
An Advanced Control Method for Aircraft Carrier Landing of UAV Based on CAPF–NMPC

Abstract
1. Introduction
2. Problem Formulation
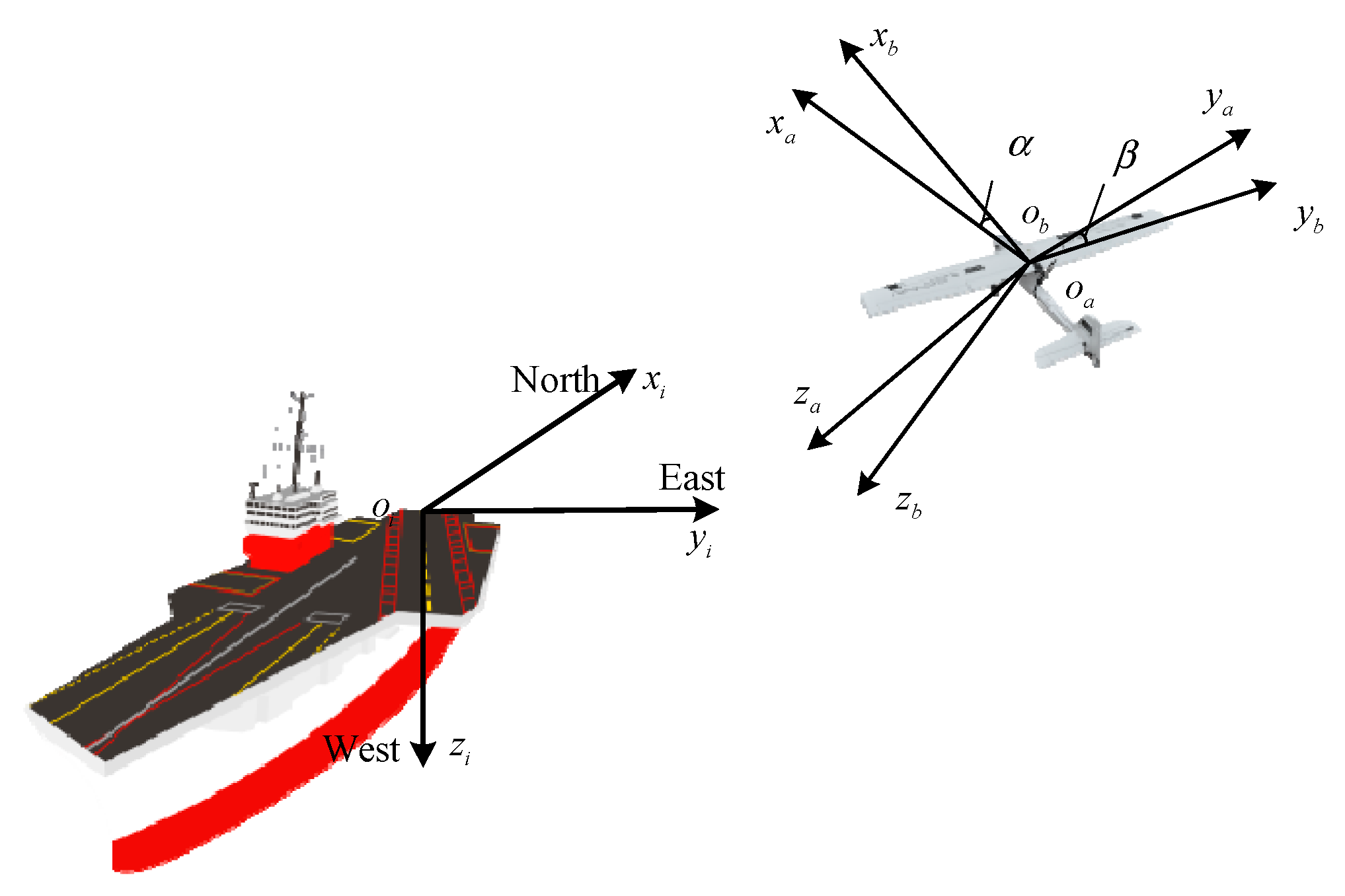
2.1. The Nonlinear Dynamic Model of UAV
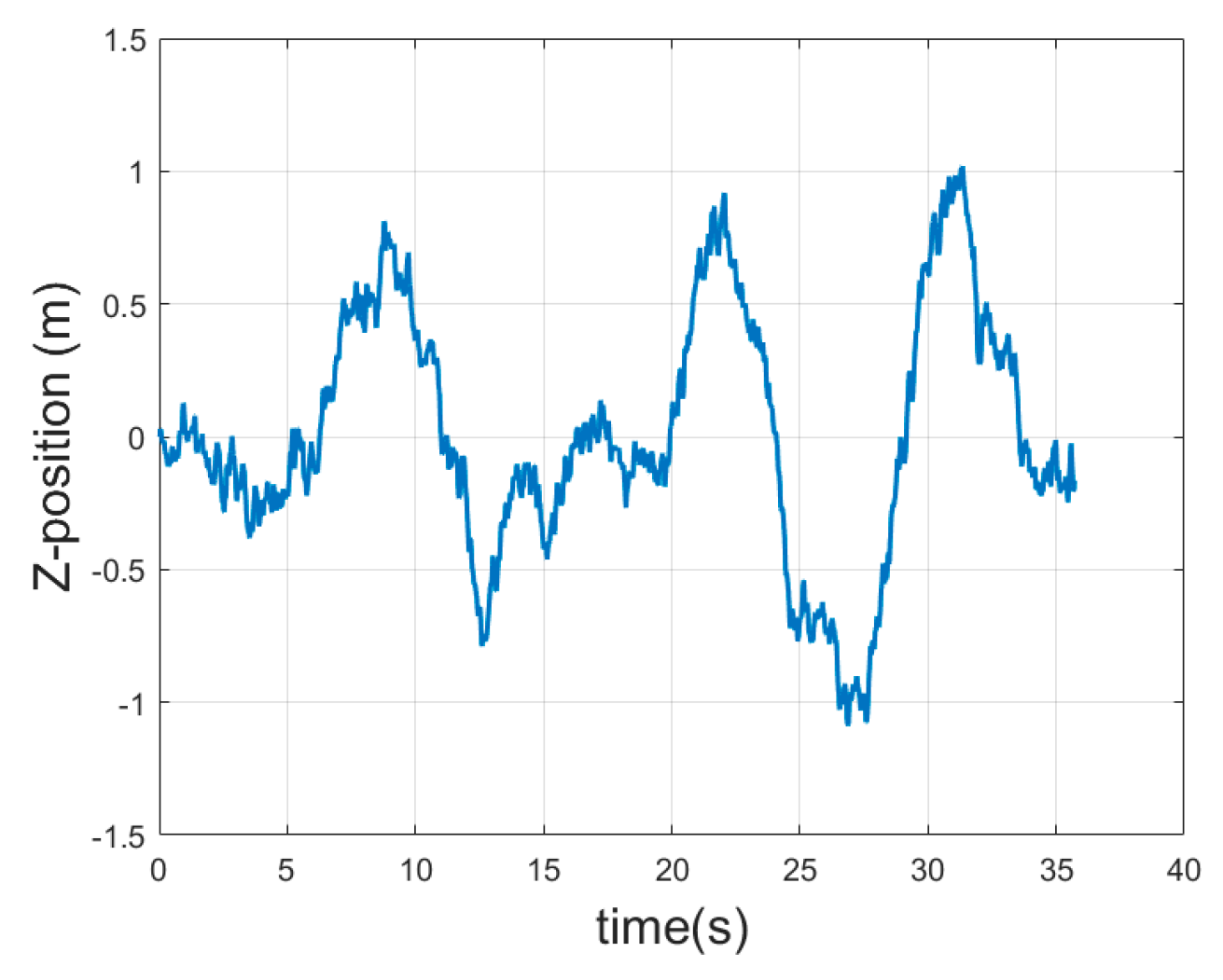
2.2. Aircraft Carrier Motion Model
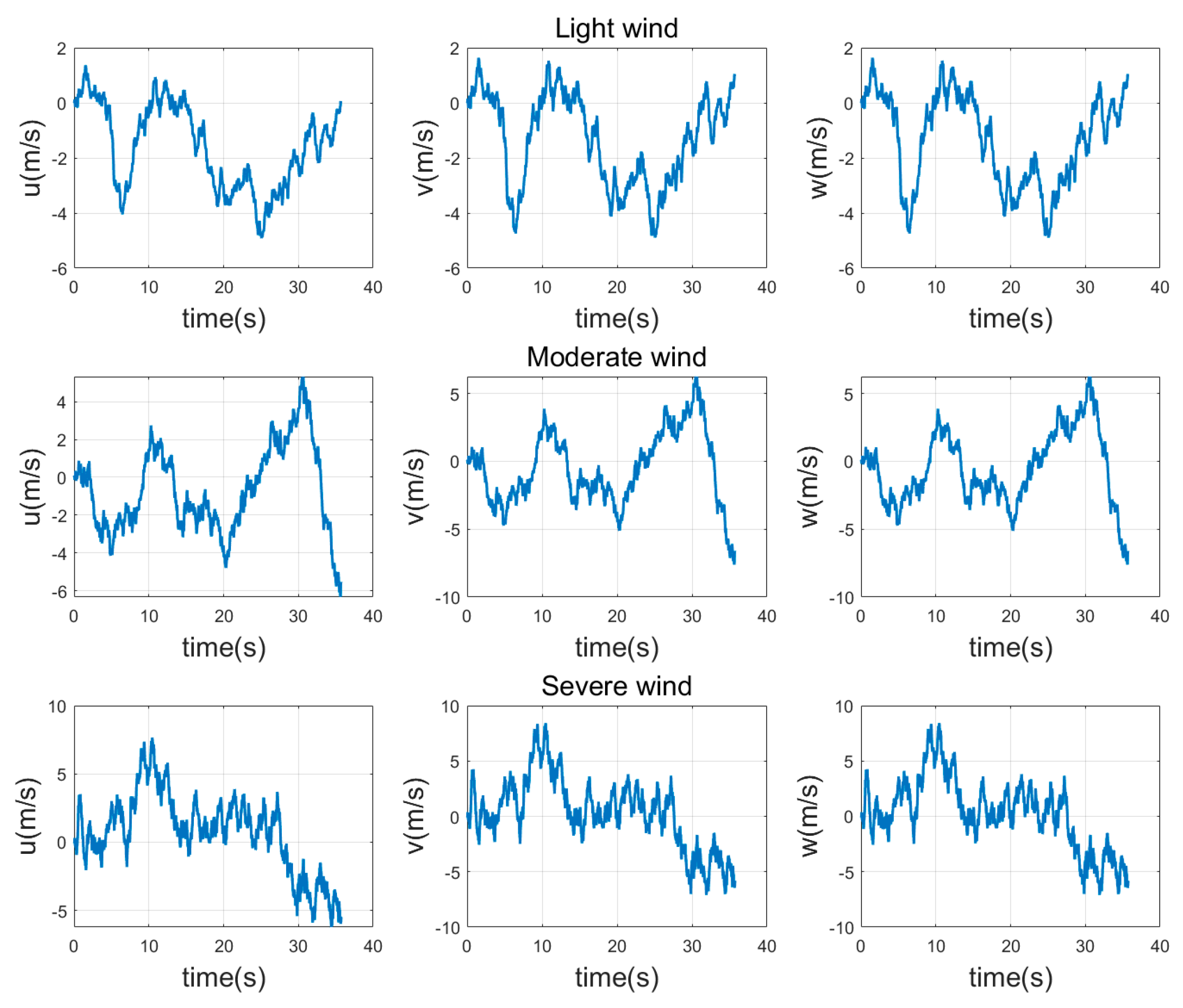
2.3. Disturbance Model of Wind Field
- The free atmospheric turbulence component: , , ;
- Steady-state component of wake flow: , ;
- Wake periodic component: , ;
- Wake random component , , ;
3. Automatic Carrier Landing System
3.1. Prediction of the Deck Motion
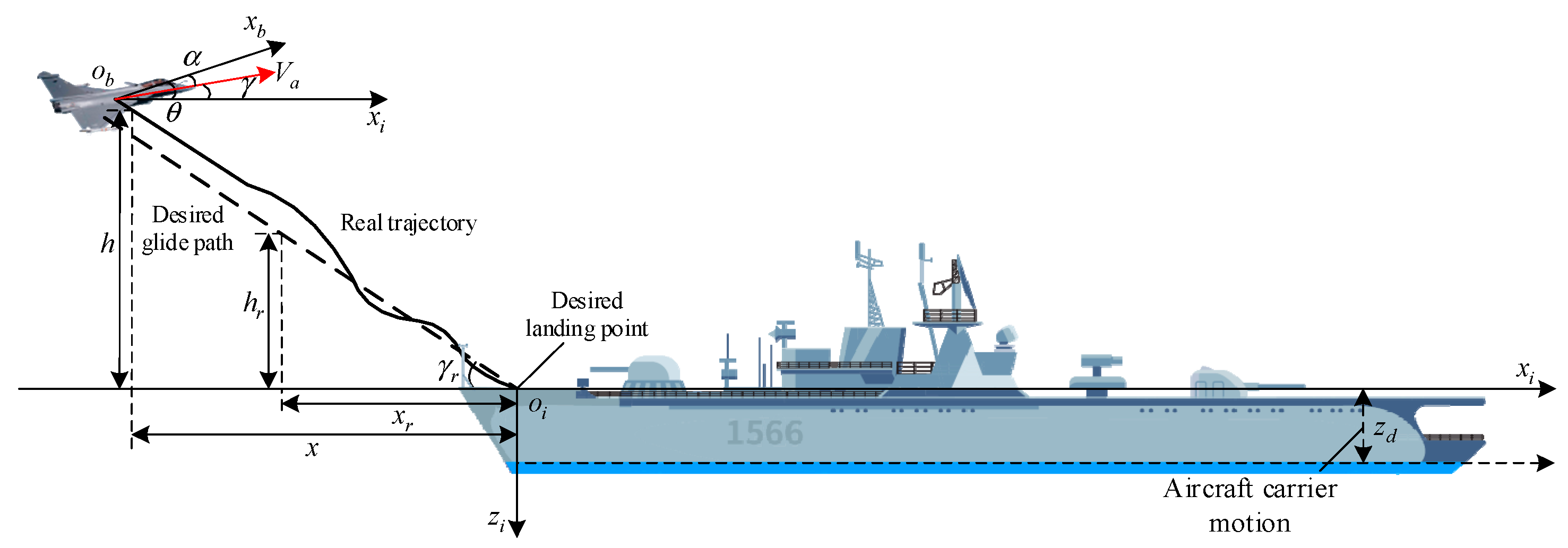
3.2. Design of Aircraft Reference Trajectory
3.3. Design of the Optimal Controller
4. Improved CAPF–NMPC Method
4.1. CAPF–NMPC Algorithm
4.2. Incremental Importance Sampling
4.3. Hybrid Constraint Method
| Algorithm 1: NMPC Based on Improved Constraint-Aware Particle Filtering/Smoothing. |
| 1: Initialize CAPF–NMPC parameters |
| 2: Create a standard glide slope with sea wave motion |
| 3: for do |
| Forward filtering |
