
The Angular Momentum Unloading of the Asymmetric GEO Satellite by Using Electric Propulsion with a Mechanical Arm

 ,
,
Abstract
1. Introduction
- (1)
- The angular momentum unloading scheme of four-vector EP has the characteristics of small deflection angle of electric thrust, weak position and attitude adjustment ability, small angular momentum unloading ability, etc., which cannot meet the requirements of angular momentum unloading of asymmetric structure satellites;
- (2)
- Although the angular momentum unloading scheme with fixed EP can achieve large angular momentum unloading, the thrust of angular momentum unloading cannot be fully used for SK of GEO satellites, resulting in fuel waste. The fixed installation of electric thrusters cannot realize the active adjustment of position and attitude, and the number of electric thrusters to be configured is large, which is difficult to be deployed on GEO satellites.
- (1)
- In the past, 2- to 4-vector electric thrusters were needed to achieve small angular momentum unloading. In this paper, only one EP with a mechanical arm is needed to achieve large angular momentum unloading, which can reduce the hardware configuration on board;
- (2)
- In the past, angular momentum unloading required ignition in 2 to 4 different orbital arcs. In this paper, the angular momentum unloading can be achieved only by firing in one orbit arc, which reduces the number of ignition times.
- (3)
- In the process of attitude maneuvering, SK and angular momentum unloading can be carried out at the same time, which can realize complex attitude and orbit coupling control.
2. Materials and Methods
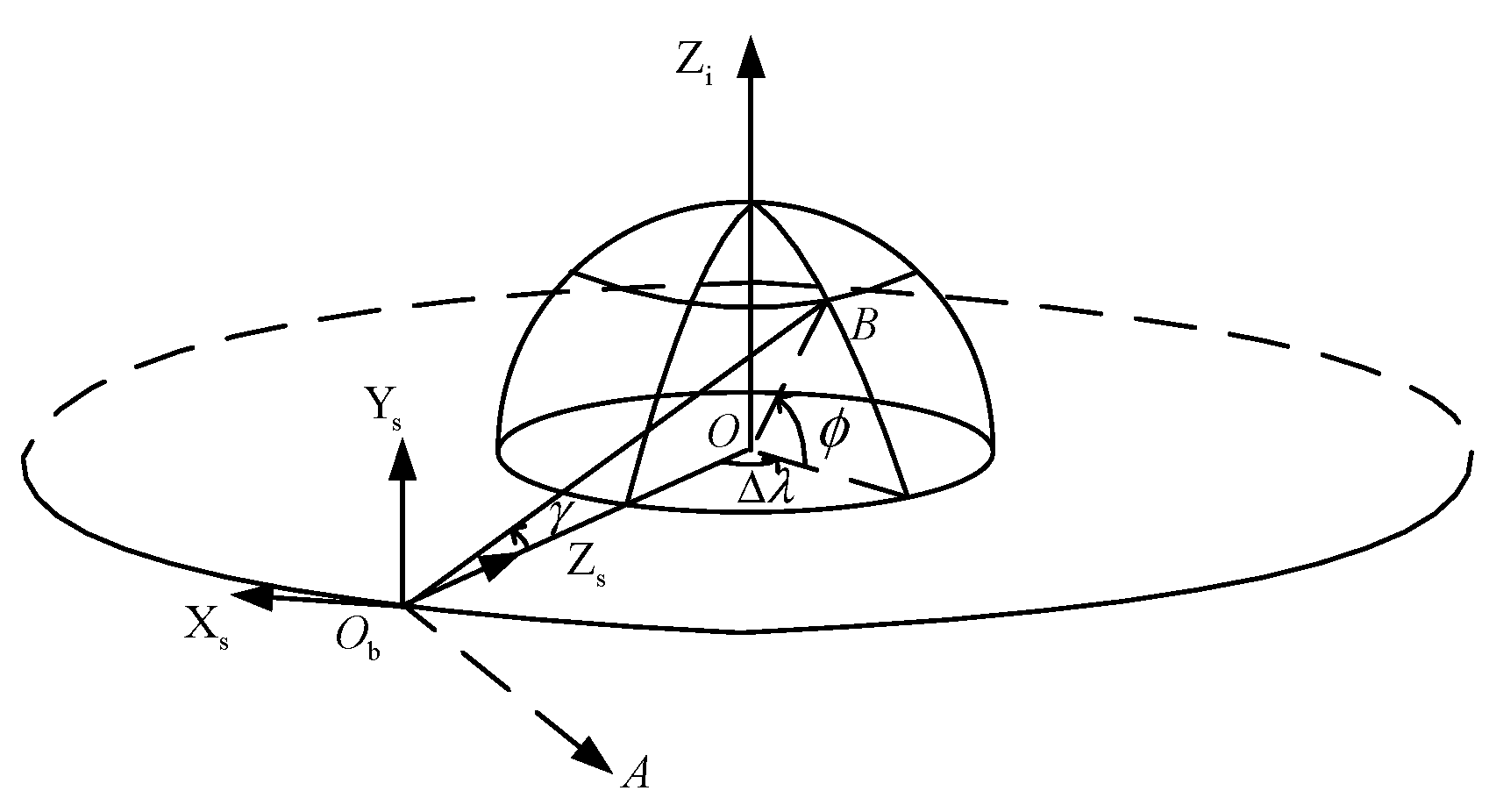
2.1. Establishment of Coordinate System
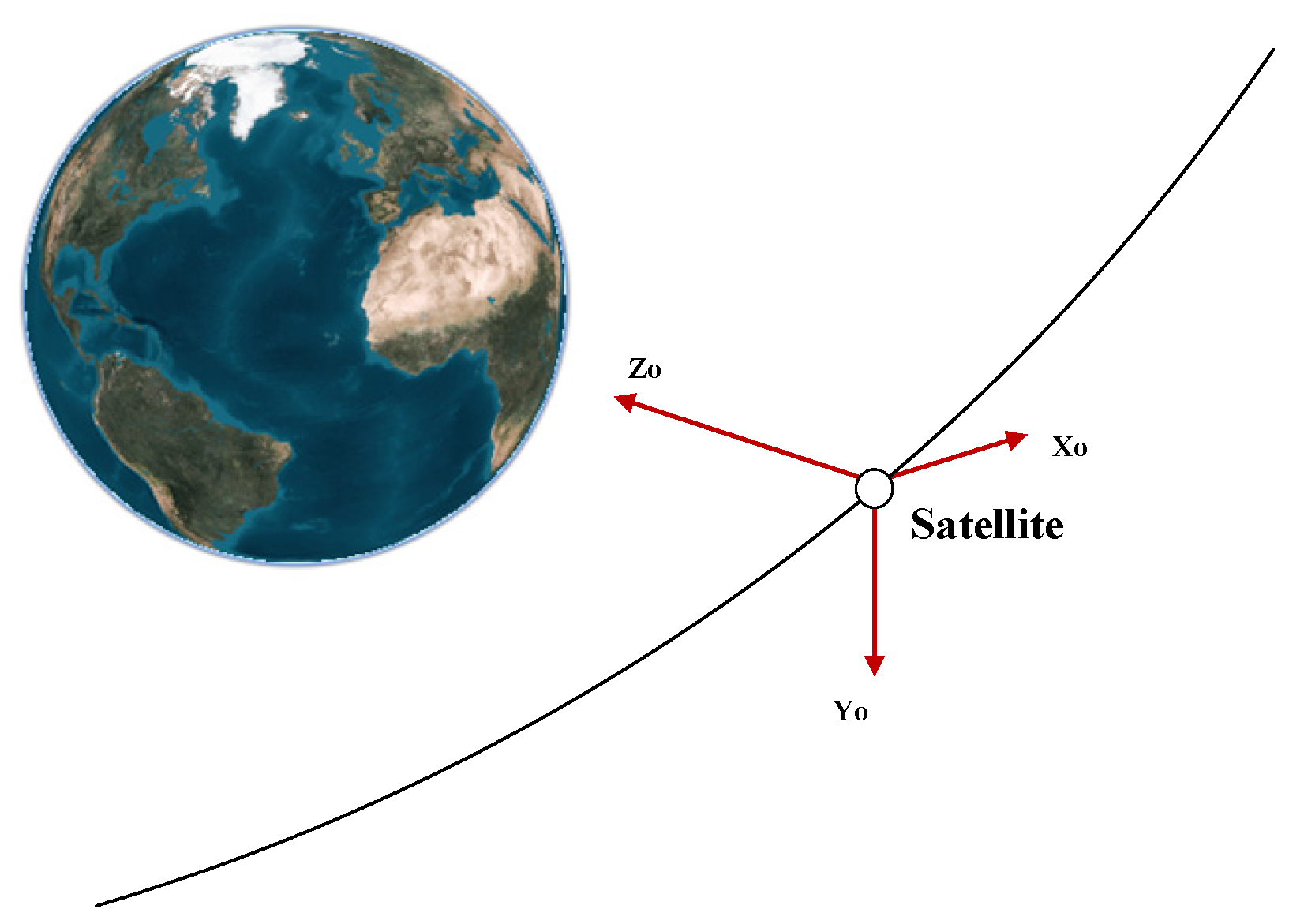
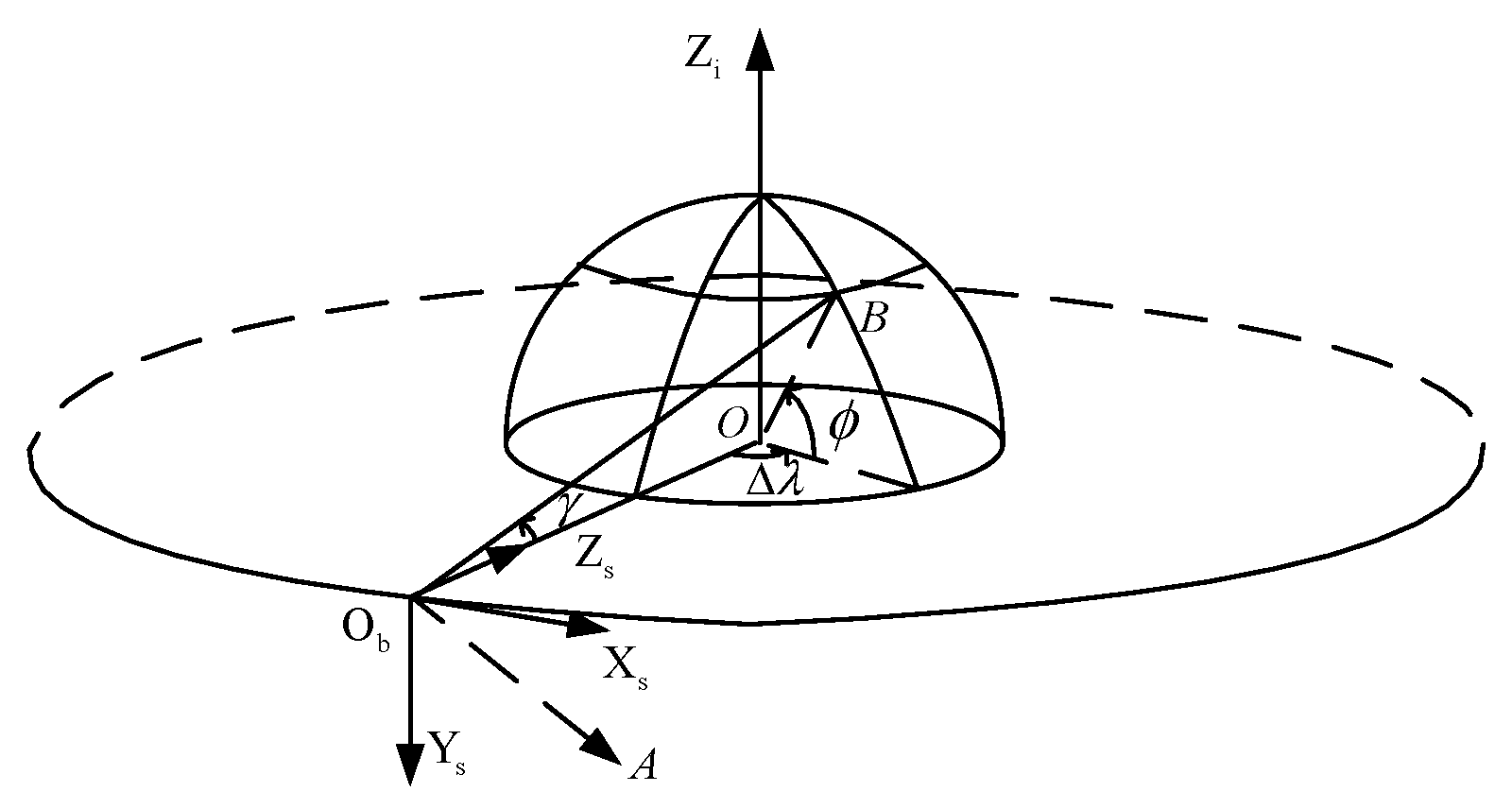
2.1.1. Satellite Orbital Coordinate System
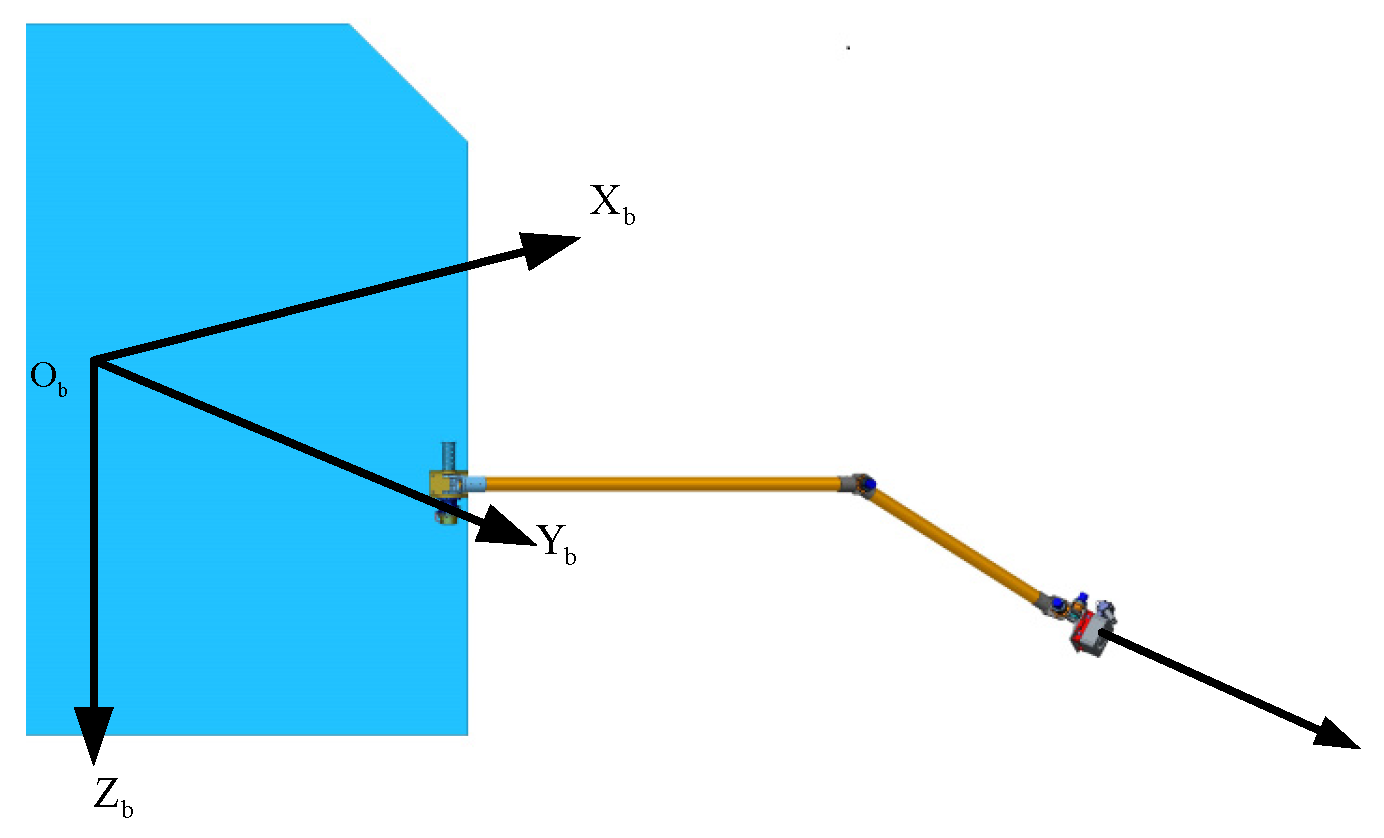
2.1.2. Satellite Body Coordinate System
2.1.3. Nominal Coordinate System
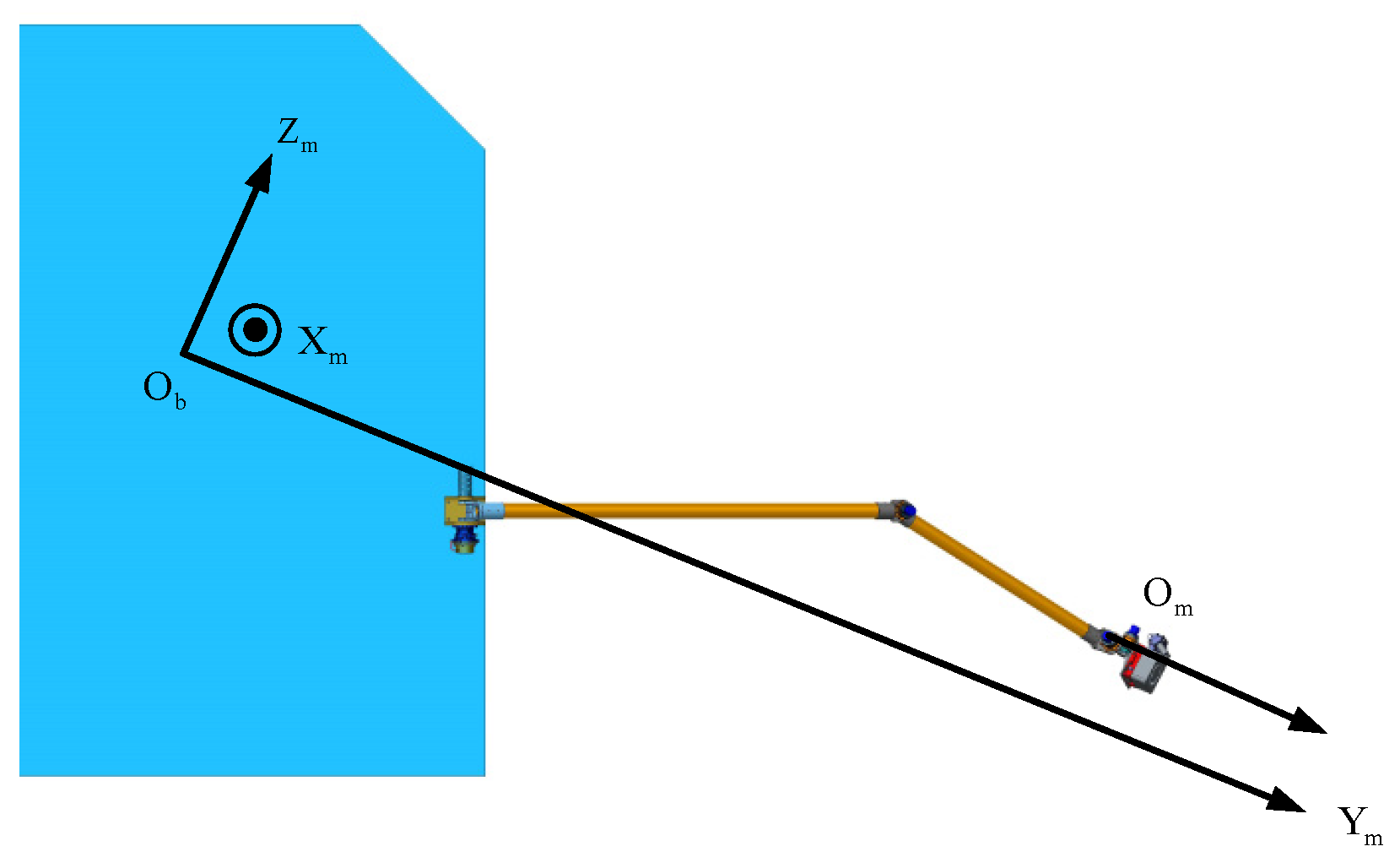
2.1.4. Mechanical Arm Coordinate System
