Abstract
In the last few years, a new class of fractional-order (FO) systems, known as Katugampola FO systems, has been introduced. This class is noteworthy to investigate, as it presents a generalization of the well-known Caputo fractional-order systems. In this paper, a novel lemma for the analysis of a function with a bounded Katugampola fractional integral is presented and proven. The Caputo–Katugampola fractional derivative concept, which involves two parameters 0 < α < 1 and ρ > 0, was used. Then, using the demonstrated barbalat-like lemma, two identification problems, namely, the “Fractional Error Model 1” and the “Fractional Error Model 1 with parameter constraints”, were studied and solved. Numerical simulations were carried out to validate our theoretical results.
Keywords:
fractional-order systems; bounded Katugampola fractional integral; Caputo–Katugampola fractional derivative; identification MSC:
26A33; 34A08
1. Introduction
In the last decades, fractional calculus and the investigation of fractional-order systems have distinctly risen. This fact has been stimulated by the numerous applications of the fractional calculus in science and engineering [1,2,3,4]. In the literature, different definitions of the fractional derivative have been introduced [5]. One of the most famous concepts of the fractional derivative is the Caputo one. Since many years, a great interest is being given by researchers in solving different queries related to the control theory for Caputo fractional-order systems. As examples of these works, we cite fault estimation for Caputo fractional-order descriptor systems [6,7], stabilization for Caputo fractional-order reaction–advection–diffusion systems [8], and model reference control for Caputo fractional-order linear systems [9,10].
Recently, a novel fractional derivative, called the Caputo–Katugampola derivative, which is a generalization of the Caputo derivative, has been suggested by Katugampola [11,12]. In an interesting study [13], Katugampola affirmed the existence of solutions of Caputo–Katugampola fractional differential equations. The concept of this new derivative is characterized by two parameters: 0 < α < 1 and ρ > 0. It is important to note that if ρ = 1, the Caputo–Katugampola derivative reduces to the classical Caputo derivative [14,15]. Another particular case: if ρ→0, then one obtains the Caputo–Hadamard fractional derivative [16]. From a physical point of view, some investigations are currently conducted in relation with Katugampola fractional-order systems. For instance, the authors of [17] investigated the Katugampola fractional derivative for the RL, LC, RC, and RLC electrical circuits.
On the other hand, adaptive systems have a great importance in the control theory [18,19,20]. Dealing with the integer-order calculus, the Barbalat’s lemma [21] can be considered as a key tool in studying the stability of adaptive systems. Concerning Caputo fractional-order systems, no analogue Barbalat’s lemma to the one proved in [21] has been successfully demonstrated in the literature. The closest lemma to the one in [21], ever proved for Caputo fractional-order systems, has been recently developed in [22]. Using another fractional derivative concept, which is the conformable derivative, the authors in [23] proved the existence of an analogue Barbalat’s lemma to the one in [21]. In this paper, we present a Barbalat-like lemma for the class of Katugampola fractional-order systems. Moreover, the importance of this established lemma in studying adaptive schemes is shown through investigating two identification problems.
The identification task has received particular interest from researchers for many years, as this is a prominent task for real-world applications. Different identification principles have been defined, and various techniques have been deployed to tackle such an important issue. For example, the authors in [24] developed a direct method for parameter identification of distributed parameter systems. In another work [25], it was a question of reviewing the synchronization-based parameter identification for dynamical systems from time series. Another technique consists of using metaheuristic algorithms for PV parameter identification [26].
The identification query for fractional-order systems can be regarded as a recent axis of research [27,28]. Generally speaking, “error models” constitute one of the well-known techniques to carry out the identification task. Among these models, one particular type, called “Error Model 1”, has been used quite often in the literature [29]. The generalization of the classical Error Model 1 to the fractional calculus is well known as the “Fractional Error Model 1” and was firstly investigated in [30].
In this paper, we exploited the new presented lemma in two identification schemes. In the first scheme, a Fractional Error Model 1 was investigated to the class of Katugampola fractional systems. In the second scheme, two adaptive Katugampola fractional systems, related by a linear constraint, were considered. In this case, the so-called “Fractional Error Model 1 with parameter constraints” was used.
The contribution of this paper can be summarized as follows:
- The main novelty in this work was that it presents a new Barbalat-like lemma for the class of Katugampola fractional-order systems. To the knowledge of the authors, such a particular result is developed for the first time, and no existing papers have demonstrated it.
- In a second stage, the authors exploited this new lemma in two identification schemes. In the first scheme, a Fractional Error Model 1 was investigated to the class of Katugampola fractional systems. In the second scheme, two adaptive Katugampola fractional systems, related by a linear constraint, were considered. In this case, the so-called “Fractional Error Model 1 with parameter constraints” was used.
The rest of the paper is organized as follows. Useful preliminaries in relation with Katugampola fractional-order systems are presented in Section 2. In Section 3, the novel lemma for Katugampola fractional systems is presented and proven. Finally, the given lemma in Section 3 is exploited in Section 4 in the context of identification problems. Moreover, the theoretical and simulation studies for both classes of “Simple Fractional Error Model 1” and “Fractional Error Model 1 with parameter constraints” were investigated.
2. Preliminaries
Some useful definitions and results are prompted from the literature. In the following, we adopt the definitions of the Katugampola fractional integral [11] and the Caputo–Katugampola fractional derivative [31]. Through the paper, we define the Katugampola parameters: and , the initial time , and the integration variable .
Definition 1.
Let . For any and , the generalized Katugampola fractional integral (provided it exists) is defined as
is the Gamma function generalizing factorial for non-integer arguments.
Definition 2.
Let . For any and , the generalized Caputo–Katugampola fractional derivative of an absolutely continuous function is defined as
It is noteworthy that the above Definition 2 is a generalization of the Caputo derivative concept:
Definition 3.
Letbe the integer part of . The Caputo fractional derivative is defined as
For , this derivative is reduced to
Lemma 1
([32]). Let and a constant symmetric and positive definite matrix. Then, the following relationship holds
3. Evolution of a Function with a Bounded Katugampola Fractional Integral
In the following, an original lemma concerning functions with a bounded Katugampola fractional integral is presented and proven. Later, in Section 4, the importance of this lemma in studying adaptive systems, in the context of identification problems, will be shown.
Lemma 2.
Letand be a nonnegative function. If there exists such that
then
Proof.
We have from (1):
Then, for any , one has
- (i)
- If , then :ThenThen, by using (3), one can find
- (ii)
- If , then :ThenThen, by using (3), one can findThen
As a conclusion from the two cases (i) and (ii), one has
□
Remark 1.
Lemma 2, which is the principal contribution in this paper, is a theoretical mathematical result. Discussing the relation between this theoretical finding and real-world applications, the authors remind the readers that Lemma 2 is useful in studying adaptive systems. Indeed, many real systems are adaptive systems, and such ones require particular mathematical tools. An example of real-world adaptive systems is the induction machine in [19], where the authors designed an adaptive controller within the integer-order calculus framework. The relevance of the present work is that it would enhance the development of future research works dedicated to real-world adaptive systems within the fractional-order calculus framework.
4. Application to Identification Problems
4.1. Identification Using Fractional Error Model 1
4.1.1. Theoretical Study
Dealing with the identification task, a very frequent representation used in the literature is given by [22,33]
where and are available measured signals, and is the vector of constant parameters to be identified. Naturally, the vector is composed of bounded signals. Define as an estimate of the output signal , and as the estimate of the constant parameter vector . Then, the output error and the parametric error are given, respectively, by and . In such a situation, one can obtain the so-called “Error Model 1”:
In the integer-order case, the well-known adaptive law in order to carry out the identification task is given by
In the fractional-order case, and under the Caputo–Katugampola fractional derivative concept, one obtains the following Fractional Error Model 1:
Consider the Caputo–Katugampola fractional derivative of . Using Lemma 1, one gets
Then, is a bounded function, and . Regarding (5) and the fact that is bounded, one can conclude that is also bounded.
Integrating (8), it follows that
Then, using Lemma 2, we conclude that
Remark 2.
In relation with the parameter , three particular cases arise:
- : In this case, (9) reduces to the convergence in mean value of :
- : This case corresponds to the classical Caputo derivative concept. An analogue study has been conducted for Caputo fractional systems, in [22].
- and : This case corresponds to the integer-order calculus framework. In this case, the adaptive law is (6), instead of (7). Moreover, from a theoretical point of view, (9) reduces to the convergence to zero of .