| 4: for do |
| 5: Sample based on the previous time by Equation (30) |
| 6: Kinetic equation recursion each particle by Equation (9) 7: Constrain the control vector by Equation (36) |
| 8: Evaluate sample weights by Equation (35) |
| 9: Do resampling based on the weights |
| 10: end for |
| Backward smoothing 11: end for |
| 12: Compute the optimal estimation of by Equation (20) 13: Export , and apply it to the system Equation (1) |
5. Numerical Simulations
5.1. Scenario Description
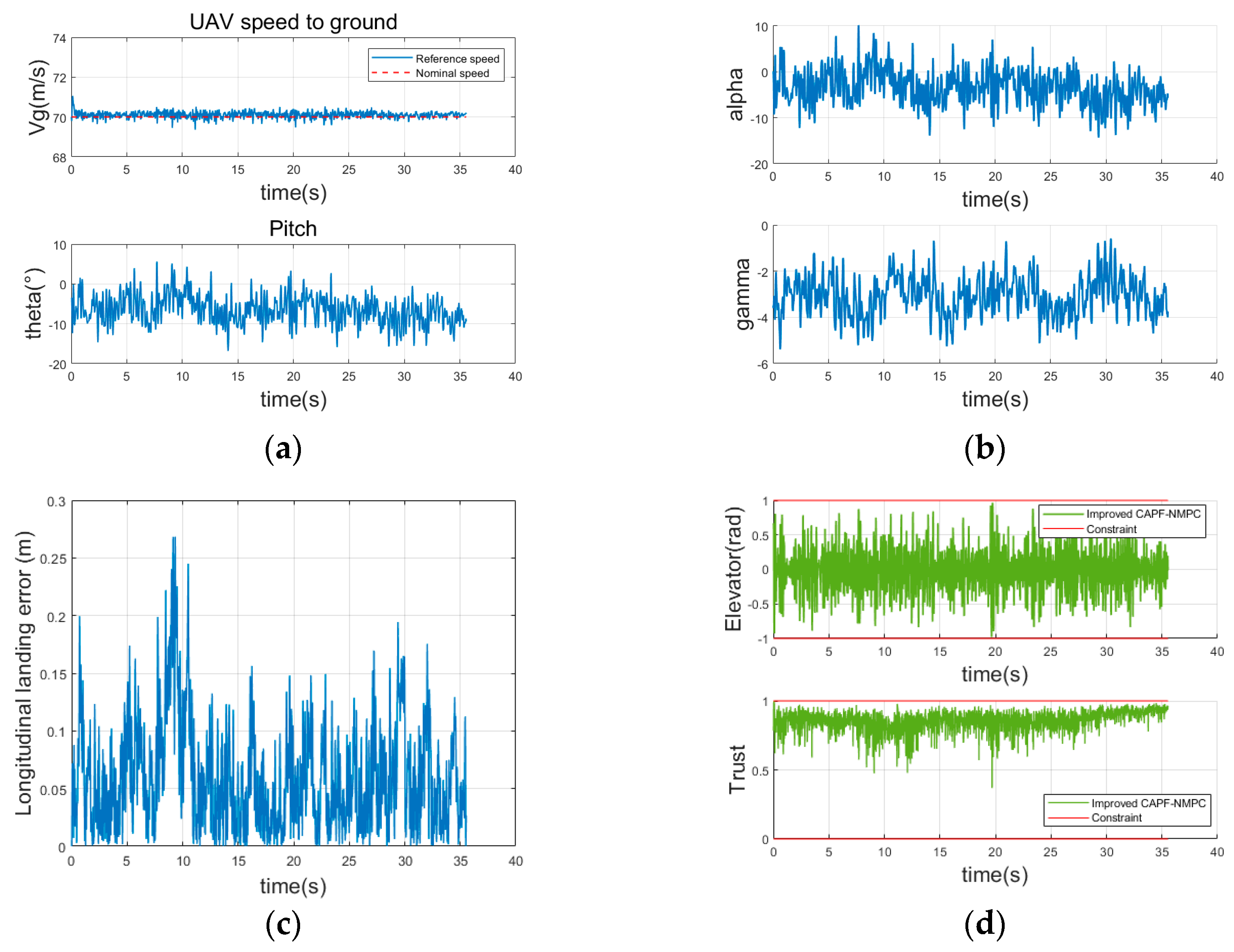
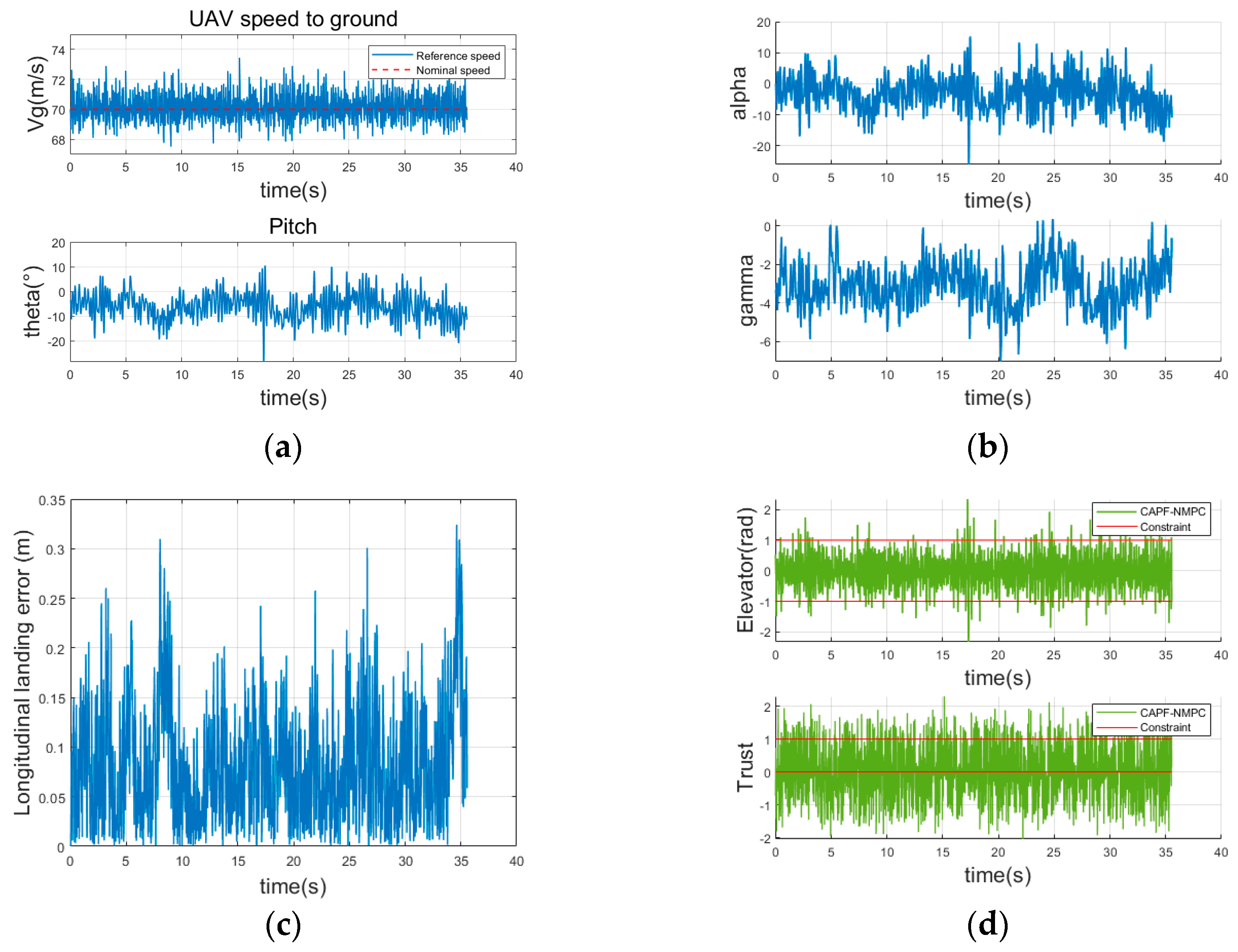
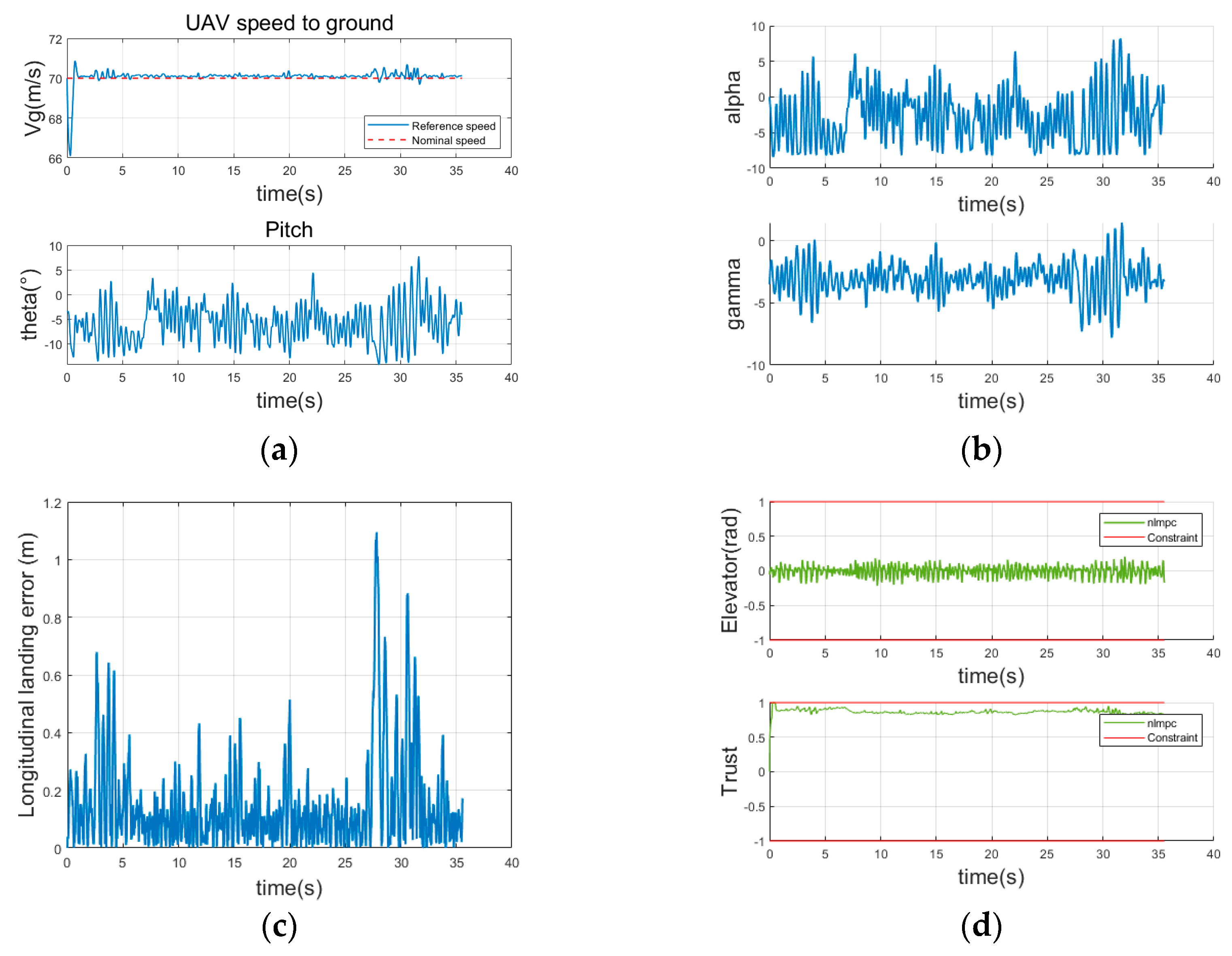
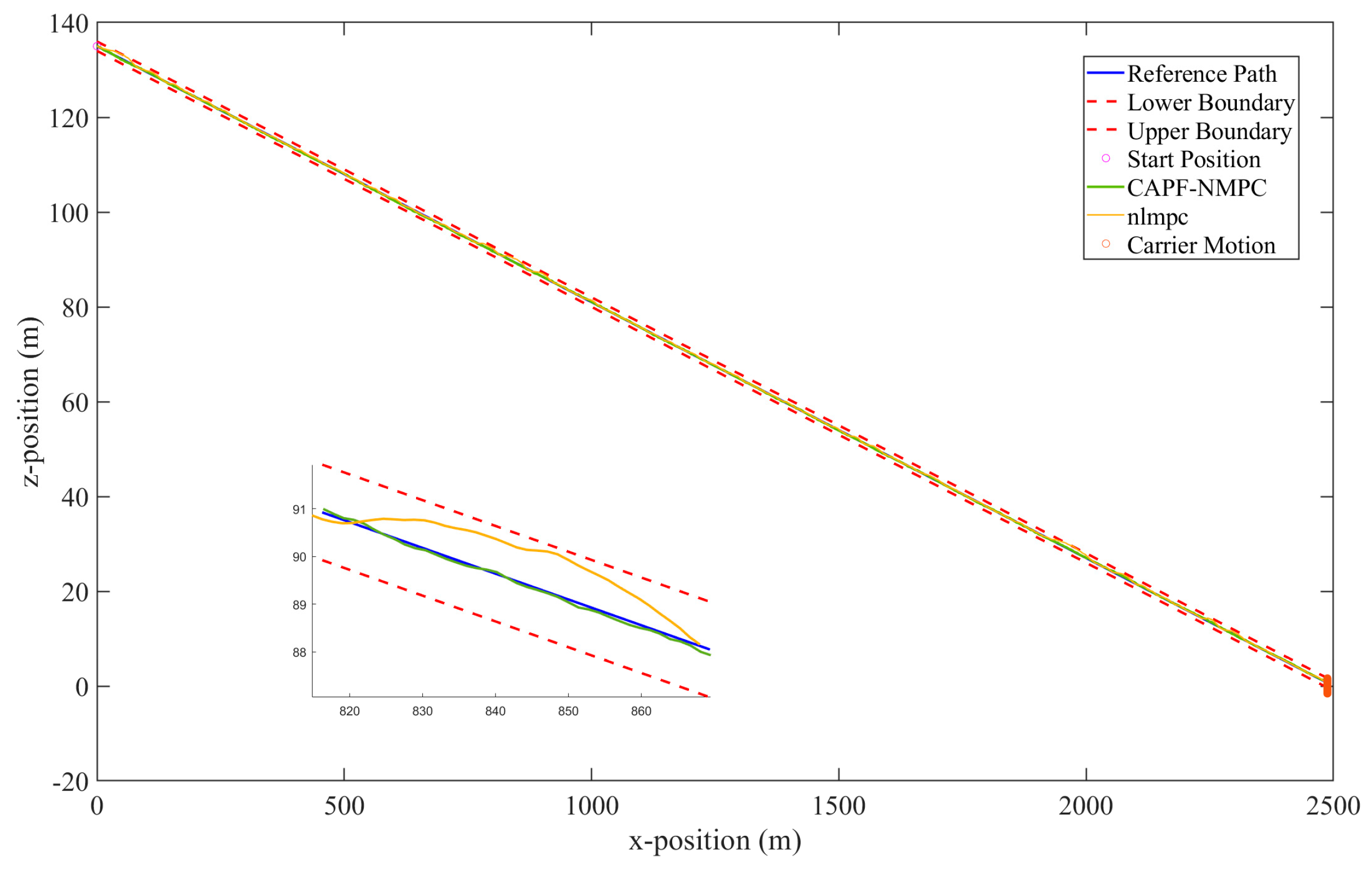
5.2. Analysis of Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.; Wang, H.; Li, N.; Su, Z.; Wu, J. Automatic carrier landing system based on active disturbance rejection control with a novel parameters optimizer. Aerosp. Sci. Technol. 2017, 69, 149–160. [Google Scholar] [CrossRef]
- Lungu, M.; Chen, M.; Vîlcică, D.-A. Backstepping-and sliding mode-based automatic carrier landing system with deck motion estimation and compensation. Aerospace 2022, 9, 644. [Google Scholar] [CrossRef]
