Collaborative Localization Method Based on Hybrid Network for Aerial Swarm


Abstract
1. Introduction
2. Construction of Hybrid Measurement Network for Aerial Swarm
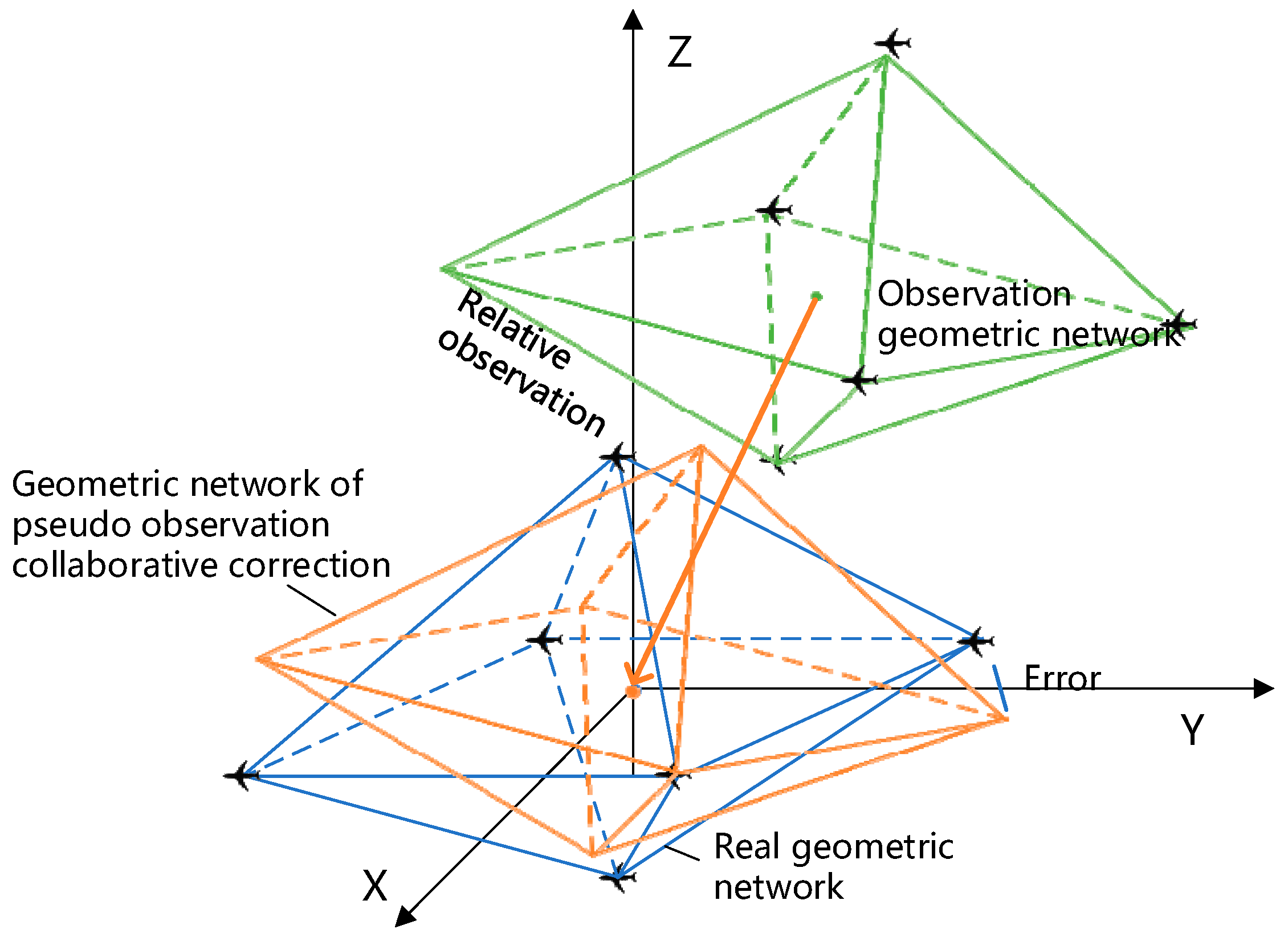
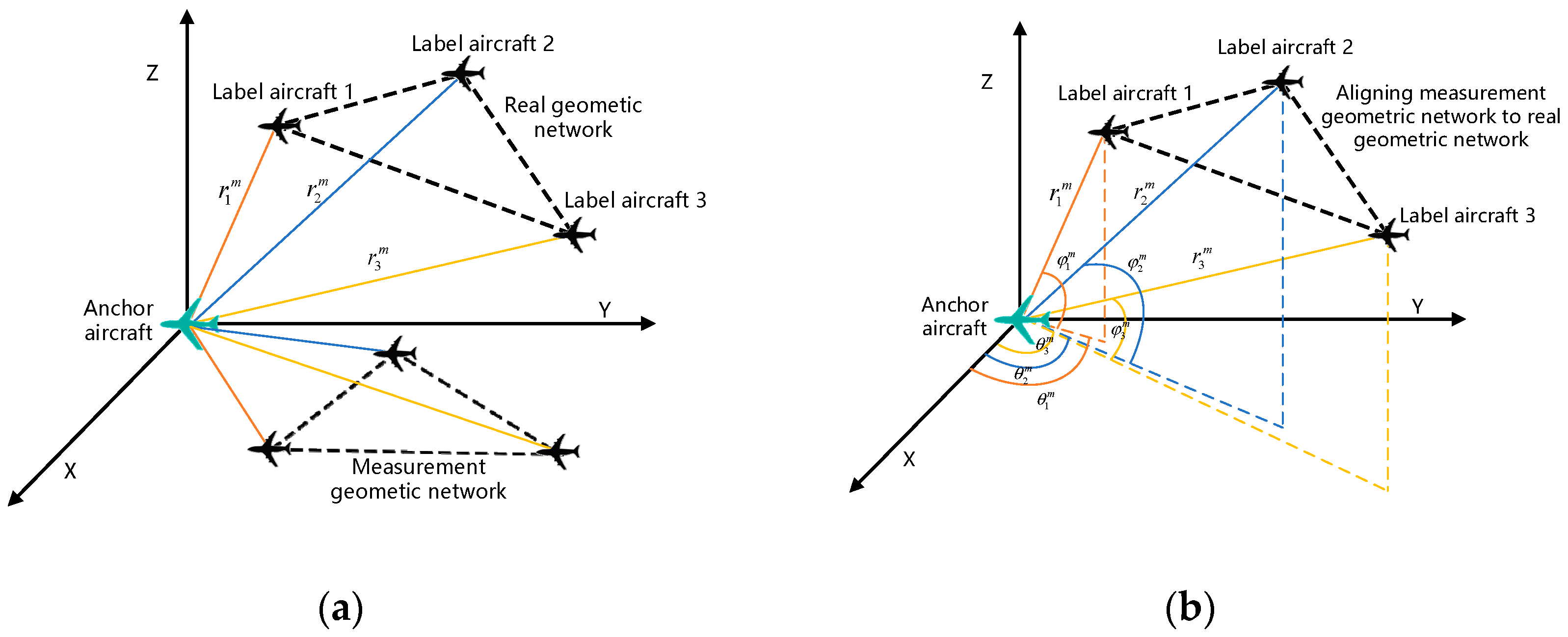
2.1. Network by Relative Measurement
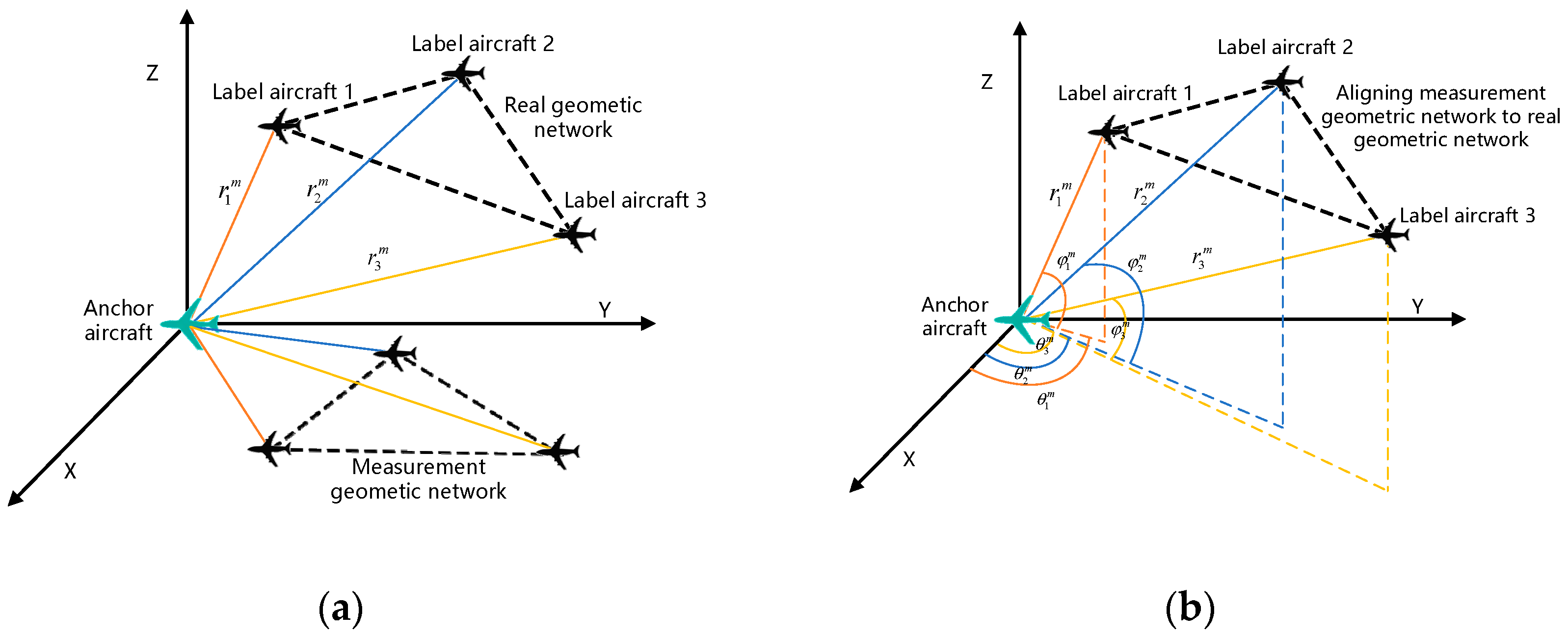
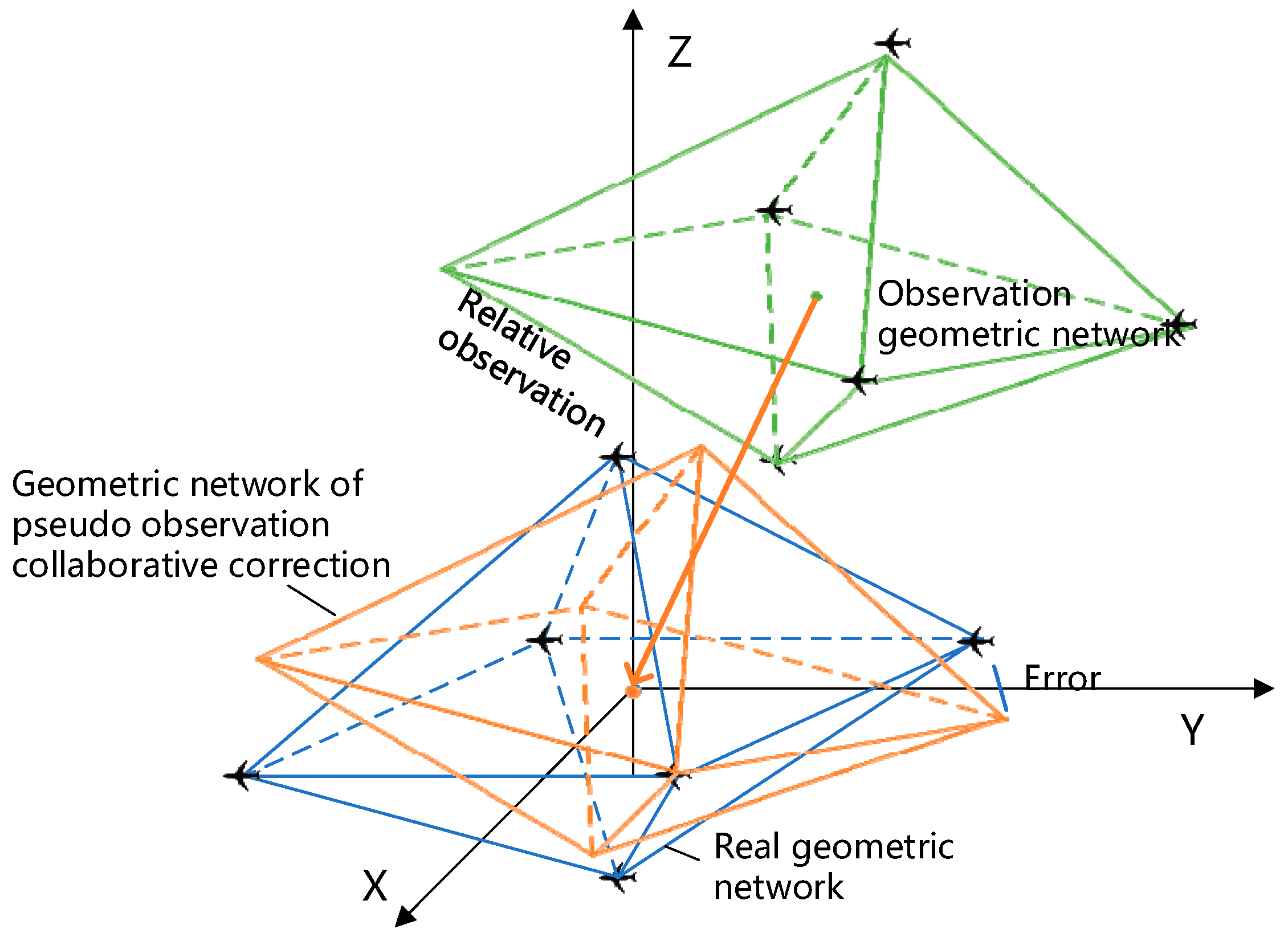
2.2. Observation Geometry with Anchors
3. Collaborative Localization with Hybrid Measurement Network
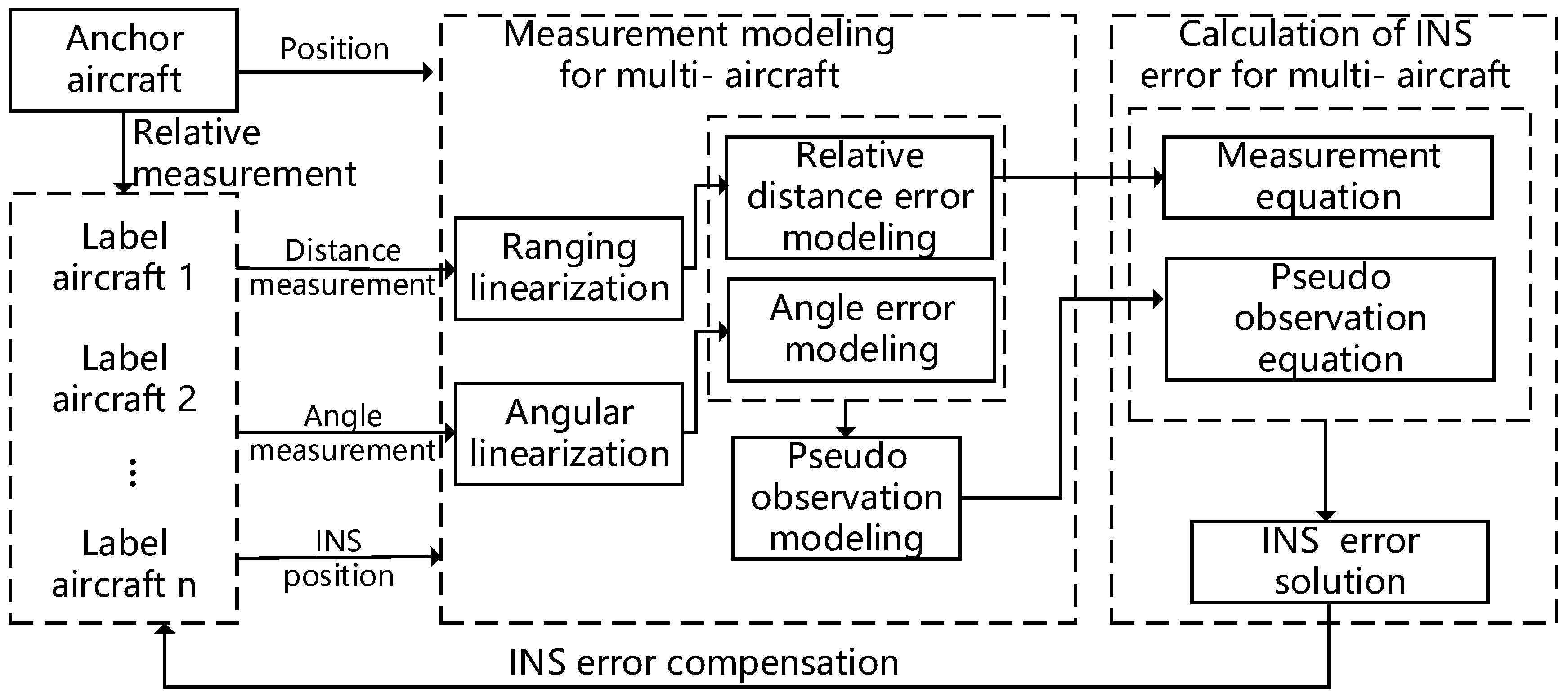
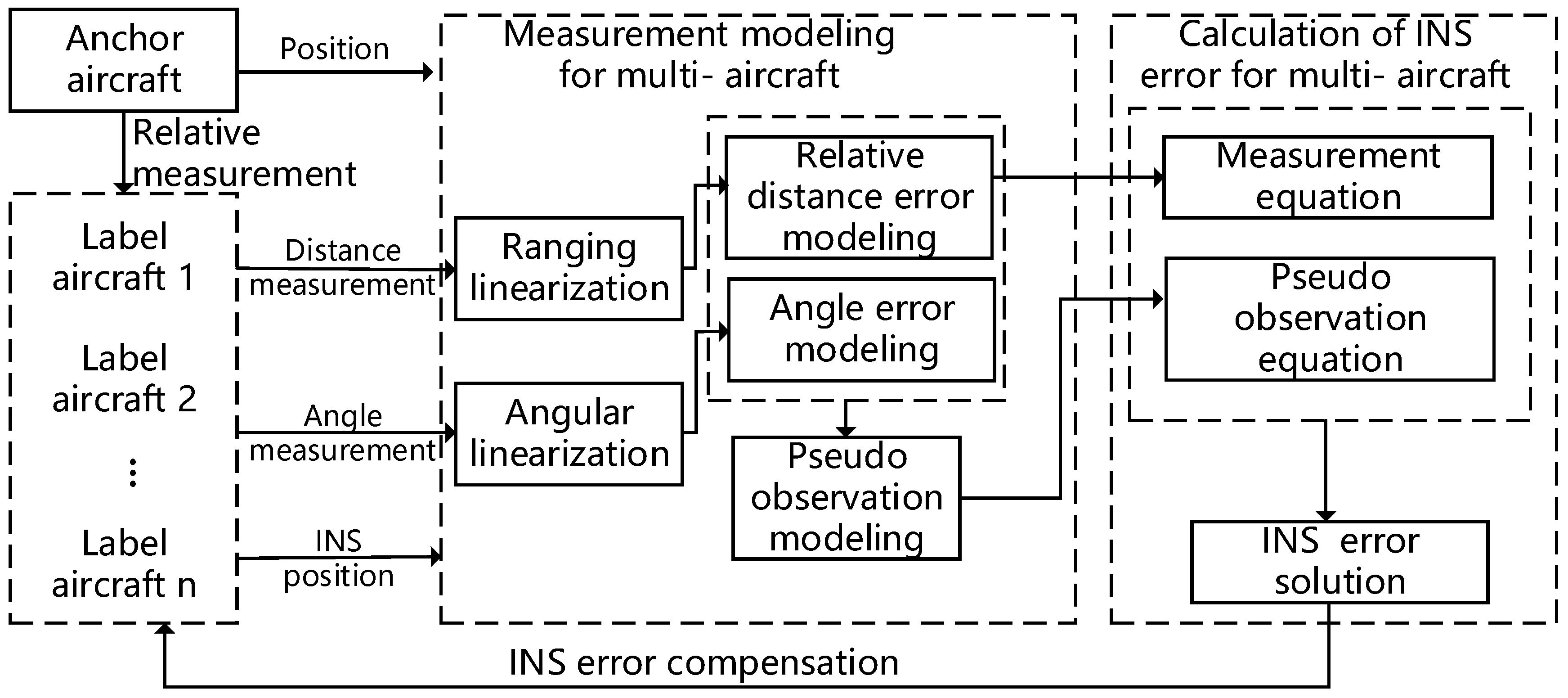
3.1. Airborne Navigation Scheme with Measurement Network
3.2. Modeling of Measurement Network for Aerial Swarm
3.3. Collaborative Localization According to Measurement Network
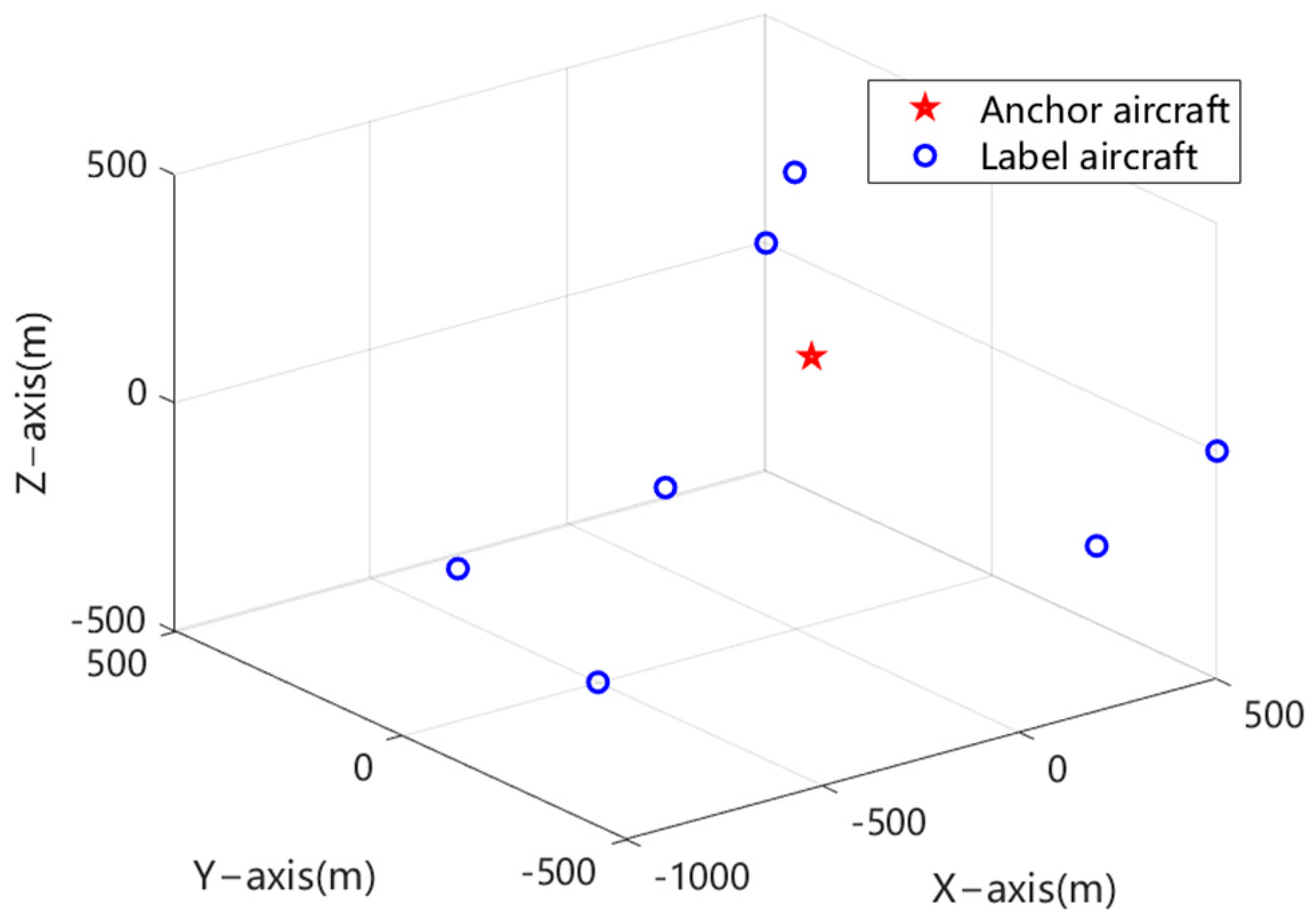
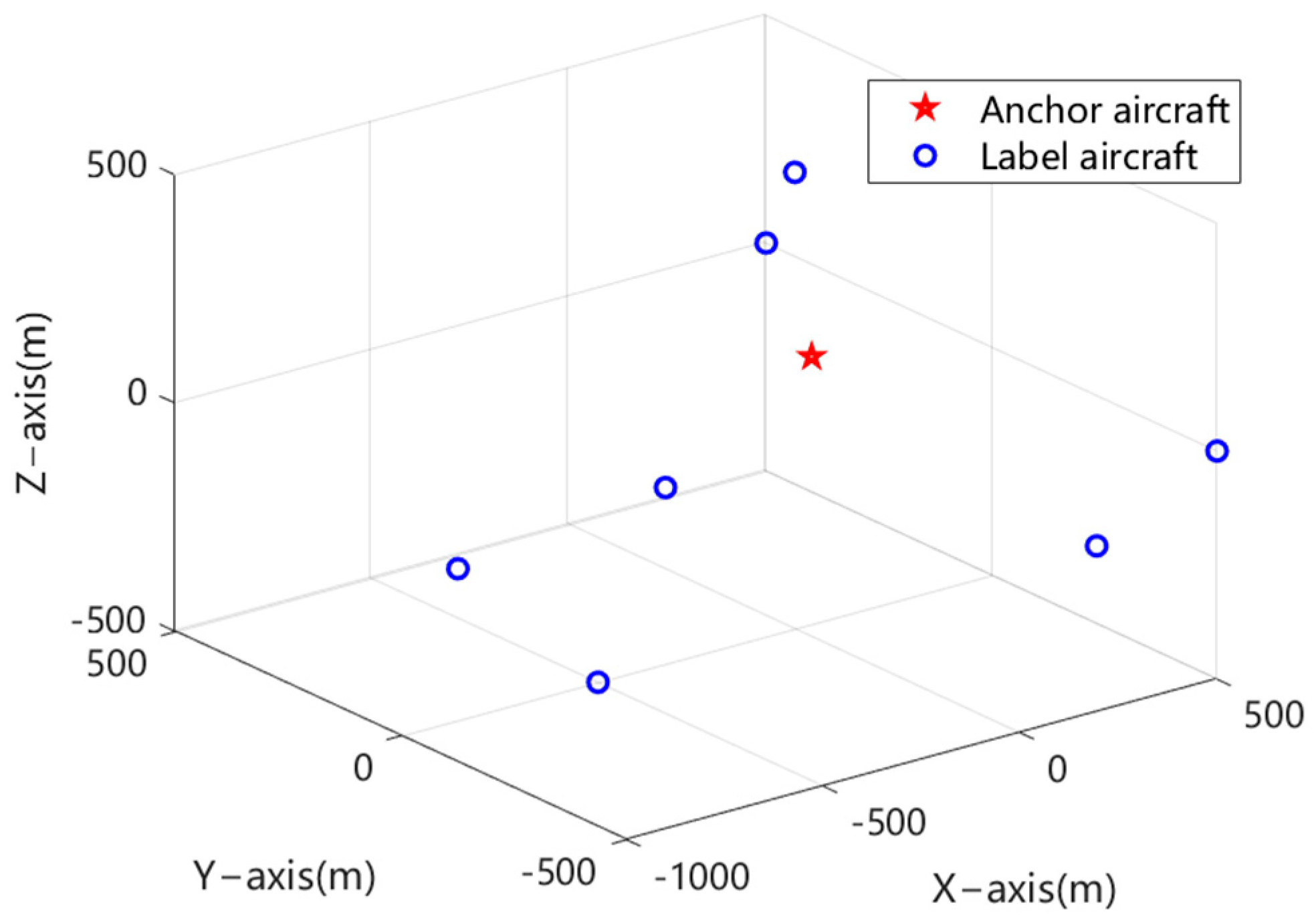
4. Simulation and Analysis
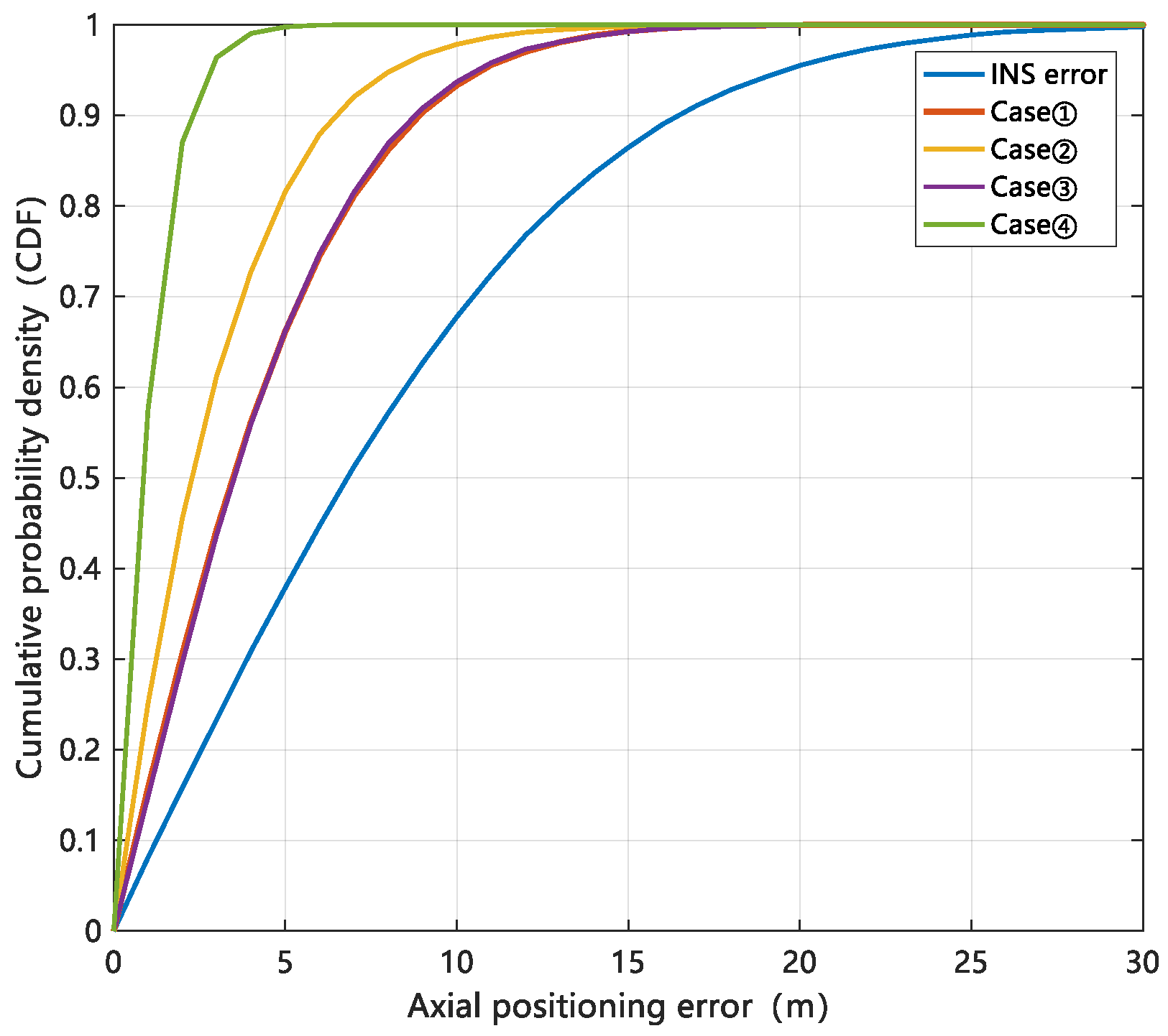
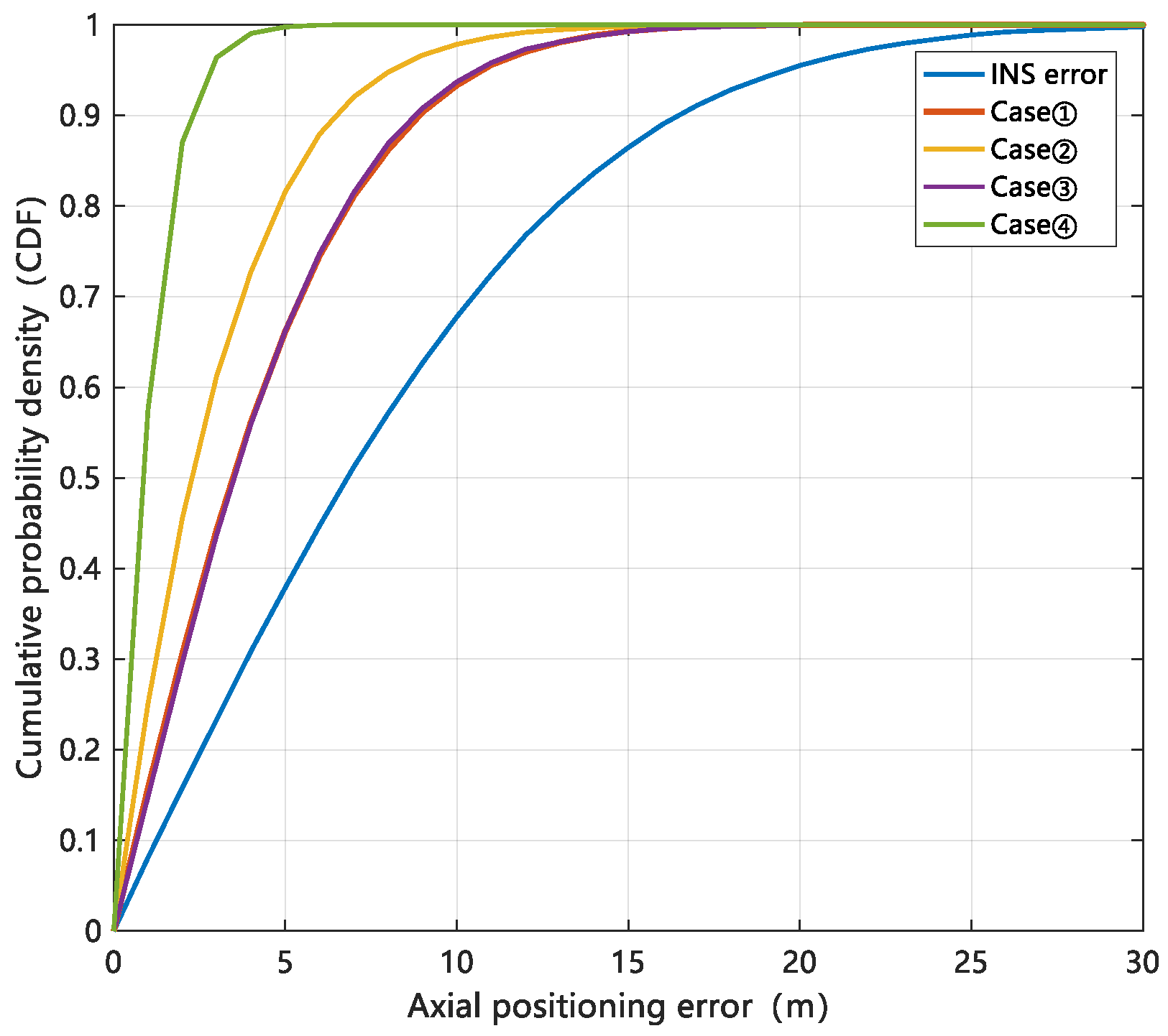
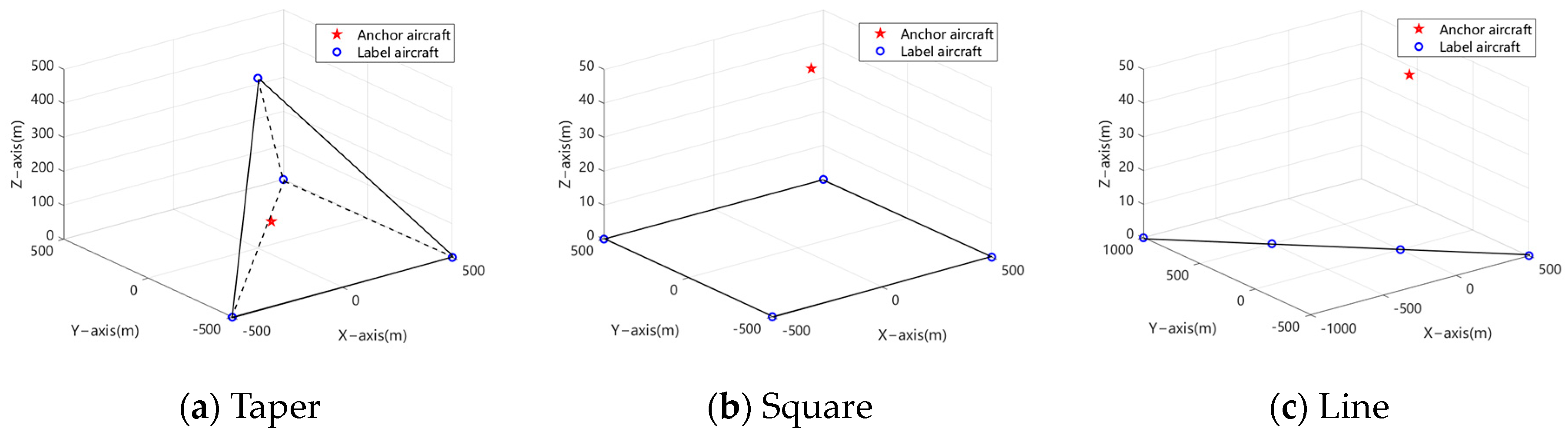
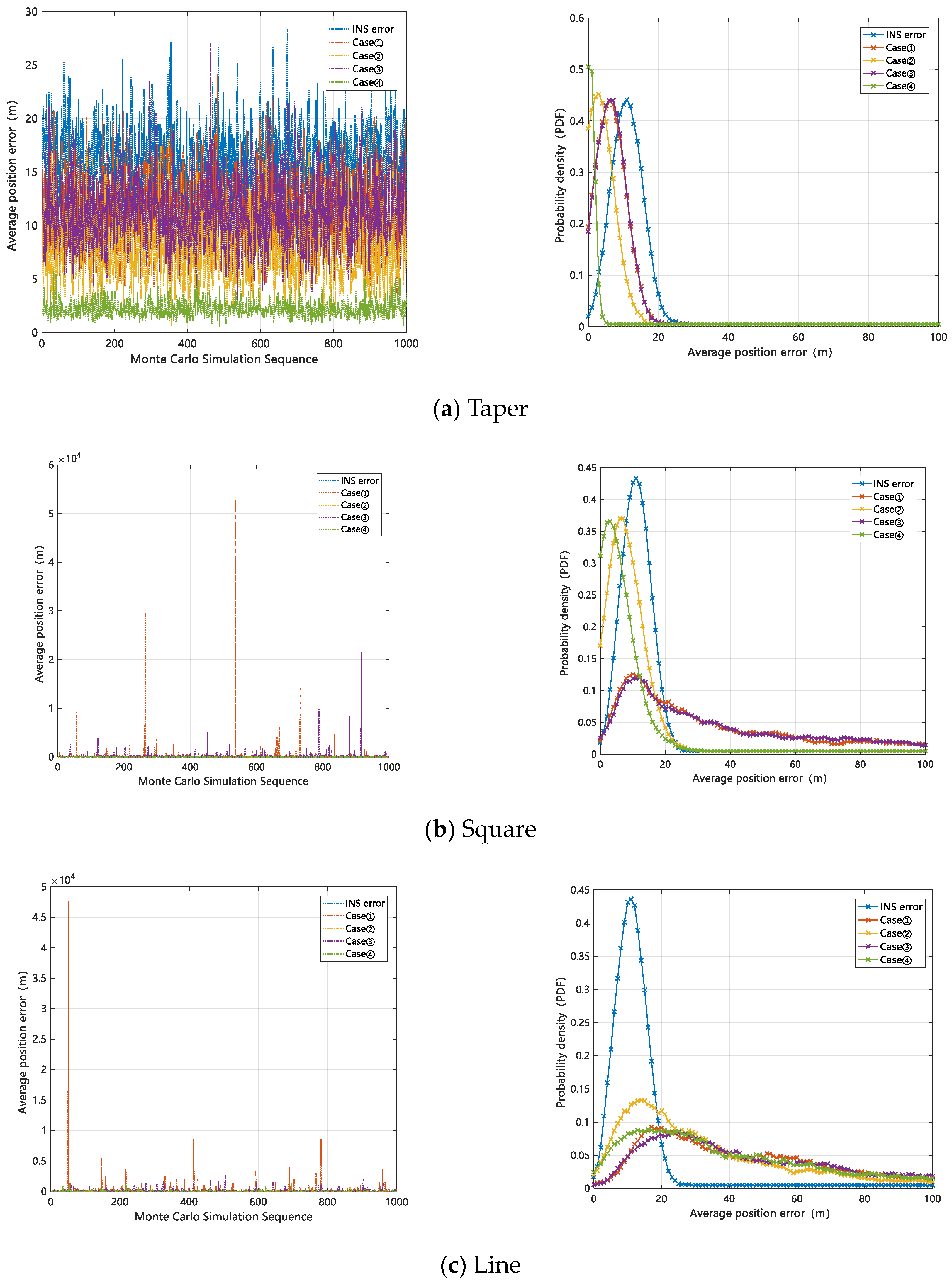
4.1. Analysis of Collaboration Mode with Hybrid Measurements
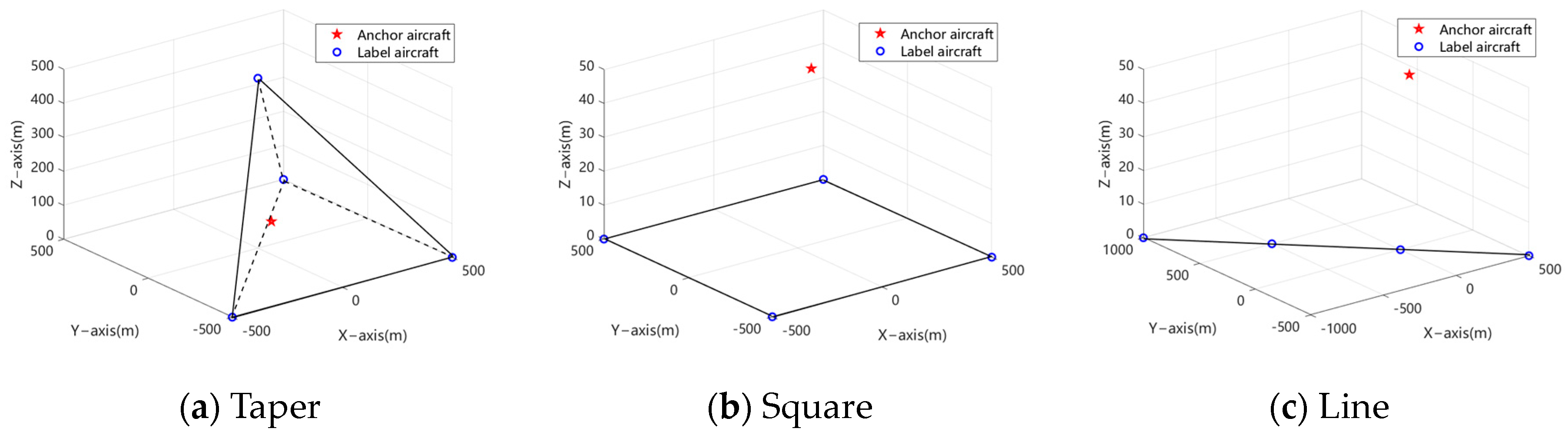
