Abstract
Stochastic robustness of discrete noises has already been proposed and studied in the previous work. Nevertheless, the significant phenomenon of delays is left in the basket both in the deterministic and the stochastic parts of the considered equation by the existing work. Stimulated by the above, this paper is devoted to studying the stochastic robustness issue of delayed discrete noises for delay differential equations, including the issues of robust stability and robust boundedness.
Keywords:
robust boundedness; robust stability; delayed discrete noises; delay differential equations MSC:
37H10; 93E15
1. Introduction
Stochastic differential equations (SDEs) have been universally modeled to describe a great deal of real phenomena along with stochastic factor (e.g., [1,2,3,4,5]). Time delays are a significant and unavoidable factor for the reality. Thus, the stochastic delay differential equations (SDDEs) are well established with serial emphases on the asymptotic behavior; please refer to related Refs. [5,6,7,8,9,10] and the references therein. Generally, an SDDE
can be regarded as the stochastically perturbed system of deterministic delay differential equation (DDE) , where maps from to maps from to , are time-varying delays, is a Brownian motion. Then, one must face the significant scheme of stochastic robustness: when this deterministic DDE is bounded/stable, how much stochastic perturbation can be tolerated without the lost of boundedness/stability? One is referred to as stochastic robust boundedness, and the other as stochastic robust stability.
So far, there are serial assertions on asymptotic boundedness of SDDEs (e.g., [5,11,12,13,14]), but few assertions on stochastic robust boundedness are obtained. The pioneer work on stochastic robust boundedness was [15], which was further developed to functional case by [16]. Different from stochastic robust boundedness, many more assertions have been poured into the scheme of stochastic robust stability. On this topic, one can refer to Refs. [15,17,18,19,20,21,22] and the references therein.
It should be noted that, in almost all of the above assertions on stochastic robustness, stochastic perturbations were based on continuous states observations. Stimulated by Ref. [23], Feng and his coauthors [24] firstly proposed and studied the scheme of stochastic robustness of discrete stochastic perturbations. Speaking in detail, for a bounded/stable deterministic differential equation
discrete stochastic noise can be tolerated to keep the properties of boundedness/stability, where maps from to maps from to , stands for the time interval of two consecutive observations, and stands for the biggest integer not greater than a. However, two aspects need to be further studied for Ref. [24], which are listed as follows:
(1) The underlying system considered by Ref. [24] is just the deterministic differential equations. In reality, the time delays phenomenon is widespread, which is always the source of instability and other dreadful behavior. Thus, it is necessary to consider deterministic differential equations with delays, particularly with time-varying delays [25]. This is the first goal of our paper.
(2) Stochastic perturbation in Ref. [24] was mainly based on discrete states observations at serial times . Nevertheless, when observing the system states to make some estimations, time delays are unavoidable (e.g., data transmission). That is to say, making the observations not only needs to consider the discrete issue but also the delay issue. Hence, stochastic perturbations dependent on delayed discrete states observations (e.g., ) are more reasonable and practical than that in Ref. [24], where is a designed delay. Furthermore, studying the stochastic robustness issue of delayed discrete noises is necessary and significant, which is the second goal of our paper.
Motivated by the aforesaid aspects, this paper is devoted to studying the issue of stochastic robustness (including robust boundedness, robust stability, robust asymptotic stability, and robust exponential stability) of delayed discrete noises for deterministic delay differential equations. So far, this paper is the first study on the stochastic robustness of delayed discrete noises, which makes up for the gap in this field.
Notations:
: positive numbers.
: the set of continuous functions with the norm .
: positive time-varying delay with the boundedness and derivative .
: the trace norm of vector or matrix A.
: a complete probability space satisfying usual conditions.
: an m-dimensional Brownian motion defined on .
: the set of functions with the continuity, twice differentiability about u, and once differentiability about t.
