Abstract
The cislunar space navigation satellite system is essential infrastructure for lunar exploration in the next phase. It relies on high-precision orbit determination to provide the reference of time and space. This paper focuses on constructing a navigation constellation using special orbital locations such as Earth–Moon libration points and distant retrograde orbits (DRO), and it discusses the simplification of planetary perturbation models for their autonomous orbit determination on board. The gravitational perturbations exerted by major solar system bodies on spacecraft are first analyzed. The minimum perturbation required to maintain a precision of 10 m during a 30-day orbit extrapolation is calculated, followed by a simulation analysis. The results indicate that considering only gravitational perturbations from the Moon, Sun, Venus, Saturn, and Jupiter is sufficient to maintain orbital prediction accuracy within 10 m over 30 days. Based on these findings, a method for simplifying the ephemeris is proposed, which employs Hermite interpolation for the positions of the Sun and Moon at fixed time intervals, replacing the traditional Chebyshev polynomial fitting used in the JPL DE ephemeris. Several simplified schemes with varying time intervals and orders are designed. The simulation results of the inter-satellite links show that, with a 6-day orbit arc length, a 1-day lunar interpolation interval, and a 5-day solar interpolation interval, the accuracy loss for cislunar space navigation satellites remains within the meter level, while memory usage is reduced by approximately 60%.
1. Introduction
The cislunar space refers to the region of outer space extending from above Earth’s atmosphere out to the lunar orbit, encompassing near-Earth space, Earth–Moon transfer space, and lunar space. With the rapid advancement of space technology, global mission profiles are progressively extending into the cislunar domain and using it as a home base for further deep space exploration. Undoubtedly, the cislunar region is emerging as a focal area for human space endeavors.
As exploration of the cislunar space advances, establishing a lunar navigation system becomes crucial for supporting lunar science and resource utilization [1]. While near-Earth spacecraft gain high-precision navigation from GNSS, no equivalent infrastructure exists for the Moon, resulting in poor navigation accuracy during Earth–Moon transfers and in lunar orbit or in the vicinity [2]. Hill [3] proposed an autonomous navigation scheme leveraging the dynamical asymmetry at the Earth–Moon collinear libration points: deploying navigation satellite constellations in these regions to alleviate inter-satellite ranging rank deficiency and obtain absolute attitude information—known as the LIAISON method. Moreover, the Moon’s DRO, noted for its long-term stability [4,5], and the unique dynamical characteristics of the Earth–Moon triangular libration points [6] have both garnered significant scholarly interest [7], prompting focused research efforts. Research includes autonomous orbit determination using inter-satellite ranging between libration point satellites and DRO orbital assets [8], joint BDS-linked tracking of libration-point and DRO constellations [9], and autonomous navigation and time-transfer experiments for DRO–LEO formations [10]. The “Cislunar Space DRO Exploration Research” autonomous navigation project, led and independently implemented for the first time by the Chinese Academy of Sciences, deployed a three-satellite constellation in cislunar space, which established inter-satellite links and networked in August 2024 [11].
Functioning as the spatiotemporal reference framework for cislunar space, the Lunar Space Satellite Navigation System imposes exceptionally stringent requirements on spacecraft orbit determination accuracy, performance, and reliability. The current orbit determination accuracy in cislunar space is generally at the hundred-meter level, while incorporating inter-satellite links can improve the accuracy to the tens of meters [12]. At present, orbital tracking primarily relies on ground-based measurement techniques. However, ground systems are subject to limitations such as Earth occultation interruptions of the ground-to-space link, poor measurement geometry, and insufficient coverage by deep-space tracking networks [13]. Consequently, tracking methods are shifting from terrestrial measurements toward space-based techniques [14]. Space-based measurement methods include inter-satellite ranging and the use of weak signals from onboard GNSS receivers. China’s BeiDou Navigation Satellite System (BDS) experimental satellites, equipped with Ka-band two-way inter-satellite ranging, have demonstrated the feasibility of autonomous orbit determination using such data [15,16]. The in-orbit performance of high-Earth-orbit GNSS receivers is tested on the satellite LT4A. The LT4A is an IGSO satellite located at 89° E with an orbital inclination of 16°, equipped with a high-sensitivity receiver designed to capture BDS B1I and GPS L1 signals. Based on its weak GNSS signals, precision orbit determination is accomplished and could be extended into the cislunar space [17]. The LuGRE program, jointly developed by NASA and the Italian Space Agency [18], installed its payload on the Blue Ghost lunar lander and received GPS signals in March 2025 [19].
Due to limited connectivity and suboptimal communication quality between spacecraft in Earth–Moon space and ground stations or other spacecraft, onboard autonomous orbit determination algorithms typically utilize batch processing approaches. These depend on the planetary ephemerides to compute the positions of the Moon, Sun, and other major planets. Given constraints on onboard processor capacity and storage, the full 20 years of JPL DE ephemeris—approximately 2 MB—would impose excessive storage and communication burdens if uplinked in its entirety. Therefore, it is necessary to develop a suitably simplified ephemeris representation for onboard autonomous orbit determination of Earth–Moon navigation satellites [20,21].
This paper adopts a representative five-satellite navigation constellation, comprising four satellites stationed near the libration points L1, L3, L4, and L5, plus an additional satellite placed in a Distant Retrograde Orbit (DRO). We conduct a detailed accuracy analysis of various ephemeris simplification schemes to identify an optimal approach for Earth–Moon navigation payloads. The selected scheme is then applied to precision orbit determination in both libration point and DRO regimes, using inter-satellite links [22].