- Yao, Z.; Kan, Z.; Zhen, C.; Shao, H.; Li, D. Fault-Tolerant Control for Carrier-Based UAV Based on Sliding Mode Method. Drones 2023, 7, 194. [Google Scholar] [CrossRef]
- Xue, Y.; Tao, C.; Zhen, Z.; Cao, T. Adaptive Sliding Mode Fault-Tolerant Control for Automatic Carrier Landing with Actuator Faults. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 58–62. [Google Scholar]
- Xue, Y.; Zhen, Z.; Zhang, Z.; Cao, T.; Wan, T. Automatic carrier landing for UAV based on integrated disturbance observer and fault-tolerant control. Aircr. Eng. Aerosp. Technol. 2023, 95, 1247–1256. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, K.; Zhang, D.; Wang, S.; Zhu, Q.; Gao, X. Composite anti-disturbance landing control scheme for recovery of carrier-based UAVs. Asian J. Control 2022, 24, 1744–1754. [Google Scholar] [CrossRef]
- Lu, K.; Liu, C. A L1 Adaptive Control Scheme for UAV Carrier Landing Using Nonlinear Dynamic Inversion. Int. J. Aerosp. Eng. 2019, 2019, 6917393. [Google Scholar] [CrossRef]
- Luo, F.; Zhang, J.; Lyu, P.; Liu, Z.; Tang, W. Carrier-based aircraft precision landing using direct lift control based on incremental nonlinear dynamic inversion. IEEE Access 2022, 10, 55709–55725. [Google Scholar] [CrossRef]
- Wan, B.; Pan, Z.; Su, X.; Han, W.; Wang, J. A Precise Automatic Landing Control Method Based on the MPC-LQG Algorithm. In Proceedings of the International Conference on Guidance, Navigation and Control, Harbin, China, 5–7 August 2022; Springer Nature: Singapore, 2022; pp. 4928–4939. [Google Scholar]
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Tang, K.; Wang, W.; Meng, Y.; Zhang, M. Flight control and airwake suppression algorithm for carrier landing based on model predictive control. Trans. Inst. Meas. Control 2019, 41, 2205–2213. [Google Scholar] [CrossRef]
- Cui, K.; Han, W.; Liu, Y.; Wang, X.; Su, X.; Liu, J. Model predictive control for automatic carrier landing with time delay. Int. J. Aerosp. Eng. 2021, 2021, 8613498. [Google Scholar] [CrossRef]
