Abstract
The Moon is the closest celestial body to the Earth. Its rich unique resources are an important supplement to the Earth’s resources and have a profound impact on the sustainable development of human society. As large-scale exploration missions gradually progress, demands for communication, navigation, surveying and other services of lunar-space probes have significantly increased. Constellation navigation and orbit determination technology will become an indispensable part of future lunar exploration infrastructure. This article systematically analyzes the current status of lunar relay navigation satellite networks at home and abroad, summarizes the technical principles of single-satellite and constellation navigation and orbit determination, discusses the technical difficulties in lunar navigation constellation orbit determination and navigation, and analyzes possible solutions. Finally, the development trend of research on high-precision orbit determination and navigation methods for lunar navigation constellations is proposed.
1. Introduction
Since the 21st century, lunar exploration has once again become a research hotspot. Countries around the world have launched lunar probes more than one hundred times. Space powers such as the United States and Europe have successively planned several unmanned/manned lunar exploration missions, including the Artemis program [1,2] and the Moon Village project [3], etc., with a view to ultimately realizing long-term residence on the Moon as well as the development and utilization of resources. With the successful implementation of China’s Chang’e-5 mission [4], the three-step plan of ‘orbiting, landing and returning’ of the lunar exploration project was successfully completed. The lunar south pole exploration, lunar far side sampling return, and the construction of the international lunar research station have become the next direction for China’s lunar exploration.
With the gradual launches of large-scale lunar exploration missions, the demand for high-precision navigation and positioning of lunar probes has become increasingly urgent. At present, the main methods of precise orbit determination for Earth–lunar space probes are via ground-based measurements, including radio ranging, velocity measurement, and interferometry. As the quantity of in-orbit lunar probes increases, ground measurement and control are facing daily increasing pressure, and are barely meeting the needs of long-term orbit determination for a large number of lunar probes. At the same time, for long-distance lunar probes, ground measurement and control have characteristics such as long time delays, weak signals, and the influence of unfavorable factors such as the problem that the far side of the Moon cannot communicate directly with the Earth due to blocking. It is difficult to achieve continuous, real-time and accurate navigation and positioning solely by relying on ground systems. Referring to the orbit determination capabilities of China’s current lunar exploration projects, the orbit prediction accuracy of lunar probes is generally in the order of several hundred meters, which cannot meet the orbit determination accuracy requirements of future lunar navigation constellations.
Meanwhile, in addition to the above-mentioned methods, the current lunar probe orbit determination methods also include satellite-ground laser measurement, GNSS signal measurement, astronomical navigation, etc. Among them, satellite-to-ground laser ranging has a high accuracy, but also has high requirements on the Earth’s atmospheric environment and limited usage time.
GNSS can achieve real-time positioning. In [5], the estimated orbit is validated with SLR as the satellite is equipped with a laser retroreflector array (LRA). A 3D RMS of about 0.3 m accuracy levels is obtained for POD using SLR. Using a real-time onboard navigation filter, 1.1 m accuracy in 3D RMS was achieved while post-processing on the ground with flight data offered 0.7 m accuracy in 3D RMS. In [6], a POD solution based on the Schmidt–Kalman filter performed better in terms of accuracy than the standard Kalman filter using single-frequency GPS receiver data. POD accuracy is improved by about 6 cm compared to the standard Kalman filter. In [7], a consider Kalman filter (CKF)-based reduced-dynamic orbit determination (RDOD), or CKF-RDOD, approach was used. The results showed a satisfactory POD with approximately 1.5 m level of three-dimensional RMS error with the CKF-RDOD approach using GPS data and broadcast messages in real-time scenarios. For satellites on LEO orbits, Montenbruck et al. used a combined GPS/Galileo receiver to achieve precise orbit determination [8]. Ref. [9] used the Kalman filter algorithm for real-time POD, providing seven different solutions using the onboard and simulated data. At those distances, decimeter-level onboard orbit determination can be achieved. For deep space applications, GNSS faces challenges such as weak side-lobe signals, poor visibility and limited positioning accuracy. Combined with low-orbit constellations, joint high-, medium- and low-orbit fast and high-precision positioning has become the development direction of the next generation of intelligent location services.
Astronomical navigation includes methods such as angle measurement, velocity measurement, and ranging. Combined with orbital dynamics, real-time satellite positioning can be achieved. However, it also faces the problem of limited accuracy and low maturity of high-precision navigation instruments. Therefore, the existing single-satellite orbit determination method for lunar probes cannot meet the needs of future large-scale lunar resource development.
Future lunar exploration will be more complex and diversified, and using lunar constellation for exploration can effectively solve these problems. The lunar relay communication and navigation positioning systems will become a necessary part of the future lunar exploration infrastructure. Correspondingly, the lunar navigation and communication system architecture LunaNet [10], Project Moonlight [11,12], the Lunar Pathfinder Mission [13], the new hybrid data relay satellite CommStar-1 [14] and other plans for supporting lunar probe relay communications were proposed. China has also proposed its own ‘Queqiao comprehensive constellation for communications, navigation and remote sensing’ [15], which is planned to be completed in three phases to provide relay communications, navigation, positioning and timing services for cislunar space transfer and lunar surface exploration activities.
The lunar exploration constellation composed of Moon orbiters and relay satellites on the Earth–Moon balance point can achieve continuous coverage of specific areas of the lunar surface or even the entire lunar surface, and can provide necessary relay communication, navigation, positioning and other services for human beings to fully carry out lunar exploration in the future. Among them, the lunar orbit can achieve full lunar coverage and communicate with lunar targets at close range. Its orbital characteristics are similar to those of Earth satellites, so it is easy to apply. Compared to lunar orbit, the observation coverage on the libration point orbit is wider. Additionally, the L2 point of the Earth–Moon system keeps its position over the back of the Moon, so one satellite on libration points can provide a relentless lunar coverage equivalent to a lunar orbit constellation. The disadvantage is that the libration point is farther from the lunar surface compared to the circumlunar orbit, resulting in insufficient communication timeliness and navigation accuracy.
The lunar space probe’s demand for communications, navigation, surveying and other services has increased significantly. The construction of the communication and navigation remote sensing constellation will significantly improve the efficiency of lunar resource surveying, development and utilization while meeting the technical requirements of future exploration missions. In response to the demand for high-precision lunar navigation and orbit determination, this article first analyzes the principles of related technologies, research status, and key difficulties that need to be solved urgently. Finally, the future development trends are outlined, providing reference directions for the construction of future lunar navigation constellations.
2. Current Status of Lunar Relay Navigation Satellite Networks
In the 21st century, the strategic significance of lunar exploration activities has become increasingly prominent. Lunar resources include location resources, environmental resources, material resources, etc., which have huge development and utilization value. The world’s major aerospace countries and organizations have successively planned several unmanned/manned lunar exploration missions, with the aim of ultimately realizing long-term residence on the Moon and the utilization of resources. China has continued to carry out scientific research and engineering practice in the field of lunar exploration. It has been undertaking a ‘lunar exploration project’ since 2004. The three-phase mission of ‘orbiting, landing and returning’ has been a complete success, and the subsequent four-phase lunar exploration mission is in full progress.
The south pole of the Moon has the largest and deepest impact basin in the solar system—the Aitken basin. There is also water ice at the north and south poles of the Moon. The poles and back of the Moon may contain rich resources and have greater exploration value. Exploration is the cornerstone of human exploration and research of the entire solar system. In previous lunar exploration missions as well as landing and sampling return missions on the front side of the Moon, the probe’s measurement and control communication during each flight phase could rely on ground stations’ support, so a dedicated communication and navigation satellite system was not developed. However, as lunar exploration activities progress towards the direction of long-term habitation and development, and the exploration values of the lunar poles, backside and other areas becomes more prominent, the issue of communication and navigation services for the cislunar space has garnered significant attention.
In previous lunar exploration missions, the number of probes in a single mission was limited, and measurements and control communications at each flight phase could be supported by ground stations. Therefore, there was no urgent need to develop a dedicated communication and navigation satellite system. As the value of lunar exploration becomes more prominent, the quantity of probes operating in the Earth–lunar space will increase rapidly, and the orbit determination of multiple probes will place a greater load on ground stations. It is also difficult to directly provide navigation support for the lunar south pole or lunar far-side probes due to the propagation characteristics of radio, the influence of lunar tidal locking and the impact of ground stations. On the other hand, future lunar resource development and other tasks will require more real-time high-precision positioning and speed control in the Earth–lunar space. Current orbit determination methods of lunar probes include satellite-to-ground laser measurement, GNSS signal measurement, astronomical navigation, etc. Among them, satellite-to-ground laser ranging is highly accurate, but also imposes high requirements on the Earth’s atmospheric environment and limited usage time. GNSS can achieve real-time positioning, but has weak side-lobe signals, poor visibility, and limited positioning accuracy in deep space exploration [16]. Astronomical navigation includes angle measurement, velocity measurement, and ranging. Combined with orbital dynamics, real-time positioning of satellites can be achieved. However, it also faces the problem of limited accuracy and low maturity of high-precision navigation instruments. Therefore, the existing single-satellite orbit determination method for lunar probes cannot meet the needs of future large-scale lunar resource development.
Future lunar exploration will be more complex and diversified. Using lunar constellations for exploration can effectively solve these problems and achieve continuous coverage of specific areas of the lunar surface or even the entire lunar surface, which can provide communication, navigation, positioning and other functional support for human beings to comprehensively carry out lunar exploration in the future. Therefore, the construction of lunar communication and navigation satellite systems has gradually become one of the most important planning contents of future lunar exploration by major space agencies. Foreign countries have proposed the LunaNet, Moonlight, Lunar Pathfinder and other special communication and navigation systems for lunar exploration. In 2022, China also launched the demonstration of a lunar communication and navigation system (constellation).
2.1. U.S. Lunar Navigation and Communication Plan
- LunaNet
As the National Aeronautics and Space Administration (NASA) continues to explore the Moon and the solar system, the demand for powerful interstellar communication and navigation systems is also increasing [17]. To meet this growing demand, NASA is developing LunaNet, a flexible and expendable lunar navigation and communication system architecture that can provide network, positioning, navigation and timing (PNT) as well as scientific services to lunar exploration users [10]. With the LunaNet system, lunar probes or astronauts can access networks just like people on Earth. Each communication link can be connected to a larger network, allowing data transmission between any devices on the network.
The system architecture will offer users three services: network services, positioning, navigation and timing services, and scientific utilization services. After utilizing LunaNet, users will encounter an operational environment similar to Earth users. To provide the required navigation capabilities to lunar missions, LunaNet will provide the following data:
- (1)
- Universal stable time and frequency reference source for achieving time synchronization between all elements of the entire network;
- (2)
- Key measurement information obtained from each observable communication link, such as radiance or optimization;
- (3)
- Observability of GNSS signals;
- (4)
- Angle measurement of stars and celestial bodies for determining relative positions;
- (5)
- Images of surface features nearby for relative terrain navigation;
- (6)
- Broadcasting signals that transmit navigation data throughout the lunar environment, similar to GPS signals on Earth.