2. Cislunar Space Navigation Satellite System and Its Precise Orbit Determination
2.1. Cislunar Lagrange Points and Lunar DRO Orbits
Lagrange points, also known as libration points, are the five distinct solutions to the circular restricted three-body problem. The cislunar Lagrange points represent dynamic equilibrium positions within the cislunar system, forming a unique geometric configuration with the Earth and the Moon. L1, L2, and L3 are referred to as collinear Lagrange points, while L4 and L5 are classified as triangular Lagrange points. These points play a crucial role in the development of cislunar space navigation systems [6]. At the L2 point, China has deployed the Queqiao relay satellite, which facilitates continuous communication between the Earth and the lunar far side. The other Lagrange points offer even more extensive signal coverage across the cislunar space.
The DRO is a planar solution to the circular restricted three-body problem [4]. It is characterized by a prograde orbit around the Earth and a retrograde orbit around the Moon, forming a stable periodic orbit. Theoretically, spacecraft in a DRO can operate for up to 100 years, and by leveraging the asymmetry of the gravitational field, autonomous orbit determination for satellites can be achieved [8]. DRO orbits are distinguished by their long-term stability, low energy requirements for orbit insertion, and the fact that they are situated far from Earth, making them less influenced by the Earth’s space environment [5]. These attributes make DRO orbits highly suitable for deploying navigation satellites and for use as transfer orbits in deep-space exploration missions.
The simulation analysis was performed using the cislunar orbit determination software (Cislunar Orbit Determination, CLOD v1.0), which was independently developed by the Shanghai Astronomical Observatory, Chinese Academy of Sciences. Table 1 presents the key parameters used in the simulation and subsequent precise orbit determination calculations. This section simulates the orbits of cislunar Lagrange points (excluding the L2 point) and DRO spacecraft within the Earth–Moon rotating coordinate system over the period from 1 January 2028 to 31 January 2028, with the L1 orbit simulation period extending from 1 January 2028 to 15 January 2028. The orbits are distinguished using different colors, as depicted in Figure 1. The Earth–Moon rotating coordinate system used in this study has the Earth’s center of mass as the origin, the x-axis directed from the Earth toward the Moon, the z-axis aligned with the instantaneous angular velocity vector of the Earth–Moon rotation, and the y-axis completing a right-handed coordinate system with the x- and z-axes. The coordinates of the Moon are referenced as those at 00:00:00 on 15 January 2028.

Table 1.
Main parameters for cislunar orbit extrapolation simulation calculations.
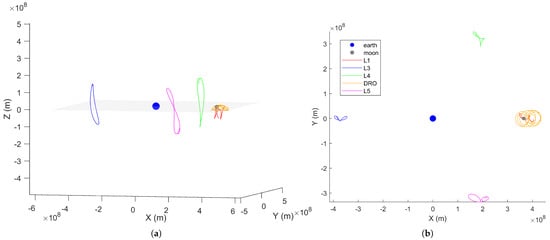
Figure 1.
Schematic diagram of cislunar Lagrange points and DRO spacecraft trajectories. (a): Three-dimensional orbital trajectories in the Earth–Moon rotating coordinate system. (b): Orbital trajectories in the X–Y plane.
The Moon’s trajectory in the Earth–Moon rotating coordinate system is expected to be a straight line; for simplification, it is represented as a point. The top view of the X–Y plane reveals that the DRO orbit exhibits periodic characteristics, appearing as distinct, non-overlapping circles. The L1 orbit displays a trajectory that differs from the other three translational point orbits, manifesting as a series of concentric rings. In contrast, the spacecraft trajectories at the other Lagrange points take the form of an “8”. It is evident that within the Earth–Moon rotating coordinate system, the Lagrange point probes follow a Halo orbit at L3, planar orbits at L4 and L5, and a Near Rectilinear Halo Orbit (NRHO) at L1.
2.2. Cislunar Space Navigation Satellite System
Among the various strategies for constructing a cislunar space navigation satellite system, a prominent approach involves deploying navigation satellites near the Lagrange points in cislunar space, where autonomous orbit determination can be achieved solely through inter-satellite measurements. This approach is referred to as LiAISON (Linked Autonomous Interplanetary Orbit Determination using Satellite-to-Satellite Tracking) navigation [3]. The LiAISON navigation framework requires that at least one spacecraft operate within the asymmetric region of the Earth–Moon three-body gravitational field. Hill quantified the degree of asymmetry within this field, and Huang Y et al. [8] calculated the asymmetry in typical cislunar regions, including areas near the Lagrange points and along Distant Retrograde Orbits (DRO). Their findings indicate that the asymmetry is particularly pronounced near Lagrange points L1 and L2, with DRO orbits also situated in regions exhibiting significant asymmetry within the cislunar three-body gravitational field. Once spacecraft in these regions establish inter-satellite links with other orbital spacecraft, the absolute positions of both ends of the link in the inertial frame can be simultaneously determined, thereby enabling autonomous orbit determination.
In the region around the Lagrange points, full cislunar coverage can be achieved with a relatively small number of navigation satellites. In 2017, Zhang L [23] compared navigation constellations composed of 2 to 4 Lagrange point satellites and analyzed their autonomous operational capabilities. The results indicated that a constellation of four Lagrange point satellites could achieve meter-level autonomous orbit determination accuracy over a 180-day period. In 2024, Zhou H.C. [24] proposed that bounded orbits near the cislunar Lagrange points could provide ideal operational orbits for a cislunar navigation system. Zhou also introduced a typical constellation configuration with satellites deployed at the L3, L4, and L5 points, as well as in lunar orbits (with lunar orbits including the L1 point).
