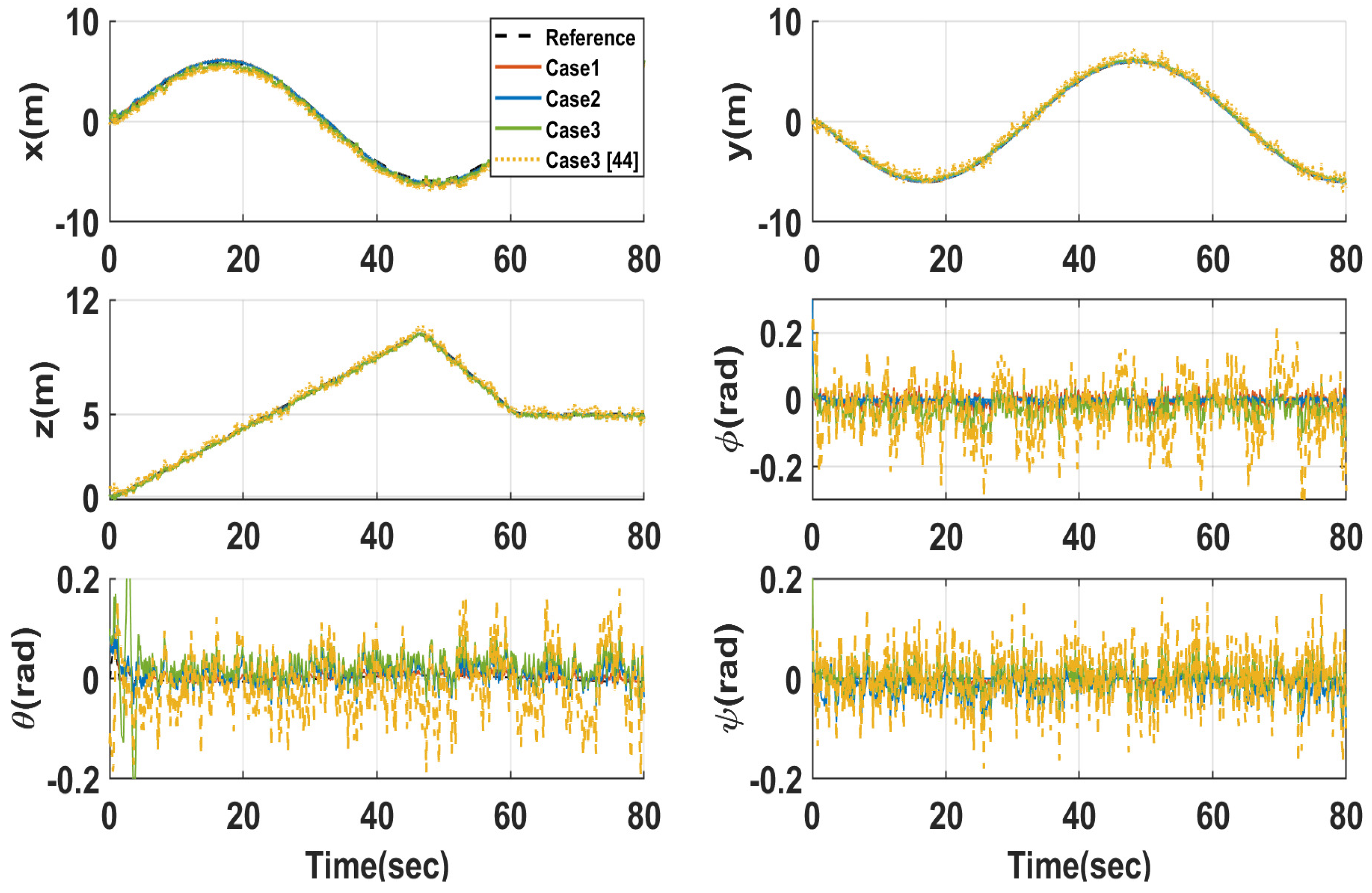
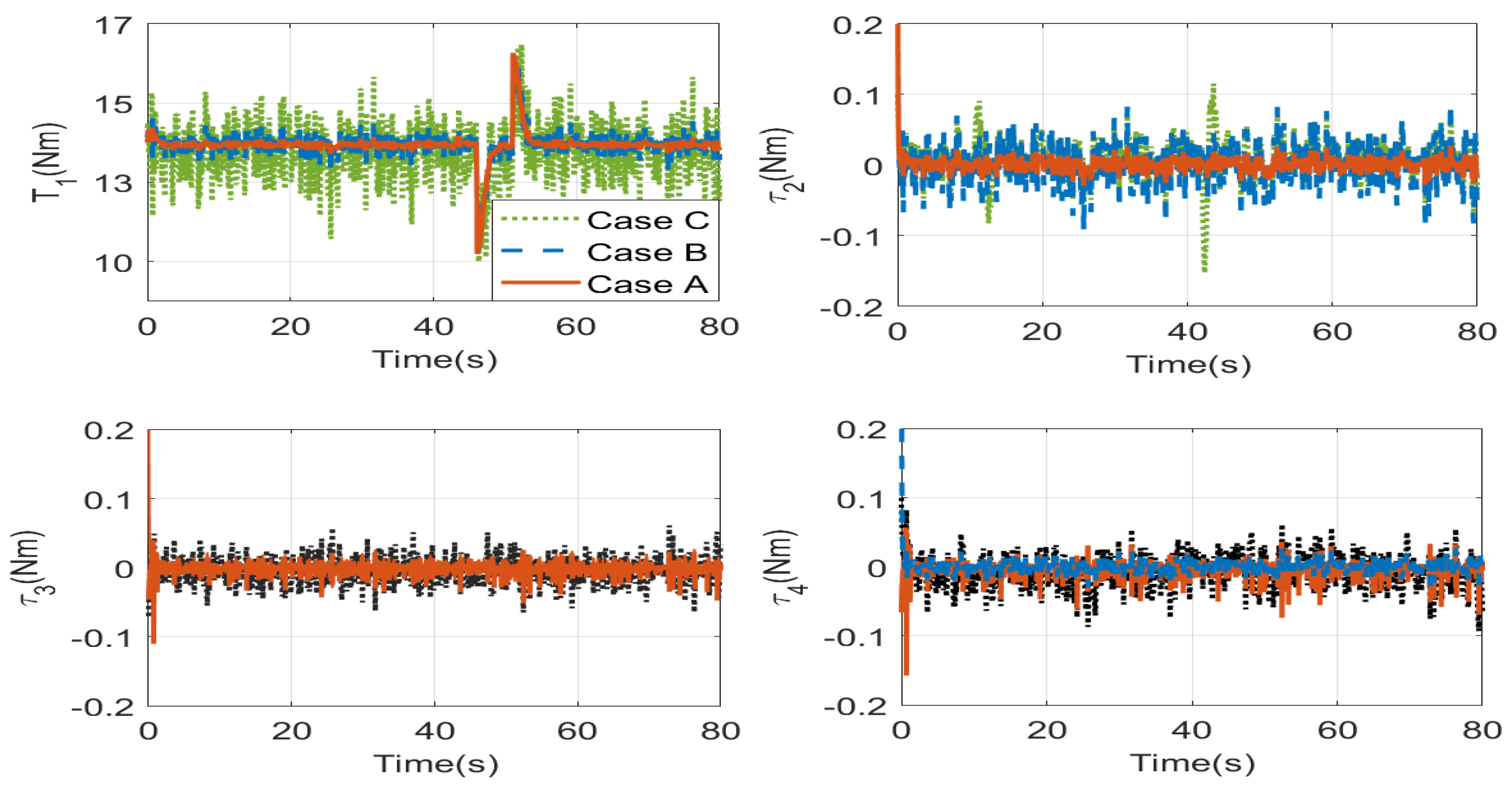
4.3.2. Results with