
Development of a Novel Deployable Solar Panel and Mechanism for 6U CubeSat of STEP Cube Lab-II



Abstract
:1. Introduction
2. The STEP Cube Lab-II CubeSat’s Overview
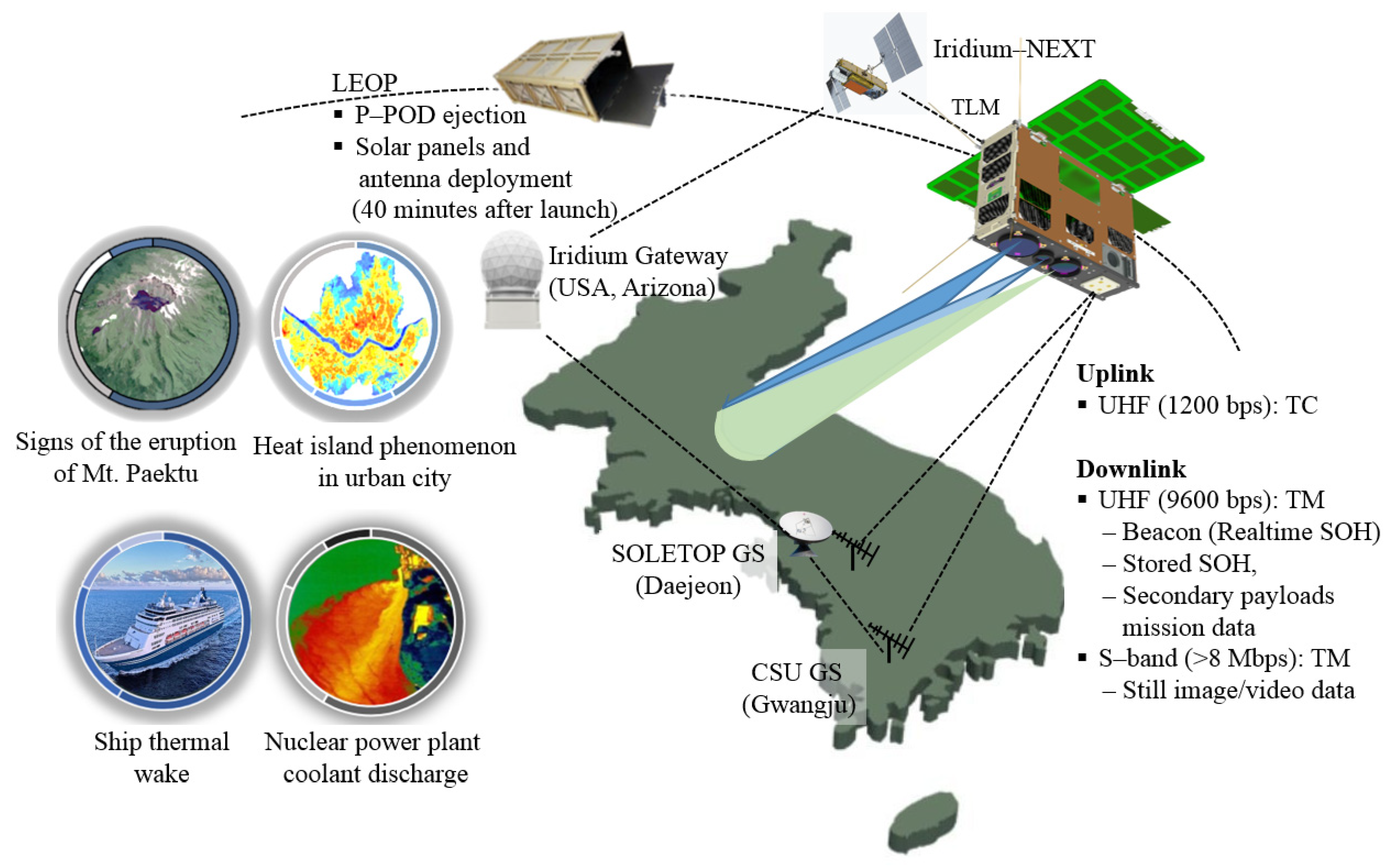
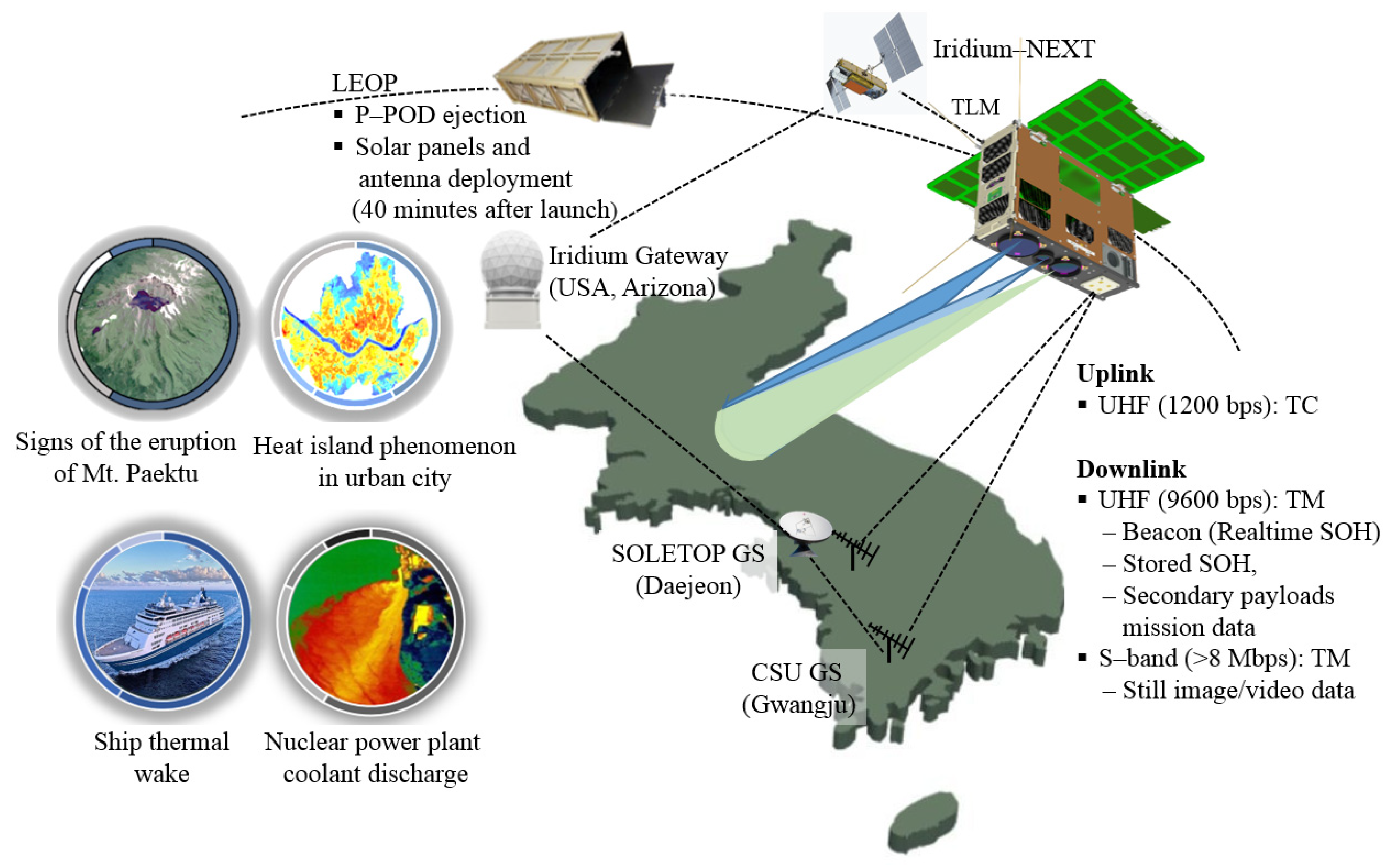
2.1. Mission Objectives and System Descriptions
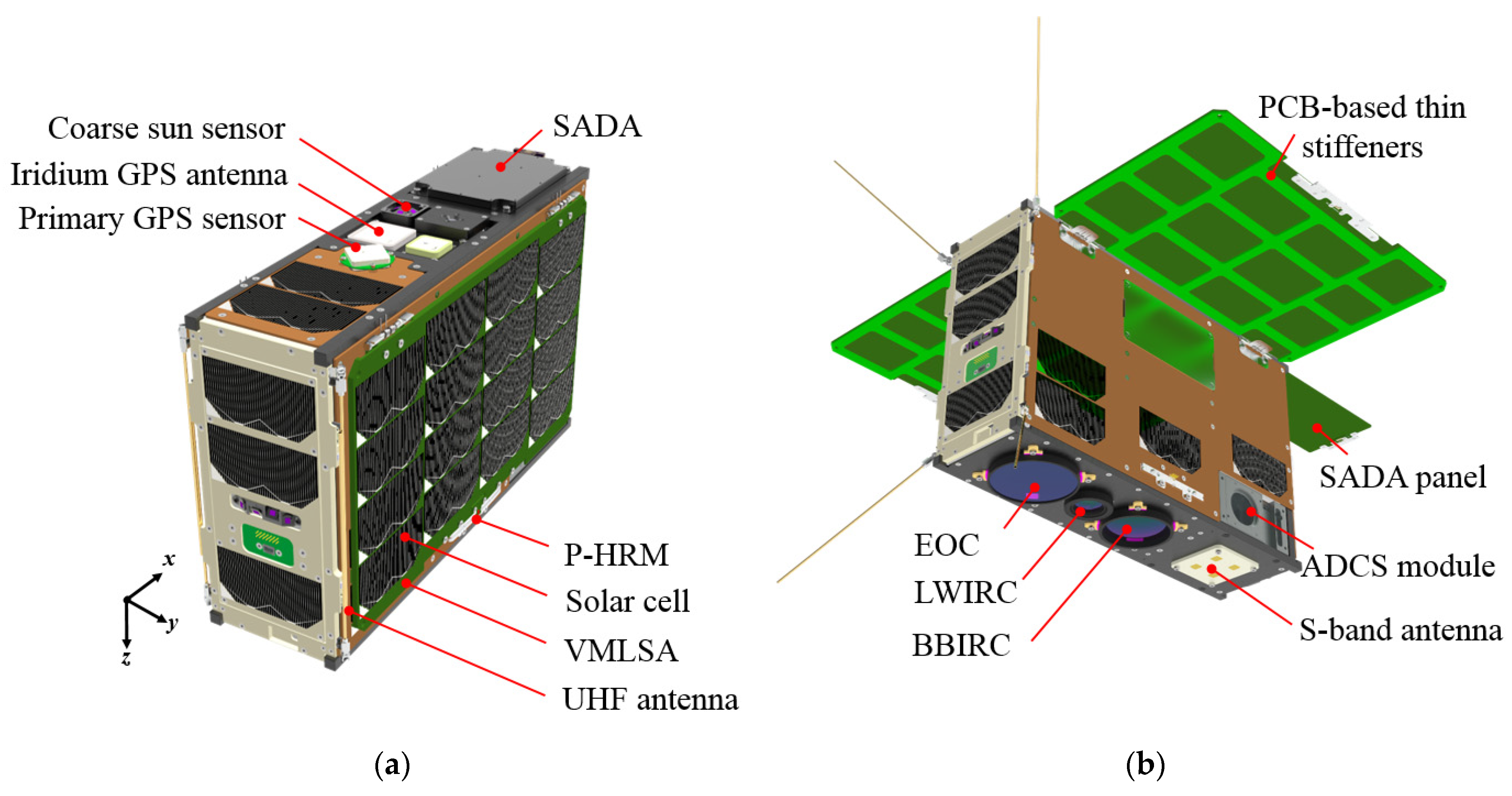
2.2. Satellite’s Configuration and Design Descriptions