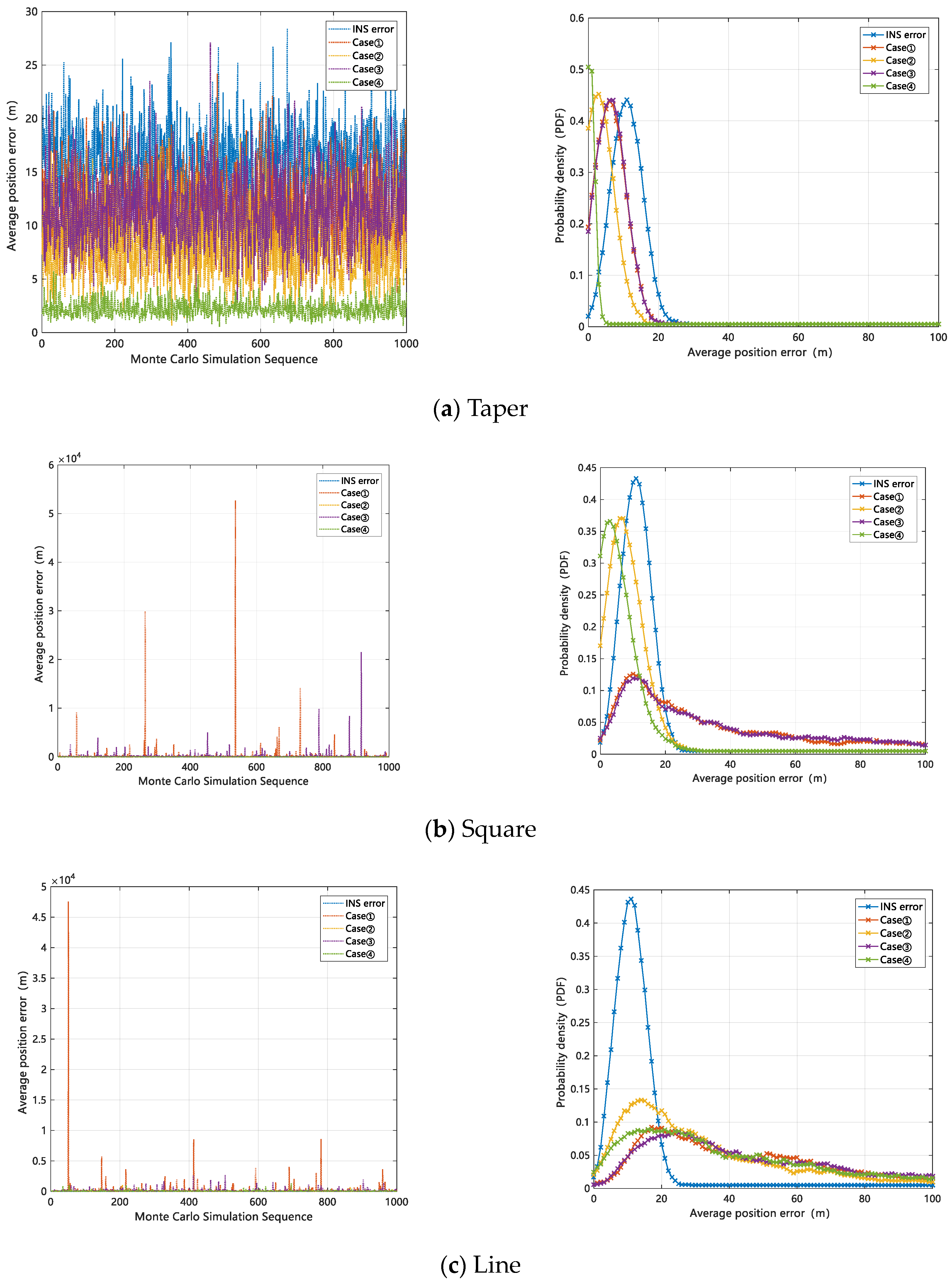
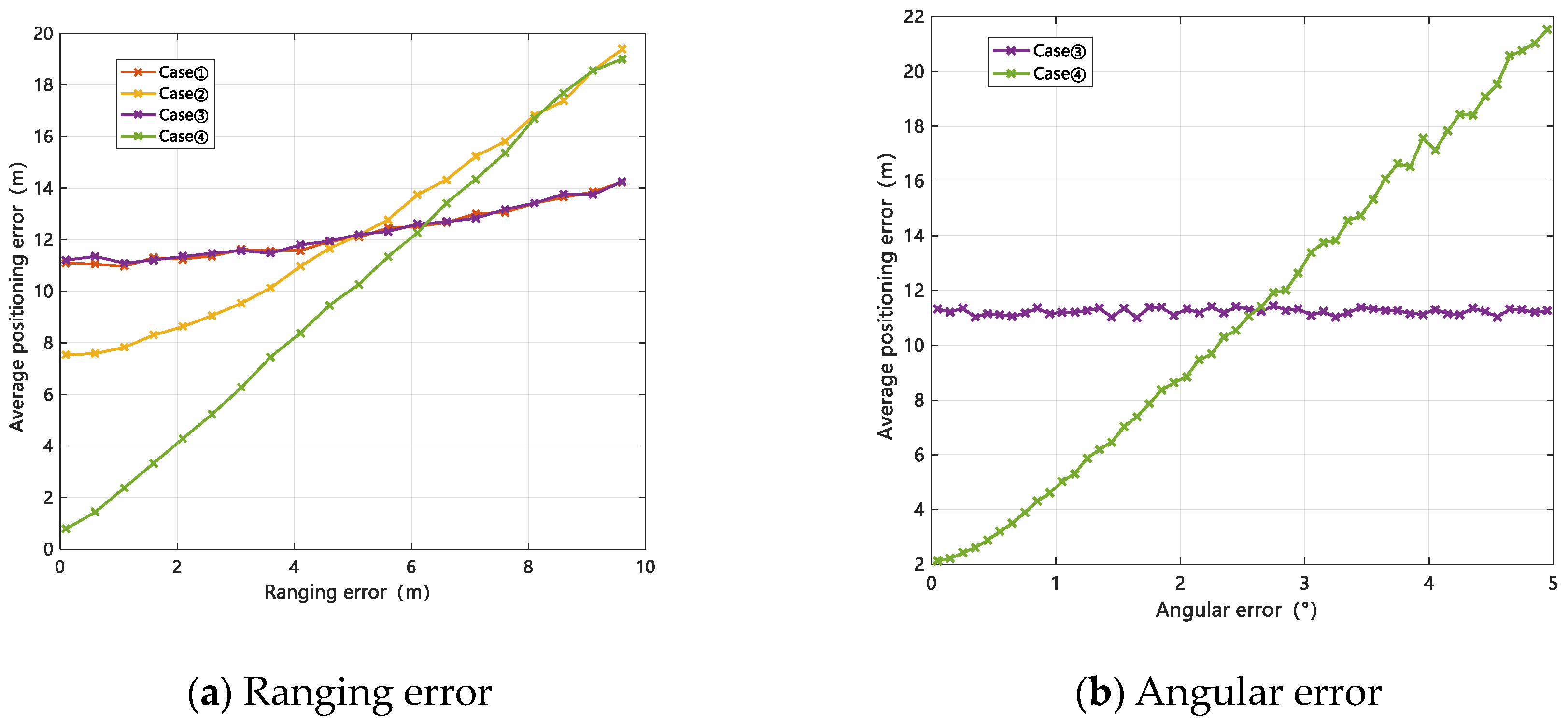
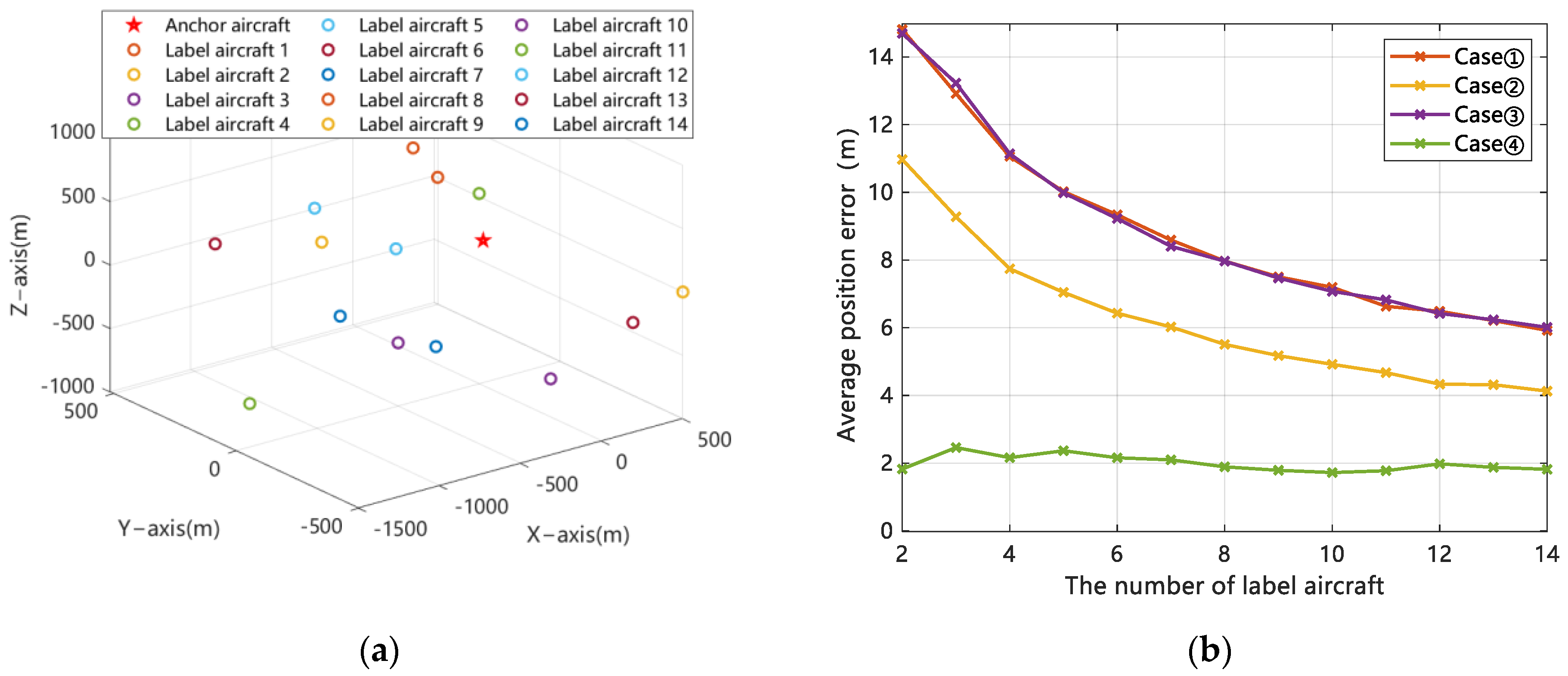
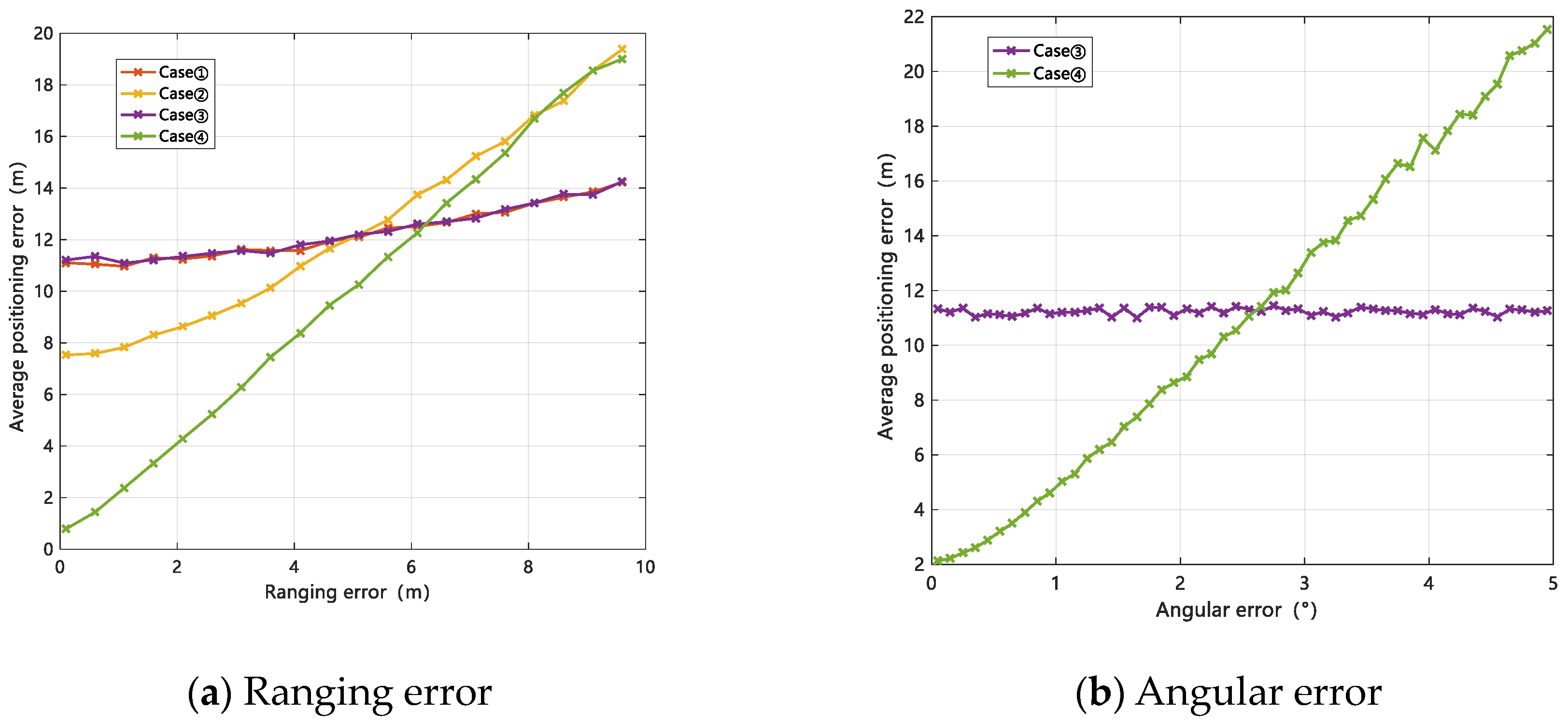
4.2. Analysis of Influential Factors on Collaborative Performance
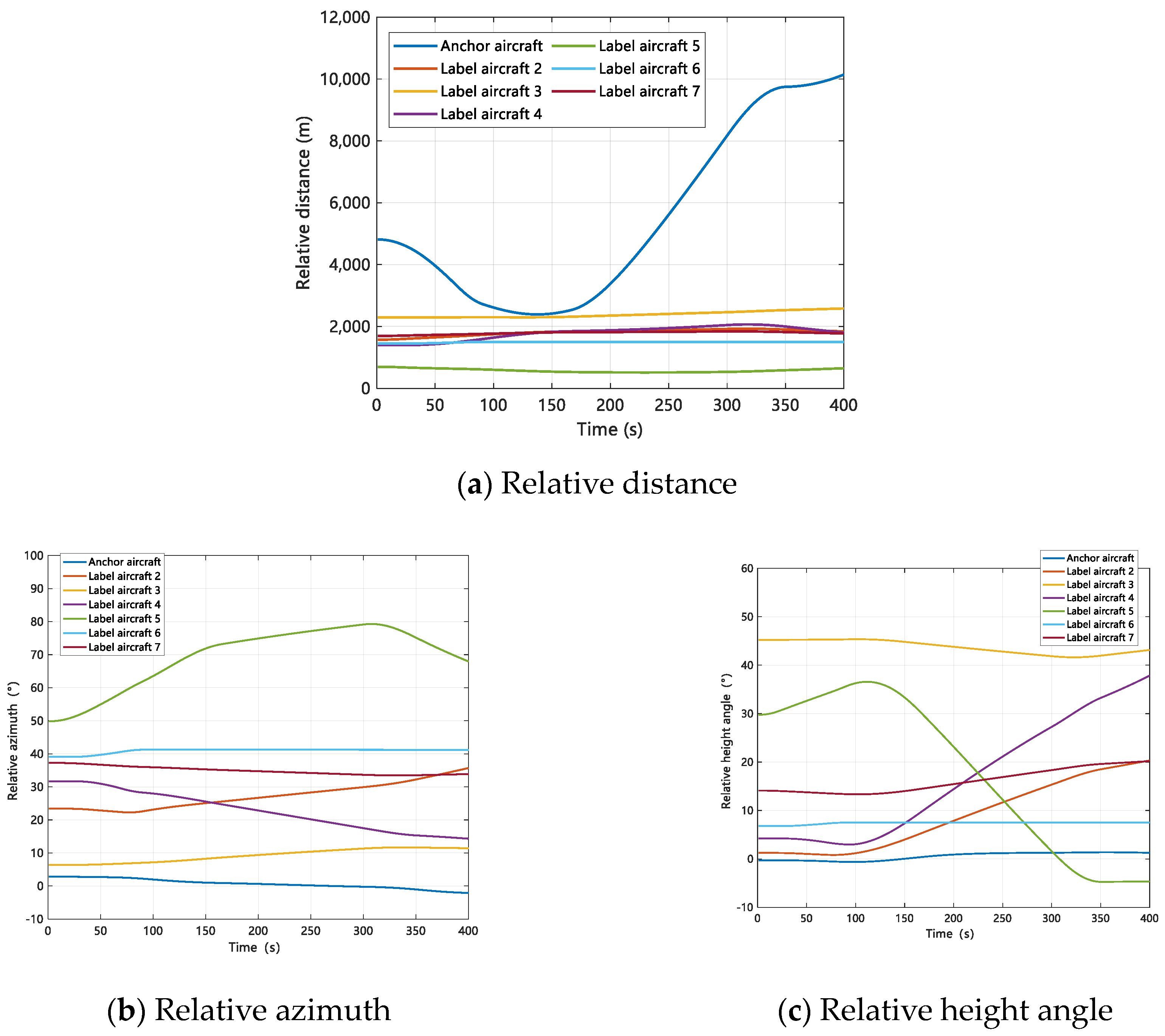
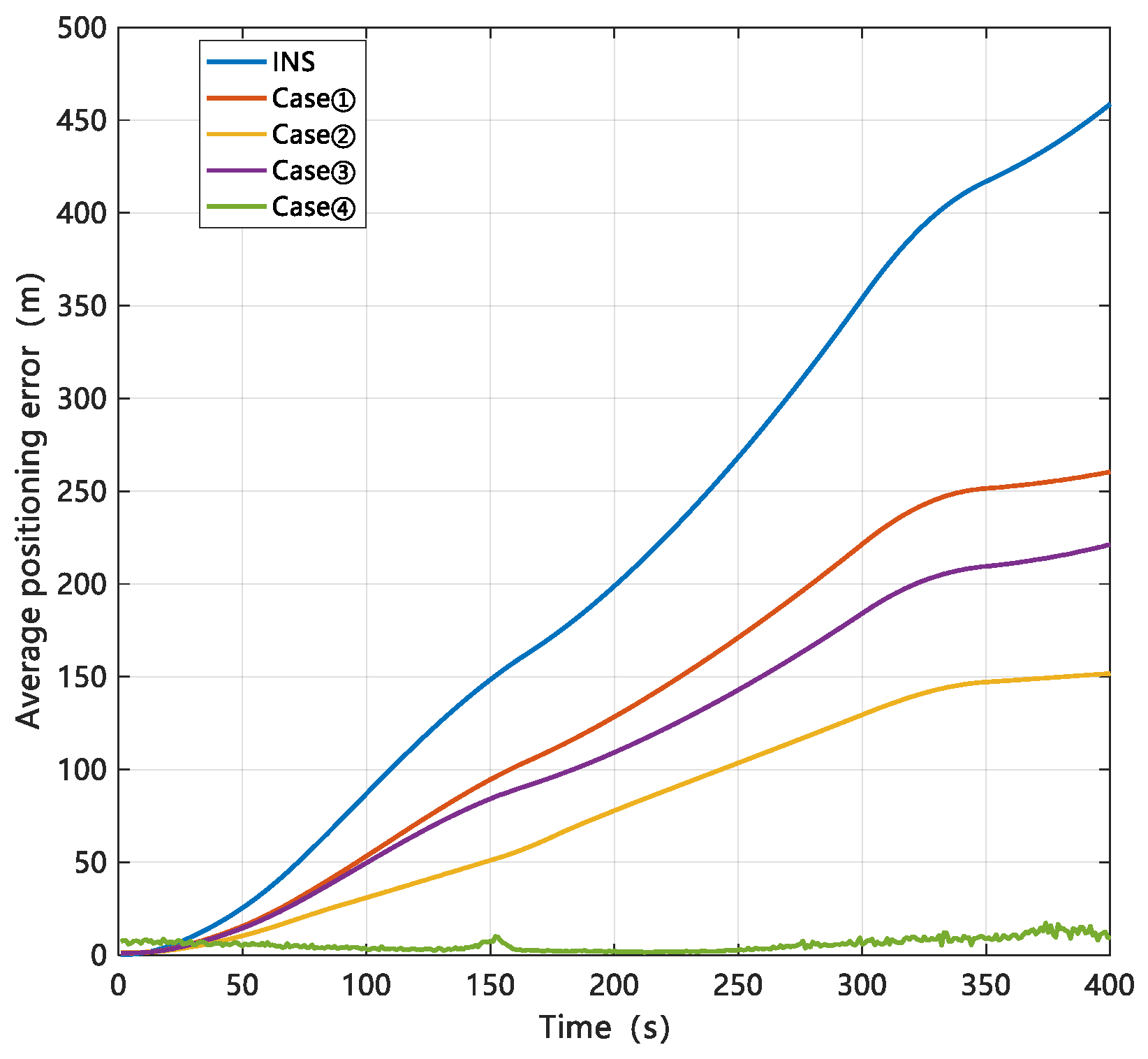
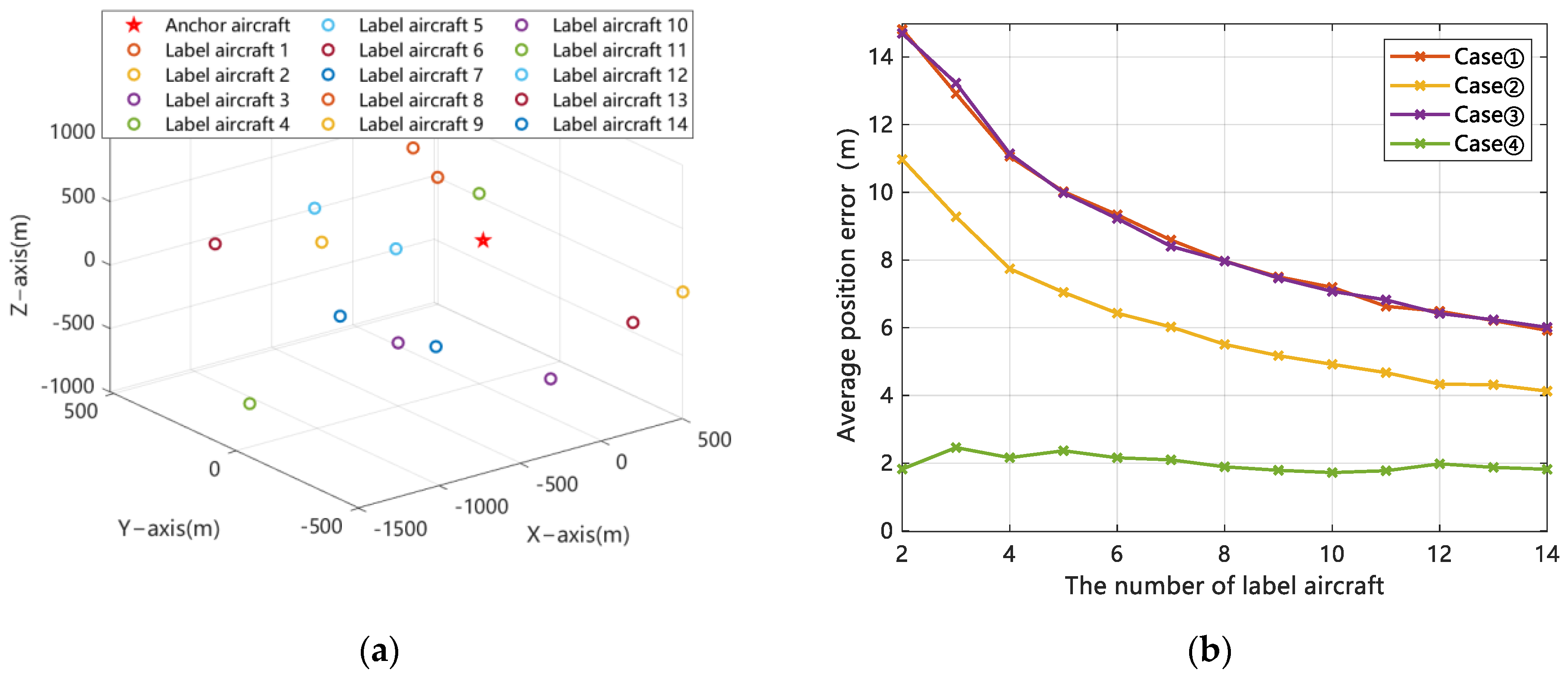
4.3. Analysis of Collaborative Navigation Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; You, X.; Wu, G.; Hassan, M.M.; Almogren, A.; Guna, J. Application of reinforcement learning in UAV cluster task scheduling. Future Gener. Comput. Syst. 2019, 95, 140–148. [Google Scholar] [CrossRef]
- Shao, Y.; Luo, Q.; Liu, C.; Yan, X.; Yang, K. A multi-AUV cooperative navigation method. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1207, 012002. [Google Scholar] [CrossRef]
- Kim, C.; Won, J.S. A Fuzzy Analytic Hierarchy Process and Cooperative Game Theory Combined Multiple Mobile Robot Navigation Algorithm. Sensors 2020, 20, 2827. [Google Scholar] [CrossRef] [PubMed]