2. Problem Statement
An n-dimensional DDE
is concerned with initial value , where maps from to with the local Lipschitz condition (LLC) and , . The following condition is assumed for to ensure the boundedness and stability of DDE (1).
Assumption 1.
There are constants , , , satisfying and
Remark 1.
Under Assumption A1 and some other conditions, DDE (1) is bounded and stable. For example, choosing Lyapunov function , we can prove the stability and asymptotic stability of DDE (1) similarly to the proof of Theorem 1 with ; Choosing Lyapunov function , we can prove the exponential stability of DDE (1) similarly to the proof of Theorem 2 with and the asymptotic boundedness similarly to the proof of Theorem 3 with . The detailed proofs are left to readers.
As mentioned above, we will study the stochastic robustness of delayed discrete noise satisfying the LLC and following Assumption A2 for DDE (1) in this section, where stands for the time interval of two consecutive observations, stands for the time interval between the system arrival instant and the observed instant.
Assumption 2.
There are constants , satisfying,
and
In other words, the goal is to give the criteria on , and such that stochastically perturbed system
retains the properties of boundedness or stability.
Remark 2.
Under Assumption 2, is the equilibrium solution of system (4). In addition, system (4) can be rewritten as
where . Hence, essentially speaking, three types of delays exist for system (4): time-varying delay , with the differentiability, is self-contained for (4); time-varying delay , without the differentiability, is natural interval between current instant t and observation instant ; constant delay is intentionally designed. For the three types of delays, the property analyses are complex.
It is noted that from Remark 2. Hence, system (4) is essentially an SDDE with bounded delays, and the global solution can be ensured for system (4) with () by Theorem 3.2 of Ref. [5], Assumptions 1 and 2.
For SDDE (4), the initial values are required. When , it is okay. Otherwise, we need to give the values on . Hence, it is assumed that and .
Lemma 1
(Barbalat Lemma). Assume that is uniformly continuous on with , then .
3. Robust Stability
In this part, we will study the issue of stochastic robust stability of delayed discrete noises, which is one of the main goals.
Theorem 1.
Under Assumptions 1 and 2 with , if there exist constants and satisfying
and
then, solution of SDDE (4) is moment stable and moment asymptotic stable, i.e.,
where with represent the two solutions of
Please see the detailed proof of Theorem 1 in Appendix A.
Remark 3.
Theorem 1 has studied the stability and asymptotic stability of SDDE (4), but it does not consider the convergent rate. In the following, it will be studied.
Theorem 2.
Under the conditions of Theorem 1, the solution of SDDE (4) is moment exponentially stable and almost surely exponentially stable, i.e.,
where , and represents the positive solution of
Please see the detailed proof of Theorem 2 in Appendix B.
Remark 4.
It is noted that is monotonically increasing. Hence, from the definition of and , we have for . Furthermore, from the definition of , we have for .
Furthermore, the following assertion, as the applications of obtained assertions (i.e., Theorems 1 and 2), can be proposed.
4. Robust Boundedness
In the above section, under Assumptions 1 and 2 with , the scheme of robust stability of delayed discrete noises, in means of stability, asymptotic stability and exponential stability, has been studied. Then, without the constraint of , what assertions can be obtained? That is the goal of this part, i.e., the scheme of robust boundedness of delayed discrete noises.
Theorem 3.
Under Assumptions 1 and 2, if there exist constants , and satisfying
and
then, solution of SDDE (4) is asymptotically bounded, i.e.,
where the expression of is given in the proof, , , represents the positive solution of
and with represent the two solutions of
Please see the detailed proof of Theorem 3 in Appendix C.
Remark 5.
Remark 6.
Similarly to Remark 4, from the monotonically increasing property of , the definitions of , and , we have for and even for .
Similarly to Corollary 1, the assertion on the robust stability can be yielded.
Corollary 2.
Remark 7.
Compared with the obtained assertions on stochastic robustness in Refs. [15,16,17,18,19,20,21,22], the novelty and significance of our theory are as follows.