2.3. Design of Solar Panel Module with the Accommodation of Solar Cell
3. A PCB-Based High-Damping Deployable Solar Panel Module
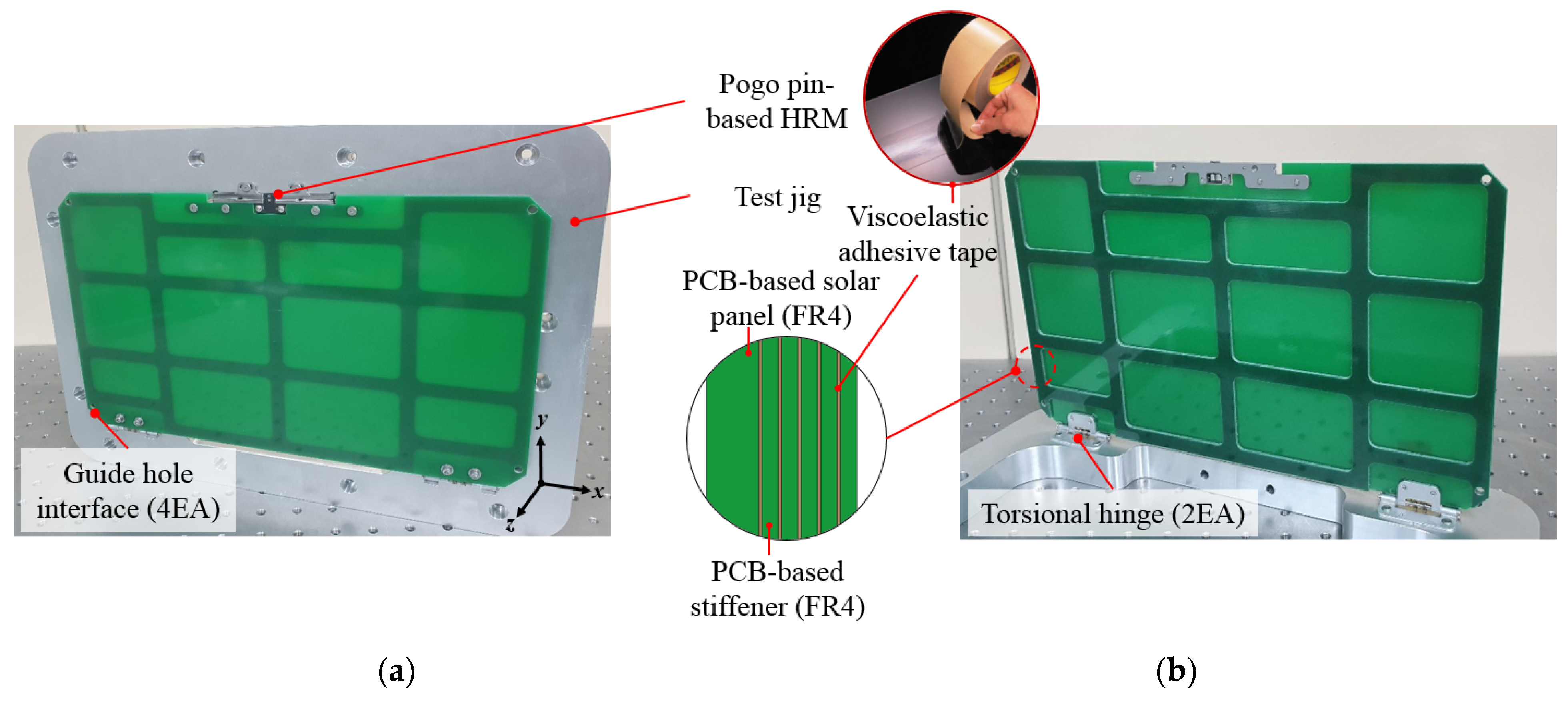
3.1. Design Description
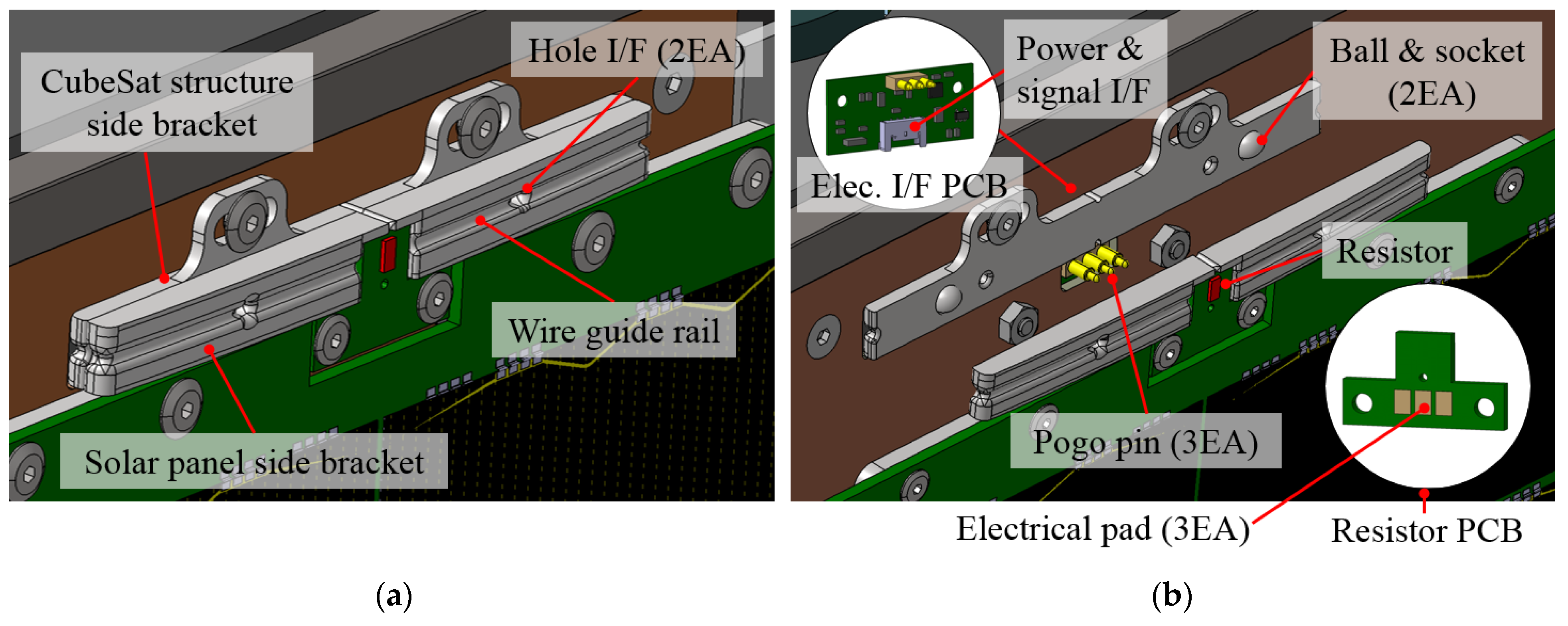
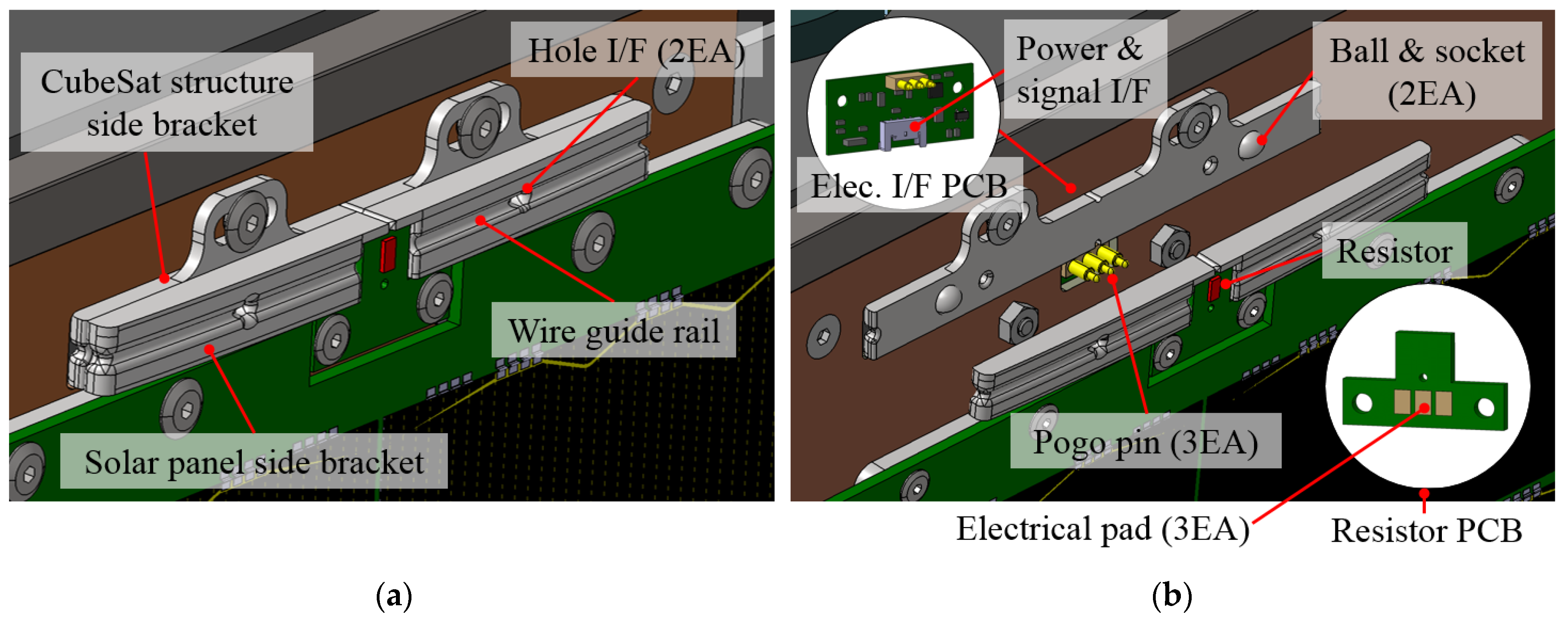
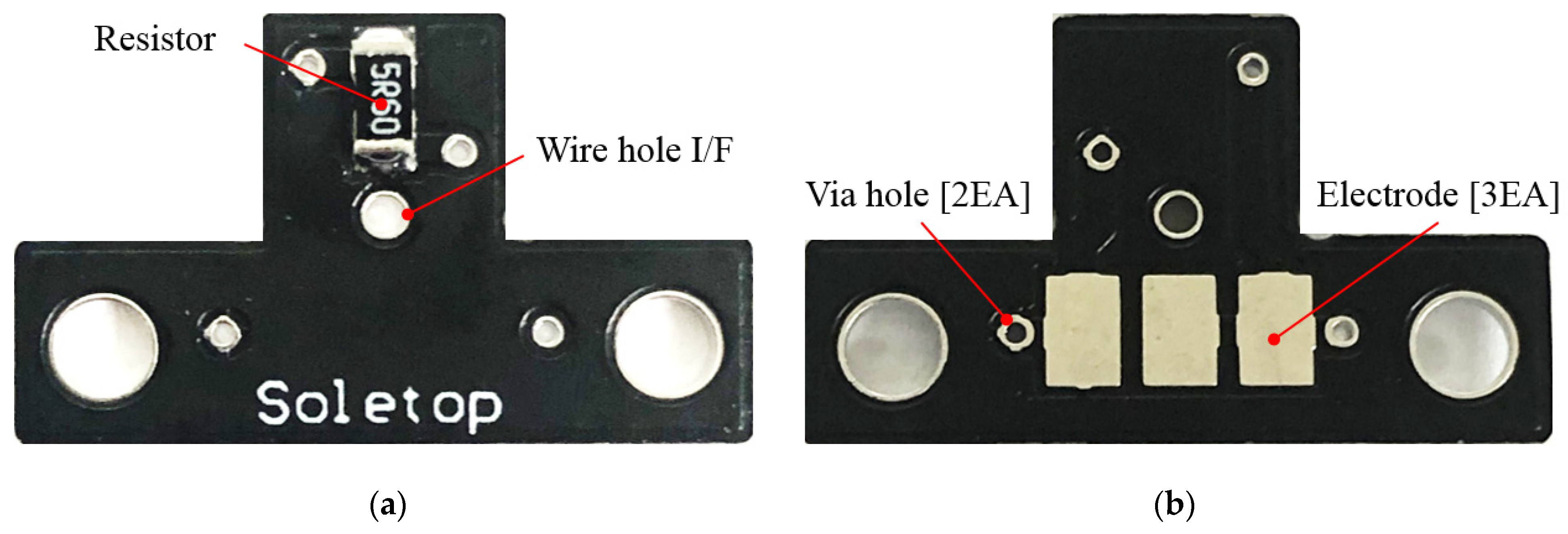
3.2. Solar Panel Holding and Release Mechanism