The long-term stability of DROs and their immunity to cislunar occlusion make them an ideal location for deploying cislunar space navigation satellites. In recent years, numerous navigation satellite concepts based on DRO orbits have been proposed by domestic researchers. In 2020, Wang W.B. [10] proposed a study on autonomous navigation and timing for cislunar spacecraft based on a DRO–LEO (Low Earth Orbit) formation. In this scheme, two satellites are deployed—one in a DRO and the other in a near-Earth LEO. High-precision navigation for spacecraft in various cislunar orbits is achieved through inter-satellite links. Considering comprehensive model errors and linking to a 1000 km altitude LEO satellite, the estimated three-dimensional positioning accuracy for the DRO orbit is in the range of tens to several hundred meters. In 2024, Tong Z et al. [14] proposed the deployment of a cislunar space navigation augmentation satellite in lunar orbit around the Moon. Lunar users, by receiving signals leaked from Earth’s GNSS and measurement signals from the lunar navigation augmentation satellite, can obtain navigation information. Simulations show that if the orbit determination accuracy of the DRO-based augmentation satellite is 10 m, the resulting three-dimensional positioning accuracy for users would be approximately 40 m.
The aforementioned studies primarily focus on the deployment of navigation satellites at Lagrange points or lunar DROs, with inter-satellite link navigation serving as the primary method for orbit determination of cislunar space navigation satellites [25]. In the following sections, we will examine navigation satellites deployed at cislunar Lagrange points and lunar DRO orbits, and explore topics related to the precise orbit determination of these satellites and the simplification of planetary ephemerides.
2.3. Precise Orbit Determination
2.3.1. DE Ephemeris Structure
Ephemerides and their computations hold significant practical value in fields such as astrometry, deep space navigation, and other related areas of research. The fundamental approaches for constructing solar system planetary and lunar ephemerides are generally categorized into two types: numerical ephemerides and semi-analytical ephemerides. Numerical ephemerides primarily include the well-known JPL DE/LE series (referred to as the DE ephemerides hereafter), which are widely used internationally [26,27]. This paper will discuss and explore the simplification of ephemerides based on the JPL DE series.
The DE ephemerides can be downloaded in text format from JPL’s FTP server (https://ssd.jpl.nasa.gov/ftp/eph/planets/, accessed on 11 July 2025), available in BSP, ASCII, and Linux file formats. As of now, 29 versions of the ephemerides are available for download. The DE ephemerides are divided into three components: the header file, the data file, and the test file. In the data file, each data block covers a 32-day time span and contains 1018 parameters. The header file of the DE ephemeris contains information such as the data count, ephemeris constants, and data file pointers, all of which can be downloaded from the link provided in this section.
Typically, one segment of the JPL DE ephemeris covers a 32-day period. When incorporating the JPL DE ephemeris data for autonomous orbit determination, if the duration of the required autonomous orbit determination, denoted as t, spans multiple segments, an additional complete ephemeris record must be transmitted [20]. The following discussion will focus on how to mitigate such segmentation issues and enable the flexible transmission of the necessary data within the autonomous orbit determination time interval t.
2.3.2. Perturbation Magnitude Analysis
In precise orbit determination, the positions of major celestial bodies—such as the Moon and the Sun—are computed using the JPL DE ephemeris to assess N-body gravitational perturbations for dynamic orbit determination. In practical orbit determination computations, it is crucial to analyze the influence of N-body perturbations on the accuracy of the orbit determination. Based on the accuracy requirements, certain planetary bodies may be selectively included or excluded from the calculations. This strategy optimizes computational efficiency while ensuring the desired level of precision is maintained.
First, a perturbation magnitude analysis is performed. This analysis generally expresses the magnitude of perturbation as the ratio of the perturbative acceleration to the gravitational acceleration of the central body. This ratio quantifies the degree to which the actual orbit deviates from the ideal two-body orbit due to the influence of perturbative forces.
Based on the relevant perturbation equations, the minimum expression for the perturbation magnitude can be derived as follows [28]:
Here, represents the required accuracy over the prediction arc, n denotes the mean motion (angular velocity), and is the integration time span. The first term is considered only when there is a periodic variation in the semi-major axis, which is caused by non-conservative forces, while the second term applies in cases involving only conservative forces.
Using the above expression to calculate the minimum perturbation magnitude, if , then the perturbative force must be taken into account; otherwise, it can be neglected. In this study, if the perturbation magnitude exerted by a major celestial body on the spacecraft exceeds the minimum threshold, the influence of that body must be included. Conversely, if the perturbation is below this threshold, the influence of that body may be disregarded, facilitating a preliminary simplification of the DE ephemeris.
To theoretically calculate the perturbation magnitudes of the Moon and various major planetary bodies, this study examines the operational conditions of navigation satellites in L3, L4, L5, L1, and DRO orbits. The perturbation magnitudes exerted by the Sun, the Moon, and other major planetary bodies are estimated based on N-body perturbations. Since N-body perturbations are conservative forces, the minimum perturbation magnitude is computed using the second term, with set to 30 days and set to 10 m. The results are presented in the following Table 2.
Table 2.
N-body perturbation magnitudes for the cislunar navigation constellation.