(1) Stochastic perturbations here are based on delayed discrete states observations rather than continuous states observations in Refs. [15,16,17,18,19,20,21,22];
5. An Example
Example
See the 1-dimensional DDE
with initial value , where , c is a constant.
Here, we mainly study the stochastic robustness of delayed discrete noise for DDE (22), where . Calculations yield that and .
When , it is easily shown that DDE (22) is asymptotically stable (see Figure 1). For and , we can take parameters with such that conditions (7)–(9) hold. Calculations yield that . Hence, by [5], Theorem 1, and Theorem 2, the stochastically perturbed system
has a global solution and
which can be verified by Figure 2.
which can be verified by Figure 3.
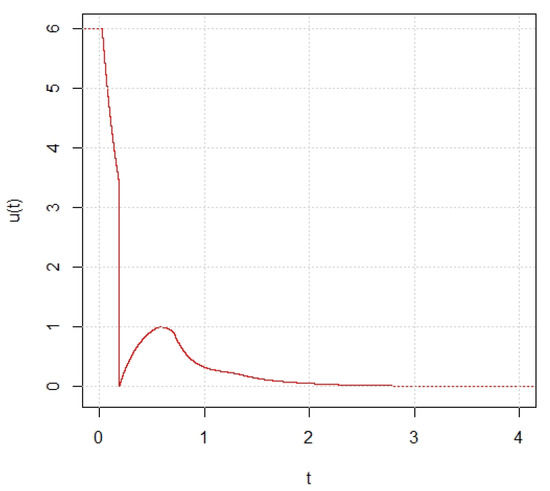
Figure 1.
Trajectory of for DDE (22) with .
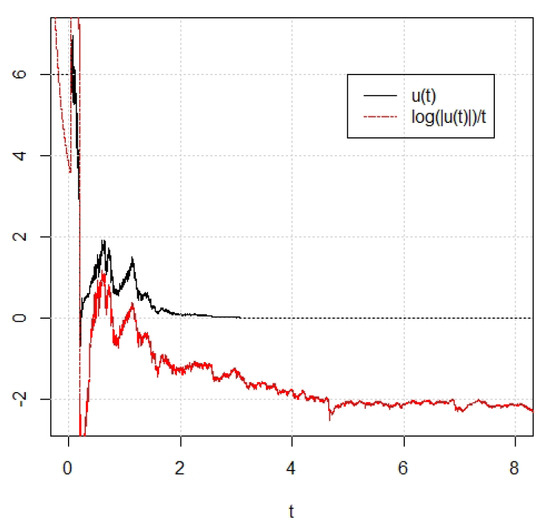
Figure 2.
Stochastic trajectories of , for system (23) with .
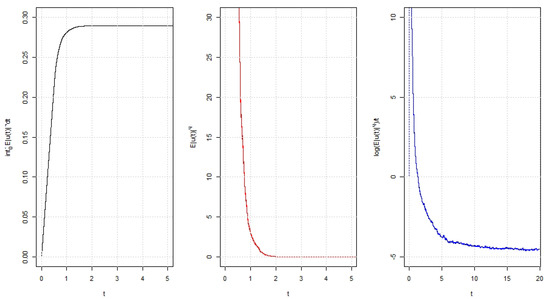
Figure 3.
, for system (23) with and sample size 200.
When , it is also shown that DDE (22) is asymptotically bounded (see Figure 4). For , , and , we can take parameters with , such that conditions (16)–(18) hold. Calculations yield that . Hence, by [5] and Theorem 3, the solution of stochastically perturbed system (23) has
which can be verified by Figure 5.