Noise, Disturbance and Parameter Variations
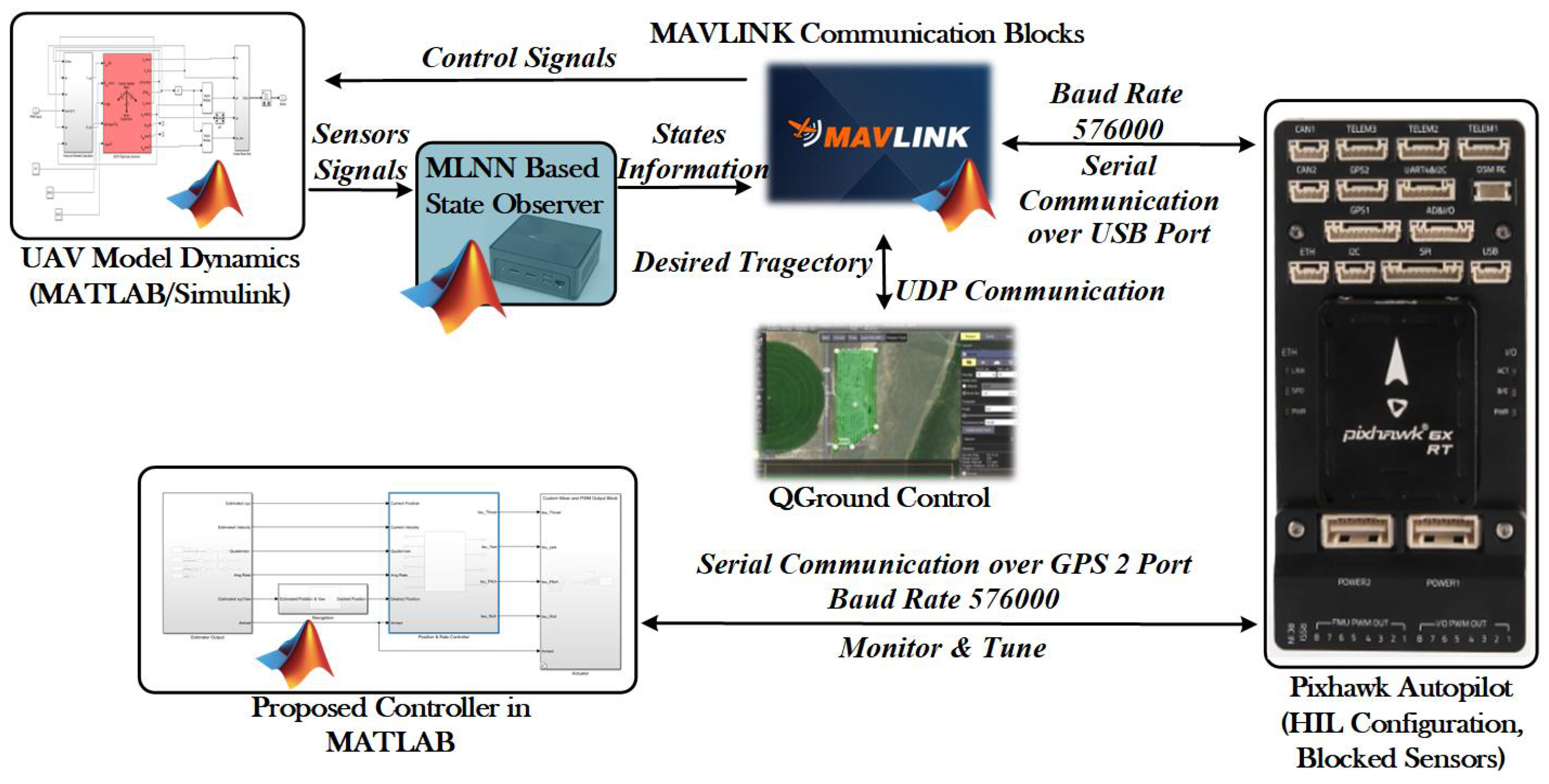
4.4. Hardware-in-the-Loop