It can be observed that for spacecraft in orbits such as L3, L4, and L5, which are not in close proximity to the Moon, the perturbation magnitudes from the Sun, Moon, Venus, Jupiter, and Saturn all exceed the minimum perturbation magnitude. Meanwhile, the perturbation from Mercury at L3 is comparable to the minimum value and can therefore be neglected. As shown in the table above, to maintain an orbit determination accuracy of 10 m over a 30-day period, deep-space spacecraft need only account for the perturbations from the Sun, Moon, Venus, Jupiter, and Saturn.
For spacecraft near the Moon in L1 and DRO orbits, the perturbation magnitudes from the Sun, Moon, Venus, and Jupiter also exceed the minimum threshold. Consequently, to achieve a 10 m orbit determination accuracy over a 30-day period, near-Moon spacecraft similarly need to consider only the perturbations from the Sun, Moon, Venus, and Jupiter.
In the study of the perturbative effects of various celestial bodies in an autonomous orbit determination environment, this section first employs the CLOD v1.0 software to perform a 30-day orbital extrapolation of the cislunar space navigation constellation spacecraft, commencing on 1 January 2028. The gravitational influences of each celestial body on the orbital prediction accuracy of the cislunar translational point probes are analyzed, forming the foundation for subsequent discussions on the selection of celestial bodies in the DE ephemeris and the exclusion of major planetary components with negligible effects.
First, the N-body gravitational effects of the celestial bodies included in the JPL DE436 ephemeris (excluding the nutation and planetary motion terms) are computed, and a 30-day orbital extrapolation is carried out. This extrapolation serves as the reference orbit. Subsequently, the gravitational influences of the Sun, Moon, and major planets such as Jupiter, Venus, and Saturn are considered incrementally. Orbital extrapolations are performed for durations of 5, 10, 15, 20, 25, and 30 days, and the resulting three-dimensional positions are compared to those of the reference orbit. The reference orbit incorporates all major celestial bodies from the JPL DE ephemeris, while other non-N-body perturbation parameters remain consistent with those used in the experiment. The resulting orbit determination accuracy is then represented using different colors corresponding to the various extrapolation intervals, thereby illustrating the impact of different celestial bodies and extrapolation durations on the forecast accuracy.
Since the theoretical perturbation magnitude calculations yield similar results for L3, L4, and L5 while the L1 and lunar DRO orbits are closer to the Moon and subject to significant lunar perturbations, and because the perturbative effects of various celestial bodies on navigation satellites at these positions exhibit distinct characteristics compared to those at the other three Lagrange points, the simulation process combines these three results and averages their impacts, as shown in Figure 2.
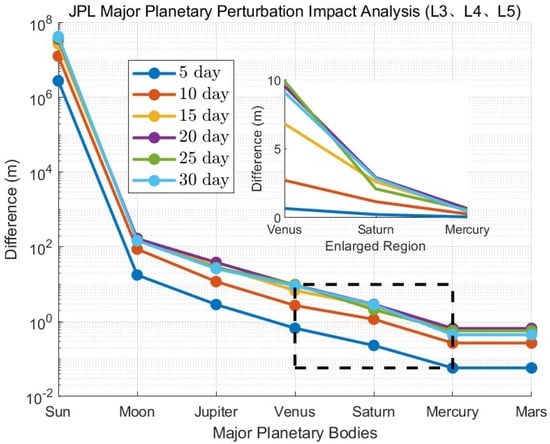
Figure 2.
JPL Major planetary perturbation impact analysis (L3, L4, L5).
It can be observed that, after accounting for the perturbations from the Sun, Moon, Jupiter, and Venus, the 30-day orbital extrapolation error for the navigation satellites at these three Lagrange points is approximately 10 m. When the perturbative effect of Saturn is additionally considered, the error is reduced to within 10 m, which aligns with the previously calculated perturbation magnitude results.
A statistical error analysis between the spacecraft at the L1 Lagrange point and the reference orbit is presented in Figure 3. For a 15-day orbital extrapolation, including Venus results in an extrapolation error within 10 m, which is consistent with the theoretical perturbation magnitude analysis. However, for extrapolations exceeding 15 days, the error increases to within 700 m when Venus is considered, and the L1 orbit extrapolation begins to diverge beyond 15 days. These discrepancies may be attributed to the unique position of the L1 point or to the integration method employed. The CLOD v1.0 software used in this study utilizes an RKF7 (8) integrator with fixed step-size integration; it is possible that a variable step-size integrator may be required for accurate modeling at the L1 point.
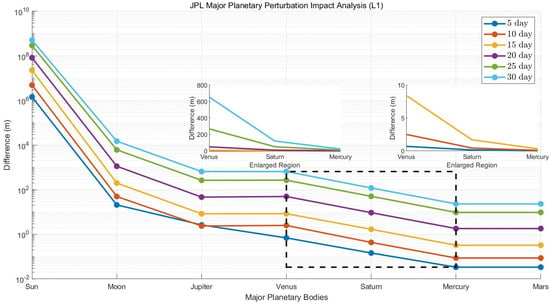
Figure 3.
JPL major planetary perturbation impact analysis (L1).
A statistical error analysis was performed for the spacecraft on the lunar DRO orbit relative to the reference orbit, with the results shown in Figure 4. After incorporating Venus, the 30-day orbital extrapolation accuracy is within 2 m, which is consistent with the theoretical calculations.