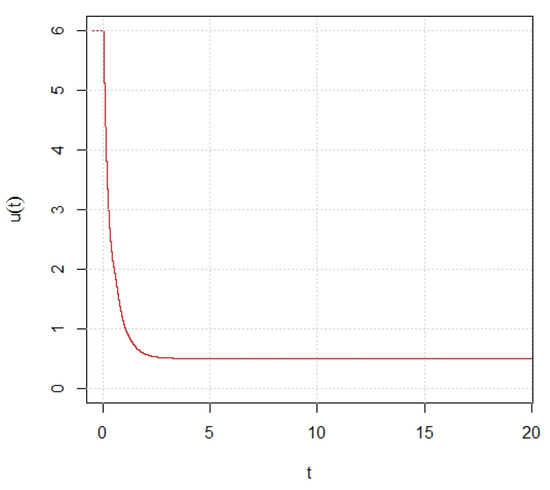
Figure 4.
Trajectory of for DDE (22) with .
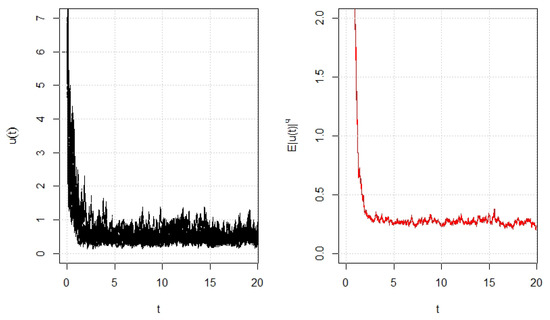
Figure 5.
Trajectories of and for system (23) with and sample size 200.
6. Conclusions
This paper mainly studies the stochastic robustness, including the issues of robust stability and robust boundedness, of delayed discrete noises for deterministic DDEs with time-varying delays, which makes up for the gap of stochastic robustness. In our theory, it is necessary to design parameters and together. However, designing these two parameters independently is more reasonable, which will be our future work.
Author Contributions
Conceptualization, M.O.A. and J.C.; Investigation, F.E.A., L.F. and R.M.A.; Methodology, F.E.A., L.F., M.O.A. and A.M.A.; Supervision, J.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Deputyship for Research and Innovation, Ministry of Education in Saudi Arabia (IFPRC-035-611-2020).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors extend their appreciation to the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number (IFPRC-035-611-2020) and King Abdulaziz University, DSR, Jeddah, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Proof of Theorem 1
Proof.
The global solution has been ensured. For integer , set where sufficiently large positive constant . Obviously, is increasing and . Let .
Write , as , for short, respectively. Let
where .
Calculations show that
where .
Compute the Itô’s operator to and obtain that
Then, we have that
It is noted that, from Burkholder–Davis–Gundy inequality, ,
and that, ,
Appendix B. Proof of Theorem 2
Proof.
Notations in the proof of Theorem 1 are still employed. The definition of and inequality (8) can ensure that there is such that and . Let
where .
Similarly to (A3), it shows that
Please see the meaning of as above.
Compute the Itô’s operator to , then
Hence, the assertion (13) is obtained, as and .