The LunaNet architecture is open, expandable, and interoperable. Lunar exploration missions can either be components or users of the LunaNet infrastructure, or even play both roles simultaneously. To satisfy future needs, NASA is exploring spacecraft designs including lunar relay satellites and small satellite constellations to expand the LunaNet infrastructure. These relay satellites or small satellites can carry payloads that provide PNT-related basic functions, such as ranging equipment, autonomous navigation processors, broadcast beacons and time reference source/distribution modules.
- 2.
- CommStar-1
On 9 January 2024, NASA once again postponed its manned lunar landing mission. The “Artemis 2” and “Artemis 3” missions will be postponed to September 2025 and September 2026 respectively, and one of the key technologies is high-speed communications between the Earth and the Moon. A new company called CommStar Space Communications has announced a plan to launch CommStar-1, a hybrid data relay satellite that can be used as private communications infrastructure for space missions.
The CommStar-1 relay infrastructure will be designed as a hybrid system for radio frequency and optical (laser) communications. CommStar-1 will be a larger communication platform than anything else currently considered for missions on the lunar surface or in orbits around the Moon, capable of receiving and relaying signals between satellites and the Earth from its access points in the cislunar service area. CommStar-1 will provide active and always-on advanced data services at a distance of more than 362,102 km (225,000 miles) from the Earth, while its general location will be closer to the Moon.
The goal is to establish a space-based Cislunar Network Access Point (C-NAP), operating in a stable and diverse orbit, as a hybrid space-based platform (Earth–Moon, Moon) and a hybrid data communications relay to Earth.
CommStar Space Communication hopes to use the new communications satellite as the primary communications infrastructure to serve the anticipated needs of government and commercial agencies from a low Earth orbit to the Moon and eventually beyond. CommStar-1 is designed to be the first satellite in a similar system. The specific design goals are as follows:
- (1)
- Receive/distribute radio frequency and optical (laser) communications from the Moon, Earth, and cislunar space;
- (2)
- Fully enable integration and interoperability with other space and terrestrial infrastructure—lunar, terrestrial, and cislunar space;
- (3)
- Cloud-based data distribution, open architecture, software definition, and end-to-end user management;
- (4)
- Realize communication between users and space;
- (5)
- User data are distributed directly to different cloud storage facilities (hosts), corporate sites, and universities/laboratories through existing interconnections between space stations and ground stations.
2.2. ESA Lunar Navigation and Communication Program
The European Space Agency (ESA)’s Project Moonlight is committed to building a shared lunar communication and navigation constellation. This concept proposes to deploy a satellite network around the Moon to expand the coverage of reliable satellite navigation to provide manned and unmanned lunar explorations. The constellation will eventually be used by official and commercial lunar exploration missions. Moonlight will be operated as a commercial service to reduce the development difficulty and cost of lunar exploration missions.
Over the next decade, ESA aims to establish a common communication and navigation infrastructure for all lunar missions based on dedicated lunar satellites. Project Moonlight will support missions that cannot use Earth satellite navigation signals, such as landers on the far side of the Moon, and plans to achieve target positioning accuracy below 50 m.
Project Moonlight will build a Lunar Satellite Communication and Navigation System (LCNS) via global cooperation, based on lunar landers from various countries. It consists of near-lunar orbit satellites and lunar surface static ranging beacon stations. It deploys a constellation around the Moon to provide support to manned and unmanned lunar exploration activities.
Currently, ESA has a signed contract with Surrey Satellite Technology Limited (Guildford, UK), which will be responsible for developing the Lunar Pathfinder, the first commercial satellite for Project Moonlight. It is planned to be launched in 2026 and weighs approximately 208 kg. The satellite will carry out an eight-year mission to provide commercial relay services for lunar missions. It will also expand the operational limits of satellite navigation signals, aiming to verify that a commercial communication constellation can be built in the future.
The Lunar Pathfinder will carry out the first satellite navigation and positioning mission in the lunar orbit by equipping an advanced satellite navigation receiver. It plans to use a highly stable frozen large elliptical orbit above the Moon’s south pole to focus on the south pole as the main exploration target. Several unmanned lunar landing missions and NASA’s Artemis program all plan to go to the lunar south pole in the future. The Lunar Pathfinder will communicate with probes on the lunar surface and in orbit around the Moon via UHF and S-band, and relay communication signals to the Earth via X-band. The signal is detected by a high-sensitivity receiver, and positioning accuracy of approximately 100 m will be achieved by using advanced space-borne orbit filters.
2.3. China’s Lunar Navigation and Communication Plan
The general goal of China’s Queqiao comprehensive constellation construction is to build a communication and navigation system that serves the lunar surface, lunar orbit, cislunar space and even deep space by 2045, and expand to the lunar Internet to support unmanned/manned lunar, and even deep space, exploration as cislunar space infrastructure. At the same time, it will support the construction of the Earth–Moon space economic zone, laying a technical foundation for the further construction of the interplanetary Internet and the realization of space power in the future.
The construction of the entire lunar communication and navigation system has been divided into three phases [18]:
- (1)
- Phase I of the project (around 2030): Build a pilot constellation to support the fourth phase of the lunar exploration project, the international lunar scientific research station and other tasks.
- (2)
- Phase II of the project (before 2040): Complete the basic constellation to realize regional navigation. It will serve manned lunar exploration, international lunar exploration, as well as the exploration of Mars and Venus.
- (3)
- Phase III of the project (before 2050): Build an expanded constellation to achieve communication and navigation coverage on Mars and Venus, and serve the exploration of Mars, Venus, giant planets and the edge of the solar system.
Table 1 contains information on the current status of relay navigation satellite constellations, and introduces the leading institutions, project goals, navigation communication criteria and orbits of different constellations. The result shows that by deploying relay satellites in the cislunar space or lunar orbit, continuous coverage of navigation and communications for specific areas of the lunar surface or even the entire lunar surface can be effectively achieved, and the corresponding criteria can be achieved as well. In the future, the relay satellite network will be further applied in lunar exploration missions.

Table 1.
Analysis of the current status of relay navigation satellite.
2.4. Other Countries
Japan was the first to successfully utilize lunar relay satellites in lunar exploration missions. In September 2007, Japan successfully launched the SELENE satellite, which consists of a main satellite and two sub-satellites. The primary mission of the main satellite and one sub-satellite is to measure the gravitational field of the Moon, while the other sub-satellite was responsible for relay communication with the Earth. The orbit of SELENE is a polar orbit with an orbital inclination of about 90°. The main satellite was in a circular orbit with an orbital altitude of 100 km. The relay satellite is in an elliptical orbit with a perigee altitude of 100 km and an apogee altitude of 2400 km. The mission saw the breakthrough of many new technologies and achieved a series of results. At the end, it successfully impacted the Moon in June 2009.
In 2014, OHB SE in Germany and the University of Stuttgart proposed a lunar relay communication satellite program operating at the Earth–Moon L4 and L5 libration points. The purpose is to provide support for unmanned and manned lunar probes, with an operating life of 10 years. In order to solve the problem of large-capacity data transmission, besides microwave relay links, laser communication links are also used.
3. Overview of Single-Satellite Navigation and Orbit Determination Methods
3.1. Radio Measurement Orbit Determination Technology
At present, ground-based measurement and orbit determination technology is the main precise orbit determination method for Earth–lunar space probes, including ground-based radio ranging, velocity measurement and interferometry.
- Radio velocity measurement
According to the location of the oscillation source, Doppler velocity measurement is divided into one-way Doppler velocity measurement and two-way Doppler velocity measurement.
In unidirectional Doppler velocimetry, the oscillation source is mounted on the spacecraft. The downlink transmission signal is generated by the oscillation source on the spacecraft, and is received by the ground receiver after propagation and delay in space. The ground station calculated the spacecraft’s radial velocity by measuring the frequency difference of the received signal relative to the nominal downlink transmitted signal. Therefore, the single velocity measurement equipment is simple and does not require uplink signals, so it is widely used in satellite navigation and positioning.
The oscillation sources of the two-way Doppler velocity measurement are configured at the ground measurement and control station. The system consists of a ground transmitter, a ground receiver, a transmitting antenna, a receiving antenna and a transponder on the spacecraft. It is also called interrogational velocity measurement. The ground control station transmits a highly stable frequency signal to the spacecraft, which is forwarded or reflected back to the ground observation point through the spacecraft’s transponder. Comparing the return signal with the reference signal can determine the Doppler frequency shift (a change of two times) in the round trip of the signal, thereby obtaining the relative radial velocity of the spacecraft. Since a ground-based frequency standard is used as the reference signal for uplink and downlink signals for two-way Doppler velocity measurement, and the stability of the frequency source used by the ground station can reach an extremely high level, it can obtain much higher accuracy than one-way velocity measurement.
Doppler velocity measurement adopts an integral model. The relationship between the velocity measurement observation value and the receiving frequency is as follows [19]:
In the formula, represents the radial velocity of the probe. is the receiving frequency and the measurement quantity. is the transmission frequency, which is generally known. is the speed of light. The parameter is the spacecraft transponder turnaround ratio, which is the ratio of the transmitted down-leg frequency at the spacecraft to the received up-leg frequency at the spacecraft. Note that these two frequencies are phase-coherent. The turnaround ratio is a function of the uplink band at the transmitting station on Earth and the downlink band for the data point. Both of these bands are obtained from the data record for the data point on the OD file.
The transmitter frequency at a tracking station on Earth can be constant or ramped. If it is a constant frequency, it is obtained from the record of the OD file for the data point. If the transmitter frequency is ramped, it is specified as a series of contiguous ramps. Each ramp has a start time, an end time, the frequency at the start time and the constant derivative of (the ramp rate) which applies between the start time and the end time for the ramp. When the spacecraft is the transmitter, the frequency of the transmitted signal (for all one-way data types except GPS/TOPEX observables) is:
where is the S-band value of the spacecraft transmitter frequency and converts it to the transmitted frequency for the downlink band for the data point (obtained from the data record for the data point on the OD file).
- 2.
- Radio ranging
In ranging, continuous wave ranging signals can be divided into harmonic signals (such as sidetone signals) and non-harmonic signals (such as pseudo-code signals). Sidetone ranging uses ‘sidetone’ (a single-frequency sine wave) to modulate the sidetone with a fixed frequency as a baseband signal onto a carrier wave and transmits it to the target. The target forwards the signal to the receiving end to demodulate. After processing, by comparing the phase difference between the received signal and the transmitted signal, the total distance between the transmitting point, the target, and the receiving point can be obtained. Increasing the sidetone frequency can achieve high-precision ranging, and this method has a narrow bandwidth and high acquisition speed.
The basic principle of pseudo-code ranging is the same as that of sidetone ranging. The distance is calculated based on the relationship between the propagation delay of the ranging signal and the speed of light. The difference is that sidetone ranging uses phase difference to calculate distance, while pseudo-code ranging uses autocorrelation functions to measure delay. Pseudo-code ranging uses the long pseudo-code period as the de-ambiguation signal and uses random chips as high-frequency sidetones. Ranging can be completed with only one signal.