- Causa, F.; Opromolla, R.; Fasano, G. Cooperative navigation and visual tracking with passive ranging for UAV flight in GNSS challenging environments. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; p. 1109. [Google Scholar]
- Xie, P.; Kang, F.; Wang, Y. Cooperative navigation for multi-UUV using relative observations. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; pp. 3191–3194. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, D.; Liu, M. Cooperative Navigation Algorithm for Two Leaders GUUV. In Proceedings of the 2011 Fourth International Conference on Intelligent Computation Technology and Automation, Shenzhen, China, 28–29 March 2011; pp. 970–973. [Google Scholar] [CrossRef]
- Nicholson, J.W.; Healey, A.J. The present state of autonomous underwater vehicle (AUV) application and technologies. Mar. Technol. Soc. J. 2008, 42, 44–51. [Google Scholar] [CrossRef]
- Zhang, F.; Bao, H.; Duan, X.; Shen, J. A multiple AUVs cooperative navigation algorithm considering the effect of ocean current. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 2441–2445. [Google Scholar] [CrossRef]
- Rúa, S.; Vásquez, R.E.; Crasta, N.; Betancur, M.J.; Pascoal, A. Observability analysis for a cooperative range-based navigation system that uses a rotating single beacon. Ocean Eng. 2022, 248, 110697. [Google Scholar] [CrossRef]
- Feng, P. Leader-follower Cooperative Navigation with communication delays for Multi AUVs. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Qi, Y.; Wang, B.; Wang, S.; Fu, M. Cooperative navigation for multiple autonomous underwater vehicles with time delayed measurements. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 295–299. [Google Scholar] [CrossRef]
- Hu, C.; Fu, L.; Yang, Y. Cooperative navigation and control for surface-underwater autonomous marine vehicles. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 589–592. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, L.; Xu, D.; Feng, J. Novel cooperative navigation method for multi-AUVs based on optimal weight distribution method. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Fortmann, T.E.; Bar-Shalsom, Y.; Scheffe, M. Sonar tracking of multiple target using joint probabilistic data association. J. Ocean Eng. 1983, 8, 173–184. [Google Scholar] [CrossRef]