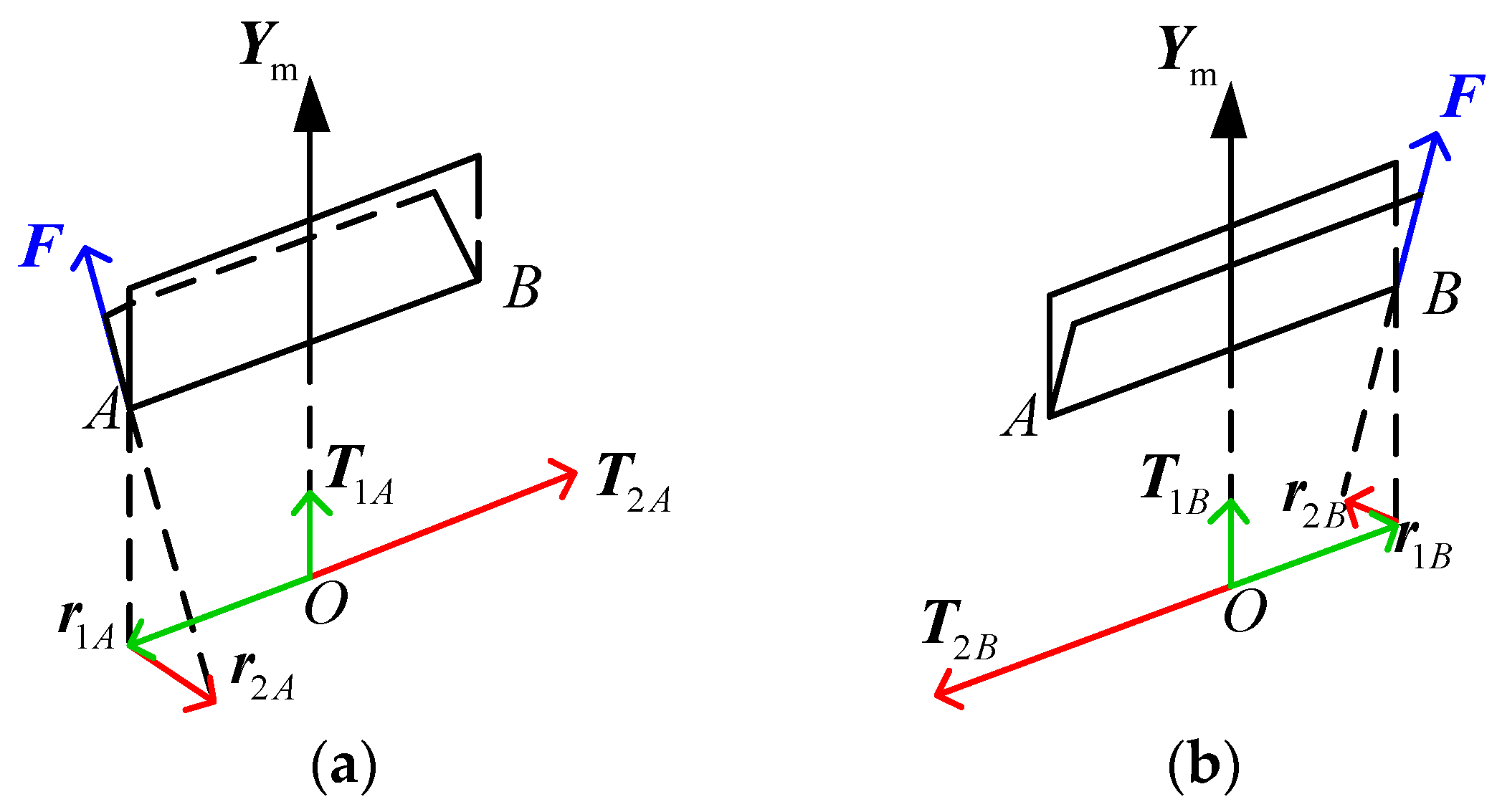
2.2. Strategy of Unloading Angular Momentum
2.3. Position and Attitude Calculation of EP with a Mechanical Arm
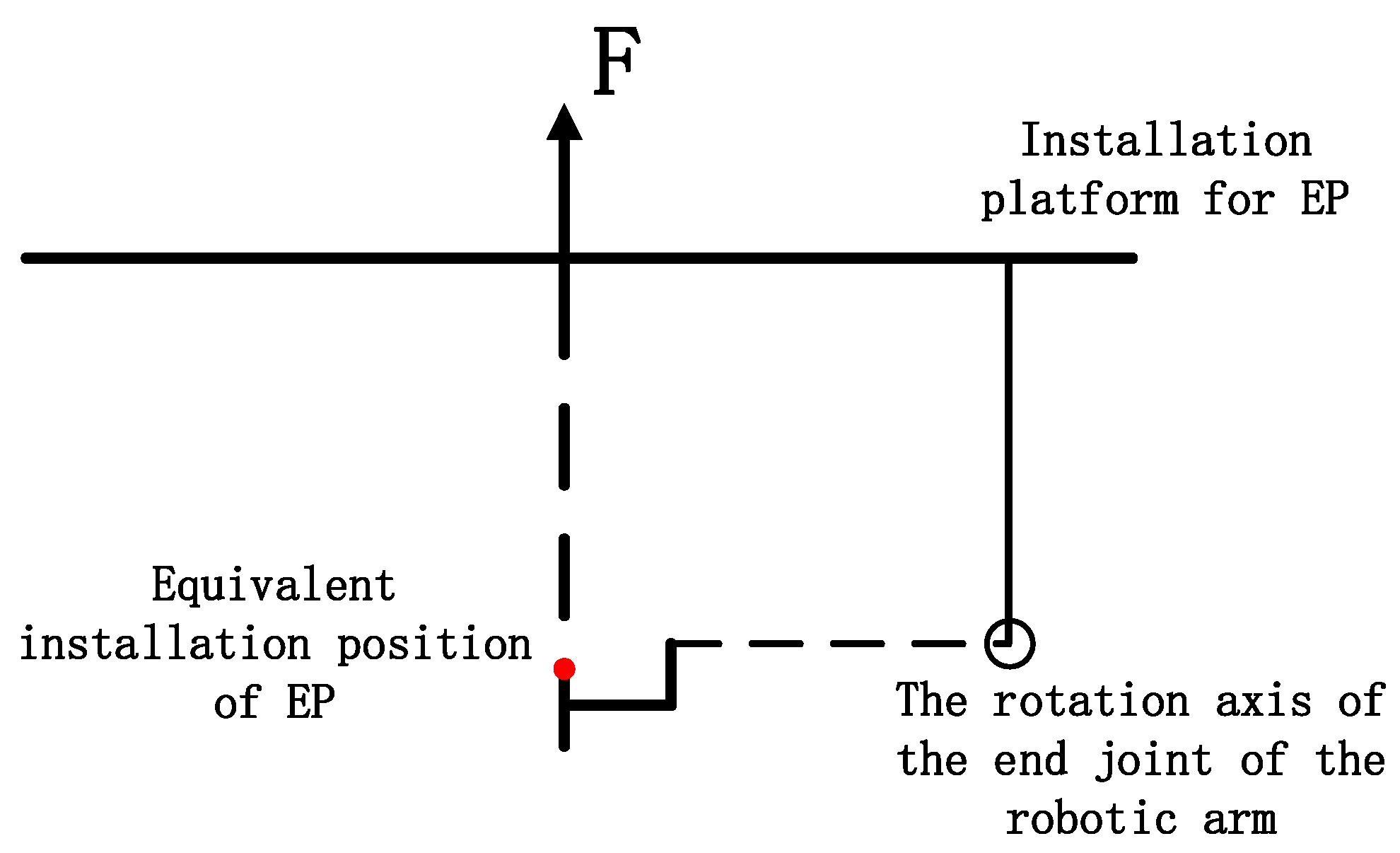
2.3.1. Connection between EP and a Mechanical Arm
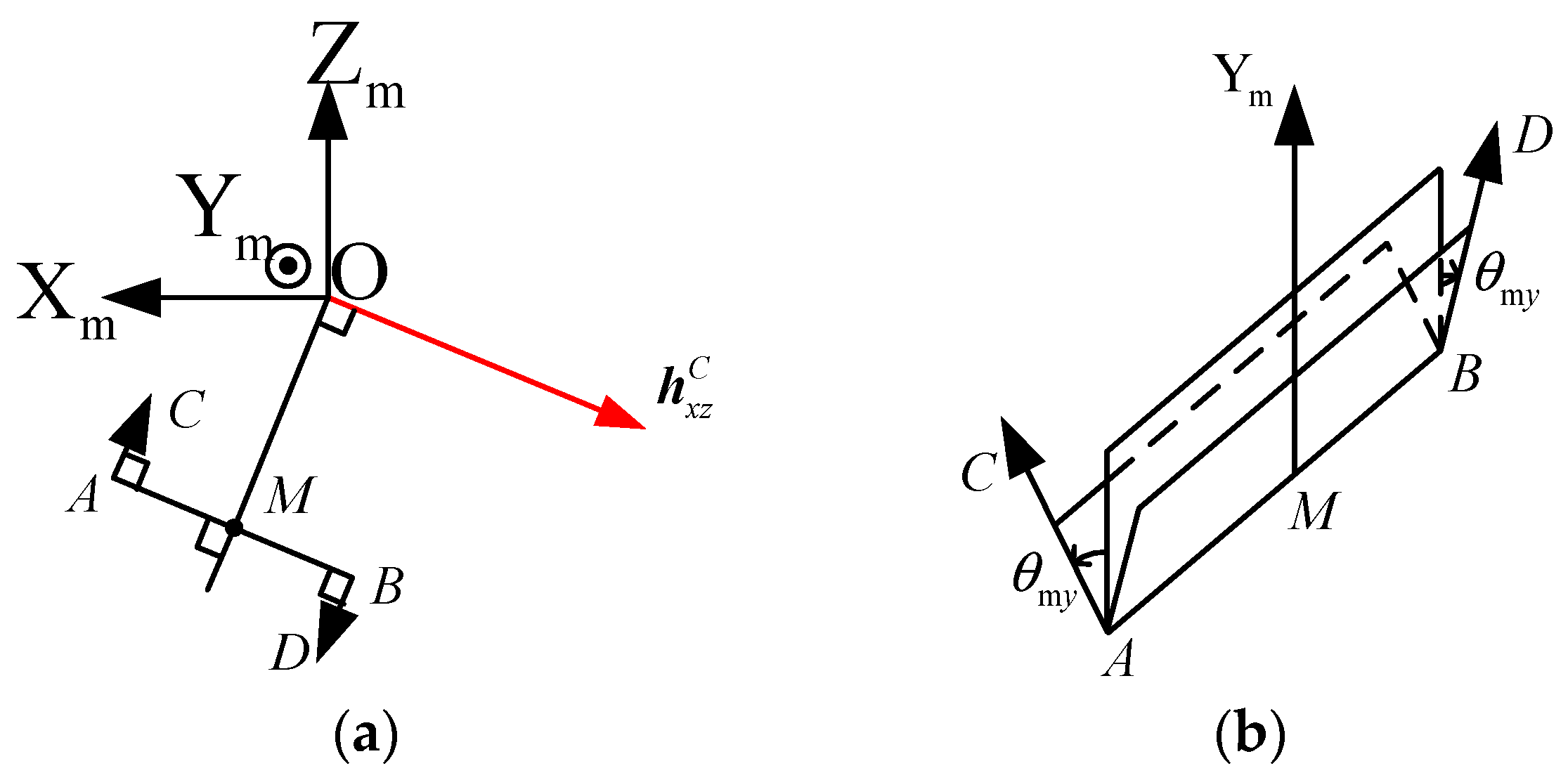
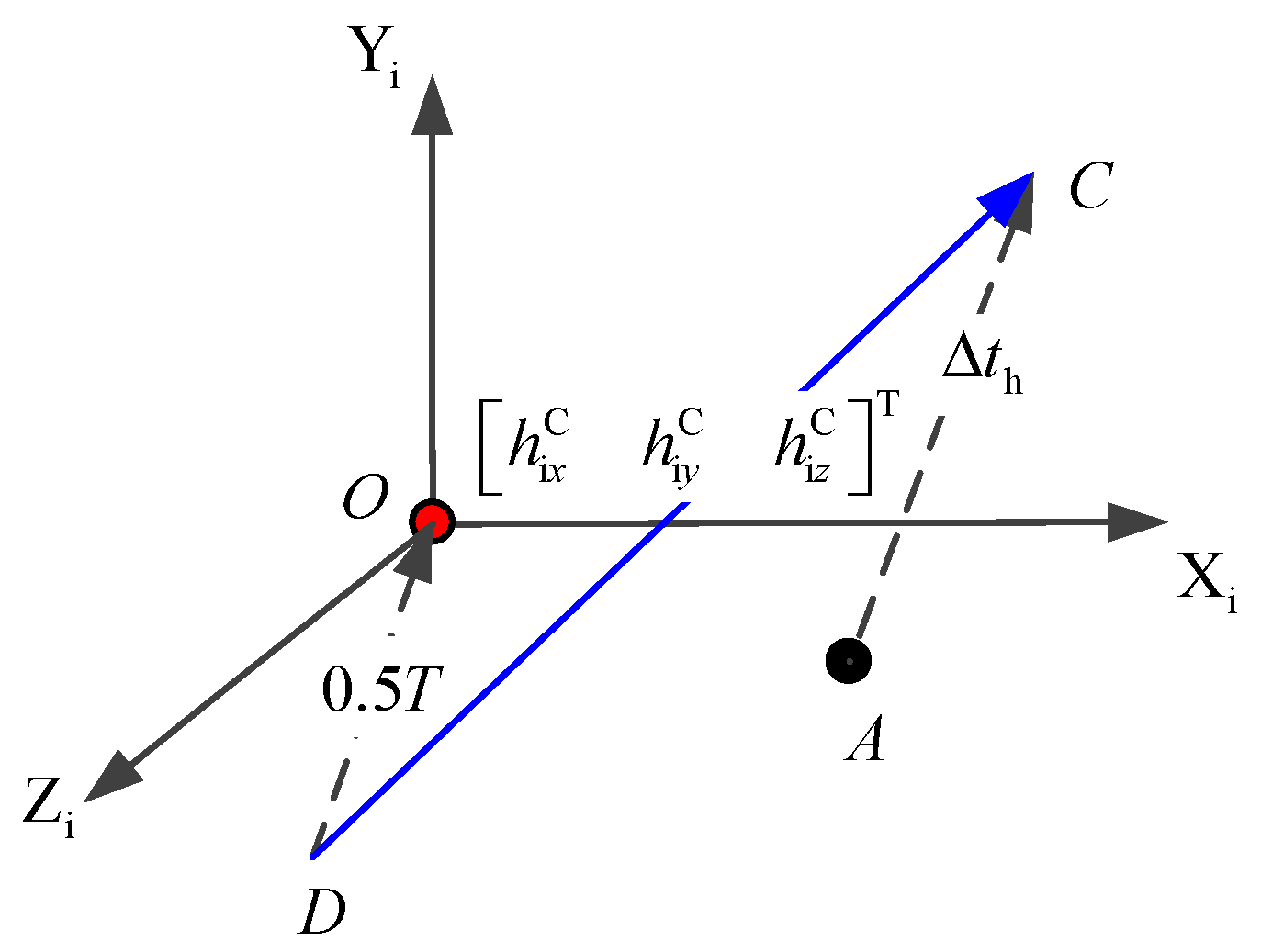
2.3.2. Position and Attitude Calculation of EP in the Mechanical Arm Coordinate System
2.3.3. Position and Attitude Calculation of EP in the Satellite Body Coordinate System
2.4. Angular Momentum Unloading in the Case of Attitude Offset
2.5. Fuel Consumption Analysis for Angular Momentum Unloading
3. Simulation Result
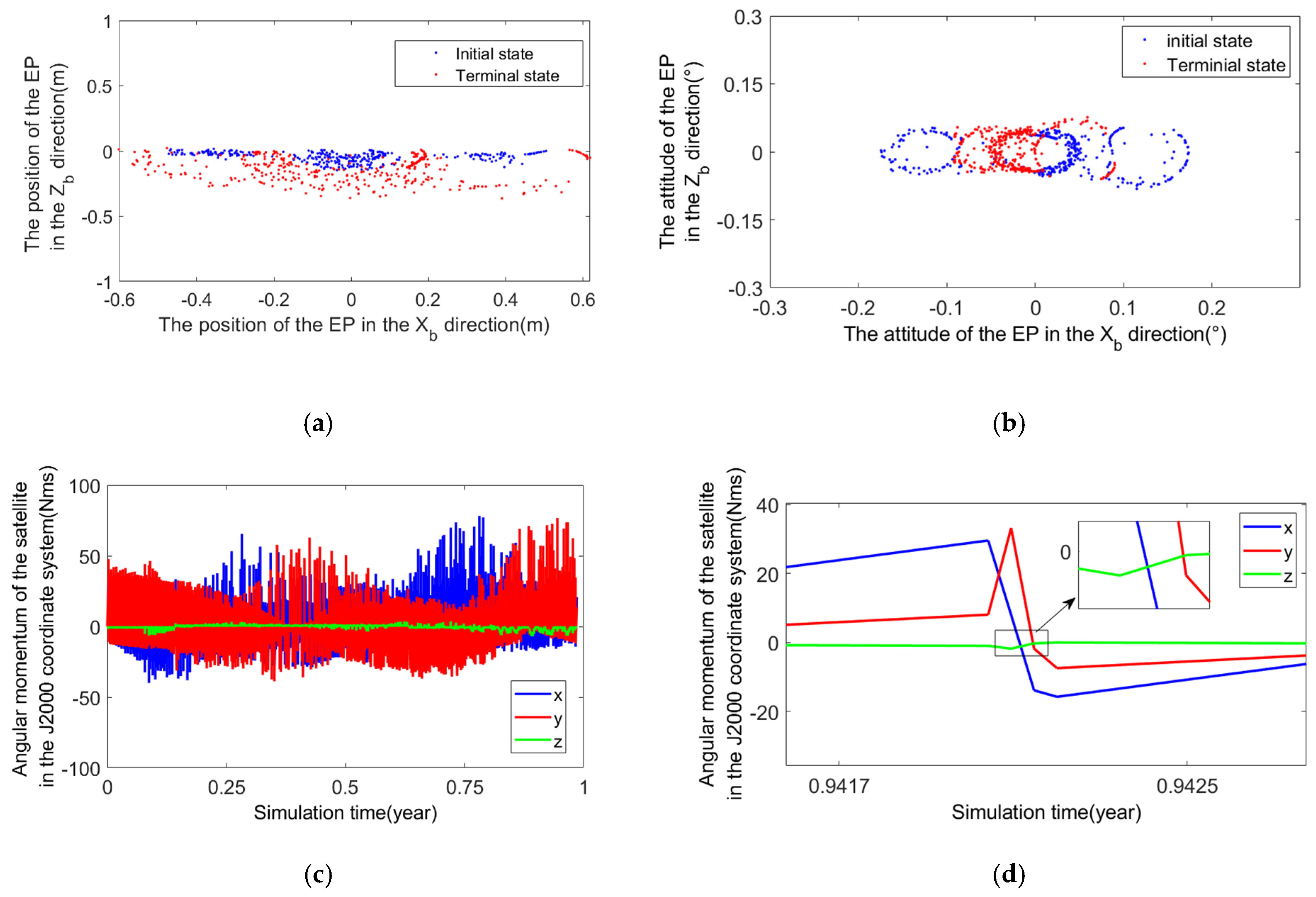
3.1. Simulation of Angular Momentum Unloading without Attitude Offset
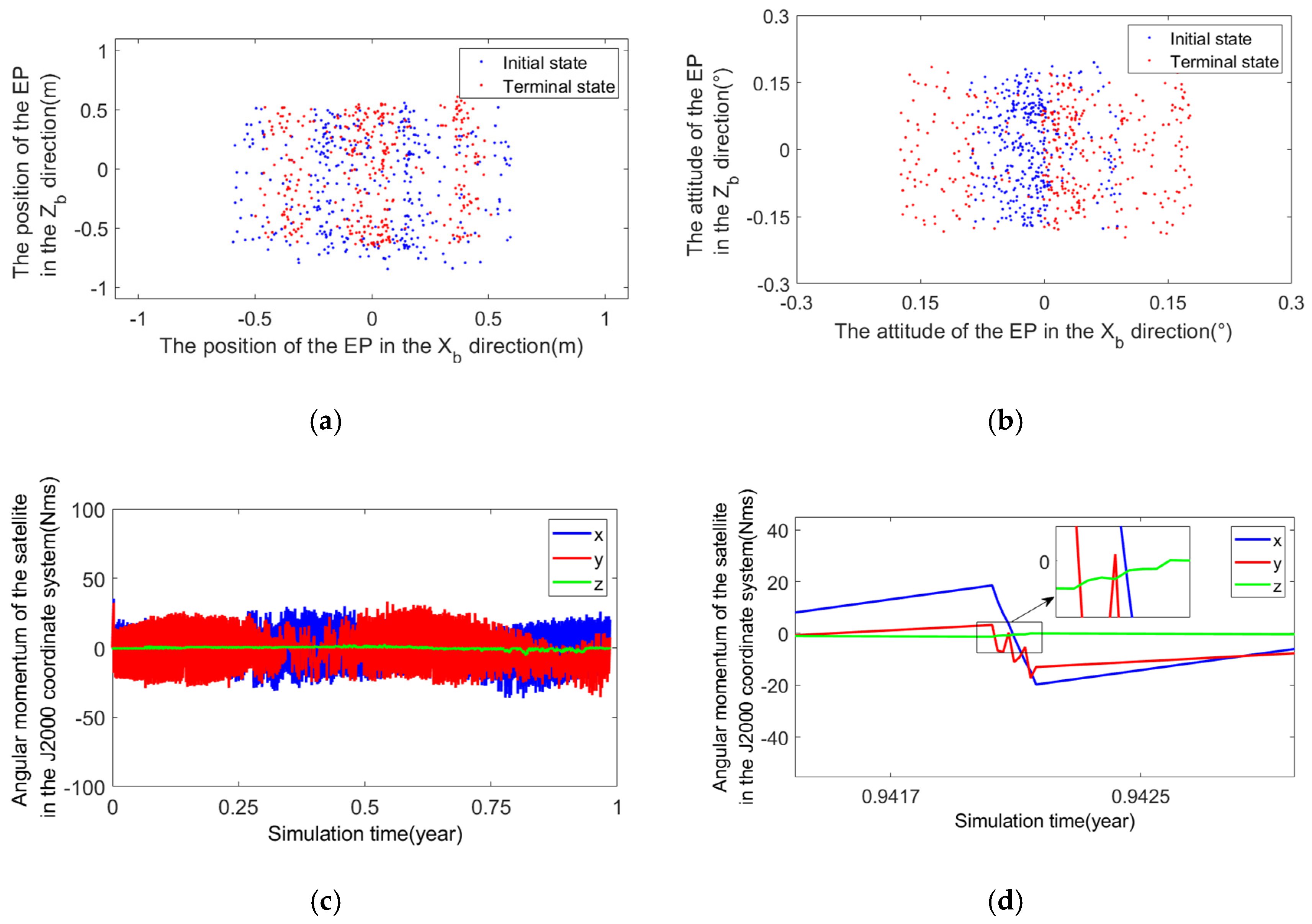
3.2. Simulation of Angular Momentum Unloading with Attitude Offset
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Walsh, A.; Cairano, D.; Weiss, A. MPC for coupled station keeping, attitude control, and momentum management of low-thrust geostationary satellites. In Proceedings of the 2016 Annual American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 7408–7413. [Google Scholar]