Code-tone hybrid ranging is a hybrid system using pseudo-code and side-tone, which combines their respective advantages. It uses high-frequency sidetones to improve measurement accuracy and pseudo-code to decode distance blur.
The computed values of three-way ramped Sequential Ranging Assembly (SRA) and Planetary Ranging Assembly (PRA) range observables are calculated as follows [19]:
The reception time in station time ST at the receiving electronics at the receiving station on Earth is equal to the data time tag . The corresponding transmission time in station time ST at the transmitting electronics at the transmitting station on Earth is calculated as follows:
is the precision round-trip light time. The quantities and are zero-phase times at the receiving and transmitting stations, respectively. At , the phase of the transmitter ranging code at the receiving station is zero. The phase of the transmitted ranging code at the transmitting station is zero at . and are conversion factors at the receiving station and transmitting station, respectively, depending upon the uplink band and exciter type at the station.
The first integral in Equation (3) is the phase of the transmitter ranging code at the reception time at the receiving electronics at the receiving station on Earth. The second integral in Equation (3) is the phase of the transmitted ranging code at the transmission time at the transmitting electronics at the transmitting station on Earth. It is equal to the phase of the received ranging code at . The phases of the transmitter ranging code and the received ranging code at the reception time at the receiving electronics at the receiving station on Earth are measured in range units. The difference of these two phases is calculated modulo M range units, where M is the length of the ranging code in range units.
- 3.
- Very long baseline interferometry (VLBI)
VLBI technology is an important interferometry technology. It combines multiple radio telescopes hundreds or even thousands of kilometers away into a huge comprehensive aperture telescope. It is currently the highest-resolution astronomical observation technology and is widely used in the astrophysics, astrometry, geodesy and deep space exploration fields.
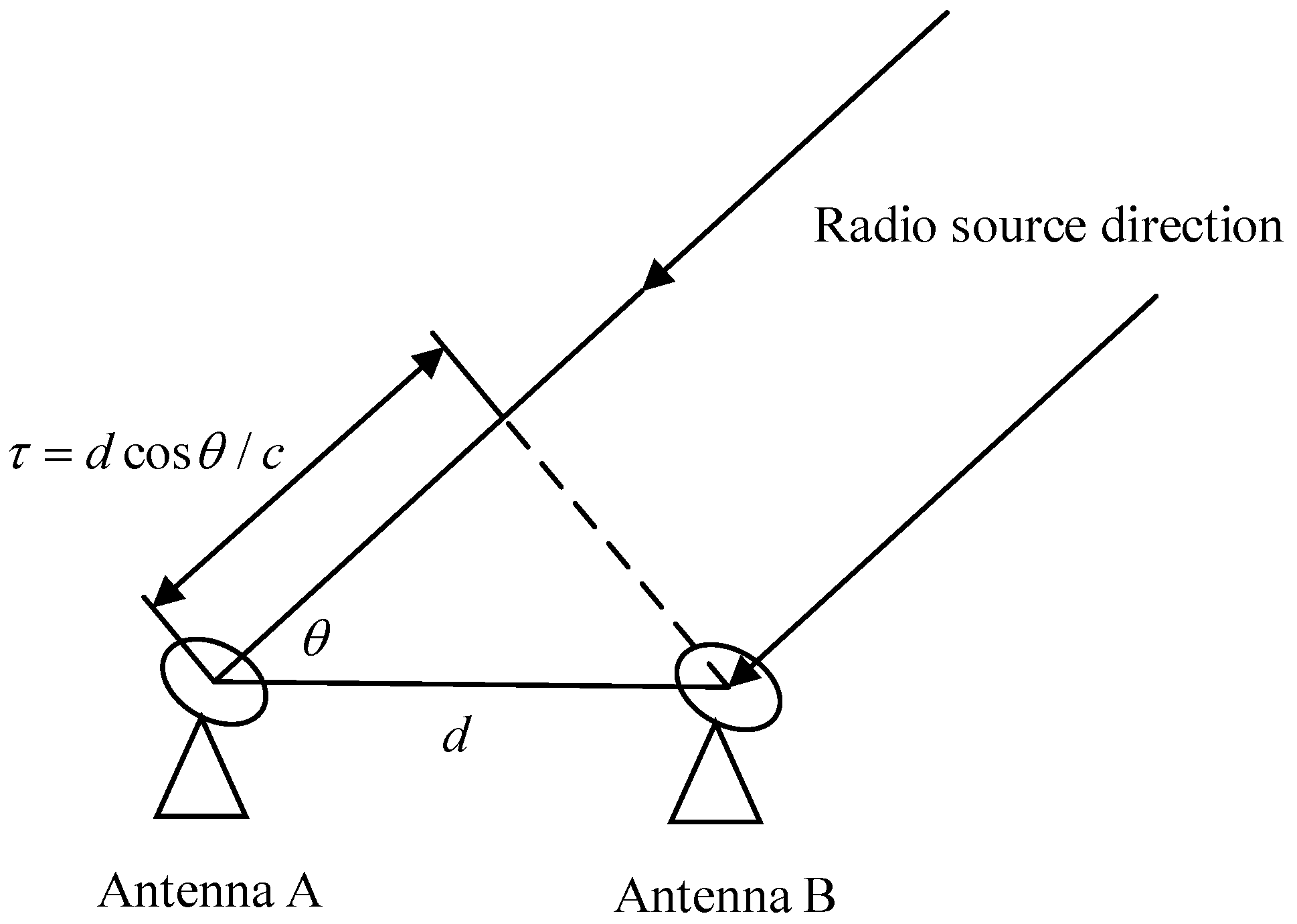
The measurement principle of the VLBI system of two base stations is shown in Figure 1. The distance between the radio source and the Earth is much longer than the distance between the two observation stations on the ground. Therefore, the radio signal emitted from the radio source can be considered parallel light when it reaches the Earth. The signal radiated by the same radio source at a certain time satisfies the interference conditions. In VLBI data processing, according to the radio signals received by each base station, the relative amplitude of the interference fringes, the time delay for radio signals radiated by the same radio source to reach each base station, and the change rate of the delay can be obtained. The correlation amplitude represents the intensity distribution information of the radio source, and the position information between base stations and the position information of the radio source can be calculated using the delay and delay rate.
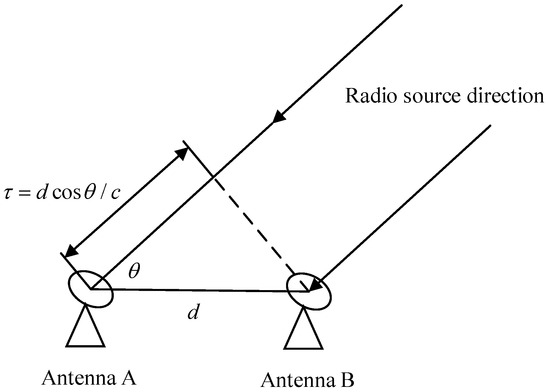
Figure 1.
Schematic diagram of radio interferometry.
According to the geometric relationship shown in the figure, the time difference between two measuring stations receiving a certain wave front (for one of the measuring stations, it is the delay value) is [20]:
The distance between the two base stations is , which can be called the baseline. is the speed of light. By performing multiple measurements of or for multiple sources, the three components of the baseline and the location of the source can be solved.
3.2. Astronomical Navigation Technology
The exploration mission faces problems such as extended information transmission time, complex environment, and many unknown factors in space, which has higher demands on the autonomous navigation of the probe. Radio navigation methods based on ground station measurement and control are widely used in space exploration-related missions. However, due to problems such as transmission rate, transmission delay, and cumulative errors caused by orbital dynamics recursion, it is difficult to achieve real-time high-precision navigation with single ground-based deep space radio navigation. Therefore, with the development of exploration missions, navigation methods that combine more astronomical information such as images and spectra have become a research hotspot.
According to the differences in measurement methods, astronomical autonomous navigation methods are divided into three categories: angle measurement navigation, ranging navigation and velocity measurement navigation.
- Astronomical angle measurement navigation
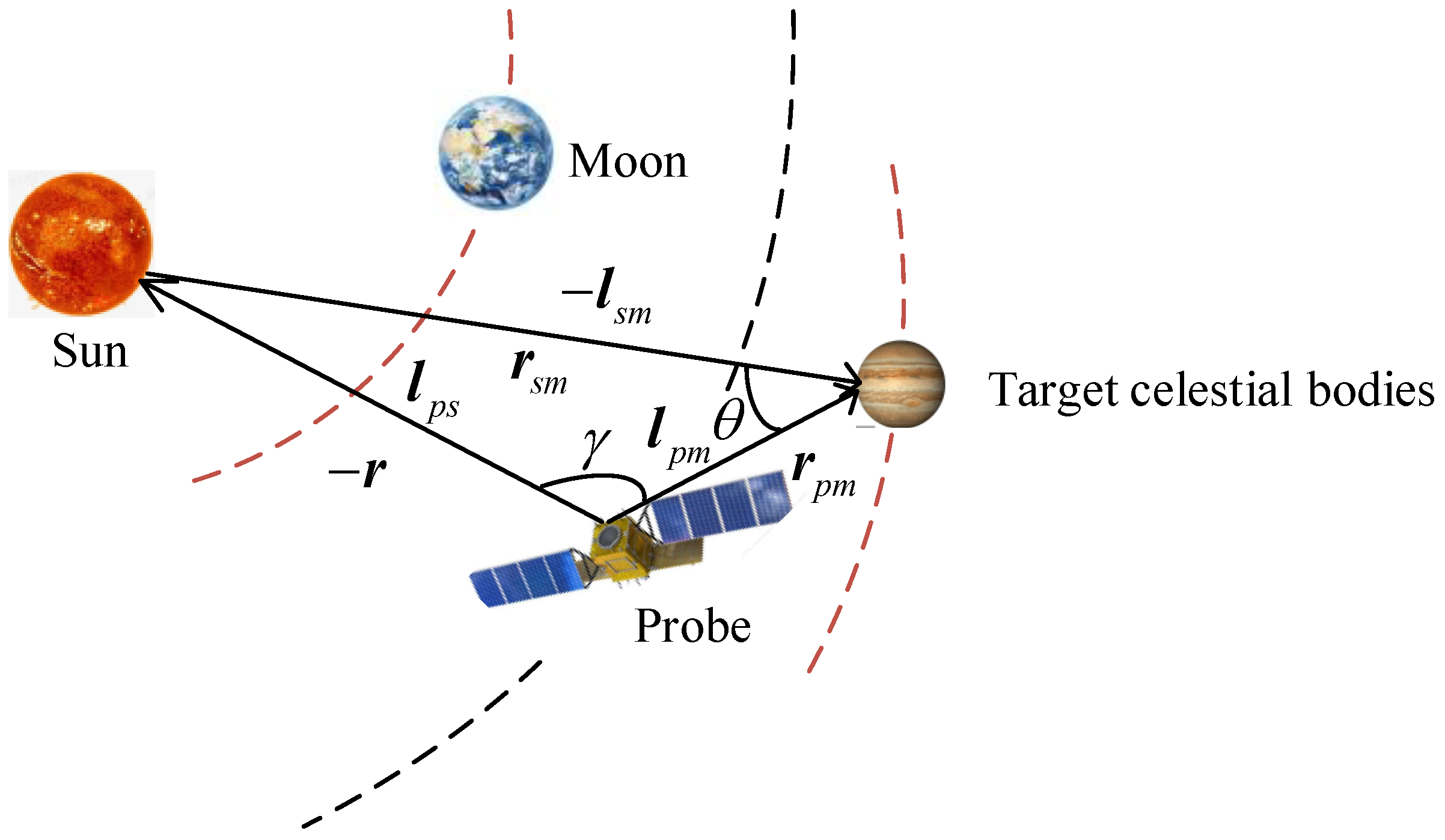
Astronomical angle measurement navigation uses optical images of target celestial bodies captured by navigation cameras and known celestial ephemeris, calculates the direction information of the probe relative to the navigation source using image-processing techniques, and finally combines navigation filter methods to achieve autonomous navigation, obtaining information such as the position, velocity and attitude of the probe in a certain coordinate system [21,22]. The astronomical angle measurement navigation method is widely used in deep space exploration missions, and its schematic diagram is shown in Figure 2. The height difference principle proposed by the French navigator Saint-Hillarie is the basis of astronomical angle measurement navigation. The earliest astronomical navigation method was designed based on this principle [23]. In the early stage of development, astronomical angle measurement navigation methods were mainly used as an auxiliary to terrestrial radio navigation methods. Subsequently, this technology has been continuously developed and improved, and has been successfully applied in several exploration missions [24,25,26,27,28]. Since the accuracy of astronomical angle measurement navigation is greatly affected by distance, when the probe is far away from the navigation target, a small error in the angle estimate may lead to a large error in the probe position estimation after calculation. In actual exploration missions, this technology is generally used in the approach or capture phase when the probe is closer to the target celestial body.