4.1.2. Simulation Study
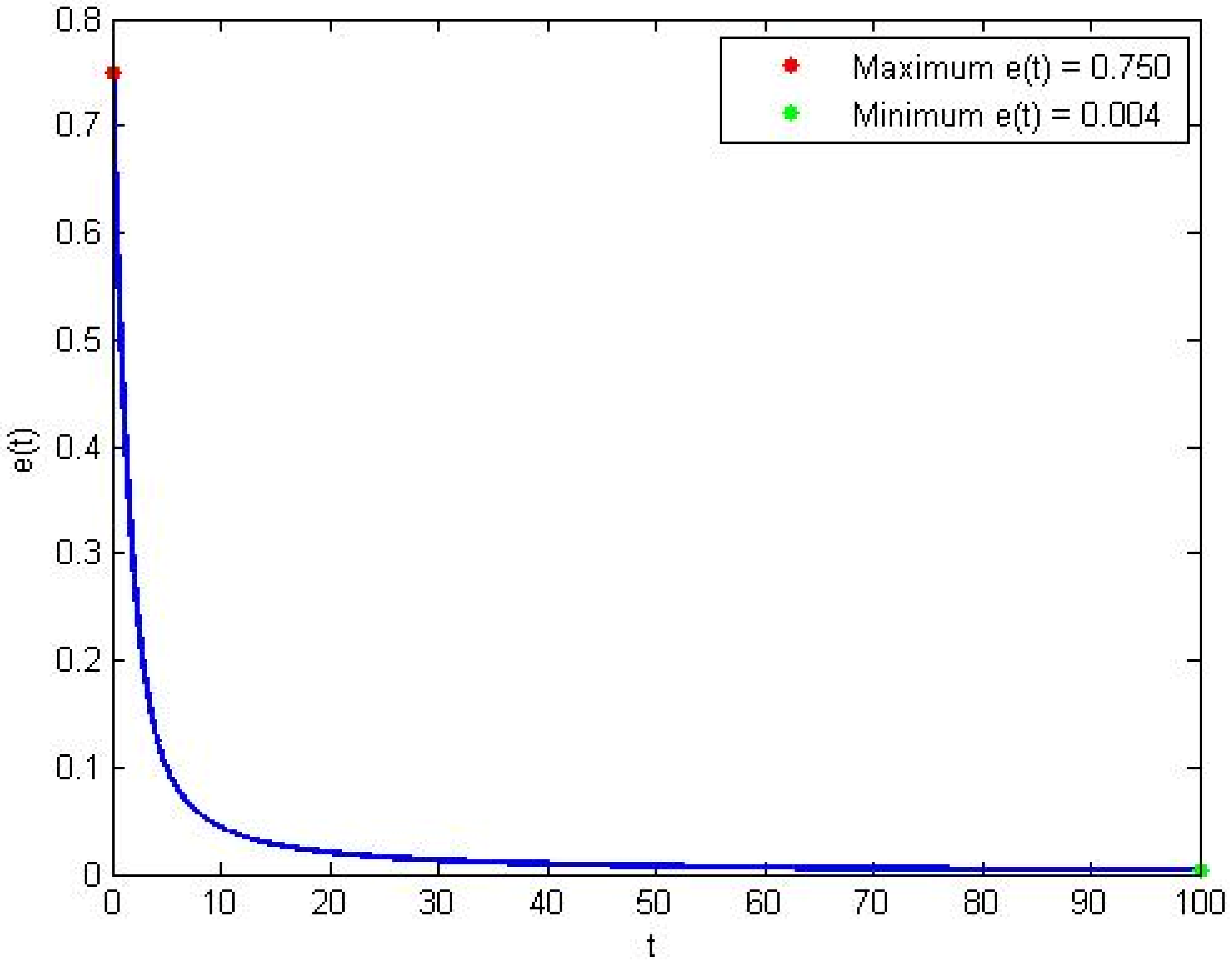
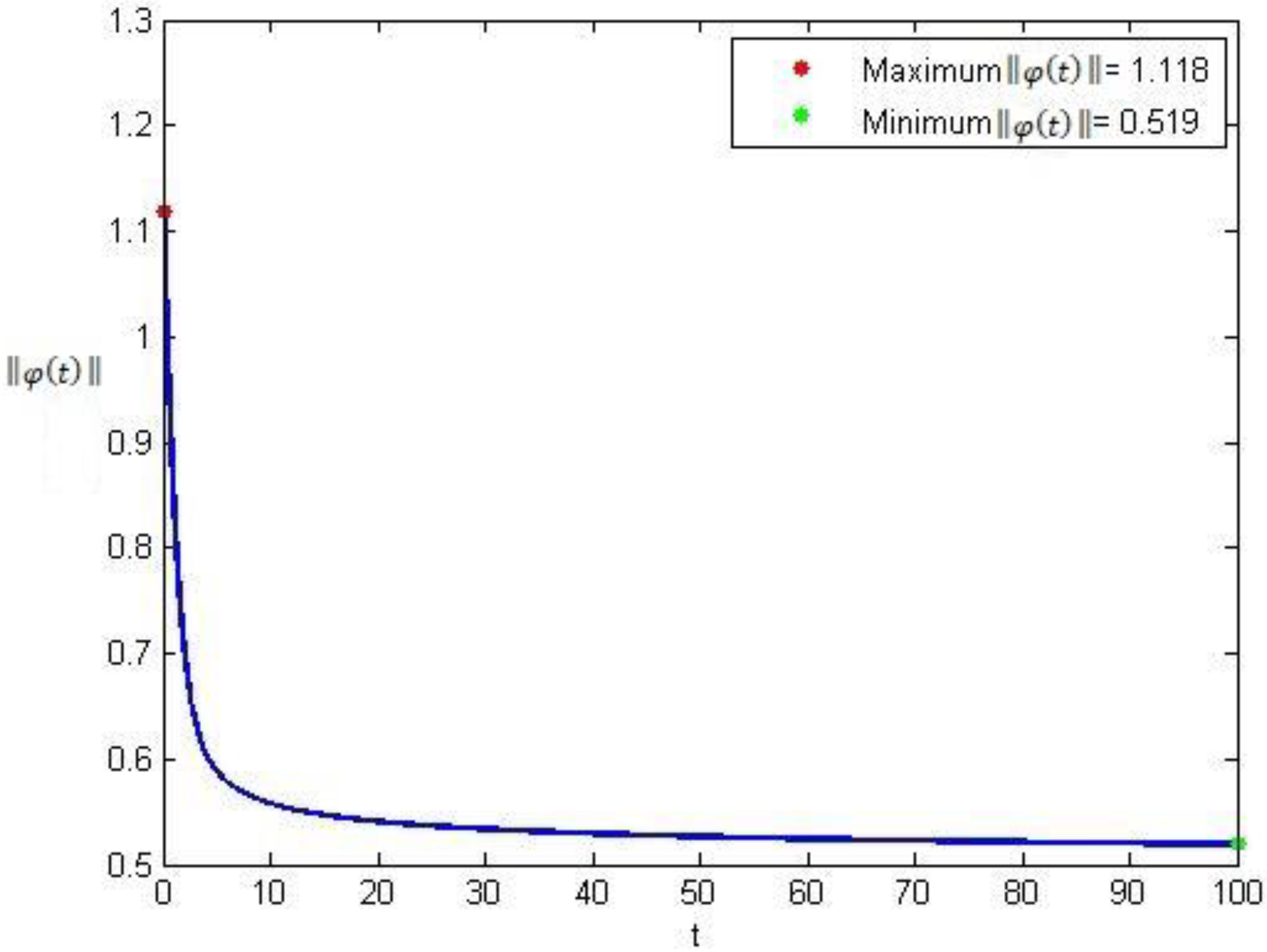
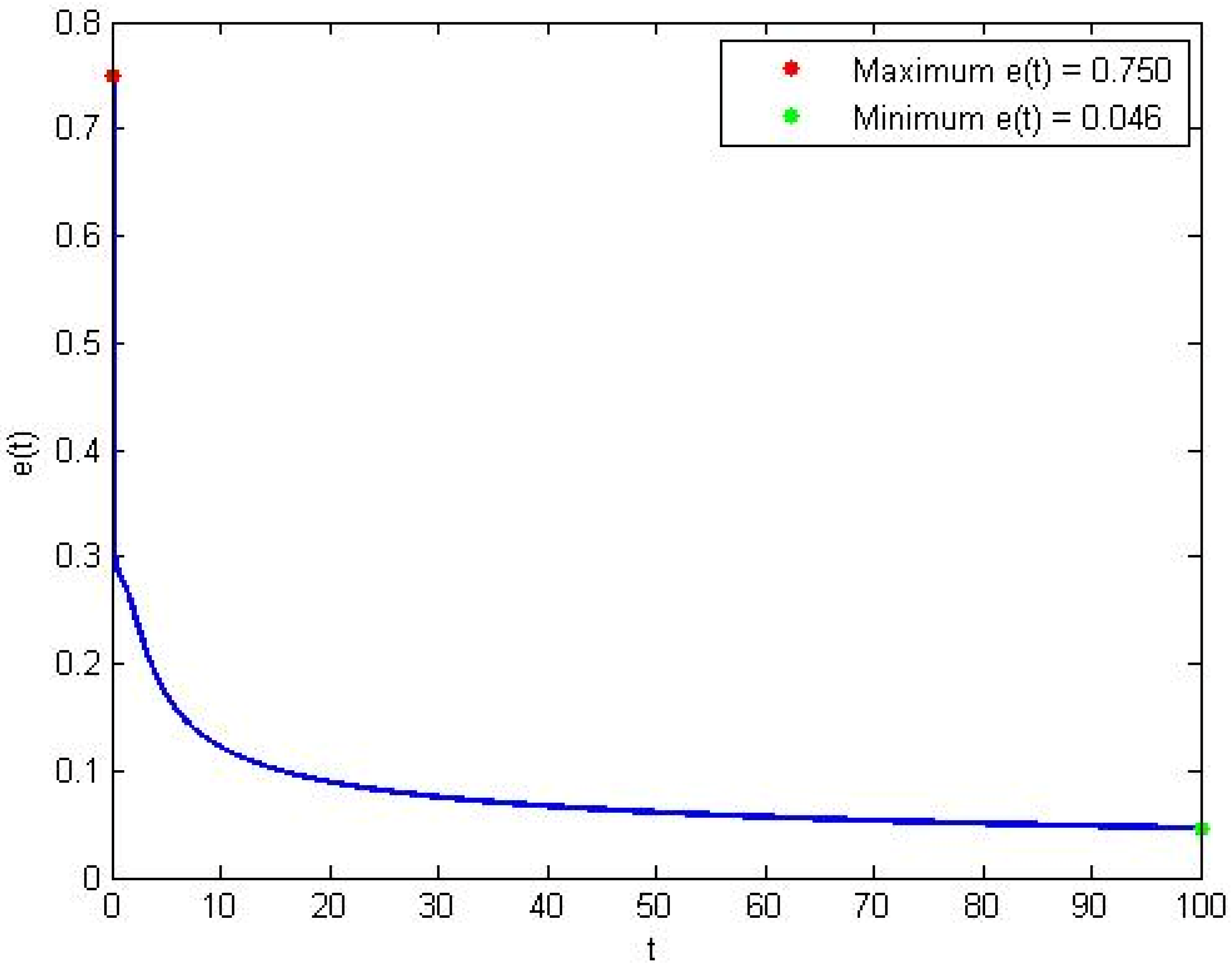
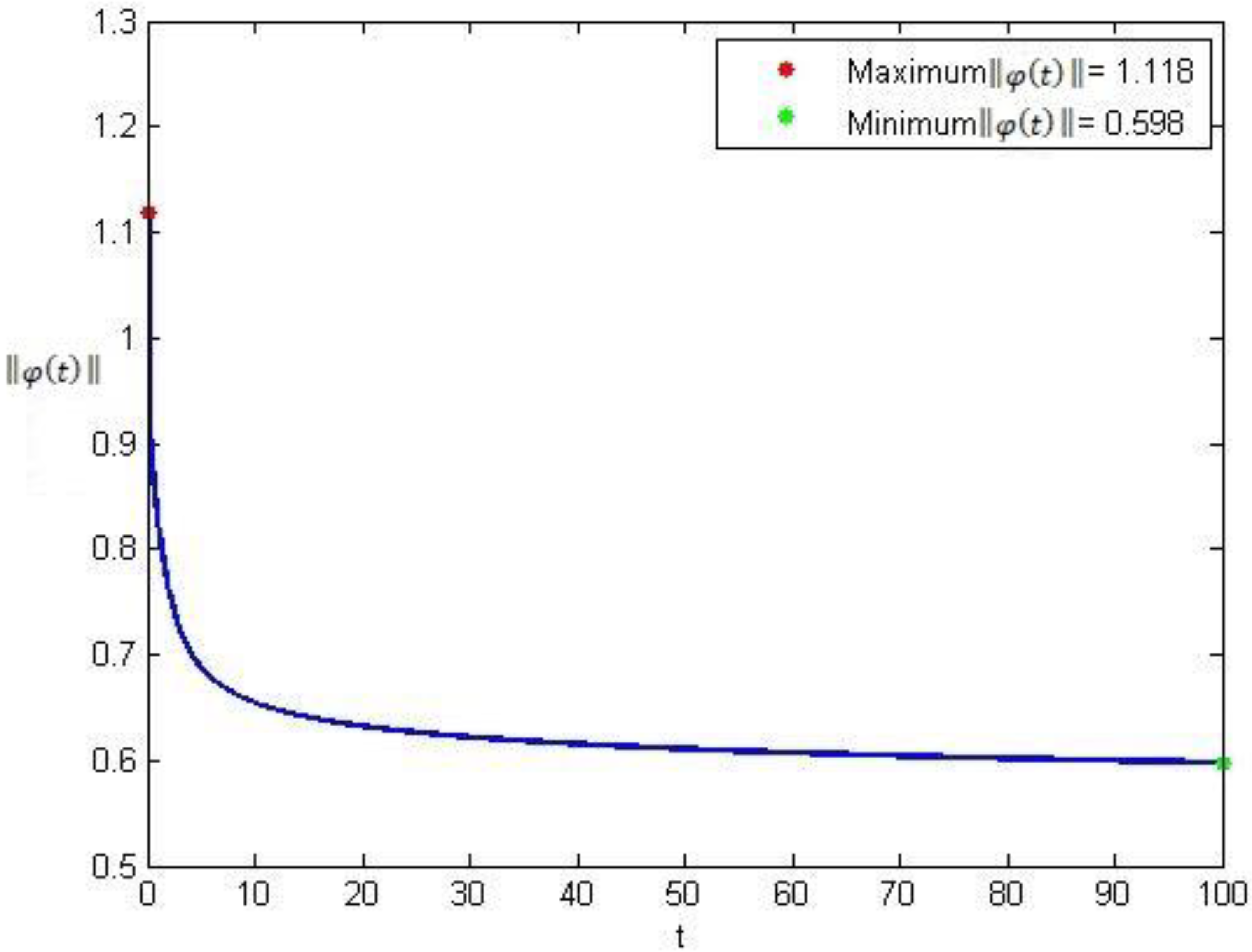
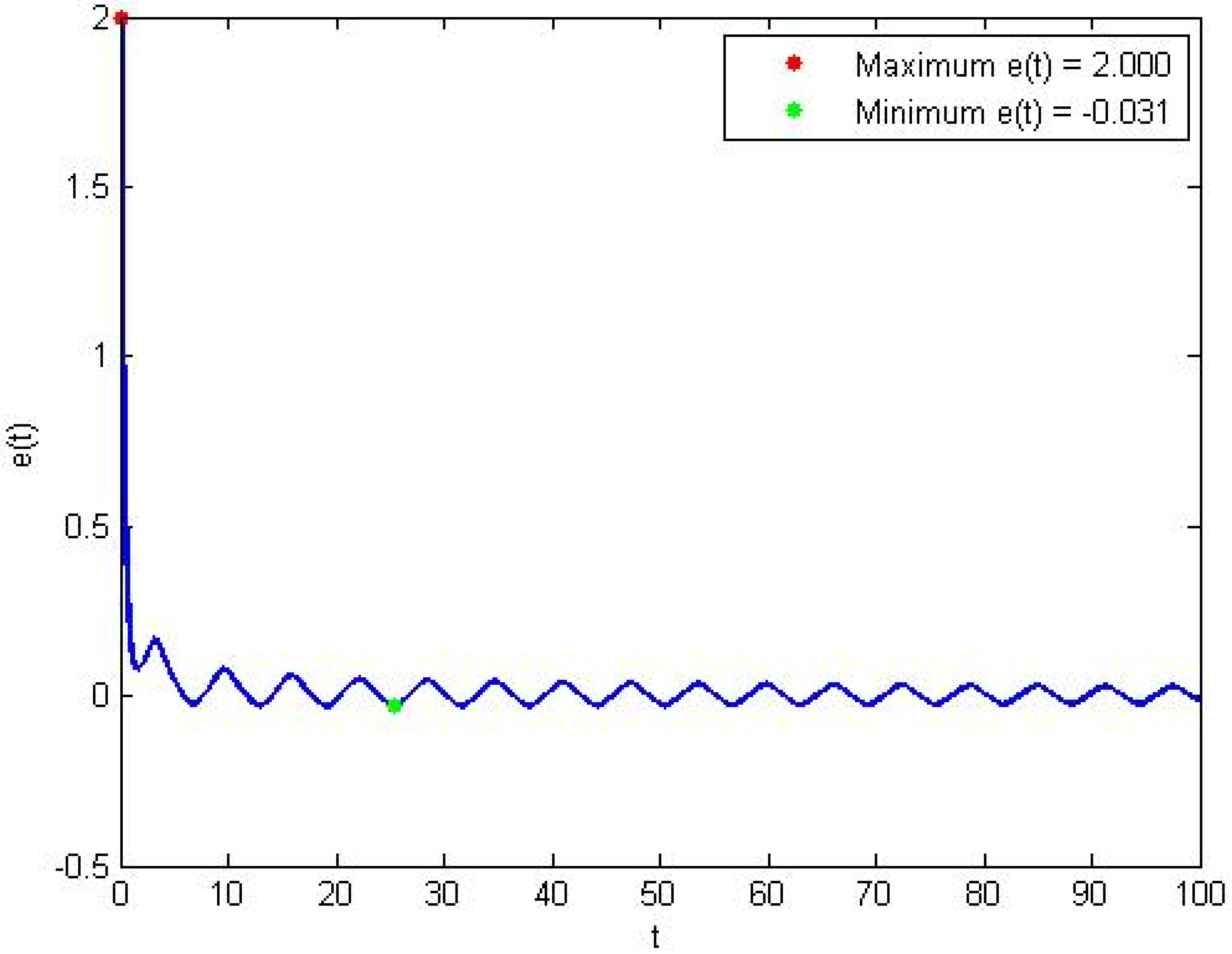
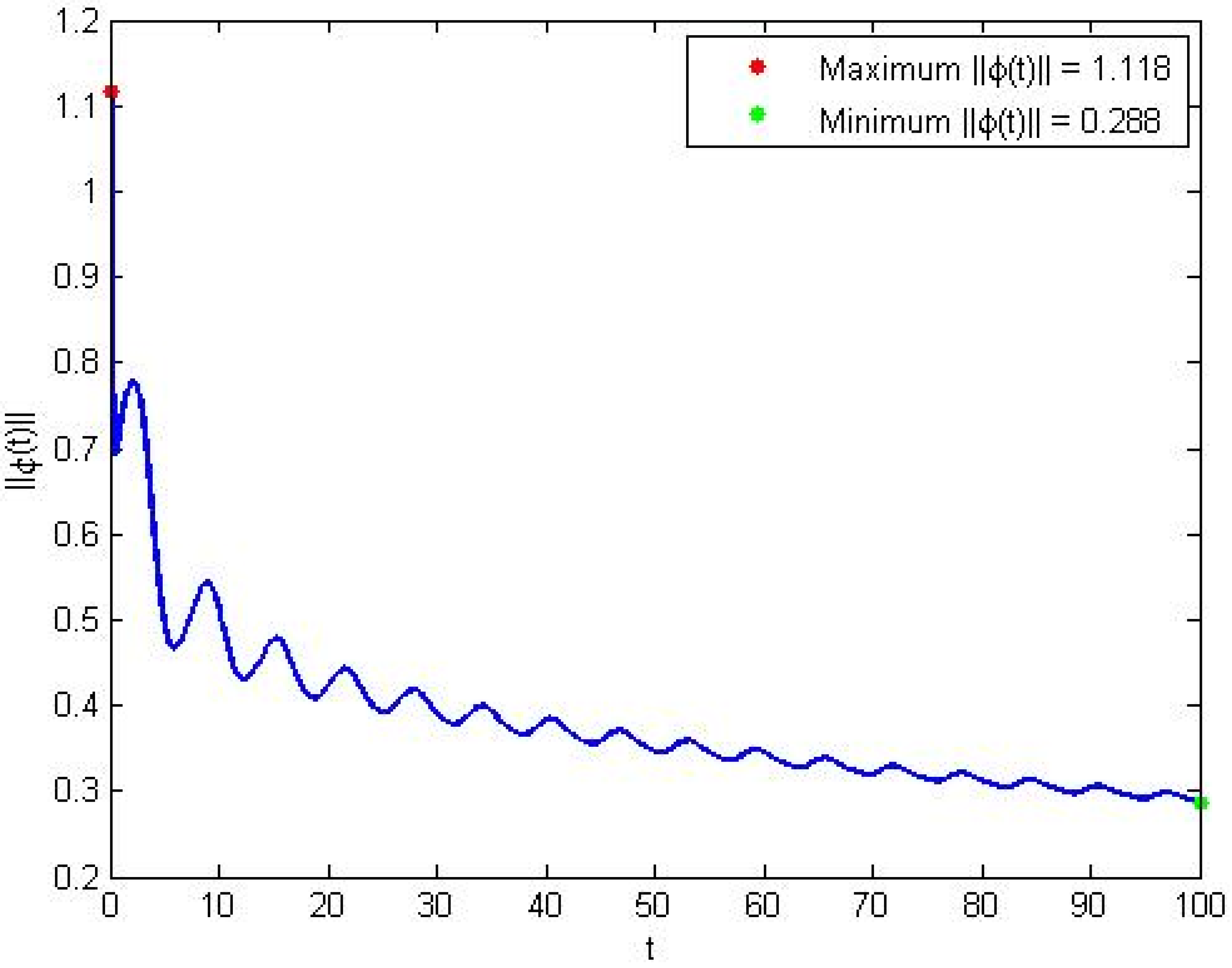
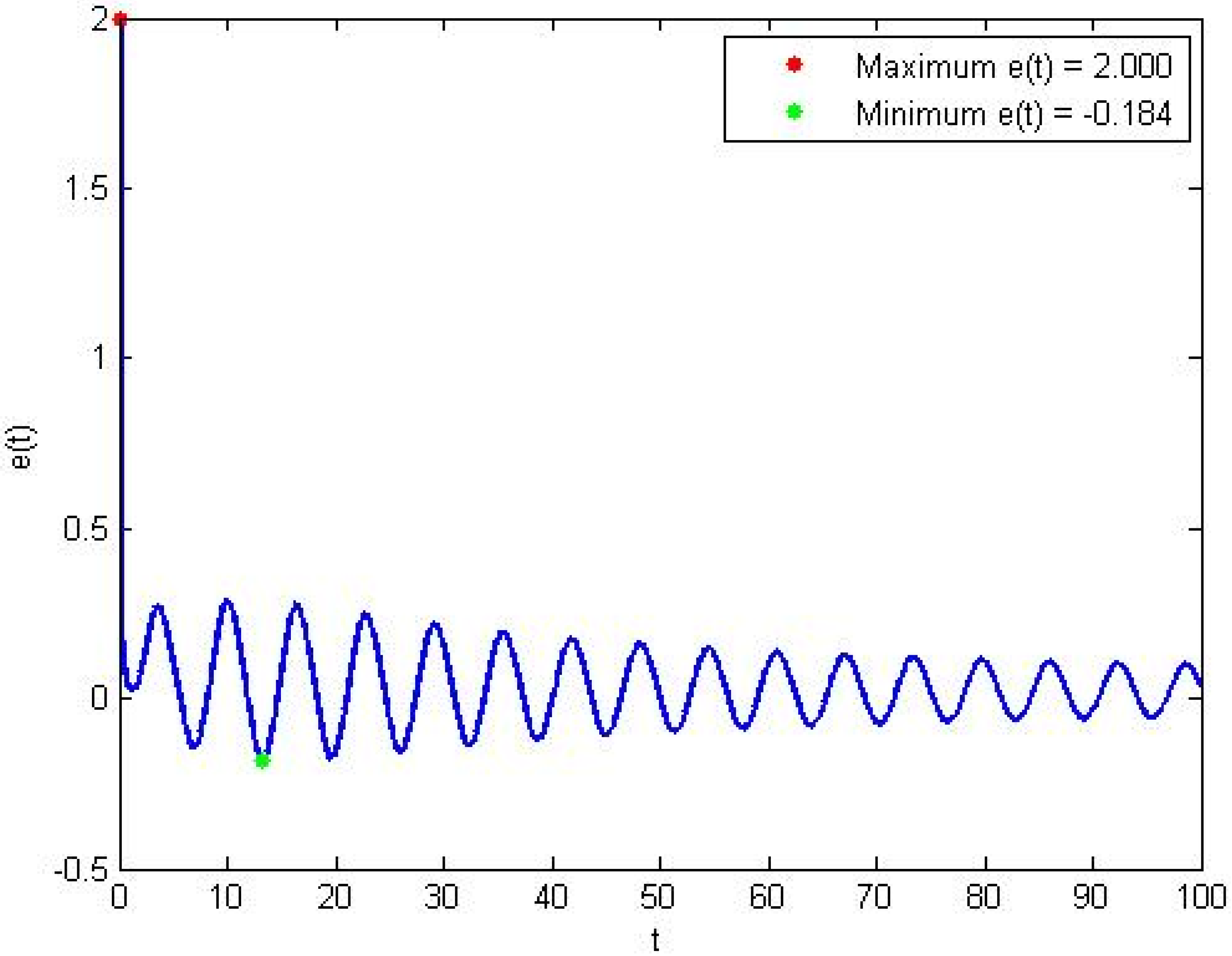