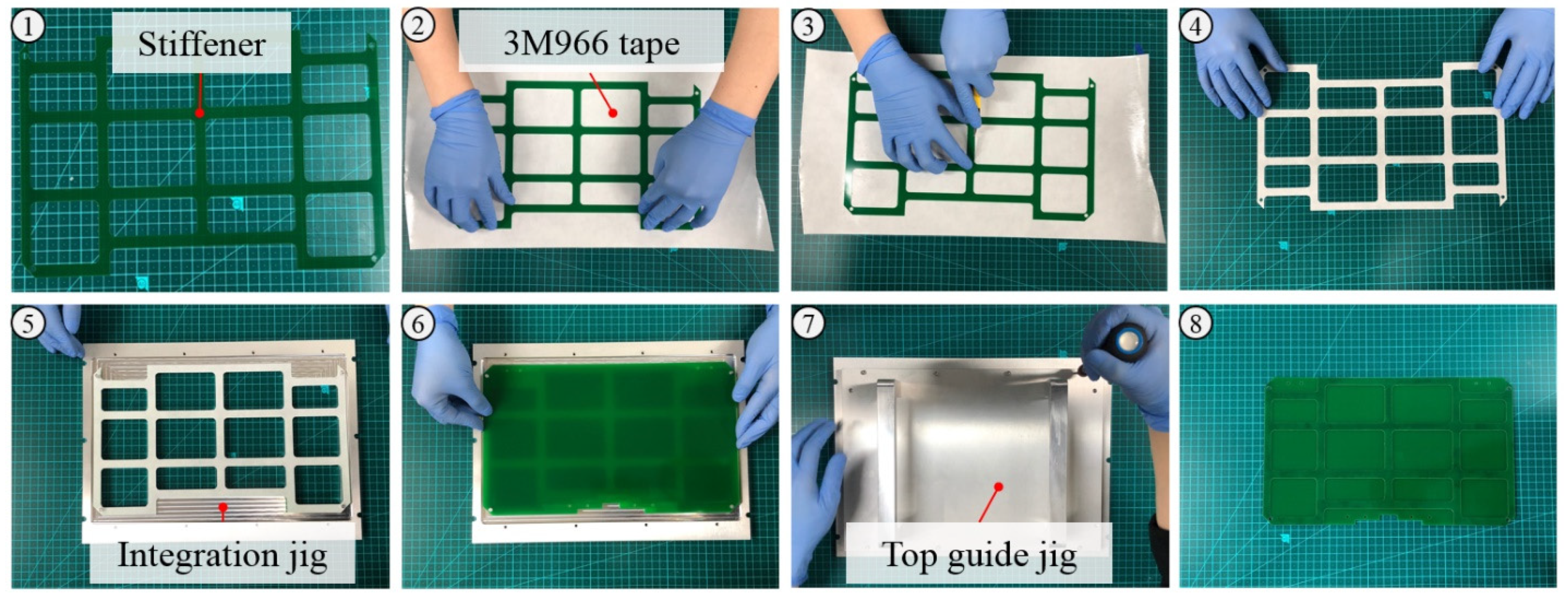
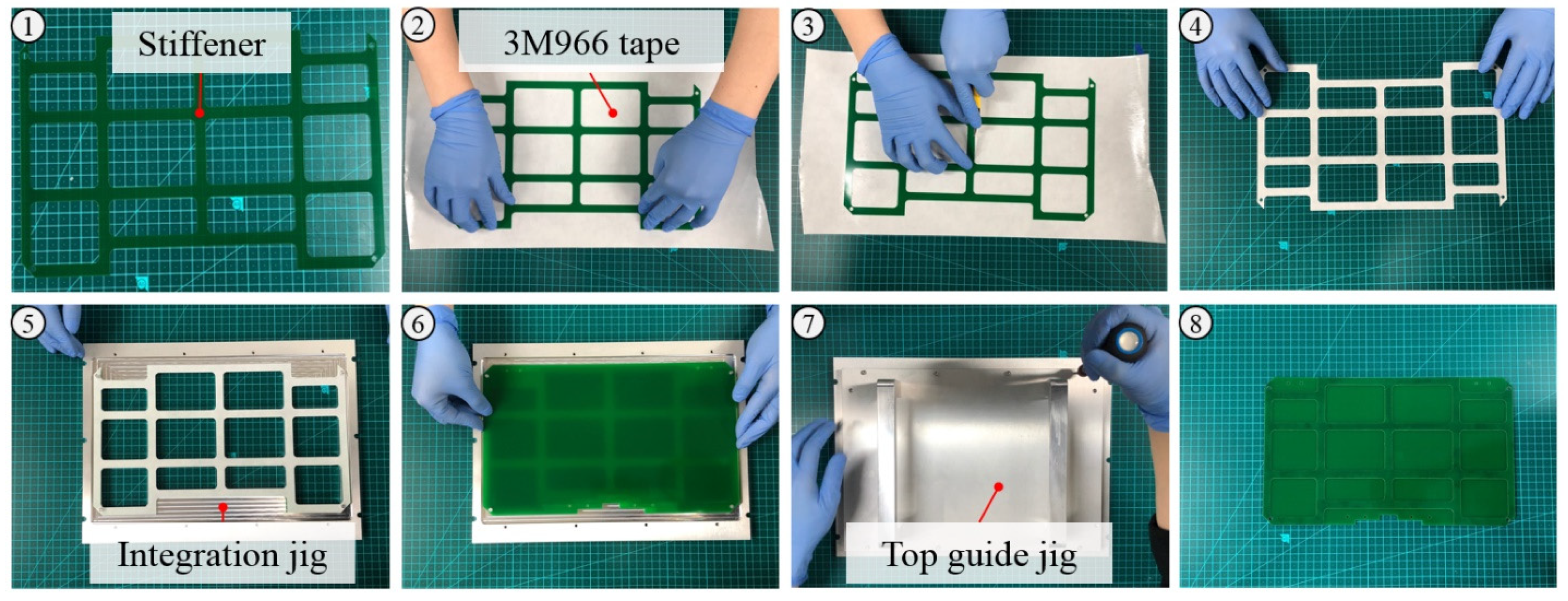
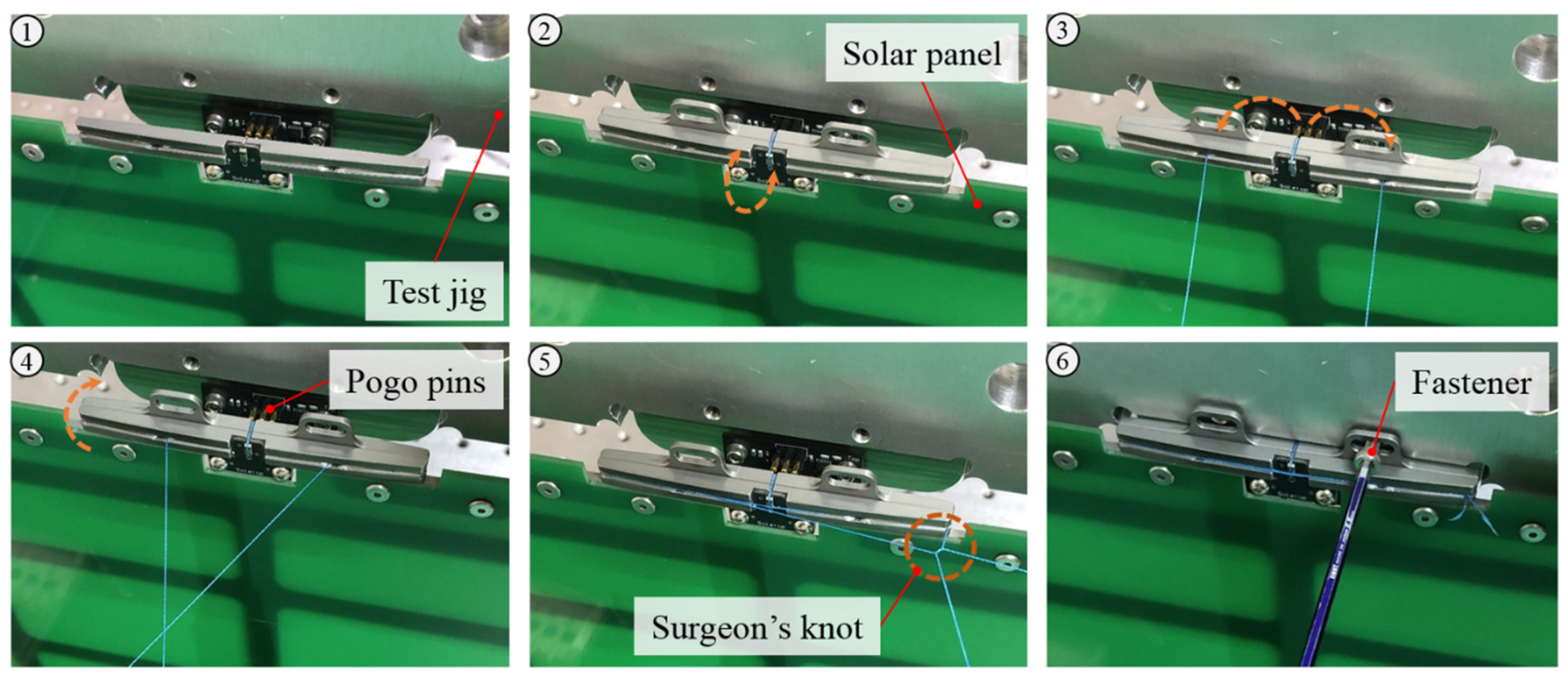
3.3. Wire-Tightening Process
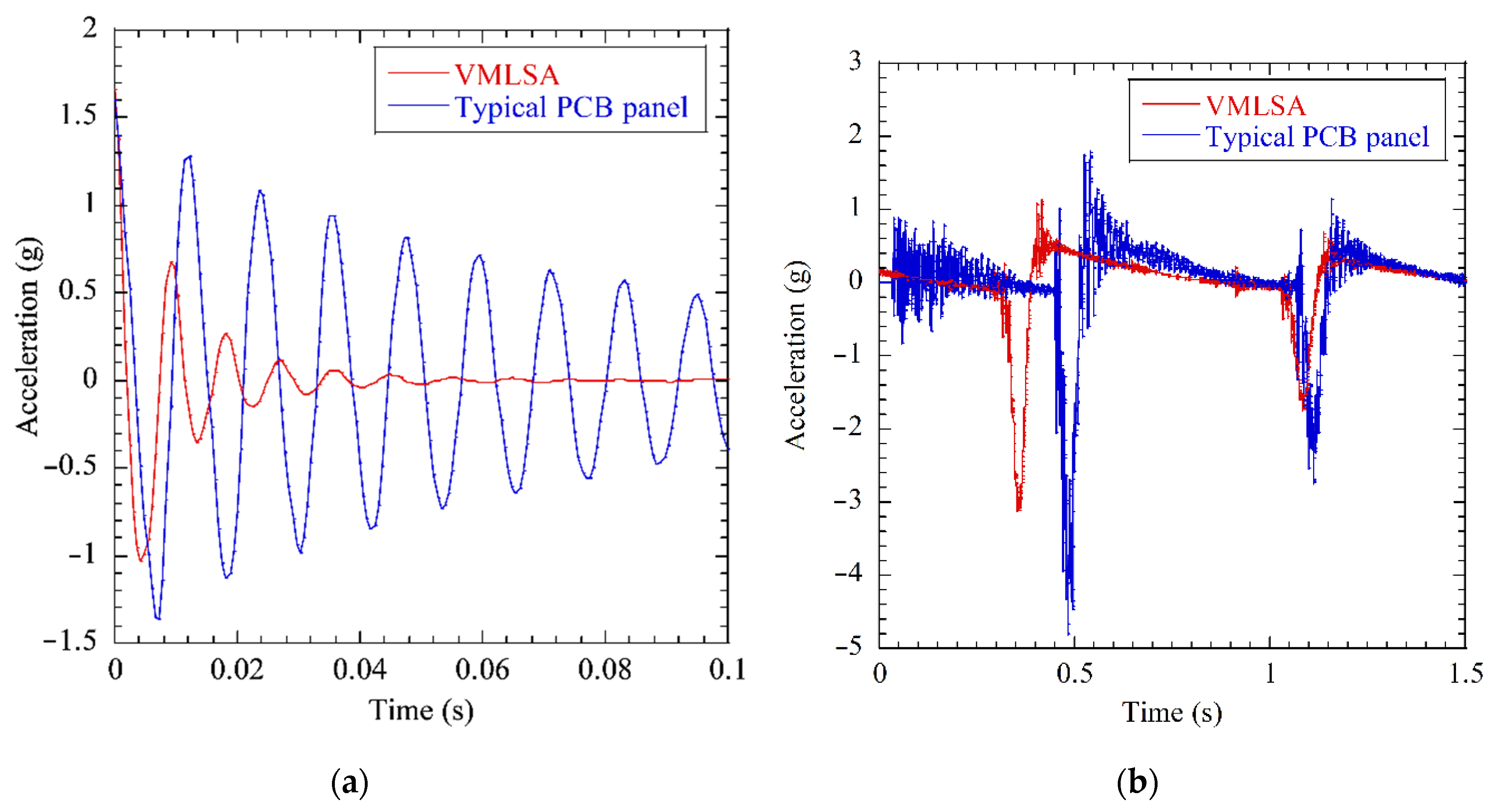
4. Dynamic Characteristics Investigation
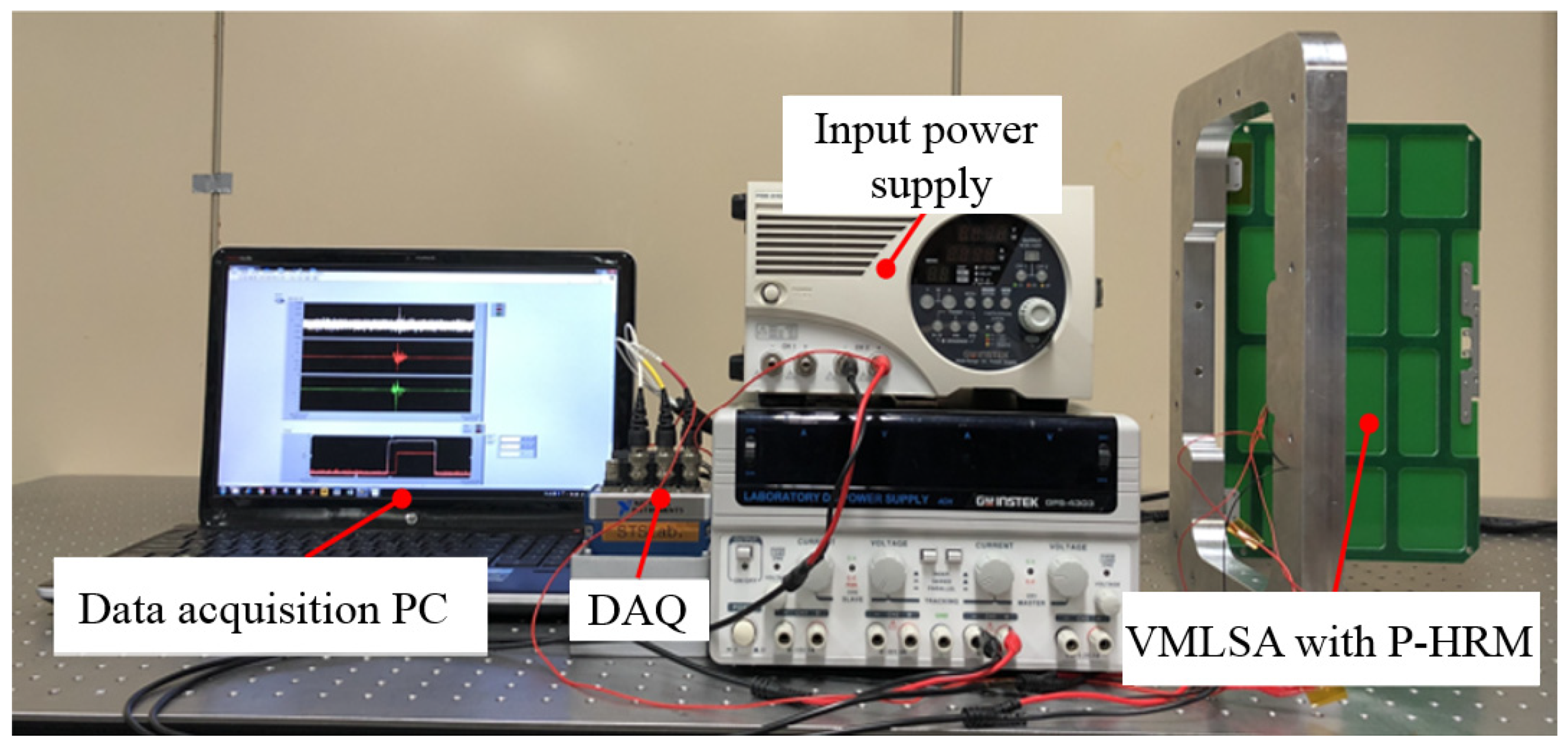
5. Experimental Validation
5.1. Solar Panel Deployment Test
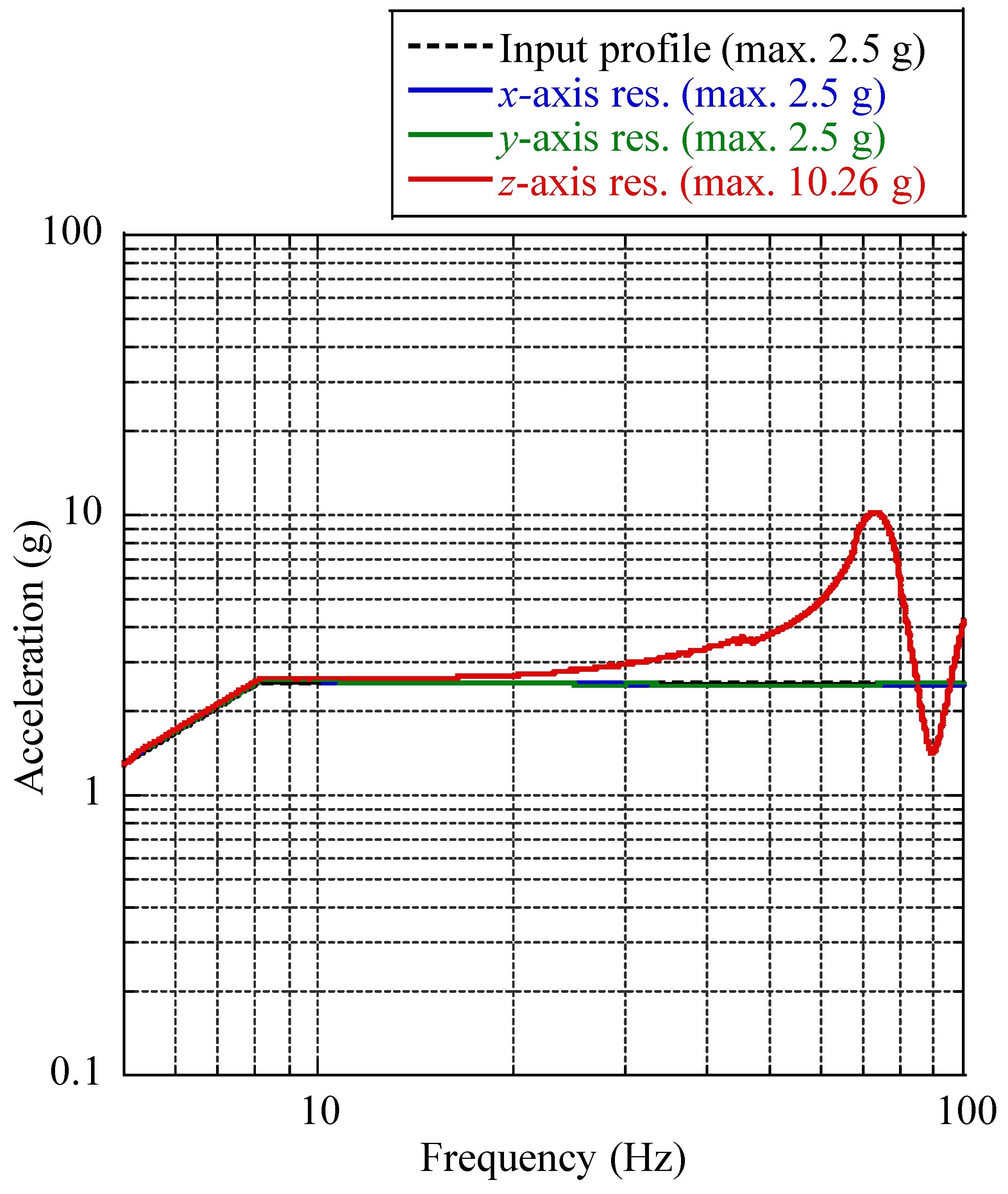
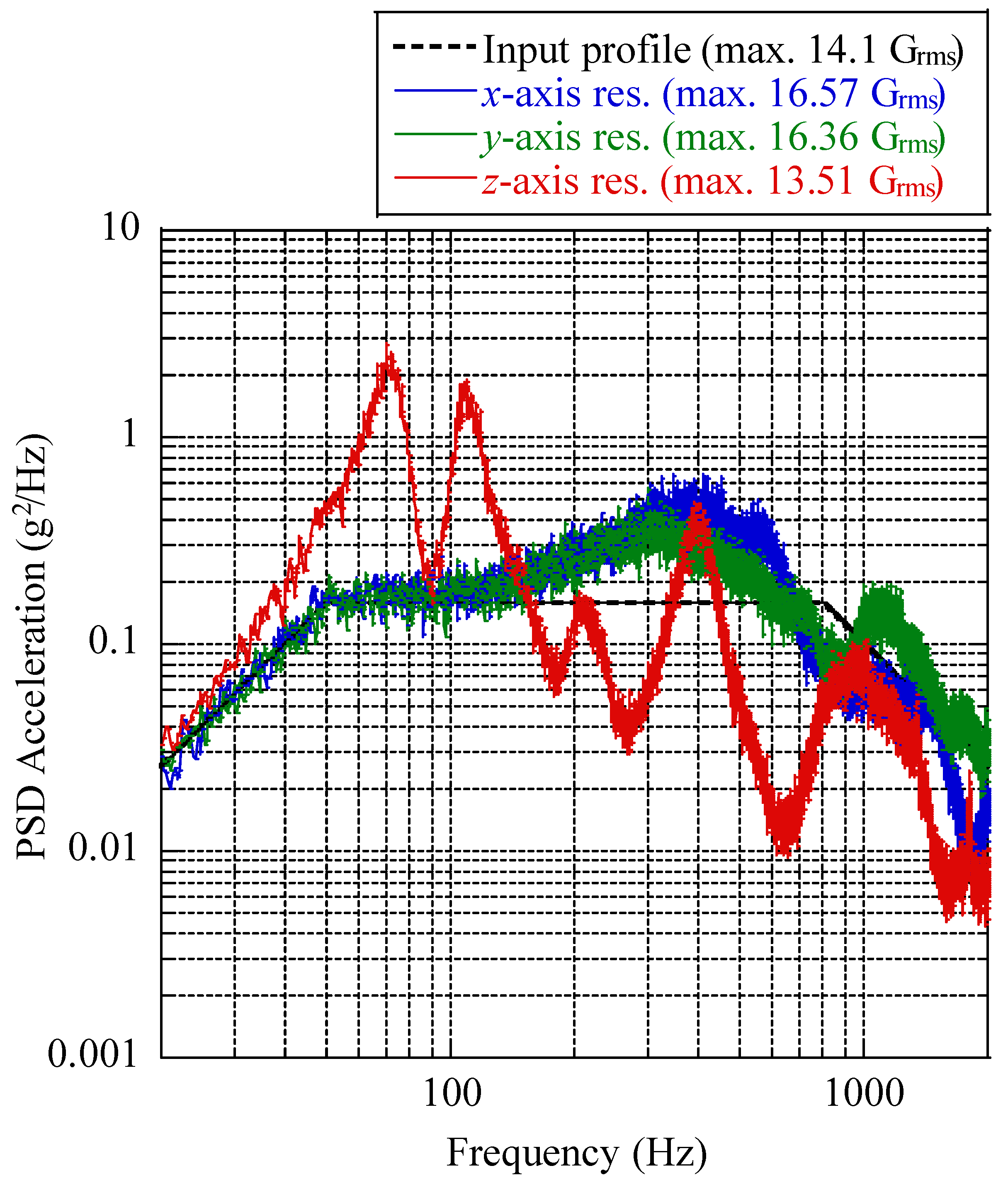
5.2. Launch Vibration Environment Test
5.3. Thermal Vacuum Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Santoni, F.; Piergentili, F.; Donati, S.; Perelli, M.; Negri, A.; Marino, M. An innovative deployable solar panel system for CubeSats. Acta Astronaut. 2014, 95, 210–217. [Google Scholar] [CrossRef]
- Anigstein, A.; Pena, R.S.S. Analysis of solar panel orientation in low altitude satellites. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 569–578. [Google Scholar] [CrossRef]
- Wijker, J.J. Spacecraft Structures, 1st ed.; Springer: Leiden, The Netherlands, 2008; pp. 1–504. [Google Scholar]
- Ampatzoglou, A.; Kostopoulos, V. Design, analysis, optimization, manufacturing, and testing of a 2U CubeSat. Int. J. Aerosp. Eng. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Chau, V.M.; Vo, H.B. Structural dynamics analysis of 3-U CubeSat. Appl. Mech. Mater. 2019, 894, 164–170. [Google Scholar] [CrossRef]
- Small Satellite, CubeSat Solar Panels-ISISPACE-Innovative Solutions in Space, Small Satellite Solar Panels. Available online: https://www.isispace.nl/product/isis-cubesat-solar-panels/ (accessed on 28 December 2020).