Simulations
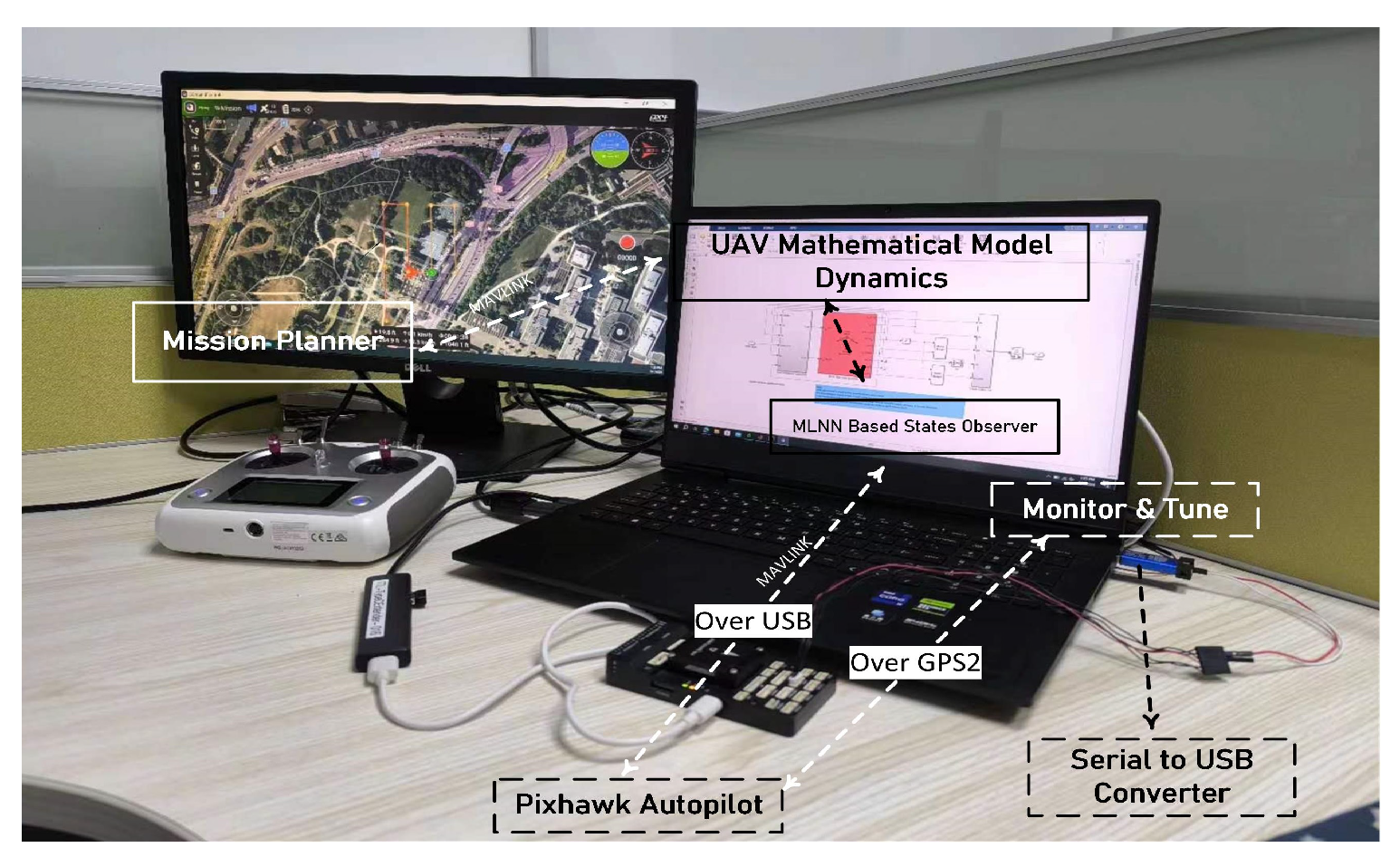
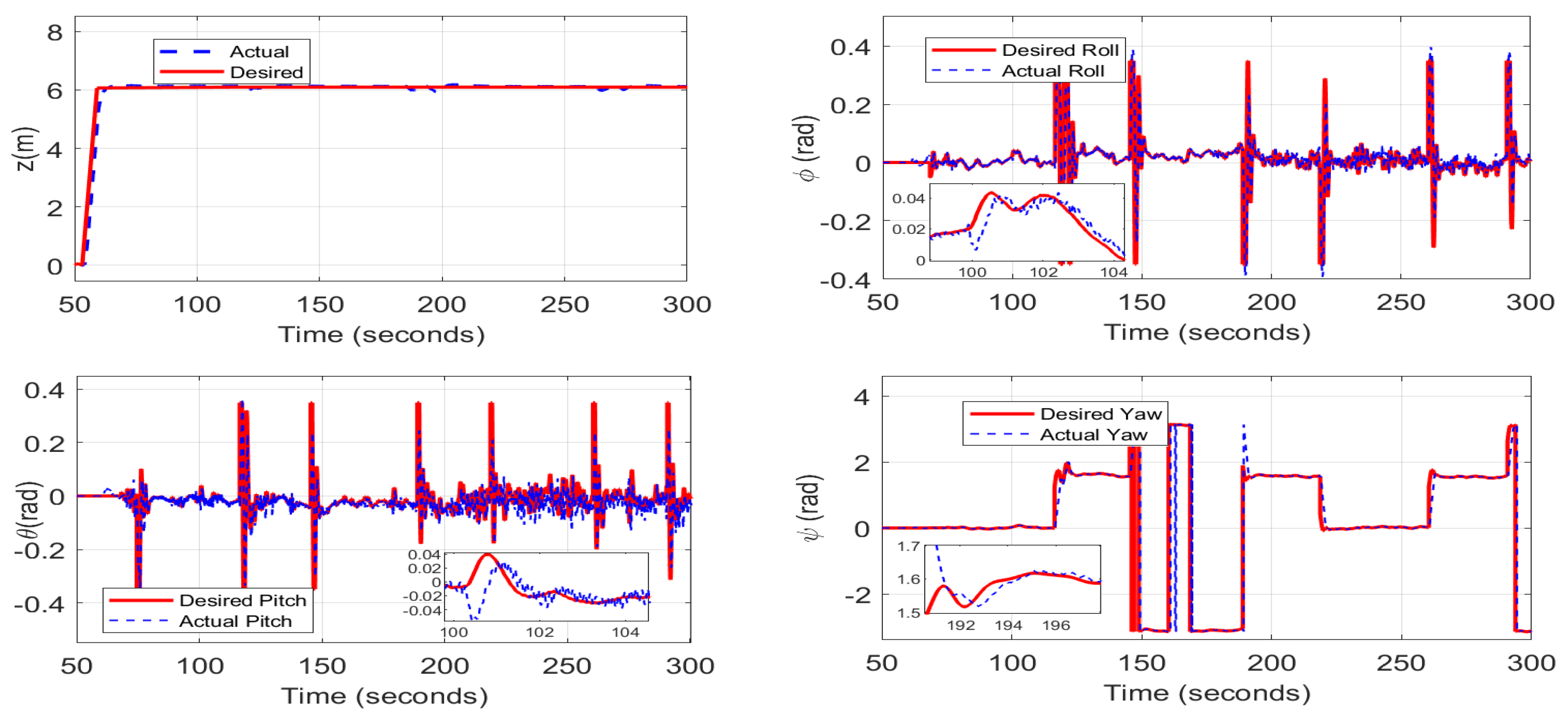