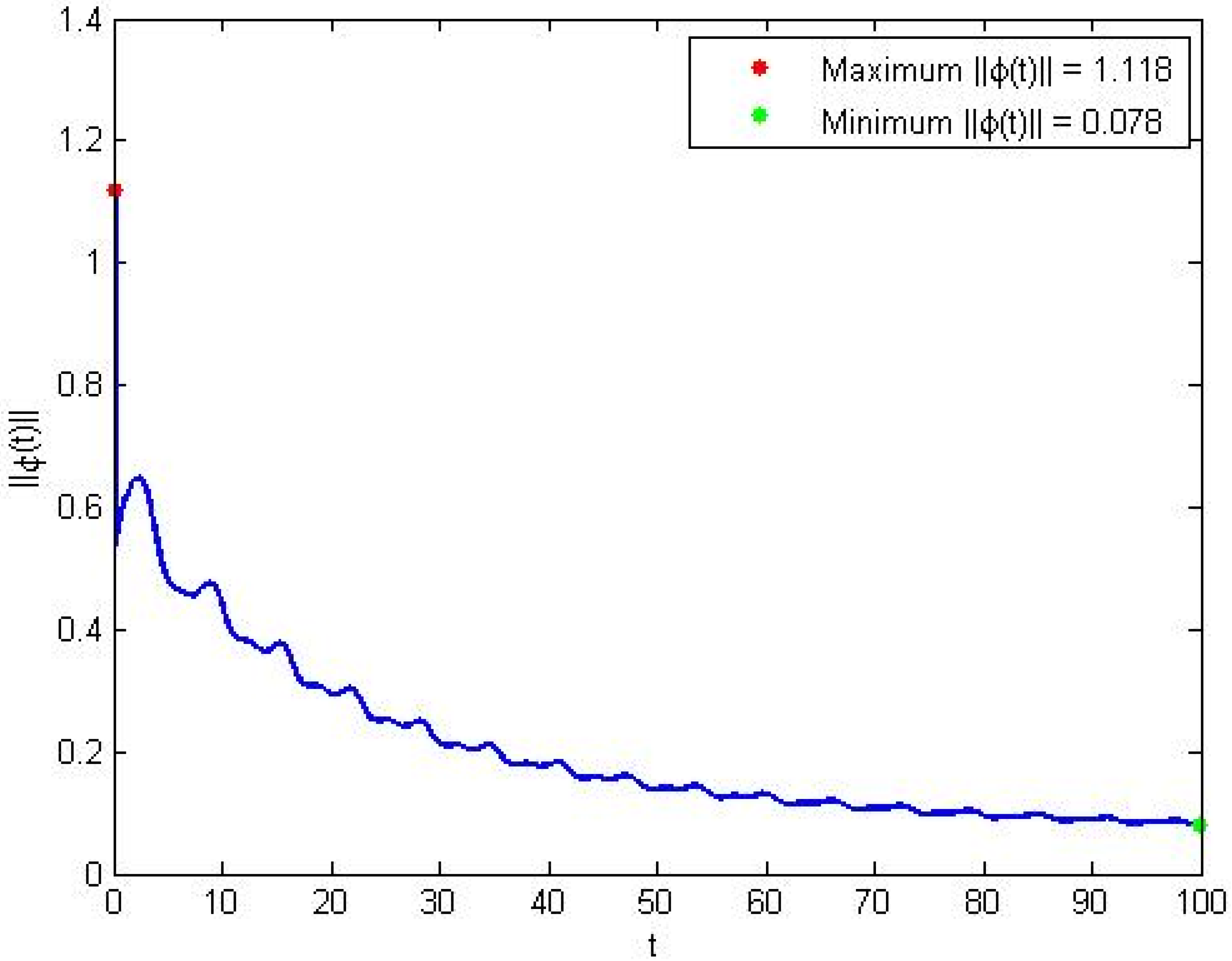
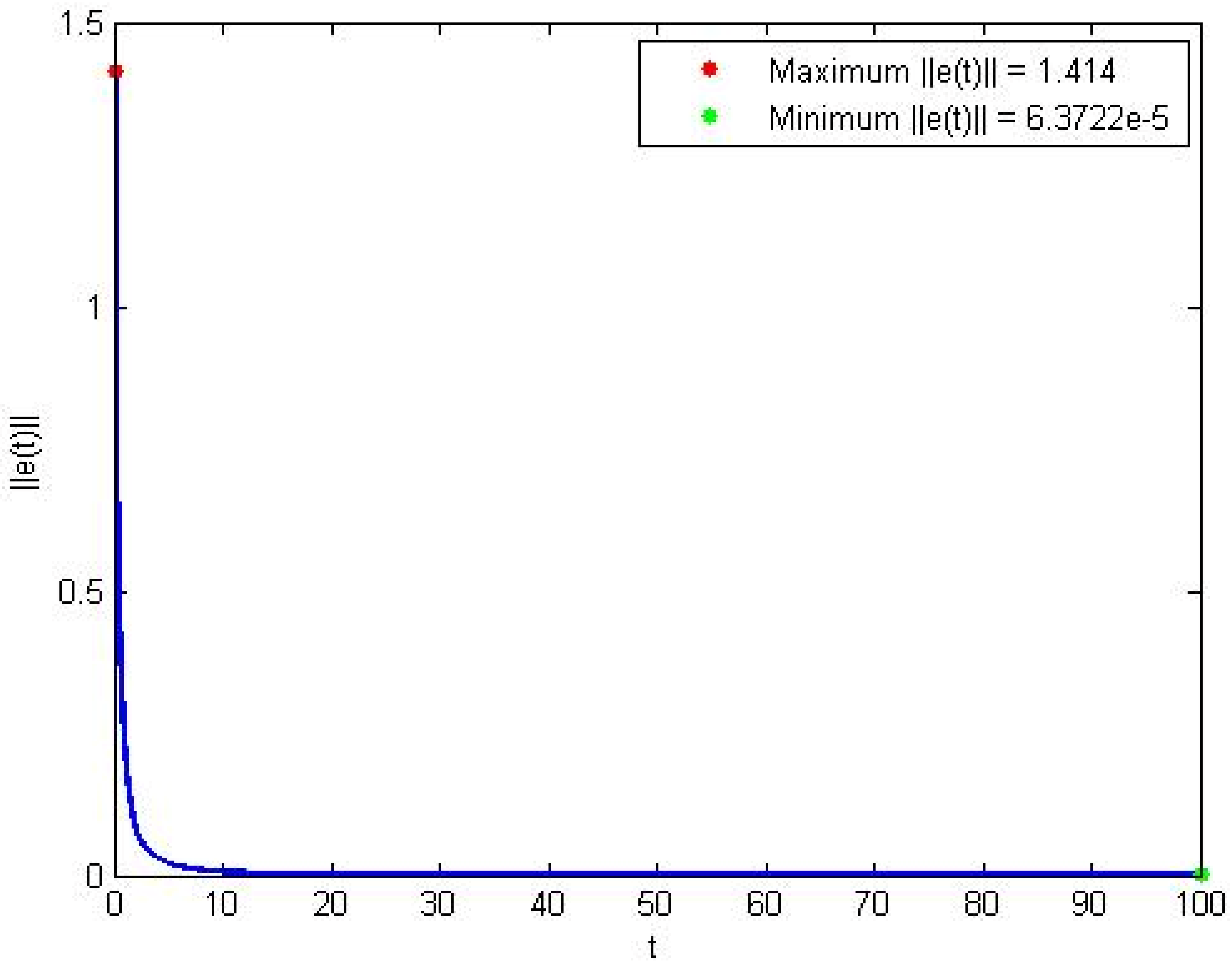
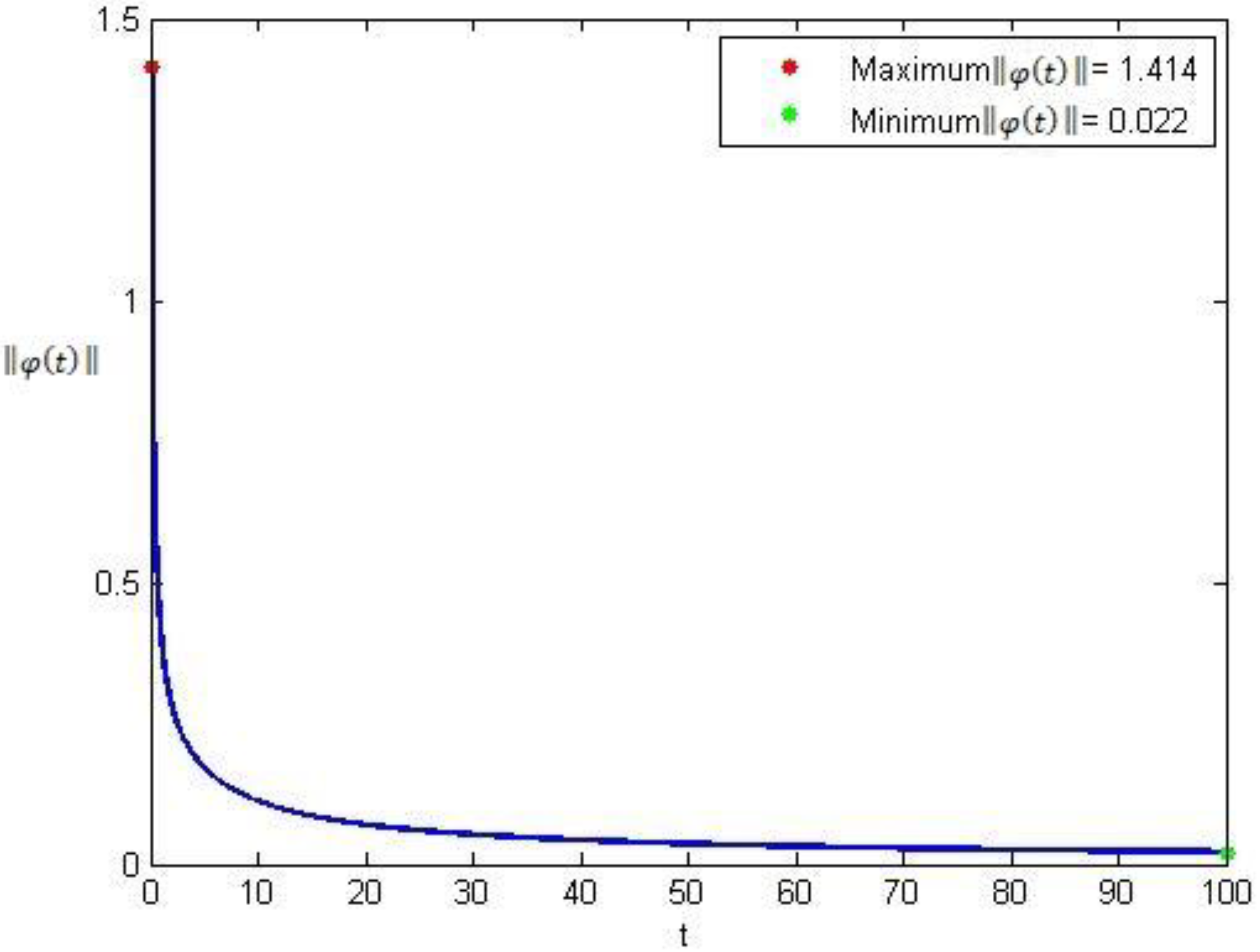
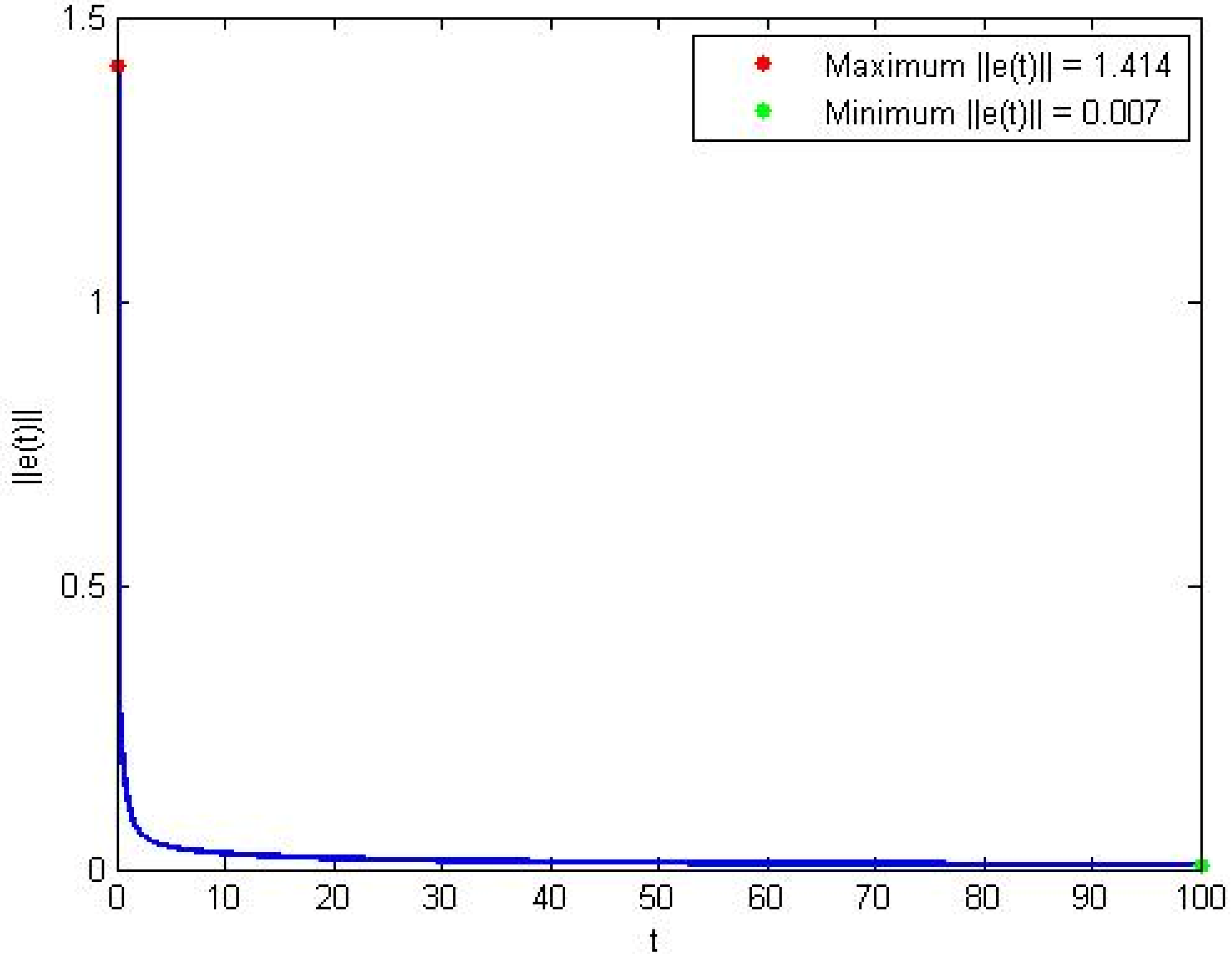
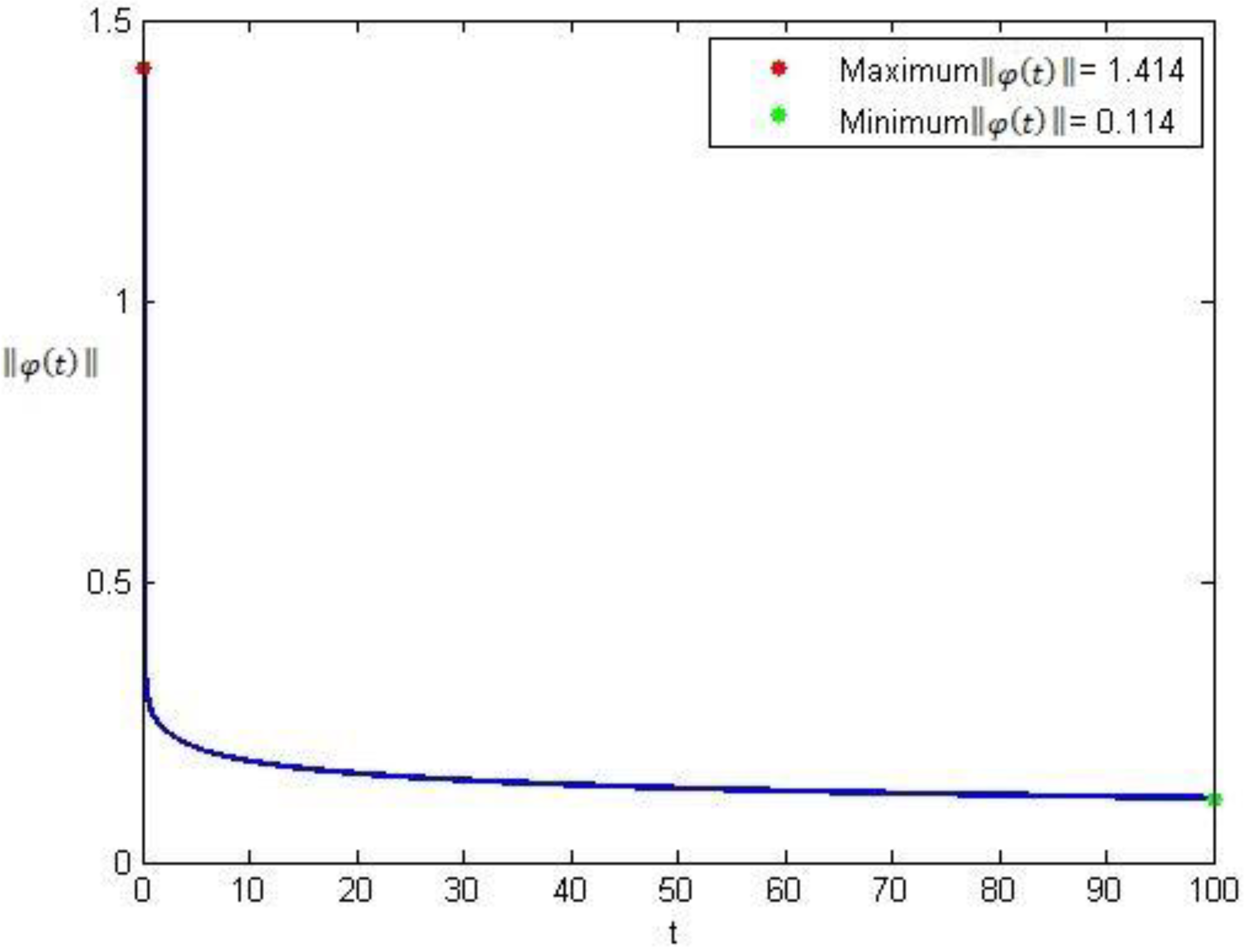
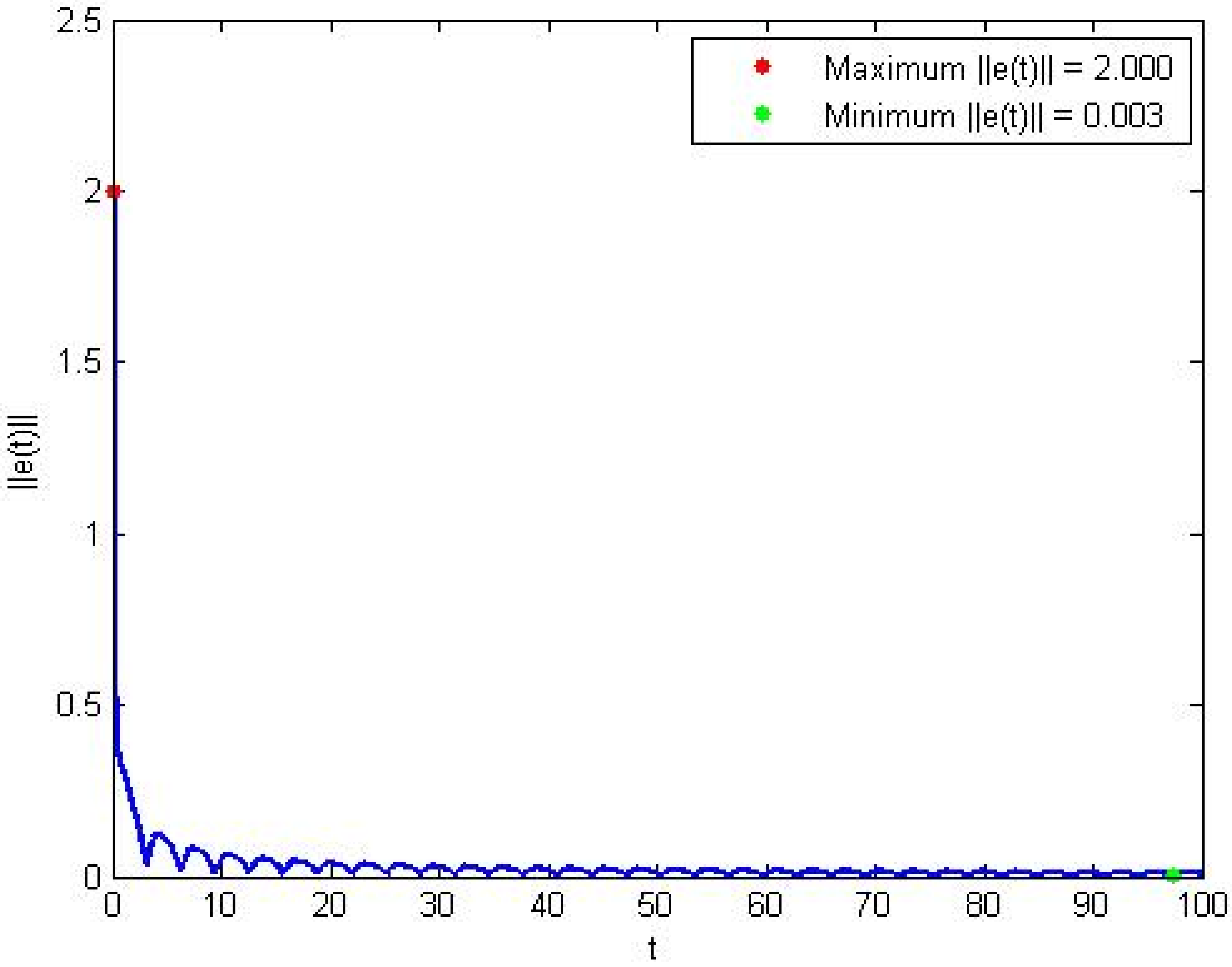
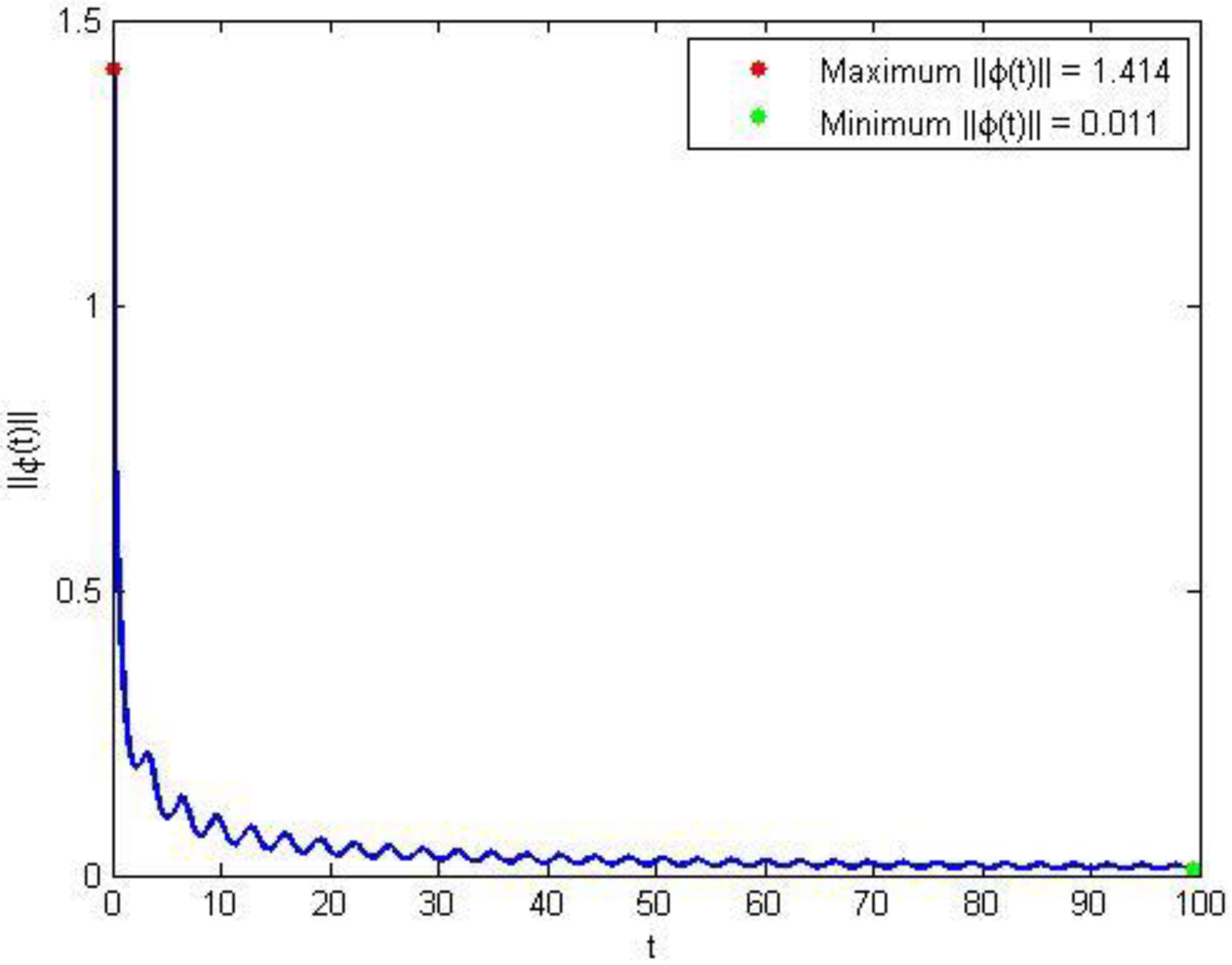
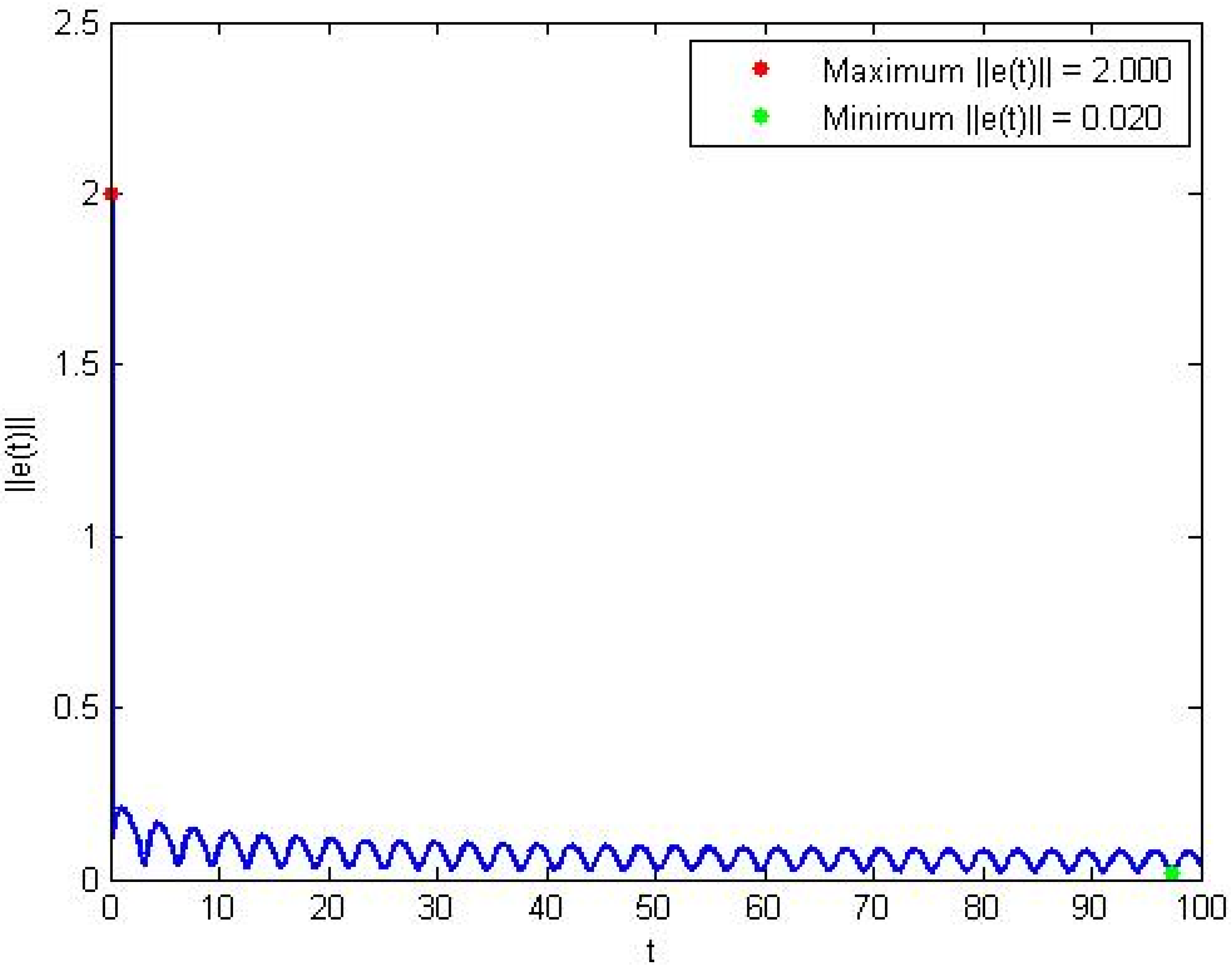