- Park, T.Y.; Chae, B.G.; Oh, H.U. Development of 6U CubeSat’s deployable solar panel with burn wire triggering holding and release mechanism. Int. J. Aerosp. Eng. 2019, 2019. [Google Scholar] [CrossRef]
- AZUR SPACE Solar Power GmbH, SPACE Solar Cells. Available online: http://www.azurspace.com/index.php/en/products/products-space/space-solar-cells (accessed on 28 December 2020).
- Lim, L.S.; Bui, T.D.V.; Low, K.S.; Tissera, M.S.C.; Pham, V.H.P.; Abhishek, R.; Soon, J.J.; Lew, J.M.; Aung, H.; Goh, S.T.; et al. VELOX-II: Challenges of developing a 6U nanosatellite. In Proceedings of the AIAA SPACE Conference and Exposition, Long Beach, CA, USA, 13–16 September 2016; pp. 1–11. [Google Scholar]
- Lee, S.; Hutputanasin, A.; Toorian, A.; Lan, W.; Munakata, R. CubeSat Design Specification Rev. 12; California Polytechnic State University: San Luis Obispo, CA, USA, 2009; pp. 1–22. Available online: https://srl.utu.fi/AuxDOC/tke/radmon/cubesat_standard.pdf (accessed on 28 December 2020).
- NanoPower DSP-GOMspace, Deployable Solar Panels for 3U and 6U Satellites. Available online: https://gomspace.com/shop/subsystems/power/nanopower-dsp.aspx (accessed on 28 December 2020).
- Solar Arrays-MMA Design LLC, Solar Arrays. Available online: https://mmadesignllc.com/products/solar-arrays/ (accessed on 25 January 2021).
- Thurn, A.; Huynh, S.; Koss, S.; Oppenheimer, P.; Butcher, S.; Schlater, J.; Hagan, P. A nichrome burn wire release mechanism for CubeSats. In Proceedings of the 41st Aerospace Mechanisms Symposium, Pasadena, CA, USA, 16–18 May 2012; pp. 479–488. [Google Scholar]
- Steinberg, D.S. Vibration Analysis for Electronic Equipment, 3rd ed.; John Wiley and Sons Inc.: New York, NY, USA, 2000; pp. 1–440. [Google Scholar]
- Minesugi, K.; Onoda, J. Passive vibration suppression using thin tape with viscous lamina. In Proceedings of the AIAA 36th Structures, Structural Dynamics and Materials Conference, New Orleans, LA, USA, 10–13 April 1995; pp. 200–206. [Google Scholar]
- Park, T.Y.; Shin, S.J.; Park, S.W.; Kang, S.J.; Oh, H.U. High-damping PCB implemented by multi-layered viscoelastic acrylic tapes for use of wedge lock applications. Eng. Fract. Mech. 2021, 241, 107370. [Google Scholar] [CrossRef]
- Bhattarai, S.; Kim, H.; Oh, H.U. CubeSat’s deployable solar panel with viscoelastic multi-layered stiffener for launch vibration attenuation. Int. J. Aerosp. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- Kang, S.J.; Oh, H.U. On-orbit thermal design and validation of 1U standardized CubeSat of STEP Cube Lab. Int. J. Aerosp. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Components-Blue Canyon Technologies, Attitude Control System, XACT-15. Available online: https: //www.bluecanyontech.com/components (accessed on 28 December 2020).
- Jang, S.S.; Kim, S.H.; Lee, S.R.; Choi, J. Energy balance and power performance analysis for satellite in low earth orbit. J. Astron. Space Sci. 2010, 27, 253–262. [Google Scholar] [CrossRef] [Green Version]
- 3M Company, 3MTM Adhesive Transfer Tape 966-Technical Data Sheet. Available online: https://3m.citrination.com/pif/ 000314?locale=en-US (accessed on 28 December 2020).
- Park, T.Y.; Kim, S.H.; Kim, H.; Oh, H.U. Experimental investigation on the feasibility of using spring-loaded pogo pin as a holding and release mechanism for CubeSat’s deployable solar panels. Int. J. Aerosp. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Bhattarai, S.; Kim, H.; Jung, S.H.; Oh, H.U. Development of pogo pin based holding and release mechanism for deployable solar panel of CubeSat. Int. J. Aerosp. Eng. 2019, 2019. [Google Scholar] [CrossRef]
- CFE Company, Spring-Loaded Connectors. Available online: https://www.cfeconn.com/2-54mm-pitch-through-hole-pogo-pin-catalog.html (accessed on 28 December 2020).
- PSA Company, Resistors-Walsin Technology, Resistors 3216 SMD. Available online: http://www.passivecomponent.com/products/resistors/ (accessed on 28 December 2020).
- Optocoupler, Components101, PC817 Photo-Coupler IC. Available online: https://components101.com/ics/pc817-ic-pinout-equivalent-datasheet (accessed on 28 December 2020).
- Bhattarai, S.; Go, J.S.; Kim, H.; Oh, H.U. Experimental validation of a highly damped deployable solar panel module with a pogo pin-based burn wire triggering release mechanism. Int. J. Aerosp. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- YGK Fishing Wire, YGK G-Soul Super Jigman Braid. Available online: https://www.tsourosmarine.gr/en/braids/1402-ygk-g-soul-super-jigmanbraid.html#/12-colormulticolored/4816-diameter_mm_cm-0_205_mm (accessed on 28 December 2020).
- Tian, S.; Xu, Z.; Wu, Q.; Qin, C. Dimensionless analysis of segmented constrained layer damping treatments with modal strain energy method. Shock Vib. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.X.; Hua, H.X.; Zhang, Z. Robust control of plate vibration via active constrained layer damping. Thin Walled Struct. 2004, 42, 427–448. [Google Scholar] [CrossRef]
- ECSS-E-ST-33-01C Rev.2-Mechanisms. Space Engineering Mechanisms, ECSS Secretariat ESA-ESTEC Requirements & Standards Division; European Cooperation for Space Standardization: Noordwijk, The Netherlands, 2019; pp. 1–97. Available online: https://ecss.nl/standard/ecss-e-st-33-01c-rev-2-1-march-2019-space-engineering-mechanisms/ (accessed on 28 December 2020).