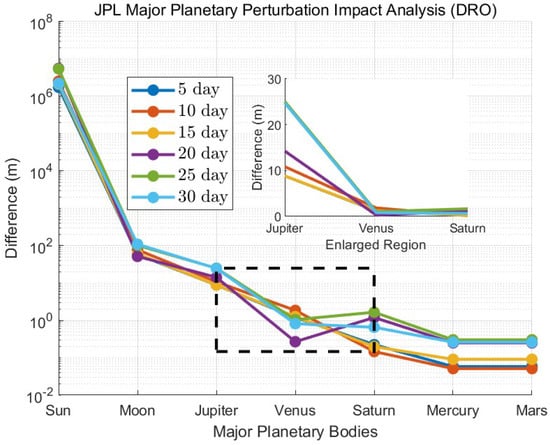
Figure 4.
JPL major planetary perturbation impact analysis (DRO).
The following can generally be observed:
- Neglecting either the Sun or the Moon would significantly impact orbit determination accuracy, particularly the neglect of the Moon. The N-body gravitational forces of both the Sun and the Moon must be accounted for with sufficient precision.
- It is observed that, except for the L1 orbit, for other spacecraft, the overall extrapolation accuracy can be maintained within 2 m after considering Saturn. Therefore, to ensure that the orbit extrapolation accuracy of cislunar spacecraft remains at the meter level over 30 days, the N-body perturbations in cislunar space need only consider the following five bodies: the Moon, the Sun, Venus, Saturn, and Jupiter. For spacecraft in the L1 orbit, within a 15-day extrapolation, only the perturbations from these five bodies need to be considered. The perturbations from other major planetary bodies can be excluded from the ephemeris. After removing these, the number of parameters for these five bodies in the JPL ephemeris is 483; including the starting and ending Julian days results in a total of 485 parameters. This represents a reduction of approximately 52% compared to the original 1018 parameters in the JPL ephemeris, resulting in a significant decrease in storage requirements.
3. JPL DE Ephemeris Simplification Scheme
3.1. Lagrange and Hermite Interpolation Methods
Given distinct data points (), the Lagrange interpolating polynomial of degree n satisfies for all i. It is expressed as [29]:
Given nodes with both function values and derivative values , the Hermite interpolant is a polynomial of degree that satisfies:
Both Lagrange interpolation and Hermite interpolation methods can be employed to simplify the JPL DE ephemeris, thereby reducing memory usage while maintaining a certain level of accuracy. Both methods are capable of achieving an accuracy comparable to the original ephemeris while ensuring low memory requirements. However, high-order Lagrange interpolation may suffer from numerical instability, whereas Hermite interpolation, which matches both the function value and its first derivative at each sample point, provides a smoother and more continuous interpolation function. This characteristic improves interpolation efficiency in practical applications. Therefore, this study ultimately selects Hermite interpolation as the preferred method to achieve high precision while maintaining interpolation efficiency.
3.2. DE Ephemeris Simplification Scheme
Clearly, based on the previous discussion, we conclude that the ephemeris simplification scheme should primarily focus on the Moon and the Sun. In this section, the DE 436 ephemeris is used as the baseline. Over a 32-day period, the Moon requires 312 Chebyshev coefficients, and the Sun requires 66 Chebyshev interpolation coefficients. Given the limitations of onboard memory, simplifying the original ephemeris can significantly reduce memory usage. This section will discuss the simplification process, with the following steps:
- Using the precise original ephemeris (such as the DE 436 ephemeris used by the CLOD v1.0 software in this study), a set of equally spaced solar and lunar coordinate nodes (or velocities) is calculated.
- The solar and lunar coordinate nodes (or velocities) are encoded and transmitted to the cislunar space navigation satellites, which then compute the positions of the Sun and Moon onboard. One specific calculation method is considered: the Hermite interpolation method, which requires both the coordinate nodes and the corresponding velocities. Compared to Chebyshev interpolation, Hermite interpolation methods reduce the number of coefficients, thus simplifying the ephemeris.
The parameter counts in Table 3 represent the total number of parameters required for a 32-day time span. For Hermite interpolation, each sampling point requires six parameters (position and velocity vectors). Table 3 outlines the orders and number of nodes for the simplified schemes using the Hermite interpolation method for the Moon, categorized into six schemes. Using the highly accurate DE 436 ephemeris as a reference, these six schemes require a maximum of parameters over a 32-day period, which represents a 38% reduction compared to the original 312 parameters. In the minimal case, only 48 parameters are needed, corresponding to an 84% reduction. If segmentation occurs, the reduction in the number of parameters will be even more significant. For Lunar Interpolation Scheme 3, since it adopts a 3-day sampling interval (which is not an integer divisor of 32 days), the parameter calculation for the 32-day period requires rounding up to the nearest periodic multiple (32 d→33 d). The total number of parameters is calculated as parameters.
Table 3.
Hermite Interpolation Simplification Schemes for Lunar and Solar Positions.
Table 3 also provides a detailed description of the solar simplification schemes using the Hermite interpolation method, categorized into the following six schemes. For Hermite interpolation, the orders are 5, 4, and 3, with time intervals of 5 days, 10 days, and 15 days, respectively. The original solar ephemeris for a 32-day period contains 66 parameters, and the six schemes presented here result in a significantly reduced number of parameters compared to the original 66.
These results are compared with the lunar position obtained using Chebyshev interpolation coefficients from the original JPL DE ephemeris over a 365-day time span, as presented in Table 4. It can be observed that the error in calculating the lunar position with the simplified ephemeris depends on both the interpolation time interval and the interpolation order. For a given time interval, a higher interpolation order results in greater accuracy. Additionally, a shorter time interval leads to higher interpolation precision. For solar position interpolation, as the interpolation order increases, the errors generally decrease significantly. The shorter the time interval, the higher the interpolation accuracy. as the time interval decreases from 15 days to 5 days, the interpolation accuracy improves significantly, and the errors decrease.