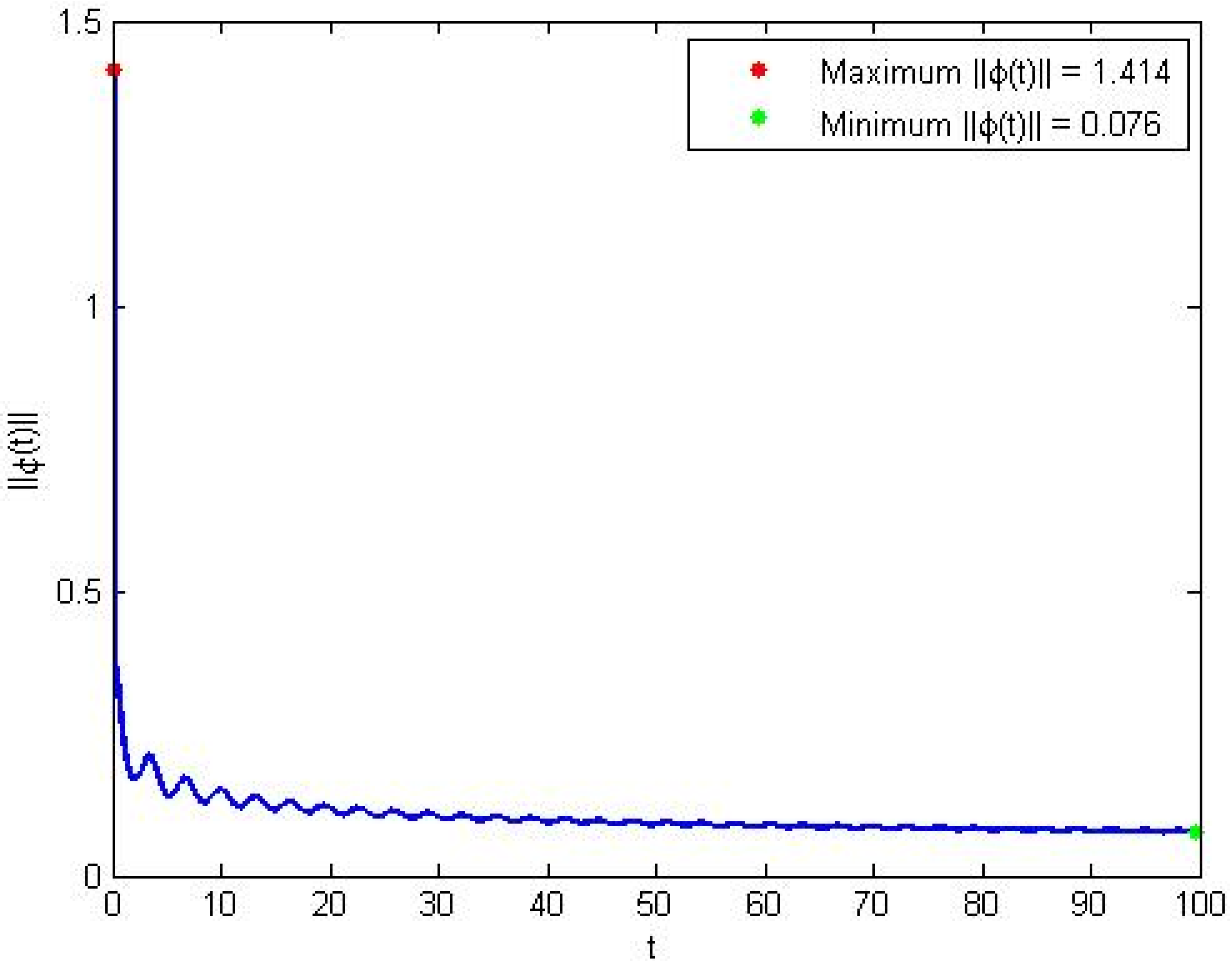
Let us consider a numerical example in the form of (7), where the actual parameter vector to be identified is and the measured vector is given by . The goal is to show the curves of the output error and the norm of the parameter identification error . For simulation, initial conditions of the estimated parameters are taken and . The first derivative parameter is chosen . For the second parameter, two cases are studied: and . After checking Figure 1, Figure 2, Figure 3 and Figure 4, one can note that and remain bounded (and this confirms our theoretical studies). Furthermore, if we consider another bounded information signal the simulation results given in Figure 5, Figure 6, Figure 7 and Figure 8 show that the theoretical results of Fractional Error Model 1 are satisfied for that choice of the chosen bounded information signal , i.e., the parameter error and the output error remain bounded for all t.