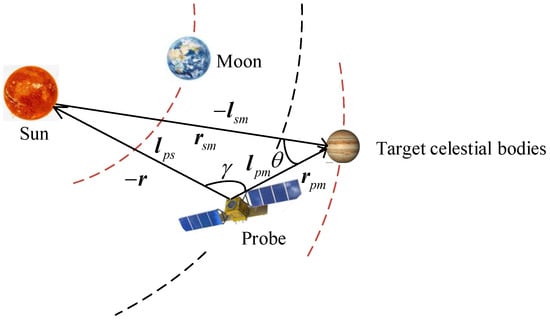
Figure 2.
Schematic diagram of angle measurement navigation.
In the heliocentric inertial coordinate system, the geometric relationship is [29]:
Among them, is the sight vector of the sun relative to the probe, and is the sight vector of the target celestial body relative to the probe, which can be obtained through the measurement of the navigation sensor. is the direction vector from the sun to the target celestial body, which can be obtained by means of ephemeris calculation. The position of the probe in the inertial frame is:
That is:
Among them, and can be obtained through navigation sensors and solar sensors, and their observation models are:
Among them, and are the sight vector observation noises. Taking the observed value as , the observation equation is:
For the above equation, Taylor expansion at and gives:
Ignoring the higher-order small quantities in the observed quantities, then:
Among them, the observation error is calculated as follows:
Among them, are measurement noises, which are generally treated as Gaussian white noise.
- 2.
- Astronomical ranging navigation
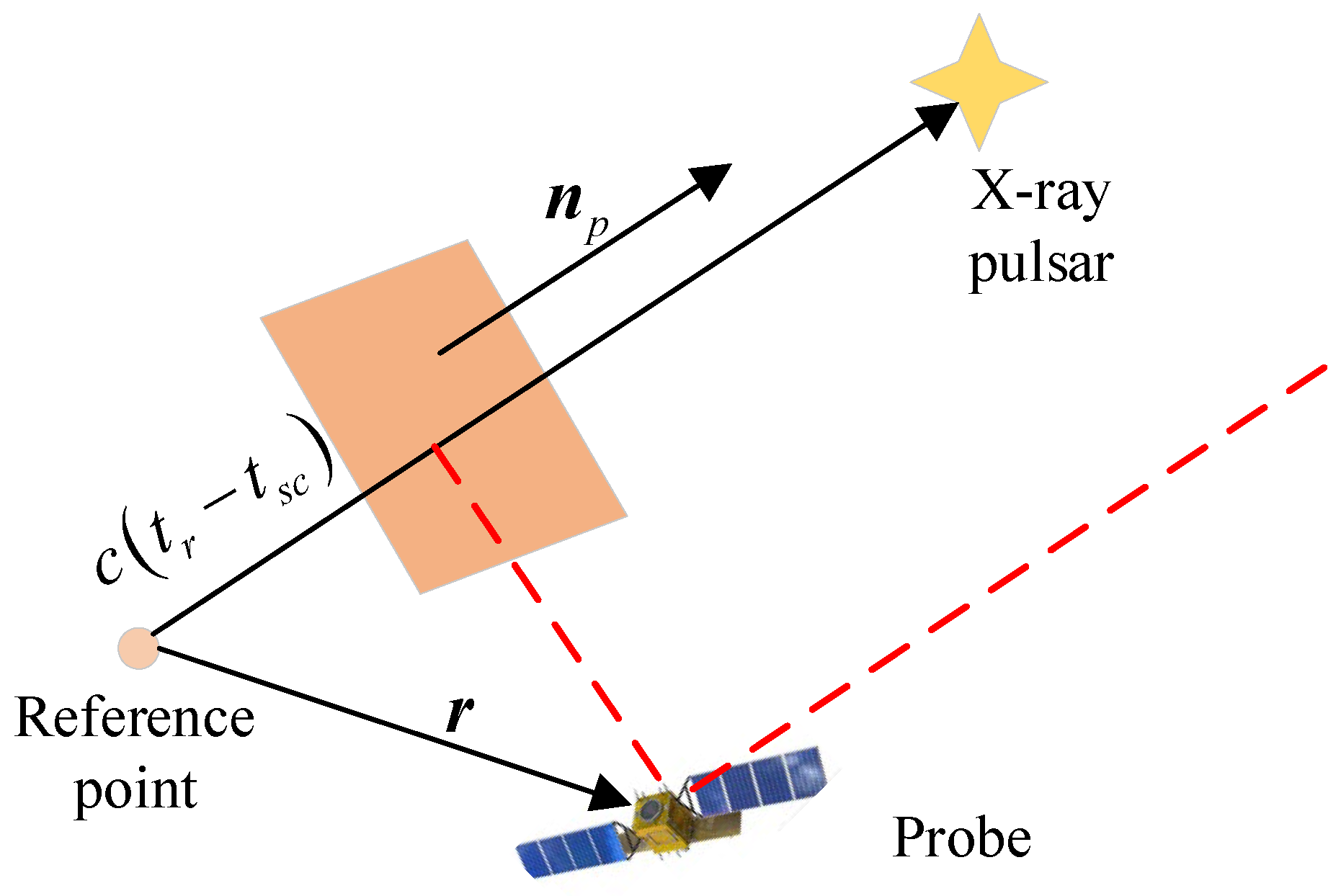
Astronomical ranging navigation is an autonomous spacecraft navigation method based on X-ray pulsar observations. X-ray pulsars will emit strong and stable periodic X-ray radiation. The difference between the time when the same pulse signal reaches the spacecraft X-ray detector and the time when it reaches the center of mass of the solar system predicted by the phase time model is used as the observation quantity to construct X-Ray pulsar navigation measurement equations. Combined with the speed of light, the plane where the spacecraft is located is obtained, which is the projected length of the distance from the spacecraft to the center of mass of the solar system in the direction of the pulsar, as shown in Figure 3. By detecting three pulsars at the same time, a geometric relationship can be constructed to calculate the space position of the spacecraft and achieve autonomous navigation. The radio pulse signal navigation proposed by Downs is the basis of astronomical ranging navigation [30]. The earliest autonomous navigation method of X-ray pulsars was designed based on this principle [31]. In the early stage of development, astronomical ranging navigation remained at the theoretical level. It was not until 2017 that NASA announced the implementation of the first space demonstration of X-ray pulsar navigation [32]. A series of subsequent tests also proved that this technology has the advantages of a stable navigation source signal, strong anti-interference and long application distance [33,34,35,36]. The key to follow-up research is the establishment of a pulsar library and effective on-orbit exploration technology of pulse signals.
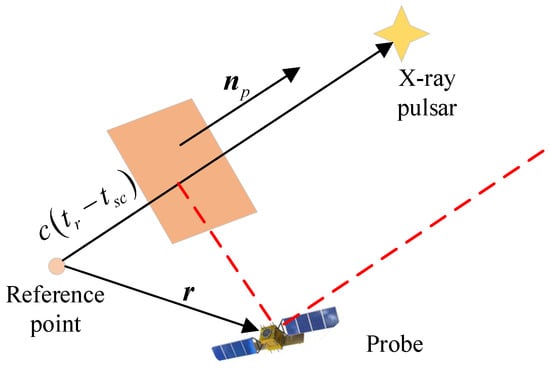
Figure 3.
Schematic diagram of ranging navigation.
- 3.