Table 4.
Three-dimensional error of solar position interpolation over 365 days under different schemes and methods.
The error in solar and moon position interpolation is primarily influenced by the interpolation order and time interval. Selecting an appropriate time interval and interpolation order can substantially enhance the accuracy. Selecting the appropriate interpolation method and parameters (such as time interval and order) is essential for precise orbital calculations in the cislunar space environment.
3.3. The Impact of Simplified Ephemerides on the Long-Term Position Predictions of Cislunar Space Navigation Satellites
In this study, the Hermite interpolation method is employed to compute the positions of the Moon and the Sun. The positional and velocity data are obtained from the JPL DE436 ephemeris. The interpolation orders are set as follows: 5-order Hermite interpolation for the Moon and 3-order Hermite interpolation for the Sun. The reference is the extrapolated integrated orbit with N-body perturbations, reading all celestial bodies from JPL DE436 ephemeris, excluding nutation and libration. The experiment only varies the N-body perturbation objects and interpolation methods, considering solely the gravitational influences of the Moon, Sun, Venus, Jupiter, and Saturn. To assess the interpolation performance under different temporal resolutions, four schemes were designed as shown in Table 5.
Table 5.
Sampling schemes and data compression ratios.
Interpolation schemes with different time steps (Moon/Sun) are tabulated, including parameter counts and their 32-day ephemeris percentages. Solar parameters are calculated over 30 days for the 5/10-day intervals. The integration was performed with a 600 s time step using the RKF7 (8) integrator over the time span from 1 January 2028 to 7 January 2028. Maximum 6-day position errors relative to reference orbits are presented in Table 6 and Table 7.
Table 6.
Maximum 6-day position prediction errors for different spacecraft under varying sampling configurations (unit: m).
Table 7.
Maximum 6-day position prediction errors for different spacecraft under varying sampling configurations (unit: m).
The variation in solar interpolation time intervals has minimal impact on position prediction errors for all five spacecraft.
Analysis of prediction results reveals that the three spacecraft farther from the Moon (L3, L4, and L5) show minimal sensitivity to variations in lunar position interpolation intervals. Their maximum position errors remain virtually unchanged across all four interpolation schemes, with overall errors consistently below 0.6 m. In contrast, lunar-proximal spacecraft like DRO and L1 demonstrate significantly greater sensitivity to lunar interpolation intervals. When the interpolation interval increases, their maximum position errors increase substantially by one order of magnitude.
4. Simplified Ephemeris Applied to Inter-Satellite Link Orbit Determination Analysis in Cislunar
Inter-Satellite Link (ISL) refers to direct communication connections established between satellites without the need for ground stations, effectively reducing reliance on ground-based tracking and control resources [22]. The inter-satellite ranging simulation is set up for four Lagrangian point navigation satellites and the Moon’s distant retrograde orbit navigation satellites. The inter-satellite link employs a bi-directional one-way method, where each navigation satellite receives ranging signals from another navigation satellite. If the Moon or Earth causes an obstruction, the link is considered interrupted, and the link is re-established once observation conditions are restored. The precise orbit determination arc length is 6 days, with a start time of 1 January 2028. Both the original DE 436 ephemeris and the simplified ephemeris are processed synchronously, and the results are compared by computing the differences with the simulation reference orbit, followed by further analysis.
The inter-satellite links do not introduce systematic errors or random errors in order to better distinguish the impact of JPL DE ephemeris simplification on orbit determination accuracy. The maximum errors between the simulated precision orbits and those computed using the simplified JPL DE ephemeris for N-body perturbation orbit determination were compared. The simplification scheme was identical to Table 5, with the comparison results shown in Figure 5.
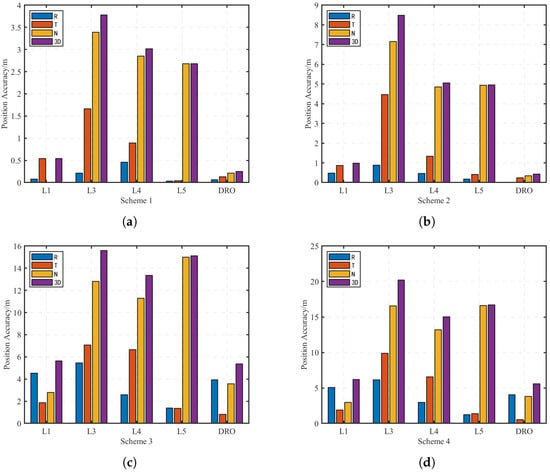
Figure 5.
Maximum error between orbit-determined ephemeris and simulated reference orbit: (a): Scheme 1. (b): Scheme 2. (c): Scheme 3. (d): Scheme 4.
The simulation results demonstrate that among the four schemes evaluated over the 6-day orbit determination arc, Scheme 1 yields optimal performance with all five satellites maintaining three-dimensional maximum position errors below 4 m. In contrast, Scheme 4 shows inferior accuracy, particularly for the L3 navigation satellite, which exhibits the largest maximum 3D error of up to 20.5 m.