- Sun, X.; Xu, H.; Jiang, J. AUV cooperative navigation algorithm based on factor graph. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 1053–1058. [Google Scholar] [CrossRef]
- Chen, Z.; Mu, H.; Chen, C.-H.; Wu, M.-P. Implement of cooperative navigation in pedestrian navigation based on distance restraint. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 2123–2127. [Google Scholar] [CrossRef]
- Liu, R.; Yuen, C.; Do, T.-N.; Jiao, D.; Liu, X.; Tan, U.-X. Cooperative relative positioning of mobile users by fusing IMU inertial and UWB ranging information. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5623–5629. [Google Scholar] [CrossRef]
- Zhang, S.; Pan, X.; Mu, H. A multi-pedestrian cooperative navigation and positioning method based on UWB technology. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 260–264. [Google Scholar] [CrossRef]
- Zhao, H.; Yan, Y.; Shi, X. A dynamic localization network for regional navigation under global navigation satellite system denial environments. Int. J. Distrib. Sens. Netw. 2019, 15, 15501477198. [Google Scholar] [CrossRef]
- Han, Y.; Wei, C.; Lu, T.; Wang, R. A Multi-platform Cooperative Localization Method Based on Dead Reckoning and Particle Filtering. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4037–4041. [Google Scholar] [CrossRef]
- Sun, K. A New GNSS Interference Detection Method Based on Rearranged Wavelet–Hough Transform. Sensors 2021, 21, 1714. [Google Scholar] [CrossRef] [PubMed]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise positioning of UAVs-dealing with challenging Rtk-GPS measurement conditions during automated UAV flights. In Proceedings of the International Conference on Unmanned Aerial Vehicles in Geomatics, Bonn, Germany, 4–7 September 2017; pp. 95–102. [Google Scholar]
- Liu, J.; Zhang, J.; Tan, L. A new data fusion method for multi-missile cooperative localization. In Proceedings of the IEEE 2012 Prognostics and System Health Management Conference (PHM-2012 Beijing), Beijing, China, 23–25 May 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, W.; Wu, S.; Wu, X. Relative navigation of missile formation and INS error correction methods. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 1545–1551. [Google Scholar] [CrossRef]