- Astronomical velocity navigation
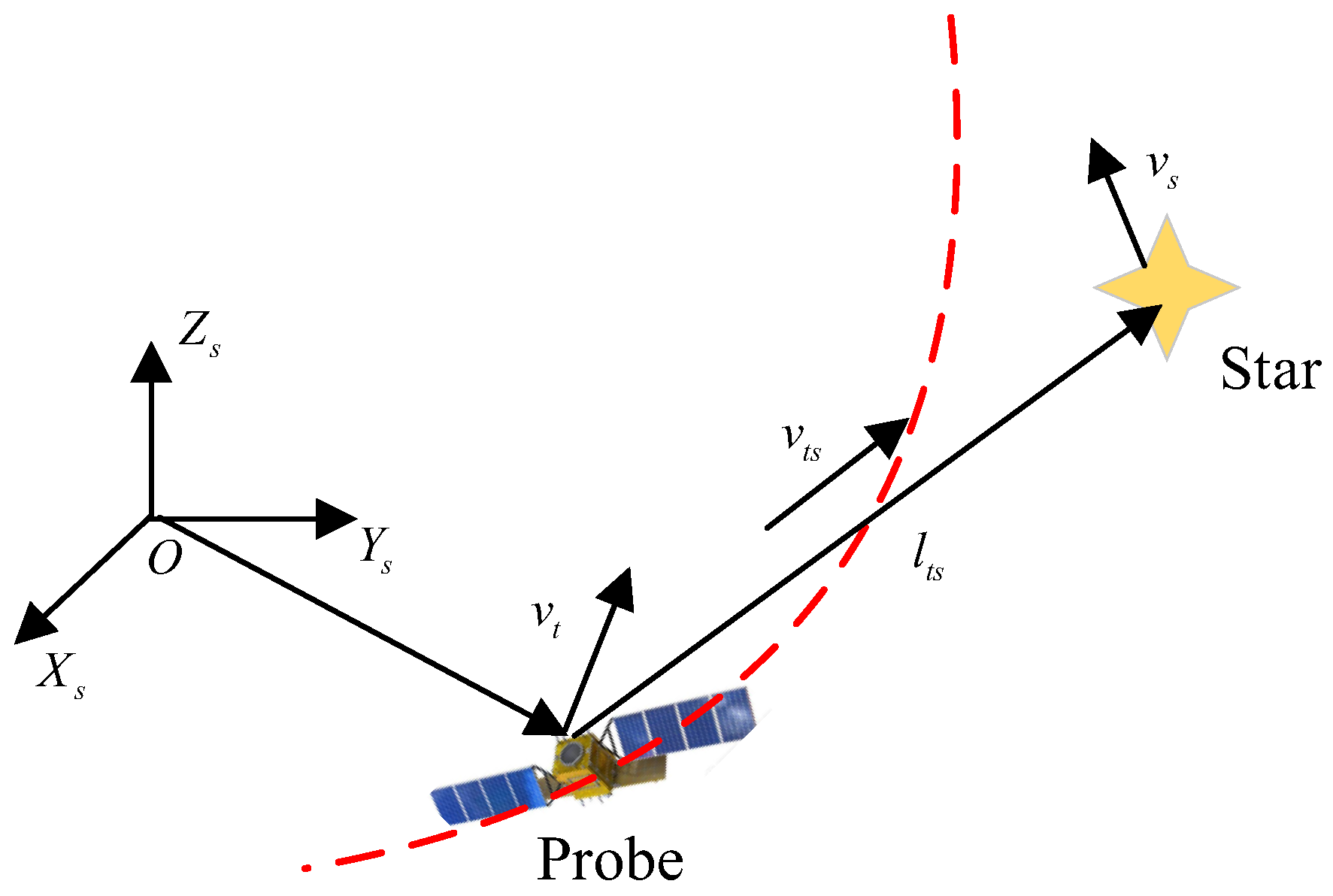
Astronomical velocity measurement navigation uses the solar system and extrasolar stars as navigation sources. It obtains relative motion speed information by observing the astronomical spectral frequency shift caused by the motion of the probe relative to the navigation source, and further calculates the velocity vector of the probe in space [37]. The schematic diagram is shown in Figure 4, whereby are the velocity vectors of the star and the probe in the reference coordinate system. is the azimuth vector of the star relative to the probe. is the radial velocity of the probe relative to the star. can be derived from the spectral frequency shift amount and is the reference spectral frequency. The basis of astronomical velocity measurement and navigation is the feasibility analysis of using the visible spectrum band and radio spectrum band of stars for velocity measurement proposed by Franklin [38]. Guo et al. further designed an astronomical speed measurement system based on the solar radial velocity and direction vector [39]. Subsequently, the program has been continuously developed and improved, and many scholars have completed a large amount of in-depth and detailed research work [40,41,42]. Velocity navigation initially obtains the speed information of the probe. In order to obtain the spatial position of the probe, the speed needs to be further integrated. When the integration time is long, there is a problem of accumulated error. Therefore, although this method is not limited by the probe distance, it is generally used for short-term autonomous navigation in actual exploration missions.
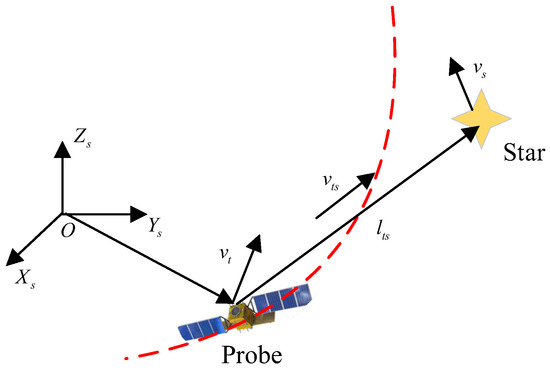
Figure 4.
Schematic diagram of velocity measurement navigation.
There are obvious differences in the navigation sources, sensors used, measured information, navigation principles and performance characteristics of different navigation methods, so there are also differences in applicability. In practice, information obtained by multiple navigation methods is often fused through filtering to form a combined navigation system to further improve navigation accuracy.
3.3. Satellite-to-Ground Laser Measurement Technology
Satellite Laser Ranging (SLR) is currently the most accurate technology for precise satellite orbit determination and inspection. Its single ranging accuracy reaches centimeter level or even sub-centimeter level. The United States and the Soviet Union successively installed five sets of laser reflector arrays on the lunar surface, and collected a large amount of observation data as well as noting significant scientific achievements.
SLR is used to accurately measure the round-trip time interval of the laser pulse from the ground observation point to the satellite equipped with a corner reflector, expressed in terms , to calculate the distance from the ground observation point to the satellite . and have the following relationship [43]:
where is the speed of light.
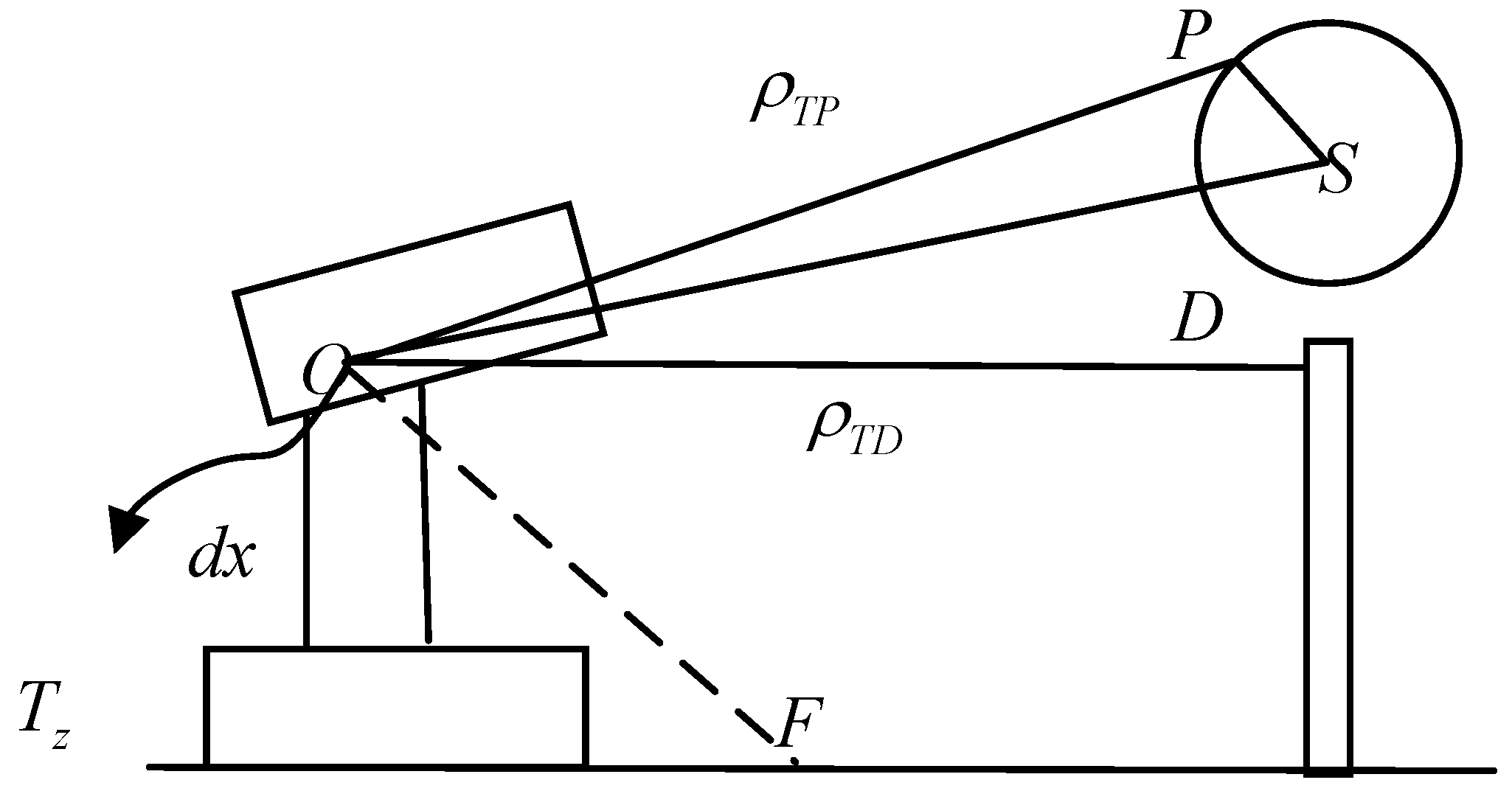
The schematic diagram is shown in Figure 5. is the satellite observation value vector and is the ground target calibration observation value vector. is the distance value for ground target calibration and should be accurately measured by a ranging instrument during the construction of the ground target. is the distance vector of the ground center point, which should also be accurately measured during the construction of the ground center point. is the satellite center of the mass correction value vector, determined according to the shape of the satellite. is the system delay correction value, which is obtained by each measurement of the ground target. Laser ranging observation is to measure the distance from the ground reference point to the satellite. The ground reference point can be the intersection of the two axes of the telescope as the reference point, or the ground center point as the reference point.
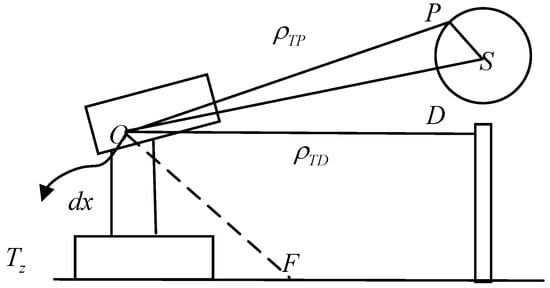
Figure 5.
Schematic diagram of laser ranging.
The observation vector from the telescope reference point to the satellite’s center of mass can be expressed as:
The observation vector from the ground center point to the satellite’s center of mass can be expressed as:
3.4. GNSS Orbit Determination Technology
GNSS (Global Navigation Satellite System) orbit determination refers to the method of positioning and orbit determination of a spacecraft using a satellite navigation system. By transmitting a set of precise radio signals, which are received and processed by ground receivers, precise positioning and orbit determination are achieved.
The basic principles of GNSS orbit determination are that a spacecraft or mobile device receives signals from at least four satellites and calculates its position by measuring the time difference of these signals. This is because each satellite emits a precise signal that contains information about the satellite’s own position and time. By receiving signals from multiple satellites, a GNSS receiver can calculate its distance from each satellite and use this distance information to determine its position.
Specifically, the GNSS orbit determination principle includes the following key steps:
- (1)
- Satellite signal transmission: GNSS satellites emit signals that contain information about the satellite’s own position and time. These signals travel through the air via radio waves and are picked up by ground-based receivers.
- (2)
- Signal receiving and processing: After the ground receiver receives the signal transmitted by the satellite, it will process the signal. This includes amplifying, filtering, demodulating and other operations on the signal to extract useful information.