- Kang, Y.; Hedrick, J.K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control. IEEE Trans. Control Syst. Technol. 2009, 17, 1202–1210. [Google Scholar] [CrossRef]
- Basescu, M.; Yeh, B.; Scheuer, L.; Wolfe, K.; Moore, J. Precision Post-Stall Landing Using NMPC With Learned Aerodynamics. IEEE Robot. Autom. Lett. 2023, 8, 3031–3038. [Google Scholar] [CrossRef]
- Mathisen, S.; Gryte, K.; Gros, S.; Johansen, T.A. Precision deep-stall landing of fixed-wing UAVs using nonlinear model predictive control. J. Intell. Robot. Syst. 2021, 101, 24. [Google Scholar] [CrossRef]
- Zhou, R.Y.; Neusypin, K.A. Model predictive control for automatic carrier landing considering ship motion. J. Phys. Conf. Ser. 2022, 2022, 012005. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Zhang, X.; He, D.; Liao, F. Iterative model predictive control for automatic carrier landing of carrier-based aircrafts under complex surroundings and constraints. J. Shanghai Jiaotong Univ. (Sci.) 2024, 29, 712–724. [Google Scholar] [CrossRef]
- Reinhardt, D.P. On Nonlinear and Optimization-Based Control of Fixed-Wing Unmanned Aerial Vehicles. Ph.D. Thesis, Norwegian University of Science and Technology, Gjøvik, Norway, 2022; p. 197. [Google Scholar]
- Wang, L.; Zhang, Z.; Zhu, Q.; Wen, Z. Longitudinal automatic carrier-landing control law rejecting disturbances and coupling based on adaptive dynamic inversion. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e136217. [Google Scholar] [CrossRef]
- Wang, B.H.; Wang, D.B.; Ali, Z.A.; Ting, B.T.; Wang, H. An overview of various kinds of wind effects on unmanned aerial vehicle. Meas. Control 2019, 52, 731–739. [Google Scholar] [CrossRef]
- Garnet, T.S. Investigation to Study the Aerodynamic Ship Wake Turbulence Generated by a DD963 Destroyer: ADA083663R; Boeing Vertol Co.: Philadelphia, PA, USA, 1979. [Google Scholar]
- Askari, I.; Zeng, S.; Fang, H. Nonlinear Model Predictive Control Based on Constraint-Aware Particle Filtering/Smoothing. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 3532–3537. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Scale | Name | Wind Speed (m/s) | Wave Height (m) | Highest Wave (m) |