- Causa, F.; Vetrella, A.R.; Fasano, G.; Accardo, D. Multi-UAV formation geometries for cooperative navigation in GNSS-challenging environments. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 775–785. [Google Scholar] [CrossRef]
- Wang, X.; Quan, Z.; Zhang, J.; Liu, H. Distributed collaborative navigation based on rank-defect free network. Adv. Space Res. 2022, 70, 2424–2442. [Google Scholar] [CrossRef]
- Wang, R.; Chen, X.; Xiong, Z.; Zhang, H.; Liu, J. A Collaborative Navigation Method based on Partnership Optimization for Clustered Aircraft. IET Radar Sonar Navig. 2022, 16, 1042–1052. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case ① | Case ② | Case ③ | Case ④ | |
|---|---|---|---|---|
| Collaboration mode | Ranging | Ranging | Ranging and angular | Ranging and angular |
| Anchor aircraft | Nonexistent | Existent | Nonexistent | Existent |
| Aircraft Configuration | Case ① | Case ② | Case ③ | Case ④ |
|---|---|---|---|---|
| Taper | 6 | 3 | 6 | 0 |
| Square | 7 | 5 | 7 | 3 |
| Line | 9 | 7 | 9 | 5 |
| Sensor Error Parameters | Value |
|---|---|
| Constant drift error of gyroscope | 0.3(°)/h |