- (3)
- Signal time difference measurement: By measuring the time difference between signals received from multiple satellites, the ground receiver can calculate its distance from each satellite. This is accomplished by comparing the difference in the time it takes for the signal to arrive at the receiver.
- (4)
- Positioning calculation: By measuring the distance between four or more known satellites and the GNSS receiver, the position of the receiver can be determined through distance intersection. Therefore, the positional information of the satellite which is equipped with the GNSS receiver can be obtained. There are many methods for calculating position, among which the triangulation method and the least squares method are the most commonly used.
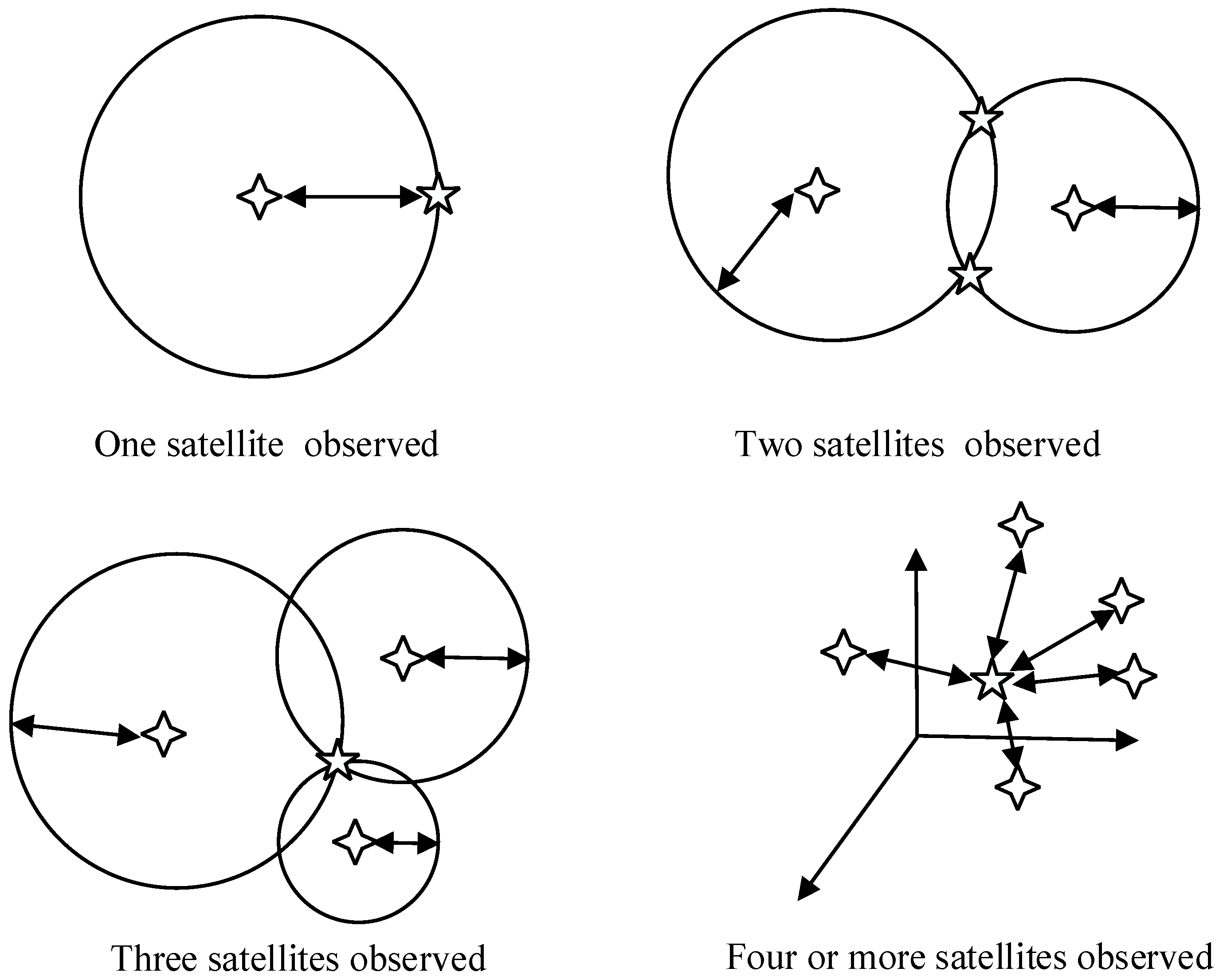
As shown in the Figure 6, when the receiver only observes one satellite, it can only determine that the receiver is on a sphere with the geometric distance between the two satellites as the radius. When it observes two satellites, the two spheres intersect to form a circle, and the receiver position is located on this circle. When three satellites are observed, the three spherical surfaces intersect in pairs and form two points in space. One of the positions can be eliminated according to the conditions, and the receiver’s position can be obtained. To actually determine the receiver’s position, at least four satellites need to be observed. This is because the receiver’s clock error is also an unknown parameter. Three types of observations can be obtained using GNSS receivers: pseudo range, carrier phase, and Doppler frequency shift. By analyzing the observations and processing the data, information on the status of the satellite can be obtained.
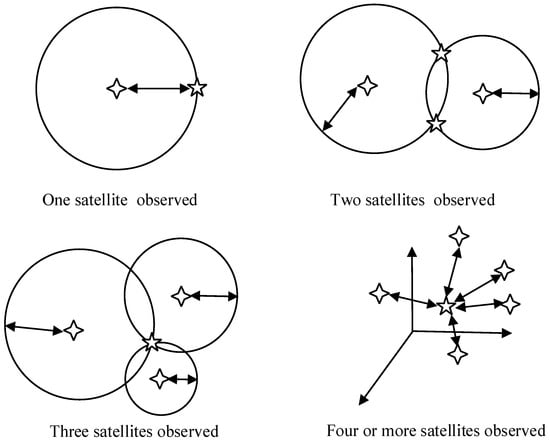
Figure 6.
Basic principles of spaceborne GNSS orbit determination.
3.5. Navigation Data Processing Technology
A navigation algorithm, which can use the navigation information containing noise to achieve the state estimation of the target, is one of the most important directions in research into navigation technology methods. The first estimation algorithm used for satellite navigation is the least squares algorithm (LS). Least squares estimation uses the minimum sum of squares of the residuals as the risk function and does not make any assumptions about the observation sample. Because of its wide applicability and ease of operation, it is widely used in navigation calculations.
The parameters of interest, as well as the dominant error sources, are often time-varying. If these time variations can be modeled, the parameters can be resolved based on minimum mean squared error prediction, filtering and smoothing techniques [44]. Of the various such techniques, the most commonly used filter methods in navigation research include the Kalman filter (KF) [45], extended Kalman filter [46], unscented Kalman filter [47] and improved algorithms based on these filter methods. The EKF algorithm is simple to calculate and easy to implement. However, due to errors introduced by the linearization process, the estimation accuracy of highly nonlinear problems is poor. Although the UKF algorithm avoids the linearization errors introduced in Taylor approximation, it is still based on the Gaussian assumption. Witternigg et al. provide a good example of filtering and processing in direct lunar transfers using UKF [48]. Whether it is KF, EKF or UKF, they all require relatively accurate a priori statistical information on the system model and measurement model noise, but any statistical information has a certain degree of distortion. When the prior noise statistics error is large, the accuracy of the navigation filter methods will decrease or even diverge. In order to reduce the influence of prior noise statistical information distortion on EKF and UKF, scholars have proposed the Sage–Husa filter [49,50], evanescent filter [51,52], robust adaptive filter [53,54,55], multi-model adaptive filter and other adaptive filter methods. The Sage–Husa [56] adaptive filter method calculates the observation residual or prediction residual by selecting the observations within an observation epoch interval, and then re-estimates the system noise covariance matrix Q and the measurement noise covariance matrix R. This method adaptively estimates system and measurement noise based on real-time measurement conditions, thereby improving the accuracy and reliability of sensor measurement data. Fagin proposed an evanescent filter algorithm [57] for system state model errors. Specifically, the method of determining the forgetting factor enables the filtering algorithm to still maintain a certain optimality when there is an error in the state model or the state is disturbed. Yang Yuanxi and others proposed a robust adaptive filter algorithm [58] to address the status and measurement anomalies existing in dynamic carrier navigation to improve the accuracy of dynamic carrier navigation. Mohamed et al. proposed multi-model based adaptive estimation (MMAE) from the perspective of model adaptation [59]. Compared with a single model, the multi-model adaptive estimation method estimates through a set of parallel filtering estimators, and calculates the model probability at all times, which meets the needs of changing noise sequences in this process and can achieve an adaptive effect.
Depending on the model characteristics and noise characteristics of the navigation systems, the navigation filter algorithms used are also different. Applicable algorithms need to be designed for different navigation systems to improve the accuracy of state estimation. The navigation system will suffer external interference during operation, and this interference may have a greater impact on the state estimation results. Therefore, the stability of the algorithm also needs to be considered. In addition, the lunar navigation system has higher real-time requirements, and the calculation amount and convergence speed of the algorithm need to be considered. Therefore, it is necessary to comprehensively consider the estimation accuracy, stability, convergence and other performance parameters of the algorithm, in order to study the corresponding navigation algorithms and achieve the real-time high-precision autonomous navigation of lunar navigation system satellites.
6. Conclusions
Moon exploration activities will remain an important part of the future international deep space exploration field. The normal operation of missions such as manned Moon landings and the establishment of lunar scientific research stations will multiply the pressure on the ground measurement and control network. The world’s major space countries have successively proposed construction plans for lunar communication and navigation constellations. High-precision orbit determination of navigation constellations is the premise and foundation for providing high-precision navigation services. This article systematically analyzes the current status of lunar relay navigation constellations at home and abroad, summarizes the technical principles of single-satellite and constellation navigation and orbit determination, discusses the technical difficulties in lunar navigation constellation orbit determination and navigation, and analyzes possible solutions. Finally, the development trend of research on high-precision orbit determination and navigation methods for lunar navigation constellations is proposed.