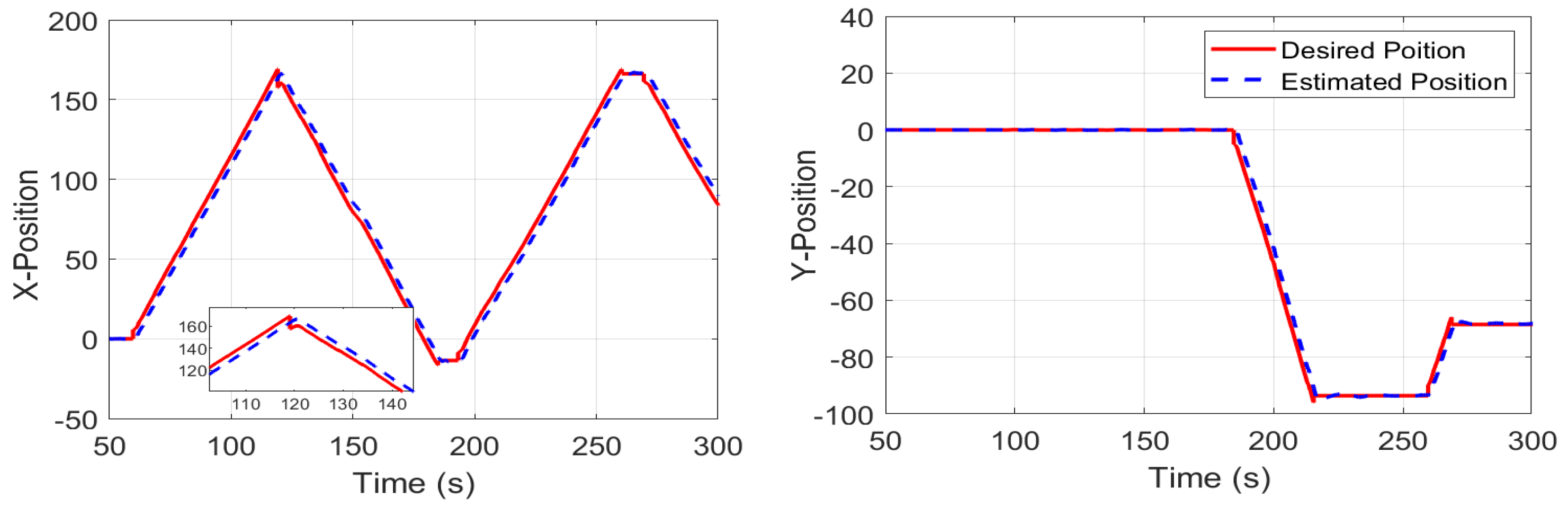
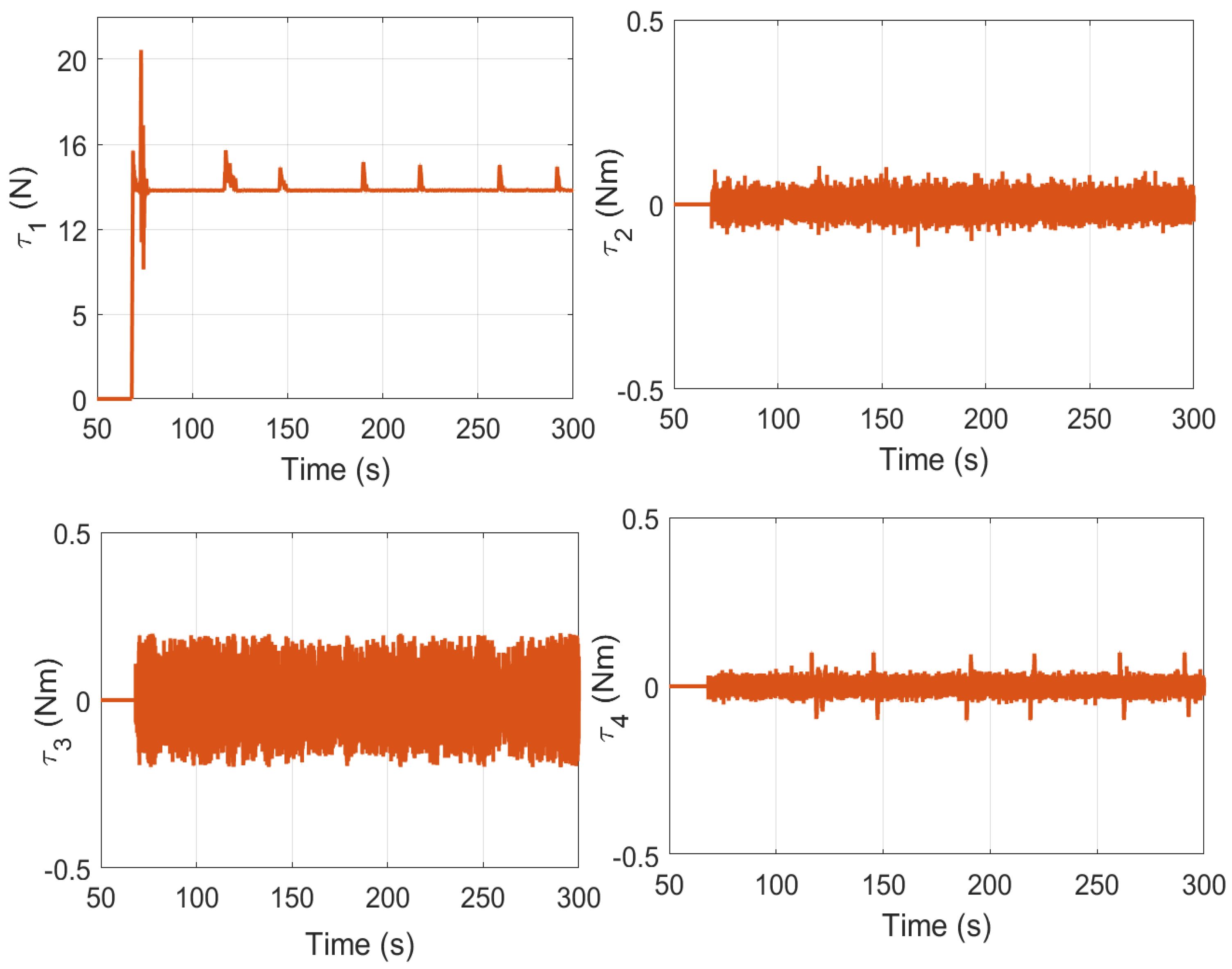
4.5. Experimental Results on Quadrotor Test-Rig
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- (a1)
- We assume and and for .