| Gyro first-order Markov process time | 3600 s |
| Accelerometer bias error | 1 × 10−4 g |
| Accelerometer first-order Markov process time | 1800 s |
| Range sensor accuracy | 1 m |
| Angle measuring sensor accuracy | 0.1° |
| Number of label aircraft | 7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Zhang, H.; Gu, C.; Xiong, Z.; Liu, J. Collaborative Localization Method Based on Hybrid Network for Aerial Swarm. Aerospace 2024, 11, 304. https://doi.org/10.3390/aerospace11040304
Wang R, Zhang H, Gu C, Xiong Z, Liu J. Collaborative Localization Method Based on Hybrid Network for Aerial Swarm. Aerospace. 2024; 11(4):304. https://doi.org/10.3390/aerospace11040304
Chicago/Turabian StyleWang, Rong, Huiyuan Zhang, Chen Gu, Zhi Xiong, and Jianye Liu. 2024. "Collaborative Localization Method Based on Hybrid Network for Aerial Swarm" Aerospace 11, no. 4: 304. https://doi.org/10.3390/aerospace11040304
APA StyleWang, R., Zhang, H., Gu, C., Xiong, Z., & Liu, J. (2024). Collaborative Localization Method Based on Hybrid Network for Aerial Swarm. Aerospace, 11(4), 304. https://doi.org/10.3390/aerospace11040304