- Duzellier, S. Radiation effects on electronic devices in space. Aerosp. Sci. Technol. 2005, 9, 93–99. [Google Scholar] [CrossRef]
- Singarayar, F.; Reinhard, R.; Asma, C.; Thoemel, J.; Scholz, T.; Bernal, C.; Weggelaar, W.; Kataria, G.S.D.; Richard, M. QB50 System Requirements and Recommendations. 2013, pp. 1–28. Available online: https://www.qb50.eu/index.php/techdocs/category/QB50_Systems_Requirements_issue_44835.pdf?download=30:qb50-docs (accessed on 28 December 2020).
- GEVS: GSFC-STD-7000A. General Environmental Verification Standard (GEVS) for GSFC Flight Programs and Projects; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2013; pp. 1–203. Available online: https://standards.nasa.gov/standard/gsfc/gsfc-std-7000 (accessed on 28 December 2020).
- Malagoli, M.; Allewaert, Y. Improvement of the wire rating standards based on TV testing and thermal modeling. In Proceedings of the 48th International Conference on Environmental Systems, Albuquerque, NM, USA, 8–12 July 2018; pp. 1–15. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Specifications | ||||
|---|---|---|---|---|---|
| Satellite name | STEP Cube Lab-II | ||||
| Size (mm) | 366 (X) × 117.8 (Y) × 238.5 (Z) | ||||
| Weight (kg) | 9.6 | ||||
| Orbital parameter | Orbit: Sun-synchronous orbit Altitude: 700 km Orbital inclination angle: 98.2 deg. Local time of descending node (LTDN): 16:00 p.m | ||||
| Mission payload | Primary payloads: EOC, BBIRC, LWIRC | ||||
| Secondary payloads: PDHS and PDTS, VMLSA, P-HRM, SADA | |||||
| Camera performance | Camera | EOC | BBIRC | LWIRC | |
| GSD (m) | 10 | 350 | 350 | ||
| Observation width (km) | 40 × 40 | 220 × 160 | 220 × 160 | ||
| Wave length range (μm) | 0.38–0.94 | 3–14 | 9–12 | ||
| Observation mission time (s) | Multi-band still imaging mode: 5.85 BBIRC and LWIRC video mode: 10 | ||||
| Ground station contact | 7.5 Minutes (Average) | ||||
| Communication system | Uplink | UHF band: 1200 bps Audio frequency shift keying (AFSK) | |||
| Downlink | UHF band: 9600 bps Gaussian minimum shift keying (GMSK) | S-band: >8 Mbps 16-ary amplitude and phase shift keying (16-APSK) | |||
| Attitude control system | 3-axis Attitude control method | ||||
| Mission life | 1 Year | ||||
| Time (min) | Parameter | Power (W) | Power (Wh) | Charge/ Discharge (Wh) | Remarks | |
|---|---|---|---|---|---|---|
| Daylight | 72 | Generation | 33.29 | 39.95 | ||
| Consumption | −18.38 | −22.06 | ||||
| Average power for charging | 17.89 | |||||
| Actual power for charging (Considering conversion eff.) | 11.44 | |||||
| Eclipse | 27 | Consumption | −18.38 | −9.19 | −9.19 | |
| Power margin | 2.25 | |||||
| Power budget (%) | 5.63 | Req.: >0 | ||||
| Battery depth of discharge (DoD) (%) | 13.41 | Req.: <20 | ||||
| Items | Mass (g) |
|---|---|
| Printed circuit board (PCB) panel | 201.5 |
| Thin stiffeners | 85 |
| Viscoelastic tapes | 3 |
| Pogo pin-based HRM | 6 |
| Hinges and fasteners | 11 |
| Total | 306.5 |
| Item | Details | Value |
|---|---|---|
| FR4 | Elastic modulus (Pa) | 18.73 × 109 |
| Density (kg/m3) | 1850 | |
| Poisson’s ratio | 0.136 | |
| Thermal conductivity (W/mK) | 0.29 | |
| Adhesive tape [22] | Manufacturer | 3M Company |
| Adhesive material | Acrylic | |
| Adhesive thickness (mm) | 0.06 | |
| Color | Transparent | |
| Allowable temperature range (°C) | −40 to 232 | |
| Thermal conductivity at 41 °C (W/mK) | 0.178 | |
| Coefficient of thermal expansion (ppm/°C) | 1.99 | |
| Adhesive strength to steel (N/100 mm) | 159 | |
| Total mass loss (TML) and Collected volatile condensable material (CVCM) outgassing (%) | 0.93, 0.01 |
| Items | Details | Value |
|---|---|---|
| Pogo pin | Manufacture | CFE Corporation Co. |
| Voltage and current (V, A) | 12, 3 | |
| Max. electrical contact resistance (mΩ) | 50 | |
| Life test (Cycle) | 100,000 | |
| Qualification temperature range (°C) | −40 to 85 | |
| Spring force (N) | 0.68 ± 0.19 | |
| Total length (mm) | 9 | |
| Full stroke (mm) | 1.4 | |
| Working stroke (mm) | 1.0 | |
| Wire | Manufacture | YGK |
| Material | Dyneema | |
| Diameter (mm) | 0.205 | |
| Max. allowable force (N) | 88.2 | |
| Resistor | Manufacture | Walsin technology Co., Taipei, Taiwan |
| Package | SMD Type | |
| Electrical resistance (ohm) | 4.7 | |
| Resistance tolerance (%) | ±1 | |
| Max. power dissipation (W) | 0.25 |
| Input | Solar Panel Deployment Status | ||||
|---|---|---|---|---|---|
| Undeployed | Deployed | ||||
| Vin | Enable | Pogo pin voltage | Output voltage | Pogo pin voltage | Output voltage |
| 1 | 1 | 1 | 0 | 1 | 1 |
| 1 | 0 | 0 | 0 | 0 | 0 |
| Solar Panel | 1st Eigenfrequency (Hz) | Damping Ratio |
|---|---|---|
| Typical PCB panel | 82.6 | 0.036 |
| VMLSA | 110.1 | 0.141 |
| Test | Excitation Axis | Status | Corresponding Axis 1st Eigenfrequency (Hz) | Frequency Shift Difference (%) |
|---|---|---|---|---|
| Sine vibration | x | Before | 835.2 | 0.19 |
| After | 833.6 | |||
| y | Before | 602.4 | 0 | |
| After | 602.4 | |||
| z | Before | 75.0 | 0.93 | |
| After | 74.3 | |||
| Random vibration | x | Before | 833.6 | 0.19 |
| After | 832.0 | |||
| y | Before | 602.4 | 0 | |
| After | 602.4 | |||
| z | Before | 74.3 | 4.85 | |
| After | 70.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhattarai, S.; Go, J.-S.; Kim, H.; Oh, H.-U. Development of a Novel Deployable Solar Panel and Mechanism for 6U CubeSat of STEP Cube Lab-II. Aerospace 2021, 8, 64. https://doi.org/10.3390/aerospace8030064
Bhattarai S, Go J-S, Kim H, Oh H-U. Development of a Novel Deployable Solar Panel and Mechanism for 6U CubeSat of STEP Cube Lab-II. Aerospace. 2021; 8(3):64. https://doi.org/10.3390/aerospace8030064
Chicago/Turabian StyleBhattarai, Shankar, Ji-Seong Go, Hongrae Kim, and Hyun-Ung Oh. 2021. "Development of a Novel Deployable Solar Panel and Mechanism for 6U CubeSat of STEP Cube Lab-II" Aerospace 8, no. 3: 64. https://doi.org/10.3390/aerospace8030064
APA StyleBhattarai, S., Go, J.-S., Kim, H., & Oh, H.-U. (2021). Development of a Novel Deployable Solar Panel and Mechanism for 6U CubeSat of STEP Cube Lab-II. Aerospace, 8(3), 64. https://doi.org/10.3390/aerospace8030064