|---|---|---|---|---|
| 0 | Calm wind | 0.0–0.2 | 0.0 | 0.0 |
| 1 | Light wind | 1.6–3.3 | 0.2 | 0.3 |
| 2 | Moderate wind | 5.5–7.9 | 1.0 | 1.5 |
| 3 | Severe wind | 10.8–13.8 | 3.0 | 4.0 |
| Parameters | Value | Unit |
|---|---|---|
| Thrust coefficient | 40.5 | N |
| Elevator Ratio | −2.021 | Dimensionless |
| Lift coefficient | 0.228 | Dimensionless |
| Drag coefficient | 0.0191 | Dimensionless |
| Pitch moment coefficient | 0.107 | Dimensionless |
| Aircraft weight | 9 | |
| Air density | 1.29 | |
| Wing area | 0.743 | |
| Chord length | 0.305 | |
| Pitch moment of inertia | 0.868 |
| Parameters | Value | Unit |
|---|---|---|
| Sampling time | 0.02 | s |
| Prediction horizon | 8 | step |
| Control horizon | 1 | step |
| Particle number | 50 | dimensionless |
| Simulation time | 40 | s |
| Reference speed | 69.69 | m/s |
| Reference path angle | −3.5 | degree |
| Index | nlmpc Method | CAPF–NMPC Method | Improved CAPF–NMPC Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Light | Moderate | Severe | Light | Moderate | Severe | Light | Moderate | Severe | |