- (a2)
- For and and
References
- Wang, E.; Sun, J.; Liang, Y.; Zhou, B.; Jiang, F.; Zhu, Y. Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload. Drones 2024, 8, 103. [Google Scholar] [CrossRef]
- Hanif, A.S.; Han, X.; Yu, S.-H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Yang, T.S.; Yang, F.; Li, D. A New Autonomous Method of Drone Path Planning Based on Multiple Strategies for Avoiding Obstacles with High Speed and High Density. Drones 2024, 8, 205. [Google Scholar] [CrossRef]
- Hu, Z.; Jin, X. Adaptive formation control architectures for a team of quadrotors with multiple performance and safety constraints. Int. J. Robust Nonlinear Control 2023, 33, 8183–8204. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Wang, B. Model-free attitude synchronization for multiple heterogeneous quadrotors via reinforcement learning. Int. J. Intell. Syst. 2021, 36, 2528–2547. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Lewis, F.L. Data-driven fault-tolerant control for attitude synchronization of nonlinear quadrotors. IEEE Trans. Autom. Control 2021, 66, 5584–5591. [Google Scholar] [CrossRef]
- Xian, W.; Qi, Q.; Liu, W.; Liu, Y.; Li, D.; Wang, Y. Control of quadrotor robot via optimized nonlinear type-2 fuzzy fractional PID with fractional filter: Theory and experiment. Aerosp. Sci. Technol. 2024, 151, 109286. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Zhu, G.; Zhang, Y.; Wang, C.; Wang, Y.; Su, C.-Y. Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform. Drones 2024, 8, 264. [Google Scholar] [CrossRef]
- Lyu, X.; Zhou, J.; Gu, H.; Li, Z.; Shen, S.; Zhang, F. Disturbance Observer Based Hovering Control of Quadrotor Tail-Sitter VTOL UAVs Using H∞ Synthesis. IEEE Robot. Autom. Lett. 2018, 3, 2910–2917. [Google Scholar] [CrossRef]
- Castillo, A.; Sanz, R.; Garcia, P.; Qiu, W.; Wang, H.; Xu, C. Disturbance observer-based quadrotor attitude tracking control for aggressive maneuvers. Control Eng. Pract. 2019, 82, 14–23. [Google Scholar] [CrossRef]
- El-Sousy, F.F.; Alattas, K.A.; Mofid, O.; Mobayen, S.; Asad, J.H.; Skruch, P.; Assawinchaichote, W. Non-singular finite time tracking control approach based on disturbance observers for perturbed quadrotor unmanned aerial vehicles. Sensors 2022, 22, 2785. [Google Scholar] [CrossRef]
- Wang, J.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Inner-outer feedback linearization for quadrotor control: Two-step design and validation. Nonlinear Dyn. 2022, 110, 479–495. [Google Scholar] [CrossRef]
- Liu, K.; Yang, P.; Wang, R.; Jiao, L.; Li, T.; Zhang, J. Observer-based adaptive fuzzy finite-time attitude control for quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8637–8654. [Google Scholar] [CrossRef]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M. Nonlinear robust control of a new reconfigurable unmanned aerial vehicle. Robotics 2021, 2, 76. [Google Scholar] [CrossRef]
- Koo, S.M.; Sands, T. Bilinear interpolation of three–dimensional gain–scheduled autopilots. Sensors 2023, 24, 13. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zheng, E.-H. Optimal kalman filter for state estimation of a quadrotor UAV. Optik 2015, 126, 2862–2868. [Google Scholar] [CrossRef]
- Zhang, T.; Liao, Y. Attitude measure system based on extended Kalman filter for multi-rotors. Comput. Electron. Agric. 2017, 134, 19–26. [Google Scholar] [CrossRef]
- Khamseh, H.B.; Ghorbani, S.; Janabi-Sharifi, F. Unscented Kalman filter state estimation for manipulating unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 92, 446–463. [Google Scholar] [CrossRef]
- Cai, W.; She, J.; Wu, M.; Ohyama, Y. Disturbance suppression for quadrotor UAV using sliding-mode-observer-based equivalent-input-disturbance approach. ISA Trans. 2019, 92, 286–297. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, D.; Yang, J.; Wang, H. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics. Nonlinear Dyn. 2020, 102, 2583–2596. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Liu, H.; Chen, C.P. Adaptive robust output feedback control for a marine dynamic positioning system based on a high-gain observer. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2775–2786. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Wang, J. Distributed observer-based control law with better dynamic performance based on distributed high-gain observer. Int. J. Syst. Sci. 2020, 51, 631–642. [Google Scholar] [CrossRef]