A comparative analysis reveals that the maximum 3D orbit determination errors for L3, L4, and L5 satellites are approximately one order of magnitude greater than those of L1 and DRO orbit satellites. This discrepancy stems from the significantly higher orbital asymmetry characteristics in the L1 and DRO orbital regimes [8]. The results confirm that simplified ephemeris schemes can effectively maintain orbit determination accuracy in regions with strong orbital asymmetry.
While the simplified ephemeris results in long-term prediction accuracy loss due to parameter reduction, it remains a viable option if lower accuracy requirements are acceptable.
5. Conclusions
This paper proposes a method for simplifying the DE ephemerides, tailored for autonomous orbit determination algorithms of cislunar space navigation satellites. The analysis focuses on the conditions under which a lunar navigation system, operating at the Lagrange points and DRO orbits, must meet specific precision requirements. The calculation of N-body perturbations necessitates considering the influence of major planetary bodies. Several simulation schemes are presented to assess the interpolation accuracy of the Moon and the Sun, with appropriate interpolation methods, orders, and time intervals selected. The analysis also evaluates the precision loss in orbit propagation and the use of simplified ephemerides for precise orbit determination under inter-satellite links.
The findings indicate that in cislunar space, maintaining a precision of 10 m over 30 days requires accounting for only five major planetary bodies: the Sun, Moon, Venus, Jupiter, and Saturn. Special attention should be given to the precision of the Sun and Moon positions, and subsequent ephemeris simplifications should focus primarily on these bodies. The Hermite interpolation method is recommended, with a 1–2 day interpolation time interval for the Moon using 5th-order interpolation, and a 5–10 day interval for the Sun using 3rd-order interpolation. The orbital extrapolation results show that orbits near the Moon, such as the DRO and L1 orbits, are highly sensitive to the Moon’s position, and thus the interpolation time interval should be set to 1 day. Conversely, L3, L4, and L5 orbits are more sensitive to the Sun’s position, and a 5-day interpolation interval is advised. Under the inter-satellite link precise orbit determination, with the simplified scheme using 5th-order interpolation for the Moon and a 1-day interval, and 3rd-order interpolation for the Sun with a 5-day interval, the maximum precision loss for a single satellite is at the meter level. Furthermore, memory usage is reduced by 60% compared to the original ephemerides.
This study primarily focuses on the interpolation methods for the Sun and Moon. Given that the number of parameters for Venus in the JPL DE ephemerides is similar to that of the Sun, Venus can also be simplified using the same method, resulting in further memory savings.
Author Contributions
Conceptualization, N.X.; methodology, H.L. and N.X.; software, P.L.; validation, H.L.; formal analysis, H.L.; investigation, H.L.; resources, N.X. and P.L.; data curation, H.L.; writing—original draft preparation, H.L.; writing—review and editing, N.X., Y.H. and P.L.; visualization, H.L.; supervision, N.X. and Y.H.; project administration, H.L.; funding acquisition, N.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Strategic Priority Research Program of Chinese Academy of Sciences (Grant No. XDA30040500) and the Preresearch Project on Civil Aerospace Technologies of China National Space Administration (Grant No. D010105).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhou, C.G.; Zhang, R.Y.; Yang, C.H. Design of circumlunar global positioning satellite constellation on DRO in the cislunar space. Syst. Eng. Electron. 2024, 46, 4173–4182. (In Chinese) [Google Scholar] [CrossRef]
- Duan, J.F.; Zhang, Y.; Cao, J.F.; Chen, L.; Chen, M.; Xie, J. A summary of orbit determination technology for Chinese Lunar exploration project. J. Deep Space Explor. 2019, 6, 203–209. (In Chinese) [Google Scholar] [CrossRef]
- Hill, K.A. Autonomous Navigation in Libration Point Orbits. Ph.D. Thesis, University of Colorado Boulder, Boulder, CO, USA, 2007. [Google Scholar]
- Murakami, N.; Yamanaka, K. Trajectory Design for Rendezvous in Lunar Distant Retrograde Orbit. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; IEEE Press: Piscataway, NJ, USA, 2015; pp. 1–13. [Google Scholar]
- Huang, Y.D.; Huang, Y.; Fan, M.; Li, P. Analysis of cislunar dro orbit determination accuracy using Earth-based simulated observations. J. Deep Space Explor. (Chin. Engl.) 2024, 11, 405–413. (In Chinese) [Google Scholar] [CrossRef]
- Liu, B.; Hou, X.Y.; Tang, J.S.; Liu, L. Autonomous orbit determination of satellites around triangular libration points in the Earth-Moon system. J. Spacecr. TT C Technol. 2017, 36, 56–66. (In Chinese) [Google Scholar]