| Landing error | 0.104 m | 0.0984 m | 0.129 m | 0.046 m | 0.072 m | 0.058 m | 0.014 m | 0.0632 m | 0.026 m |
| RMSE | 0.0988 m | 0.1594 m | 0.373 m | 0.0384 m | 0.0677 m | 0.1017 m | 0.0294 m | 0.0619 m | 0.0758 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.; Xu, L.; Wang, C. An Advanced Control Method for Aircraft Carrier Landing of UAV Based on CAPF–NMPC. Aerospace 2024, 11, 656. https://doi.org/10.3390/aerospace11080656
Chen D, Xu L, Wang C. An Advanced Control Method for Aircraft Carrier Landing of UAV Based on CAPF–NMPC. Aerospace. 2024; 11(8):656. https://doi.org/10.3390/aerospace11080656
Chicago/Turabian StyleChen, Danhe, Lingfeng Xu, and Chuangge Wang. 2024. "An Advanced Control Method for Aircraft Carrier Landing of UAV Based on CAPF–NMPC" Aerospace 11, no. 8: 656. https://doi.org/10.3390/aerospace11080656
APA StyleChen, D., Xu, L., & Wang, C. (2024). An Advanced Control Method for Aircraft Carrier Landing of UAV Based on CAPF–NMPC. Aerospace, 11(8), 656. https://doi.org/10.3390/aerospace11080656