- Nicosia, S.; Tornambè, A. High-gain observers in the state and parameter estimation of robots having elastic joints. Syst. Control Lett. 1989, 13, 331–337. [Google Scholar] [CrossRef]
- Muliadi, J.; Kusumoputro, B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system. J. Adv. Transp. 2018, 2018, 3823201. [Google Scholar] [CrossRef]
- Gu, W.; Valavanis, K.P.; Rutherford, M.J.; Rizzo, A. UAV Model-based Flight Control with Artificial Neural Networks: A Survey. J. Intell. Robot. Syst. 2020, 100, 1469–1491. [Google Scholar] [CrossRef]
- Ma, Y.; Cai, Y. A fuzzy model predictive control based upon adaptive neural network disturbance observer for a constrained hypersonic vehicle. IEEE Access 2017, 6, 5927–5938. [Google Scholar] [CrossRef]
- Wang, D.; Zong, Q.; Tian, B.; Shao, S.; Zhang, X.; Zhao, X. Neural network disturbance observer-based distributed finite-time formation tracking control for multiple unmanned helicopters. ISA Trans. 2018, 73, 208–226. [Google Scholar] [CrossRef]
- Matassini, T.; Shin, H.-S.; Tsourdos, A.; Innocenti, M. Adaptive control with neural networks-based disturbance observer for a spherical UAV. IFAC-PapersOnLine 2016, 49, 308–313. [Google Scholar] [CrossRef]
- Stebler, S.; Campobasso, M.; Kidambi, K.; MacKunis, W.; Reyhanoglu, M. Dynamic neural network-based sliding mode estimation of quadrotor systems. In Proceedings of the IEEE 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 2600–2605. [Google Scholar]
- Jaradat, M.A.K.; Abdel-Hafez, M.F. Non-linear autoregressive delay-dependent INS/GPS navigation system using neural networks. IEEE Sens. J. 2016, 17, 1105–1115. [Google Scholar] [CrossRef]
- Boudjedir, H.; Bouhali, O.; Rizoug, N. Adaptive neural network control based on neural observer for quadrotor unmanned aerial vehicle. Adv. Robot. 2014, 28, 1151–1164. [Google Scholar] [CrossRef]
- Zhao, B.; Xu, S.; Guo, J.; Jiang, R.; Zhou, J. Integrated strapdown missile guidance and control based on neural network disturbance observer. Aerosp. Sci. Technol. 2019, 84, 170–181. [Google Scholar] [CrossRef]
- Lakhal, A.; Tlili, A.; Braiek, N.B. Neural network observer for nonlinear systems application to induction motors. Int. J. Control Autom. 2010, 3, 1–16. [Google Scholar]
- Ullah, M.; Zhao, C.; Maqsood, H.; Humayun, M.; Hassan, M.U. Exponential Sliding Mode Control Based on a Neural Network and Finite-Time Disturbance Observer for an Autonomous Aerial Vehicle Exposed to Environmental Disturbances and Parametric Uncertainties. J. Control. Autom. Electr. Syst. 2022, 33, 1659–1670. [Google Scholar] [CrossRef]
- Al-Sharman, M.K.; Zweiri, Y.; Jaradat, M.A.K.; Al-Husari, R.; Gan, D.; Seneviratne, L.D. Deep-learning-based neural network training for state estimation enhancement: Application to attitude estimation. IEEE Trans. Instrum. Meas. 2019, 69, 24–34. [Google Scholar] [CrossRef]
- Yuning, J.; Rasool, M.A.U.; Qian, B.; Farid, G.; Chaudary, S.T. An Adaptive Neural Network State Estimator for Quadrotor Unmanned Air Vehicle. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 316–321. [Google Scholar] [CrossRef]
- Gao, Y.; Zhu, G.; Zhao, T. Based on backpropagation neural network and adaptive linear active disturbance rejection control for attitude of a quadrotor carrying a load. Appl. Sci. 2022, 12, 12698. [Google Scholar] [CrossRef]
- Shen, S.; Xu, J.; Chen, P.; Xia, Q. Adaptive Neural Network Extended State Observer-Based Finite-Time Convergent Sliding Mode Control for a Quad Tiltrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6360–6373. [Google Scholar] [CrossRef]
- Munoz, F.; Espinoza, E.S.; Salazar, S.; Gonzalez, I.; Lozano, R. Second Order Sliding Mode Controllers for Altitude Control of a Quadrotor UAS: Real-Time Implementation in Outdoor Environments. Neurocomputing 2017, 233, 61–71. [Google Scholar] [CrossRef]
- Antonio-Toledo, M.E.; Sanchez, E.N.; Alanis, A.Y.; Flórez, J.A.; Perez-Cisneros, M.A. Real-Time Integral Backstepping with Sliding Mode Control for a Quadrotor UAV. IFAC-PapersOnLine 2018, 51, 549–554. [Google Scholar] [CrossRef]
- Kahouadji, M.; Mokhtari, M.R.; Choukchou-Braham, A.; Cherki, B. Real-time attitude control of 3 DOF quadrotor UAV using modified Super Twisting algorithm. J. Frankl. Inst. 2020, 357, 2681–2695. [Google Scholar] [CrossRef]
- Firdaus, A.R.; Tokhi, M.O. Real-time embedded system of super twisting-based integral sliding mode control for quadcopter UAV. In Proceedings of the 2019 2nd International Conference on Applied Engineering (ICAE), Batam, Indonesia, 2–3 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Noordin, A.; Mohd Basri, M.A.; Mohamed, Z. Real-Time Implementation of an Adaptive PID Controller for the Quadrotor MAV Embedded Flight Control System. Aerospace 2023, 10, 59. [Google Scholar] [CrossRef]