- Ma, X.; Han, D.; Tang, L. Research on angular momentum unloading of electric propulsion satellites. China Space Sci. Technol. 2016, 36, 70–76. [Google Scholar]
- Weiss, A.; Cairano, D. Station Keeping and Momentum Management of Low-thrust Satellites Using MPC. Aerosp. Sci. Technol. 2018, 76, 229–241. [Google Scholar] [CrossRef]
- Weiss, A.; Kalabic, U.; Cairano, S. Model Predictive Control for Simultaneous Station keeping and Momentum Management of Low-thrust Satellites. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 2305–2310. [Google Scholar]
- Li, C.; Xu, B.; Zhou, W.; Peng, Q. Geostationary station-keeping of electric-propulsion satellite equipped with robotic arms. Aerospace 2022, 9, 182. [Google Scholar] [CrossRef]
- Frederik, J.; Bruijn, D. Geostationary Satellite Station-Keeping Using Convex Optimization. J. Guid. Control Dyn. 2015, 39, 605–616. [Google Scholar]
- Gazzino, C.; Arzelier, D.; Cerri, L.; Losa, D.; Louembet, C.; Pittet, C. A Three-step Decomposition Method for Solving the Minimum-fuel Geostationary Station Keeping of Satellites Equipped with Electric Propulsion. Acta Astronatica 2019, 158, 12–22. [Google Scholar] [CrossRef]
- Gazzino, C.; Arzelier, D.; Losa, D.; Louembet, C.; Pittet, C.; Cerri, L. Optimal Control for Minimum-fuel Geostationary Station Keeping of Satellites Equipped with Electric Propulsion. IFAC PapersOnLine 2016, 49, 379–384. [Google Scholar] [CrossRef]
- Gazzino, C.; Louembet, C.; Arzelier, D.; Jozefowiez, N.; Losa, D.; Cerri, C.P. Interger Programming for Optimal Control of Geostationary Station Keeping of Low-thrust Satellites. In Proceedings of the 20th IFAC World Congress 2017, Toulouse, France, 9–14 July 2017. [Google Scholar]
- Ye, L.; Wang, J.; Baoyin, H. Constellation maintenance and capture of sun-synchronous frozen orbits. Space Control Technol. Appl. 2021, 47, 24–32. [Google Scholar]