- Meng, Y.H.; Chen, Q.F. Outline design and performance analysis of navigation constellation near earth-moon libration point. Acta Phys. Sin. 2014, 63, 248402-1–248402-11. (In Chinese) [Google Scholar] [CrossRef]
- Huang, Y.; Yang, P.; Chen, Y.L.; Li, P.J.; Zhou, S.S.; Tang, C.P.; Hu, X.G. Orbit determination of a cislunar space probe using Inter-Satellite Link data. Sci. Sin. (Phys. Mech. Astron.) 2023, 53, 132–144. (In Chinese) [Google Scholar]
- Xu, Z.; Shao, K.; Gu, D.; Tong, L.; Du, L.; Wei, C.; An, Z.; Zhu, J. Orbit determination of Earth-Moon libration point navigation constellation based on Inter-satellite links. Adv. Space Res. 2024, 74, 937–948. [Google Scholar] [CrossRef]
- Wang, W.B. Autonomous Navigation and Timing in Cislunar Space Enabled by DRO-LE0 Fommation. Ph.D. Thesis, University of Chinese Academy of Sciences, Being, China, 2020. (In Chinese). [Google Scholar]
- Gan, X. China establishes a three-satellite constellation in Earth–Moon space. China Science Daily, 17 April 2025. (In Chinese) [Google Scholar]
- Xu, Z.Y.; Gu, D.F.; Du, L.; Shi, C.L.; Tong, L.S. A review of Cislunar space navigation technology. Navig. Position. Timing 2025, 12, 1–13. (In Chinese) [Google Scholar] [CrossRef]
- Wu, W.R.; Li, H.T.; Li, Z.; Wang, G.L.; Tang, Y.H. Status and prospect of China’s deep space TT&C network. Sci. Sin. Inform. 2020, 50, 87–108. (In Chinese) [Google Scholar] [CrossRef]
- Tong, Z.; Zhu, X.; Chen, S.; Xu, J.; Meng, Y. Cislunar Navigation Method Based on Earth GNSS and Navigation Augmentation Satellites. Chin. Space Sci. Technol. (Chin. Engl.) 2024, 44, 69–79. (In Chinese) [Google Scholar] [CrossRef]
- Tang, C.; Hu, X.; Zhou, S.; Liu, L.; Pan, J.; Chen, L.; Guo, R.; Zhu, L.; Hu, G.; Li, X.; et al. Initial results of centralized autonomous orbit determination of the new-generation BDS satellites with inter-satellite link measurements. J. Geod. 2018, 92, 1155–1169. [Google Scholar] [CrossRef]
- Yang, J.; Hu, X.; Zhou, W.; Zhou, S.; Tang, C.; Song, Y.; Liu, L.; Yang, Y.; Tian, Q.; Liu, J.; et al. Relativistic effects in BDS-3 high-accuracy intersatellite time synchronization. Adv. Space Res. 2023, 71, 4091–4103. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, P.; Wang, Z.; Huang, Y.; Cao, J.; Chen, Y.; Cheng, Z.; Dong, W.; Hu, X. GPS/BDS signal analysis and precise orbit determination of the Inclined Geo-Synchronous Orbit satellite LT4A. Measurement 2025, 245, 116592. [Google Scholar] [CrossRef]
- Israel, D.J.; Mauldin, K.D.; Roberts, C.J.; Mitchell, J.W.; Pulkkinen, A.A.; Cooper, L.V.D.; Johnson, M.A.; Christe, S.D.; Gramling, C.J. LunaNet: A Flexible and Extensible Lunar Exploration Communications and Navigation Infrastructure. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; IEEE: New York, NY, USA, 2020; pp. 1–14. [Google Scholar]
- NASA. NASA Successfully Acquires GPS Signals on Moon [EB/OL]. Available online: https://www.nasa.gov/directorates/somd/space-communications-navigation-program/nasa-successfully-acquires-gps-signals-on-moon/ (accessed on 4 March 2025).
- Wang, F.H.; Zhang, W.; Gong, X.W. Simplifed Usage of JPL DE in Auto-OD of Navigation Constellation. J. Geomat. Sci. Technol. 2015, 32, 1–6+12. (In Chinese) [Google Scholar] [CrossRef]
- Wang, F.H.; Gong, X.W.; Xu, Q.C.; Zhang, W. Simplification of Jpl’s de and Its Application on Autonomous Orbit Determination of Global Navigation Constellation. Geod. Earth Dyn. 2013, 33, 107–111. (In Chinese) [Google Scholar] [CrossRef]
- Cao, J.F.; Man, H.J.; Wang, W.B.; Wang, J.; Liu, S.; Ju, B.; Zhang, Y. A Simulation Study of Orbit Determination Capability for Cislunar Space Probes Using ISL, Data. Geomat. Inf. Sci. Wuhan Univ. 2025, 50, 637–646. [Google Scholar] [CrossRef]
- Zhang, L. Design of the Earth-Moon Libration Point Navigation Satellite Constellation and Navigation Performance Analysis. Ph.D. Thesis, Nanjing University, Nanjing, China, 2017. (In Chinese). [Google Scholar]
- Zhou, H.C.; Zheng, J.J.; Wang, H.H.; Bi, S. Construction and transfer of space-based spatial-temporal reference in earth-moon space. Chin. Space Sci. Technol. 2024, 44, 51–59. (In Chinese) [Google Scholar] [CrossRef]
- Wang, S. Research on Development of Foreign Cislunar Space Communication and Navigation service systems. Spacecr. Eng. 2024, 33, 88–94. (In Chinese) [Google Scholar]
- Lei, W.W.; Li, K.; Zhang, H.W. Structure, calculation and comparison of development ephemerides. J. Spacecr. TT C Technol. 2016, 35, 375–384. (In Chinese) [Google Scholar]
- Liu, W.Y.; Zou, X.C.; Zhong, L.P. Development and Comparison of JPL planetary ephemerides. J. Geod. Geodyn. 2022, 42, 925–930. (In Chinese) [Google Scholar] [CrossRef]
- Wang, X.Y.; Hu, X.G.; Jiang, H.; Zhao, Q.H. The Precise Orbit Determination Technology of GNSS Satellites; Science Press: Beijing, China, 2017; p. P-3391.01. (In Chinese) [Google Scholar]
- Xu, C.W.; Sun, S.W. Introduction to Numerical Computational Methods, 4th ed.; Higher Education Press: Beijing, China, 2015. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).