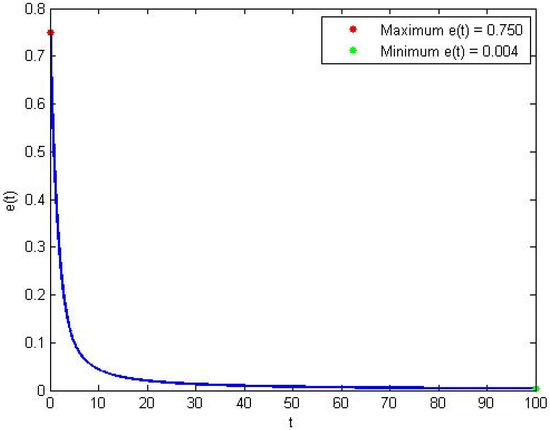
Figure 1.
for system (7), with and .
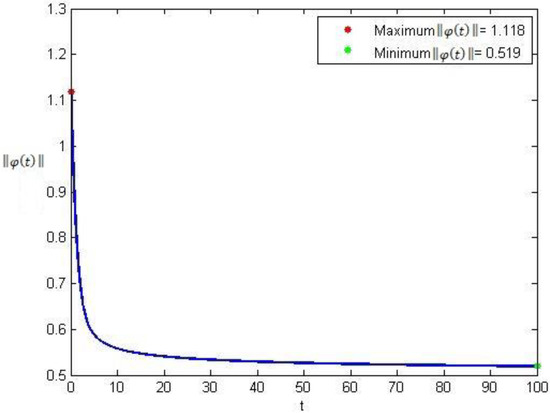
Figure 2.
for system (7), with , and .
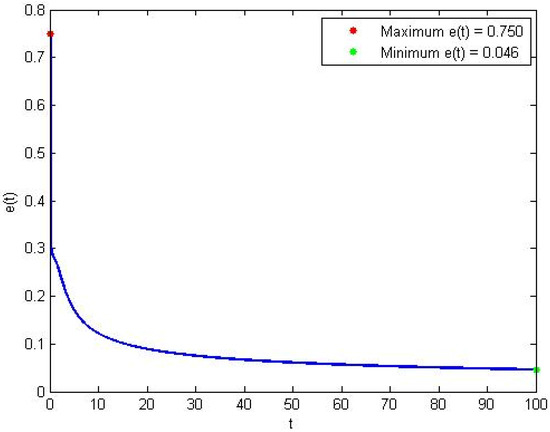
Figure 3.
for system (7), with , and .
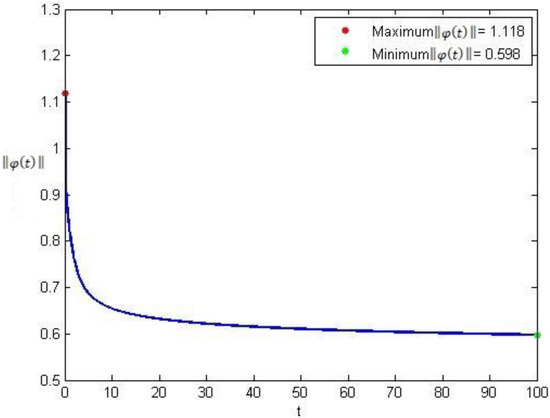
Figure 4.
for system (7), with , and .
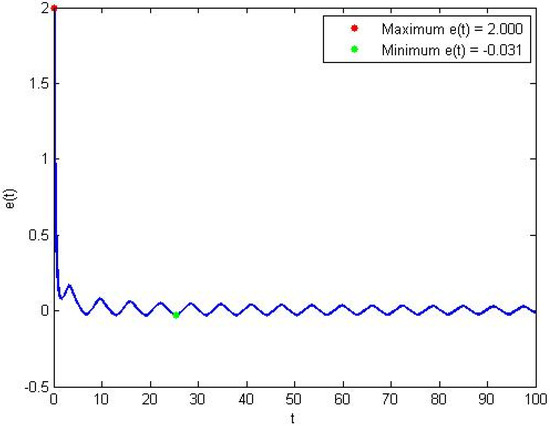
Figure 5.
for system (7), with , and .
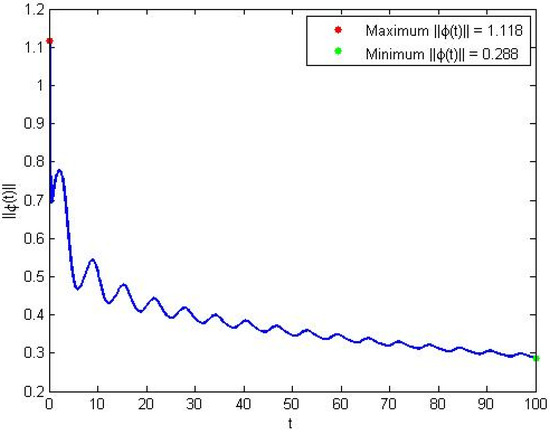
Figure 6.
for system (7), with , and .
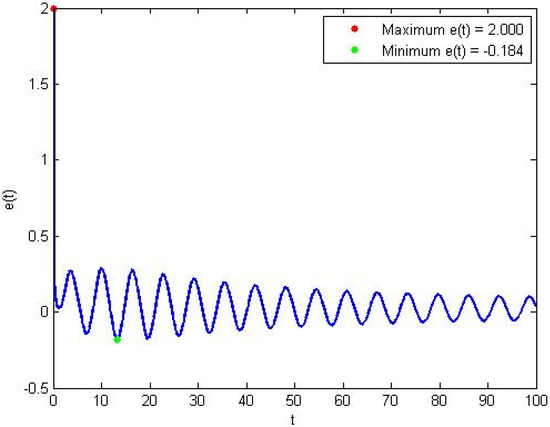
Figure 7.
for system (7), with , and .
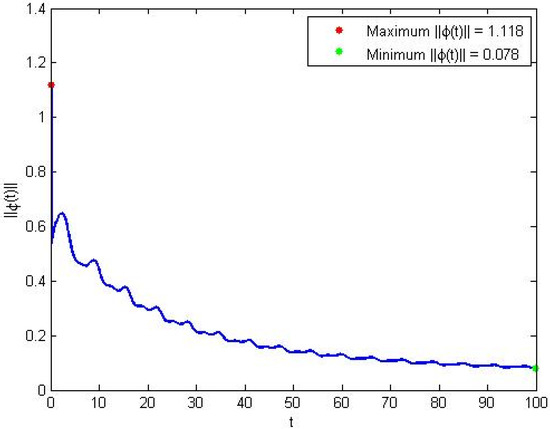
Figure 8.
for system (7), with , and .
4.2. Identification Using Fractional Error Model 1 with Parameter Constraints
4.2.1. Theoretical Study
In this sub-section, another identification problem is studied [29], where two adaptive systems related by a linear constraint are considered. In such a situation, we have two error models of type “1” representing these systems:
where , , , and are, respectively, the estimates of and , , . and are unknown but with known signs. In this study, the unknown parameters and are supposed to be related by the following matrix constraint:
where and are well known. In order to adjust the estimates and , taking into consideration the relation (11), we define the following intermediary equation [34]:
This equation can be rewritten otherwise, taking into consideration the errors: , , and :
Define the following Lyapunov function:
Using Lemma 1, the derivative of the Lyapunov function has the following upper bound:
Now, let us consider the following adaptive laws:
and then, from (15), one can have:
Inequality (20) means that is bounded for all . Thus, and are also bounded. Now, using (10) and (13), it follows that and are also bounded. Moreover, by integrating (20), one has
Then, , , and are bounded. Finally, by applying Lemma 2, we conclude that
Remark 3.
In relation with the parameter , two particular cases arise:
- : In this case, (21)–(23) reduce to the convergence in mean value of , , and , respectively.
- : This case corresponds to the classical Caputo derivative concept. An analogue study has been conducted for Caputo fractional systems in [35].
4.2.2. Simulation Study
In this sub-section, we consider a numerical simulation example, where the parameters to be identified are scalars, with the true values and . In this example, and , and and are assumed to be known such that . Here, the linear equation relating and is given by
In this case, the auxiliary equation (12) reduces to
The adaptive laws, in this case, are given by
The goal is to show the curves of the output errors norm and the parameter identification errors norm . For simulation, initial conditions of the estimated parameters are taken and . The first derivative parameter is chosen . For the second parameter, two cases are studied: and . Figure 5, Figure 6, Figure 7 and Figure 8 show that and remain bounded, which confirms our theoretical results. Furthermore, when we consider another bounded information signal the simulation results shown in Figure 9, Figure 10, Figure 11, Figure 12, Figure 13, Figure 14, Figure 15 and Figure 16 display that the theoretical results of Fractional Error Model 2 are satisfied, i.e., the parameter error and the output error remain bounded for all t.
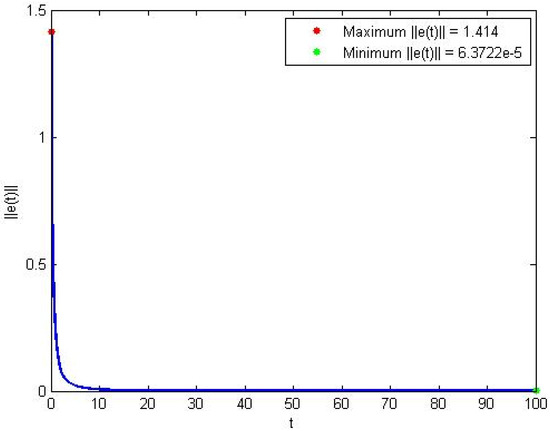
Figure 9.
for system (10), with , and .
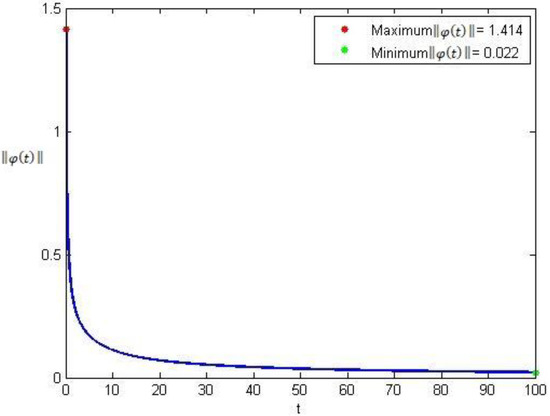
Figure 10.
for system (10), with , and .
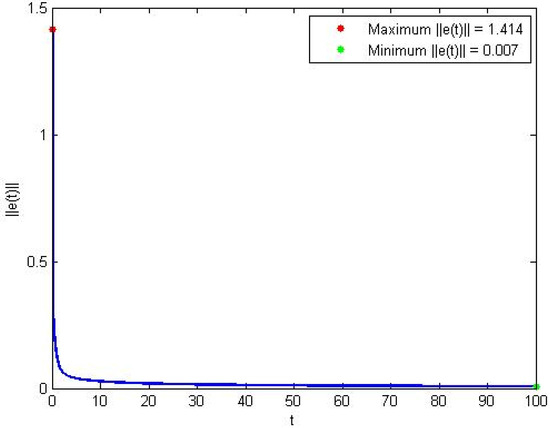
Figure 11.
for system (10), with , and .
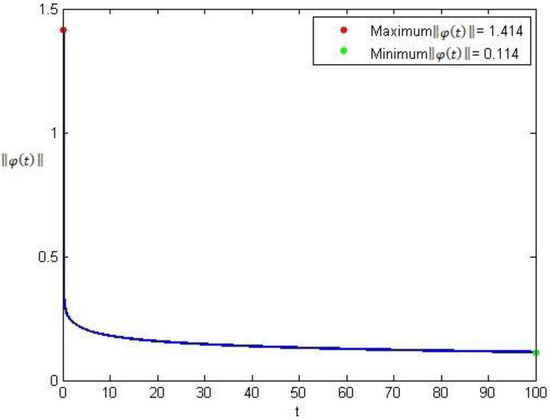
Figure 12.
for system (10), with , and .