- Sukhanov, A.A.; Prado, A.F. On one Approach to the Optimization of Low-thrust Station Keeping Manoeuvres. Adv. Space Res. 2012, 50, 1478–1488. [Google Scholar] [CrossRef]
- Roth, M. Strategies for Geostationary Spacecraft Orbit SK Using Electrical Propulsion Only. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2020. [Google Scholar]
- Ogawa, N.; Terui, F.; Mimasu, Y.; Yoshikawa, K.; Ono, G.; Yasuda, S.; Matsushima, K.; Masuda, T.; Hihara, H.; Sano, J.; et al. Image-based autonomous navigation of Hayabusa2 using artificial landmarks: The design and brief in-flight results of the first landing on asteroid Ryugu. Astrodyn 2020, 4, 89–103. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, S. Non-equatorial equilibrium points around an asteroid with gravitational orbit-attitude coupling perturbation. Astrodyn 2020, 4, 1–16. [Google Scholar] [CrossRef]
- Zhang, T.J.; Wolz, D.; Shen, H.X.; Luo, Y.-Z. Spanning tree trajectory optimization in the galaxy space. Astrodyn 2021, 5, 27–37. [Google Scholar] [CrossRef]
- Ye, L.; Liu, C.; Zhu, W.; Yin, H.; Liu, F.; Baoyin, H. North/south Station Keeping of the GEO Satellites in Asymmetric Configuration by Electric Propulsion with Manipulator. Mathematics 2022, 10, 2340. [Google Scholar] [CrossRef]
- Liu, F.; Ye, L.; Liu, C.; Wang, J.; Yin, H. Micro-thrust, Low-fuel Consumption, and High-precision East/west Station Keeping for GEO Satellites based on Synovial Variable Structure Control. Mathematics 2023, 11, 705. [Google Scholar] [CrossRef]
- Ye, L.; Liu, C.; Liu, F.; Yin, H.; Zhang, W.; Baoyin, H. The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude. Aerospace 2023, 10, 135. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameter |
|---|---|
| Coordinate System | J2000 Coordinate System |
| Orbital Epoch (UTC) | 1 August 2025 12:00:00 |
| Semi-major Axis (km) | 42,166.3 |
| Eccentricity | 0.0001 |
| Inclination (°) | 0.08 |
| Argument of Perigee (°) | 0 |
| RAAN (°) | 359.989 |
| Mean Anomaly (°) | 251.361 |
| Mean Longitude (°) | 121.019 |
| Mass of Satellite (kg) | 3000 |