Author Contributions
X.Z. is the first author who is responsible for this paper; Z.S. supervised X.Z. for this paper. X.C., L.P. and Y.Z. provided useful information for this paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research and APC were funded by National Natural Science Foundation of China grant number 12102265.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Angelopoulos, V. The ARTEMIS Mission; Springer: Berlin/Heidelberg, Germany, 2014; pp. 3–25. [Google Scholar]
- Johnson, S.K.; Mortensen, D.J.; Chavez, M.A.; Woodland, C.L. Gateway—A communications platform for lunar exploration. In Proceedings of the 38th International Communications Satellite Systems Conference (ICSSC 2021), Arlington, WV, USA, 27–30 September 2021; IET: London, UK, 2021; Volume 2021. [Google Scholar]
- Köpping, A.H. The moon village and space 4.0: The ‘open concept’ as a new way of doing space? Space Policy 2019, 49, 101323. [Google Scholar] [CrossRef]
- Zhou, C.; Jia, Y.; Liu, J.; Li, H.; Fan, Y.; Zhang, Z.; Liu, Y.; Jiang, Y.; Zhou, B.; He, Z.; et al. Scientific objectives and payloads of the lunar sample return mission—Chang’E-5. Adv. Space Res. 2022, 69, 823–836. [Google Scholar] [CrossRef]
- Sun, X.; Chao, H.; Chen, P. Real-time precise orbit determination of LEO satellites using a single-frequency GPS receiver: Preliminary results of Chinese SJ-9A satellite. Adv. Space Res. 2017, 60, 1478–1487. [Google Scholar] [CrossRef]
- Montenbruck, O.; Swatschina, P.; Markgraf, M.; Santandrea, S.; Naudet, J.; Tilmans, E. Precision spacecraft navigation using a low-cost GPS receiver. GPS Solut. 2012, 16, 519–529. [Google Scholar] [CrossRef]
- Yang, Y.; Yue, X.; Dempster, A.G. GPS-based onboard real-time orbit determination for LEO satellites using consider Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 769–777. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hackel, S.; Wermuth, M.; Zangerl, F. Sentinel-6A precise orbit determination using a combined GPS/Galileo receiver. J. Geod. 2021, 95, 109. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O. Precise on-board navigation of LEO satellites with GNSS broadcast ephemerides. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Online, 22–25 September 2020. [Google Scholar]
- Israel, D.J.; Mauldin, K.D.; Roberts, C.J.; Mitchell, J.W.; Pulkkinen, A.A.; La Vida, D.C.; Johnson, M.A.; Christe, S.D.; Gramling, C.J. Lunanet: A flexible and extensible lunar exploration communications and navigation infrastructure. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Giordano, P.; Malman, F.; Swinden, R.; Zoccarato, P.; Ventura-Traveset, J. The Lunar Pathfinder PNT experiment and Moonlight navigation service: The future of lunar position, navigation and timing. In Proceedings of the 2022 International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 25–27 January 2022. [Google Scholar]
- Zini, E.E. Precise Orbit Determination Techniques for a Lunar Satellite Navigation System. Master’s Thesis, Politecnico di Torino, Torino, Italy, 2021. [Google Scholar]
- Offord Harle, N.; Oates, C.; Bywater, S.; Cranstoun, C.; Friend, J.; Lay, G.; Schwarz, B.; Stevens, P.; Hufenbach, B.; Liuicci, F.; et al. Lunar comms and nav infrastructure–first data relay orbiter Lunar Pathfinder, operational in 2024, paves the way for full constellation by 2030s. ASCEND 2021, 2021, 4132. [Google Scholar]
- Commstar Space Communications. Intention to Deploy Next-Generation Hybrid Data Relay Satellite Between the Earth and the Moon by 2023. 2020. Available online: https://commstar.space/news/commstar-space-communications-launch-announcement/ (accessed on 10 October 2020).
- Ma, L.; Xie, P.; Liu, D.; Wu, Y. Research on the Influence of China’s Commercial Spaceflight on the Economic and Social Development of the Regions Along the Belt and Road. New Space 2019, 7, 223–234. [Google Scholar] [CrossRef]
- Palmerini, G.B.; Sabatini, M.; Perrotta, G. En route to the Moon using GNSS signals. Acta Astronaut. 2009, 64, 467–483. [Google Scholar] [CrossRef]
- Flanegan, M.; Gal-Edd, J.; Anderson, L.; Warner, J.; Ely, T.; Lee, C.; Shah, B.; Vaisnys, A.; Schier, J. NASA lunar communication and navigation architecture. In Proceedings of the SpaceOps 2008 Conference, Heidelberg, Germany, 12–16 May 2008. [Google Scholar]
- Xu, M.; Wang, S.; Zhao, W. Why did Chang’e build a Magpie Bridge before exploring the moon? Nanfang Daily 2024, A08. [Google Scholar] [CrossRef]
- Moyer, T.D. Formulation for Observed and Computed Values of Deep Space Network Data Types for Navigation; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Lin, K. Lectures on Space Geodesy—Lecture 8 Very Long Baseline Interferometry (Part 1). Bull. Surv. Mapp. 1983, 02, 43–47. [Google Scholar]
- Hornig, A.; Homeister, M. TYCHO: Demonstrator and operational satellite mission to Earth–Moon-Libration point EML-4 for communication relay provision as a service. Acta Astronaut. 2015, 108, 156–170. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Zhang, X.; Zhang, W. Research on the filter algorithm for integrated autonomous navigation based on angle and velocity measurementin deep space. Sci. Sin. Phys. Mech. Astron. 2022, 52, 214509. [Google Scholar] [CrossRef]
- Xue, X.; Zhang, H.; Kong, D. A review of astronomical autonomous navigation technology for deep space exploration. Astron. Res. Technol. 2017, 14, 382–391. [Google Scholar]
- Battin, R.H. An Introduction to the Mathematics and Methods of Astrodynamics; Aiaa: Reston, VA, USA, 1999. [Google Scholar]
- Duxbury, T.C.; Born, G.H.; Jerath, N. Viewing phobos and deimos for navigating mariner 9. J. Spacecr. Rocket. 1974, 11, 215–222. [Google Scholar] [CrossRef]
- Bhaskaran, S.; Desai, S.; Dumont, P.; Kennedy, B.; Null, G.; Owen, W., Jr.; Riedel, J.; Synnott, S.; Werner, R. Orbit Determination Performance Evaluation of the Deep Space 1 Autonomous Navigation System; NASA: Washington, DC, USA, 1998.
- Mastrodemos, N.; Kubitschek, D.G.; Synnott, S.P. Autonomous navigation for the deep impact mission encounter with comet tempel 1. Space Sci. Rev. 2005, 117, 95–121. [Google Scholar] [CrossRef]
- Ma, P.B.; Baoyin, H.X.; Mu, J.S. Autonomous navigation of Mars probe based on optical observation of Martian moon. Opt. Precis. Eng. 2014, 22, 863–869. [Google Scholar]
- You, W. Multi-Vector Fusion Mechanism and Estimation Method for Astronomical Velocity Measurement and Navigation in Deep Space Exploration. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2020. [Google Scholar]
- Downs, G.S. Interplanetary Navigation Using Pulsating Radio Sources; No. JPL-TR-32-1594; NASA: Washington, DC, USA, 1974.
- Sheikh, S.I. The Use of Variable Celestial X-Ray Sources for Spacecraft Navigation; University of Maryland: College Park, MD, USA, 2005. [Google Scholar]
- Wang, H. NASA has completed the world’s first space validation of XNAV. Chin. J. Space Sci. 2018, 38, 277–278. [Google Scholar]
- Zheng, S.; Ge, M.; Han, D.; Wang, W.; Chen, Y.; Lu, F.; Bao, T.; Chai, J.; Dong, Y.; Feng, M.; et al. Test of pulsar navigation with POLAR on TG-2 space station. Sci. Sin. Phys. Mech. Astron. 2017, 47, 099505. [Google Scholar] [CrossRef]
- Lin, Q.; Huang, L.; Shuai, P. TOA estimation methods for the observation data based on the X-ray Pulsar-based Navigation-1 (XPNAV-1) satellite. Chin. Space Sci. Technol. 2017, 38, 1–7. [Google Scholar]
- Zheng, S.J.; Zhang, S.N.; Lu, F.J.; Wang, W.B.; Gao, Y.; Li, T.P.; Song, L.M.; Ge, M.Y.; Han, D.W.; Chen, Y.; et al. In-orbit demonstration of X-ray pulsar navigation with the Insight-HXMT satellite. Astrophys. J. Suppl. Ser. 2019, 244, 1. [Google Scholar] [CrossRef]
- Shuai, P.; Chen, S.; Wu, Y.; Zhang, C.; Li, M. Navigation principles using X-ray pulsars. J. Astronaut. 2007, 06, 1538–1543. [Google Scholar]
- Zhang, W.; Chen, X.; You, W.; Zhang, W.; Fang, X. New autonomous navigation method based on redshift. Shanghai Aerosp. 2013, 30, 32–33+38. [Google Scholar]
- Franklin, R.G.; Birx, D.L. A study of natural electromagnetic phenomena for space navigation. Proc. IRE 1960, 48, 532–541. [Google Scholar] [CrossRef]
- Guo, Y. Self-contained autonomous navigation system for deep space missions. Spacefl. Mech. 1999, 1999, 1099–1113. [Google Scholar]
- Yim, J.; Crassidis, J.; Junkins, J. Autonomous orbit navigation of interplanetary spacecraft. In Proceedings of the Astrodynamics Specialist Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar]
- Liu, J.; Fang, J.C.; Yang, Z.H.; Kang, Z.W.; Wu, J. X-ray pulsar/Doppler difference integrated navigation for deep space exploration with unstable solar spectrum. Aerosp. Sci. Technol. 2015, 41, 144–150. [Google Scholar] [CrossRef]
- Ning, X.; Gui, M.; Fang, J.; Liu, G.; Dai, Y. A novel differential Doppler measurement-aided autonomous celestial navigation method for spacecraft during approach phase. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 587–597. [Google Scholar] [CrossRef]
- Zhang, H. Research and Implementation of Key Technologies for Improving Space Target Laser Ranging Capability. Master’s Thesis, Shandong University of Science and Technology, Qingdao, China, 2020. [Google Scholar]
- Verhagen, S.; Teunissen, P.J. Least-squares estimation and Kalman filtering. In Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 639–660. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Bucy, R.S.; Senne, K.D. Digital synthesis of non-linear filters. Automatica 1971, 7, 287–298. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Witternigg, N.; Obertaxer, G.; Schönhuber, M.; Palmerini, G.B.; Rodriguez, F.; Capponi, L.; Soualle, F.; Floch, J.J. Weak GNSS signal navigation for Lunar exploration missions. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Zhang, C. Research on adaptive filter methods. Chin. J. Aeronaut. 1998, S1, 97–100. [Google Scholar]
- Wei, W.; Qin, Y.; Zhang, X.; Zhang, Y. Improvement of Sage-Husa algorithm. J. Chin. Inert. Technol. 2012, 20, 678–686. [Google Scholar]
- Xia, Q.; Sun, Y.; Zhou, C. Optimal adaptive algorithm of vanishing Kalman filter and its application. J. Autom. 1990, 03, 210–216. [Google Scholar]
- Qian, H.; Ge, L.; Yu, P. Multi-evanescent factor Kalman filter and its application in SINS initial alignment. J. Chin. Inert. Technol. 2012, 20, 287–291. [Google Scholar]