- Borbolla-Burillo, P.; Sotelo, D.; Frye, M.; Garza-Castañón, L.E.; Juárez-Moreno, L.; Sotelo, C. Design and Real-Time Implementation of a Cascaded Model Predictive Control Architecture for Unmanned Aerial Vehicles. Mathematics 2024, 12, 739. [Google Scholar] [CrossRef]
- Athayde, A.; Moutinho, A.; Azinheira, J.R. Experimental Nonlinear and Incremental Control Stabilization of a Tail-Sitter UAV with Hardware-in-the-Loop Validation. Robotics 2024, 13, 51. [Google Scholar] [CrossRef]
- Quan, Q. Introduction to Multicopter Design and Control, 1st ed.; Springer: Singapore, 2017. [Google Scholar] [CrossRef]
- Dai, X.; Ke, C.; Quan, Q.; Cai, K.Y. RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerosp. Sci. Technol. 2021, 114, 106727. [Google Scholar] [CrossRef]
- Hamayun, M.T.; Ijaz, S.; Bajodah, A.H. Output integral sliding mode fault tolerant control scheme for LPV plants by incorporating control allocation. IET Control Theory Appl. 2017, 11, 1959–1967. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems, 3rd ed.; Michigan State University: East Lansing, MI, USA, 2002. [Google Scholar]
- Rahaman-Noronha, M.; William, B.; Bramesfeld, G. Circular Flight-Path Optimization for a Solar-Powered UAV Flying in Horizontal Winds. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Giagkos, A.; Tuci, E.; Wilson, M.S.; Charlesworth, P.B. UAV flight coordination for communication networks: Genetic algorithms versus game theory. Soft Comput. 2021, 25, 9483–9503. [Google Scholar] [CrossRef]
- Baca, T.; Stepan, P.; Spurny, V.; Hert, D.; Penicka, R.; Saska, M.; Thomas, J.; Loianno, G.; Kumar, V. Autonomous landing on a moving vehicle with an unmanned aerial vehicle. J. Field Robot. 2019, 36, 874–891. [Google Scholar] [CrossRef]
- Hoblit, F.M. Gust Loads on Aircraft: Concepts and Applications; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1988. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Magnitudes | Details |
|---|---|---|
| 2.11 × kgm2 | Inertia along X-axis | |
| 2.19 × kgm2 | Inertia along Y-axis | |
| 3.66 × kgm2 | Inertia along Z-axis | |
| 1.28 × kgm2 | Inertia of Rotor | |
| b | 1.105 × Ns2 | Thrust coefficient |
| d | 7.3 × ms2 | Coefficient of drag |
| m | 1.4 kg | Mass |
| l | 2.25 × m | Arm length |
| Gain | ||||||
| Value | 5 | 5 | 2.5 | 10 | 10 | 5 |
| Gain | ||||||
| Value | 3.75 | 3.75 | 2.5 | 3.5 | 3.25 | 5 |
| Gain | ||||||
| Value | 3 | 3 | 1.5 | 2.5 | 2.5 | 4 |
| Gain | ||||||
| Value | 0.5 | 0.5 | 1 | 0.25 | 0.25 | 0.01 |
| Gain | ||||||
| Value | 238 | 205 | 0.008 | 0.08 | 0.08 | 0.05 |
| Parameters | Proposed Scheme | [39] |
|---|---|---|
| 3.3 × | 6.2 × | |
| 2.5 × | 4.3 × | |
| 2.01 × | 3.3 × | |
| 1.3 × | 3.9 × | |
| 2.13 × | 4.4 × | |
| 3.4 × | 5.1 × |
| Parameters | Case A | Case B | Case C | Case C [44] |
|---|---|---|---|---|
| 2.5 × | 6.1 × | 3.1 × | 4.9 × | |
| 1.63 × | 5.7 × | 2.4 × | 3.8 × | |
| 1.1 × | 2.9 × | 2.1 × | 8.3 × | |
| 8.3 × | 2.3 × | 5.2 × | 7.3 × | |
| 9.13 × | 3.5 × | 9.8 × | 4.13 × | |
| 2.35 × | 4.2 × | 6.7 × | 3.4 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akhtar, Z.; Naqvi, S.A.Z.; Khan, Y.A.; Hamayun, M.T.; Ijaz, S. Design and Experimental Validation of an Adaptive Multi-Layer Neural Network Observer-Based Fast Terminal Sliding Mode Control for Quadrotor System. Aerospace 2024, 11, 788. https://doi.org/10.3390/aerospace11100788
Akhtar Z, Naqvi SAZ, Khan YA, Hamayun MT, Ijaz S. Design and Experimental Validation of an Adaptive Multi-Layer Neural Network Observer-Based Fast Terminal Sliding Mode Control for Quadrotor System. Aerospace. 2024; 11(10):788. https://doi.org/10.3390/aerospace11100788
Chicago/Turabian StyleAkhtar, Zainab, Syed Abbas Zilqurnain Naqvi, Yasir Ali Khan, Mirza Tariq Hamayun, and Salman Ijaz. 2024. "Design and Experimental Validation of an Adaptive Multi-Layer Neural Network Observer-Based Fast Terminal Sliding Mode Control for Quadrotor System" Aerospace 11, no. 10: 788. https://doi.org/10.3390/aerospace11100788
APA StyleAkhtar, Z., Naqvi, S. A. Z., Khan, Y. A., Hamayun, M. T., & Ijaz, S. (2024). Design and Experimental Validation of an Adaptive Multi-Layer Neural Network Observer-Based Fast Terminal Sliding Mode Control for Quadrotor System. Aerospace, 11(10), 788. https://doi.org/10.3390/aerospace11100788