| 1.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Qin, J.; Zhu, Q.; Liu, C.; Yin, H.; Ye, L.; Liu, F. The Angular Momentum Unloading of the Asymmetric GEO Satellite by Using Electric Propulsion with a Mechanical Arm. Aerospace 2024, 11, 290. https://doi.org/10.3390/aerospace11040290
Zhu H, Qin J, Zhu Q, Liu C, Yin H, Ye L, Liu F. The Angular Momentum Unloading of the Asymmetric GEO Satellite by Using Electric Propulsion with a Mechanical Arm. Aerospace. 2024; 11(4):290. https://doi.org/10.3390/aerospace11040290
Chicago/Turabian StyleZhu, Hong, Jie Qin, Qinghua Zhu, Chunyang Liu, Haining Yin, Lijun Ye, and Fucheng Liu. 2024. "The Angular Momentum Unloading of the Asymmetric GEO Satellite by Using Electric Propulsion with a Mechanical Arm" Aerospace 11, no. 4: 290. https://doi.org/10.3390/aerospace11040290
APA StyleZhu, H., Qin, J., Zhu, Q., Liu, C., Yin, H., Ye, L., & Liu, F. (2024). The Angular Momentum Unloading of the Asymmetric GEO Satellite by Using Electric Propulsion with a Mechanical Arm. Aerospace, 11(4), 290. https://doi.org/10.3390/aerospace11040290