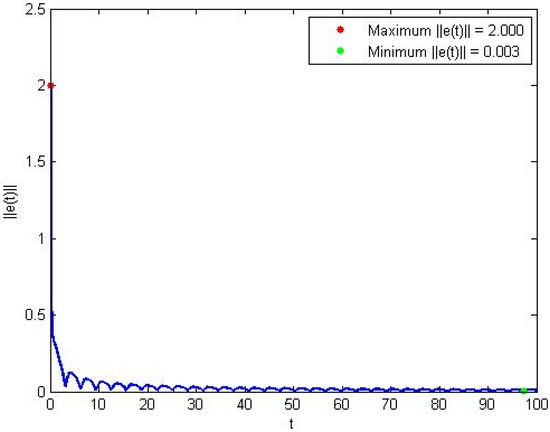
Figure 13.
for system (10), with , and .
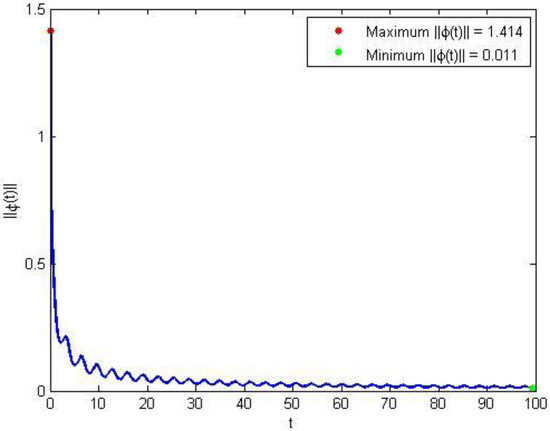
Figure 14.
for system (10), with , and .
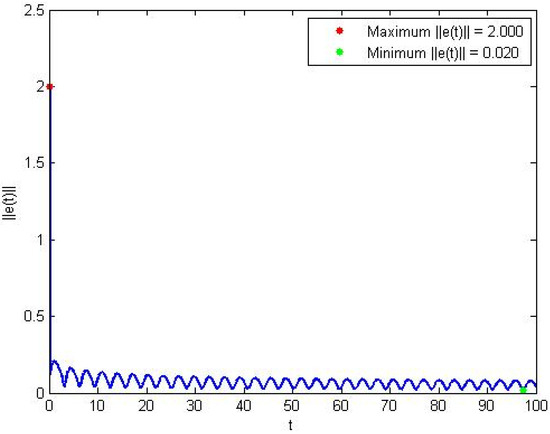
Figure 15.
for system (10), with , and .
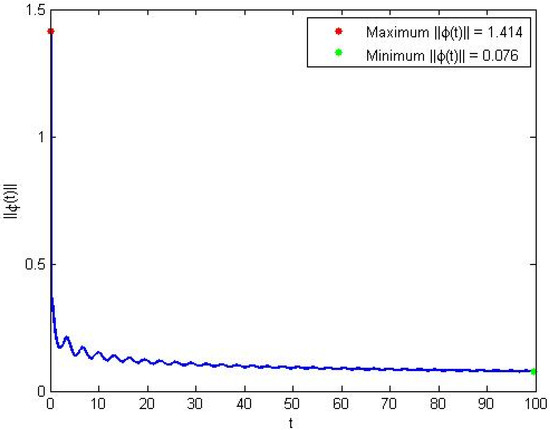
Figure 16.
for system (10), with , and .
5. Conclusions
In this paper, a new lemma for the analysis of Katugampola fractional-order systems has been presented and proven. This work treated the Caputo–Katugampola fractional derivative concept, which involves two parameters and . We have discussed the convergence of the solutions according to the parameter ρ. For the particular case , it simply reduces to the Caputo derivative definition. The really challenging thing in this work was the investigation of the solutions’ convergence as .
Then, that developed and proved lemma was exploited in studying adaptive schemes through investigating two identification problems. In both cases, the identification task was based on the so-called “fractional error models”, which are an extension of the classical “error models”. In the first identification scheme, a simple fractional error model was considered. In the second identification scheme, two adaptive systems were considered, and the so-called “Fractional Error Model 1 with parameter constraint” was used. Theoretical and numerical studies were provided for each identification scheme.
As for future perspectives related to this work, the authors aim to apply the results found herein to some real-world applications in order to further validate these findings analytically and experimentally.
Author Contributions
Conceptualization, A.J. and O.N.; methodology, O.K.; software, A.M.N.; validation, A.B.M., O.K. and A.J.; formal analysis, O.N.; investigation, A.B.M.; resources, A.J.; data curation, O.N.; writing—original draft preparation, O.K.; writing—review and editing, A.B.M.; visualization, A.M.N.; supervision, A.M.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Engheta, N. On fractional calculus and fractional multipoles in electromagnetism. IEEE Trans. Antennas Propag. 1996, 44, 554–566. [Google Scholar] [CrossRef]
- Laskin, N. Fractional market dynamics. Phys. A Stat. Mech. Its Appl. 2000, 287, 482–492. [Google Scholar] [CrossRef]
- Boutiara, A.; Etemad, S.; Alzabut, J.; Hussain, A.; Subramanian, M.; Rezapour, S. On a nonlinear sequential four-point fractional q-difference equation involving q-integral operators in boundary conditions along with stability criteria. Adv. Differ. Equ. 2021, 2021, 367. [Google Scholar] [CrossRef]
- Boutiara, A.; Benbachir, M. Existence and uniqueness results to a fractional q-difference coupled system with integral boundary conditions via topological degree theory. Int. J. Nonlinear Anal. Appl. 2022, 13, 3197–3211. [Google Scholar]
- Boutiara, A.; Abdo, M.S.; Alqudah, M.A.; Abdeljawad, T. On a class of Langevin equations in the frame of Caputo function-dependent-kernel fractional derivatives with antiperiodic boundary conditions. AIMS Math. 2021, 6, 5518–5534. [Google Scholar] [CrossRef]
- Jmal, A.; Naifar, O.; Ben Makhlouf, A.; Derbel, N.; Hammami, M.A. Robust sensor fault estimation for fractional-order systems with monotone nonlinearities. Nonlinear Dyn. 2017, 90, 2673–2685. [Google Scholar] [CrossRef]
- Adjimi, N.; Boutiara, A.; Abdo, M.S.; Benbachir, M. Existence results for nonlinear neutral generalized Caputo fractional differential equations. J. Pseudo-Differential Oper. Appl. 2021, 12, 1–17. [Google Scholar] [CrossRef]
- Suwan, I.; Abdo, M.; Abdeljawad, T.; Mater, M.; Boutiara, A.; Almalahi, M. Existence theorems for ψ-fractional hybrid systems with periodic boundary conditions. AIMS Math. 2021, 7, 171–186. [Google Scholar] [CrossRef]
- Jmal, A.; Naifar, O.; Ben Makhlouf, A.; Derbel, N.; Hammami, M.A. Observer-based model reference control for linear fractional-order systems. Int. J. Digit. Signals Smart Syst. 2018, 2, 136–149. [Google Scholar] [CrossRef]
- Katugampola, U.N. New approach to a generalized fractional integral. Appl. Math. Comput. 2011, 218, 860–865. [Google Scholar] [CrossRef] [Green Version]
- Katugampola, U.N. A new approach to generalized fractional derivatives. Bull. Math. Anal. Appl. 2014, 6, 1–15. [Google Scholar]
- Katugampola, U.N. Existence and uniqueness results for a class of generalized fractional differential equations. arXiv 2014, arXiv:1411.5229. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.H.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Almeida, R. Variational Problems Involving a Caputo-Type Fractional Derivative. J. Optim. Theory Appl. 2016, 174, 276–294. [Google Scholar] [CrossRef]
- Sene, N.; Gómez-Aguilar, J.F. Analytical solutions of electrical circuits considering certain generalized fractional derivatives. Eur. Phys. J. Plus 2019, 134, 260. [Google Scholar] [CrossRef]
- Karkhane, M.; Pourgholi, M. Adaptive observer design for one sided Lipschitz class of nonlinear systems. Modares J. Electr. Eng. 2015, 11, 45–51. [Google Scholar]
- Naifar, O.; Boukettaya, G.; Ouali, A. Global stabilization of an adaptive observer-based controller design applied to induction machine. Int. J. Adv. Manuf. Technol. 2015, 81, 423–432. [Google Scholar] [CrossRef]
- Tao, G. A simple alternative to the Barbalat lemma. IEEE Trans. Autom. Control 1997, 42, 698. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A. Boundedness of the solutions for certain classes of fractional differential equations with application to adaptive systems. ISA Trans. 2016, 60, 82–88. [Google Scholar] [CrossRef]
- Souahi, A.; Naifar, O.; Ben Makhlouf, A.; Hammami, M.A. Discussion on Barbalat Lemma extensions for conformable fractional integrals. Int. J. Control 2017, 92, 234–241. [Google Scholar] [CrossRef]
- Liu, D.Y.; Laleg-Kirati, T.M.; Gibaru, O.; Perruquetti, W. Identification of fractional order systems using modulating functions method. In Proceedings of the American Control Conference (ACC), Washington, DC, USA, 17–19 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1679–1684. [Google Scholar]
- Yuan, L.-G.; Yang, Q.-G. Parameter identification and synchronization of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 305–316. [Google Scholar] [CrossRef]
- Narendra, K.S.; Annaswamy, A.M. Stable Adaptive Systems; Dover Publications Inc.: Mineola, NY, USA, 2005. [Google Scholar]
- Duarte-Mermoud, A.M.; Aguila-Camacho, N. Some Useful Results in Fractional Adaptive Control. In Proceedings of the Sixteenth Yale Workshop on Adaptive and Learning Systems, New Haven, CT, USA, 5–7 June 2013; pp. 51–56. [Google Scholar]
- Almeida, R.; Malinowska, A.B.; Odzijewicz, T. Fractional Differential Equations with Dependence on the Caputo–Katugampola Derivative. J. Comput. Nonlinear Dyn. 2016, 11, 061017. [Google Scholar] [CrossRef] [Green Version]
- Baleanu, D.; Wu, G.-C.; Zeng, S. Chaos analysis and asymptotic stability of generalized Caputo fractional differential equations. Chaos Solitons Fractals 2017, 102, 99–105. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A. Fractional error model 1 in adaptive systems. In Proceedings of the IEEE International Conference on Fractional Differentiation and Its Applications (ICFDA), Catania, Italy, 23–25 June 2014; pp. 1–5. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A. Improved adaptive laws for fractional error models 1 with parameter constraints. Int. J. Dyn. Control 2016, 5, 198–207. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Narendra, K.S. Error models with parameter constraints. Int. J. Control 1996, 64, 1089–1111. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef]
- Chen, J.; Tepljakov, A.; Petlenkov, E.; Chen, Y.; Zhuang, B. Boundary Mittag-Leffler stabilization of coupled time fractional order reaction–advection–diffusion systems with non-constant coefficients. Syst. Control Lett. 2021, 149, 104875. [Google Scholar] [CrossRef]
- Coca, D.; Billings, S.A. Direct parameter identification of distributed parameter systems. Int. J. Syst. Sci. 2000, 31, 11–17. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, J.; Lü, J.; Parlitz, U. Parameter identification of dynamical systems from time series. Phys. Rev. E 2007, 75, 067201. [Google Scholar] [CrossRef]
- Pillai, D.S.; Rajasekar, N. Metaheuristic algorithms for PV parameter identification: A comprehensive review with an application to threshold setting for fault detection in PV systems. Renew. Sustain. Energy Rev. 2018, 82, 3503–3525. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).