- Duan, S.; Sun, W.; Wu, Z. Application of error-resistant adaptive EKF in INS/GNSS tight combination. J. Univ. Electron. Sci. Technol. China 2019, 48, 216–220. [Google Scholar]
- Yang, Y.; He, H.; Xu, T. On dynamic adaptive filter. Acta Geod. Cartogr. Sin. 2001, 04, 293–298. [Google Scholar]
- Yang, Y.; Ren, X.; Xu, Y. Main progress in the theory and application of adaptive robust filter. J. Navig. Position. 2013, 1, 9–15. [Google Scholar]
- Sage, A.P.; Husa, G.W. Adaptive filter with unknown prior statistics. In Proceedings of the Tenth Joint Automatic Control Conference, Boulder, CO, USA, 5–7 August 1969. No. 7. [Google Scholar]
- Fagin, S.L. Recursive linear regression theory, optimal filter theory, and error analysis of optimal systems. In IEEE International Convention Record; No. Part 1; IEEE: Piscataway, NJ, USA, 1964; Volume 12. [Google Scholar]
- Yang, Y. Adaptive Dynamic Navigation and Positioning; Surveying and Mapping Press: Beijing, China, 2006; pp. 10–40. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filter for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Li, X. Analytical configuration uncertainty propagation of geocentric interferometric detection constellation. Astrodynamics 2023, 7, 271–284. [Google Scholar] [CrossRef]
- Le, L. Star selection algorithm for GNSS/pseudolite combined positioning. Electron. Test 2020, 13, 41–43+73. [Google Scholar]
- Feng, B.; Chai, H.; Pan, Z.; Wang, M.; Yang, K. An improved star selection algorithm for integrated navigation systems. Eng. Surv. Mapp. 2018, 27, 26–31. [Google Scholar]
- Peng, S.; Guo, C.; Liu, F. Research on fast star selection algorithm in Beidou/GPS dual-mode positioning. GNSS World China 2017, 42, 11–14. [Google Scholar]
- Wang, E.; Jia, C.; Qu, P.; Huang, Y.; Pang, T.; Bie, Y.; Jiang, Y. Beidou/GPS integrated navigation star selection algorithm based on chaotic particle swarm optimization. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 259–265. [Google Scholar]
- Zhang, J.; Li, J.; Hu, C. Satellite navigation and positioning solution method based on Cubature Kalman filter. J. Univ. Chin. Acad. Sci. 2021, 38, 532–537. [Google Scholar]
- Zhang, J.; Yang, Y.; Qian, F. Research on GNSS/INS error feedback correction based on Kalman filter-neural network prediction. Electron. Des. Eng. 2015, 23, 103–105. [Google Scholar]
- Carlson, N.A. Federated square root filter for decentralized parallel processors. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 517–525. [Google Scholar] [CrossRef]
- Wu, L.; Sun, Y.; Chen, C. Multi-constellation integrated navigation adaptive information fusion filter algorithm. Aerosp. Control 2010, 28, 38–42+62. [Google Scholar]
- Zhang, Y.; Jiang, X.; Yang, W.; Liu, J.; Wei, Y. Research on joint positioning technology of GNSS systems based on Kalman filter. Electron. Meas. Technol. 2021, 44, 109–113. [Google Scholar]
- Menn, M.D.; Bernstein, H. Ephemeris observability issues in the global positioning system (GPS) autonomous navigation (AUTONAV). In Proceedings of 1994 IEEE Position, Location and Navigation Symposium-PLANS’94; IEEE: Piscataway, NJ, USA, 1994. [Google Scholar]
- Guo, S.; Cai, H.; Meng, Y.; Geng, C.; Jia, X.; Mao, Y.; Geng, T.; Mao, Y.; Zhang, Y.; Xie, X. Beidou-3 navigation and positioning technology system and service performance. Acta Geod. Cartogr. Sin. 2019, 48, 810–821. [Google Scholar]
- Li, Z.; Xin, J.; Guo, R.; Li, X.; Tang, C.; Tian, Y. Feasibility analysis of autonomous satellite navigation based on Beidou inter-satellite link. Geomat. Inf. Sci. Wuhan Univ. 2022, 47, 55–60. [Google Scholar]
- Shao, R.; Chang, J.; Lin, X.; Tan, S.; Gong, W.; Lin, B. An orbit determination algorithm suitable for extended users between Beidou-3 satellites. Chin. Space Sci. Technol. 2024, 44, 106–113. [Google Scholar]
- Yang, Y.; Yang, Y.; Hu, X.; Tang, C.; Zhao, L.; Xu, J. Comparative analysis of the accuracy of two orbit determination modes of Beidou-3 satellite. Acta Geod. Cartogr. Sin. 2019, 48, 831–839. [Google Scholar]
- Zhou, Y. Research on Key Technologies for Autonomous Orbit Determination of User Spacecraft Based on the Beidou Interstellar Link. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2020. [Google Scholar]
- Zhang, W.; Wang, X.; Cui, W.; Zhao, Z.; Chen, S. Self-induced collision risk of the Starlink constellation based on long-term orbital evolution analysis. Astrodynamics 2023, 7, 445–453. [Google Scholar] [CrossRef]
- Abusali, P.A.M.; Tapley, B.D.; Schutz, B.E. Autonomous navigation of global positioning system satellites using cross-link measurements. J. Guid. Control. Dyn. 1998, 21, 321–327. [Google Scholar] [CrossRef]
- Lin, L.; Liu, Y. On the problem of deficient rank in autonomous orbit determination with star-to-star relative measurements. J. Spacecr. TTC Technol. 2000, 19, 1–4. [Google Scholar]
- Chen, J.; Jiao, W.; Ma, J.; Song, X. Research on autonomous orbit determination of navigation satellites based on inter-satellite ranging/orbit orientation parameter constraints. Geomat. Inf. Sci. Wuhan Univ. 2005, 05, 439–443. [Google Scholar]
- Tang, C. Fusion of Multiple Observation Data to Calculate High-Precision Broadcast Ephemeris of Beidou Navigation Satellites. Master’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2016. [Google Scholar]
- Gong, X. Research on Centralized Autonomous Real-Time Orbit Determination and Time Synchronization Method of Beidou System. Ph.D. Thesis, Wuhan University, Wuhan, China, 2013. [Google Scholar]
- Zhang, W.; Liu, W.; Gong, X. Analysis of the impact of EOP forecast errors on autonomous orbit determination results. J. Geod. Geodyn. 2011, 31, 106–110. [Google Scholar]
- Zhao, Q.; Liu, J.; Ge, M. Research on precision orbit determination theory and software of GPS navigation constellations and low-orbit satellites. Geomat. Inf. Sci. Wuhan Univ. 2005, 30, 1. [Google Scholar]
- Liu, W. Method Research and Simulation Calculation of Navigation Satellite Autonomous Orbit Determination and Satellite-Ground Joint Orbit Determination. Ph.D. Thesis, Wuhan University, Wuhan, China, 2008. [Google Scholar]
- Zhao, D.; Zhou, H.; Wang, Z. Joint orbit determination data fusion modeling and optimal weighting algorithm based on multi-source observations. J. Syst. Simul. 2008, 10, 2515–2519. [Google Scholar]
- Song, X. Research on Orbit Determination of COMPASS Navigation Satellite. Ph.D. Thesis, Chang’an University, Xi’an, China, 2008. [Google Scholar]
- Li, Z.; Huang, J. GPS Measurement and Data Processing; Wuhan University: Wuhan, China, 2005; pp. 40–42. [Google Scholar]
- Cai, Z.; Han, C.; Chen, J. Constellation rotation error analysis and control of long-term autonomous orbit determination of navigation satellites. J. Astronaut. 2008, 02, 522–528. [Google Scholar]
- Ruan, R.; Feng, L.; Jia, X. Equipment delay estimation method in navigation satellite-ground/inter-satellite link joint orbit determination. Acta Geod. Cartogr. Sin. 2014, 43, 137–142+157. [Google Scholar]
- Shuai, P.; Qu, G. Time synchronization technology for autonomous navigation of navigation constellations. Acta J. Astronaut. 2005, 06, 768–772. [Google Scholar]
- Chen, Z. Research on Key Technologies for Autonomous Operation of Navigation Satellite Constellations Based on Inter-Satellite Links. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2012. [Google Scholar]
- Hill, K.; Born, G.H.; Lo, M.W. Linked, Autonomous, Interplanetary Satellite Orbit Navigation(LiAISON) in Lunar Halo Orbits. Adv. Astronaut. Sci. 2006, 123, 2369–2388. [Google Scholar]
- Hill, K.; Parker, J.; Born, G.; Demandante, N. A lunar L2 navigation, communication, and gravity mission. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Hill, K.; Parker, J.; Born, G.H.; Lo, M.W. Low-cost lunar communication and navigation. In CCAR White Paper 5; 2006. Available online: https://www.researchgate.net/publication/237404072_LOW-COST_LUNAR_COMMUNICATION_AND_NAVIGATION (accessed on 17 June 2024).
- Hill, K.A.; Born, G.H. Autonomous orbit determination from lunar halo orbits using crosslink range. J. Spacecr. Rocket. 2008, 45, 548–553. [Google Scholar] [CrossRef]
- Parker, J.; Anderson, R.; Born, G.; Fujimoto, K.; Leonard, J.; McGranaghan, R. Navigation between geosynchronous and lunar L1 orbiters. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Parker, J.S.; Leonard, J.M.; Anderson, R.L.; Born, G.H. LiAISON-supplemented navigation of a crewed vehicle in a lunar halo orbit. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Hilton Head, SC, USA, 11–15 August 2013. No. AAS 13-776. [Google Scholar]
- Hesar, S.G.; Parker, J.S.; Leonard, J.M.; McGranaghan, R.M.; Born, G.H. Lunar far side surface navigation using linked autonomous interplanetary satellite orbit navigation (LiAISON). Acta Astronaut. 2015, 117, 116–129. [Google Scholar] [CrossRef]
- Du, L. Inter-satellite ranging and orbit determination of Halo-lunar orbit under circular restricted three-body problem. Acta Geod. Cartogr. Sin. 2013, 42, 184–190. [Google Scholar]
- Liu, P.; Hou, X.Y.; Tang, J.S.; Liu, L. Application of two special orbits in the orbit determination of lunar satellites. Res. Astron. Astrophys. 2014, 14, 1307. [Google Scholar] [CrossRef]
- Huang, Y.; Yang, P.; Chen, Y.; Li, P.; Zhou, S.; Tang, C.; Hu, X. Interstellar ranging and autonomous orbit determination of the Earth-Moon space probe. Sci. Sin. (Phys. Mech. Astron.) 2023, 53, 132–144. [Google Scholar]
- Cheetham, B.; Gardner, T.; Forsman, A.; Kayser, E.; Clarkson, M. Capstone: A unique CubeSat platform for a navigation demonstration in cislunar space. In Proceedings of the ASCEND 2022, Las Vegas, NV, USA, 24–26 October 2022; p. 4382. [Google Scholar]
- Li, X. Research on Precise Orbit Determination of Lunar Probes Using Combined Orbit Measurement VLBI, USB and Space VLBI Technology. Ph.D. Thesis, Wuhan University, Wuhan, China, 2016. [Google Scholar]
- Qi, Y. Anton de Ruiter. Trajectory correction for lunar flyby transfers to libration point orbits using continuous thrust. Astrodynamics 2022, 6, 285–300. [Google Scholar] [CrossRef]
- Muralidharan, V.; Howell, K.C. Stretching directions in cislunar space: Applications for departures and transfer design. Astrodynamics 2023, 7, 153–178. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).