References
- Arnold, L. Stochastic Differential Equations: Theory and Applications; John Wily and Sons: New York, NY, USA, 1974. [Google Scholar]
- Khasminskii, R. Stochastic Stability of Differential Equations; Sijthoff & Noordhoff: San Francisco, CA, USA, 1980. [Google Scholar]
- Karatzas, I.; Shreve, S.E. Brownian Motion and Stochastic Calculus; Springer: New York, NY, USA, 1988. [Google Scholar]
- Oksendal, B. Stochastic Diffrential Equations, 6th ed.; Springer: New York, NY, USA, 2003. [Google Scholar]
- Mao, X. Stochastic Differential Equations and Applications, 2nd ed.; Horwood Publishing: Chichester, UK, 2007. [Google Scholar]
- Appleby, J.A.D.; Riedle, M. Almost sure asymptotic stability of stochastic Volterra integro-differential equations with fading perturbations. Stoch. Anal. Appl. 2006, 24, 813–826. [Google Scholar] [CrossRef]
- Shaikhet, L. Stability of equilibrium states of a nonlinear delay differential equation with stochastic perturbations. Int. J. Robust Nonlinear Control 2017, 27, 915–924. [Google Scholar] [CrossRef]
- Song, R.; Zhu, Q. Stability of linear stochastic delay differential equations with infinite Markovian switchings. Int. J. Robust Nonlinear Control 2018, 28, 825–837. [Google Scholar] [CrossRef]
- Feng, L.; Li, S.; Song, R.; Li, Y. Suppression of explosion by polynomial noise for nonlinear differential systems. Sci. China Inf. Sci. 2018, 61, 070215. [Google Scholar] [CrossRef]
- Feng, L.; Liu, L.; Cao, J.; Rutkowski, L.; Lu, G. General decay stability for nonautonomous neutral stochastic systems with time-varying delays and Markovian switching. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Shen, Y.; Jiang, F. The almost sure asymptotic stability and pth moment asymptotic stability of nonlinear stochastic differential systems with polynomial growth. IEEE Trans. Autom. Control 2011, 56, 1985–1990. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Su, H.; Wang, K. Asymptotic boundedness for stochastic coupled systems on networks with Markovian switching. Neurocomputing 2014, 136, 180–189. [Google Scholar] [CrossRef]
- Peng, S.; Yang, L. The pth moment boundedness of stochastic functional differential equations with Markovian switching. J. Frankl. Inst. 2017, 354, 345–359. [Google Scholar] [CrossRef]
- Xu, L.; Hu, H. Boundedness analysis of stochastic pantograph differential systems. Appl. Math. Lett. 2021, 111, 106630. [Google Scholar] [CrossRef]
- Hu, L.; Mao, X.; Zhang, L. Robust stability and boundedness of nonlinear hybrid stochastic differential delay equations. IEEE Trans. Autom. Control 2013, 58, 2319–2332. [Google Scholar] [CrossRef]
- Feng, L.; Li, S.; Liu, Z.; Zheng, S. Robust stability of a class of stochastic functional differential equations with Markovian switching. Adv. Differ. Equ. 2016, 2016, 205. [Google Scholar] [CrossRef][Green Version]
- Haussmann, U.G. Asymptotic stability of the linear Itô equation in infinite dimensions. J. Math. Anal. Appl. 1978, 65, 219–235. [Google Scholar] [CrossRef]
- Ichikawa, A. Stability of semilinear stochastic evolution equations. J. Math. Anal. Appl. 1982, 90, 12–44. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, F.; Huang, C. Robustness of exponential stability of a class of stochastic functional differential equations with infinite delay. Automatica 2009, 45, 2577–2584. [Google Scholar] [CrossRef]
- Wu, F.; Hu, S. Attraction, stability and boundedness for stochastic functional differential equations with infinite delay. Automatica 2011, 47, 2224–2232. [Google Scholar] [CrossRef]
- Zhu, F.; Han, Z.; Zhang, J. Robust stability and stabilization of linear stochastic systems with Markovian switching and uncertain transition rates. J. Math. Anal. Appl. 2014, 415, 677–685. [Google Scholar] [CrossRef]
- Fei, C.; Shen, M.; Fei, W.; Mao, X.; Yan, L. Stability of highly nonlinear hybrid stochastic integro-differential delay equations. Nonlinear Anal. Hybrid Syst. 2019, 415, 180–199. [Google Scholar] [CrossRef]
- Mao, X. Almost sure exponential stabilization by discrete-time stochastic feedback control. IEEE Trans. Autom. Control 2016, 61, 1619–1624. [Google Scholar] [CrossRef]
- Feng, L.; Cao, J.; Liu, L. Robust analysis of discrete time noises for stochastic systems and application in neural networks. Int. J. Control 2020, 93, 2908–2921. [Google Scholar] [CrossRef]
- Briat, C. Linear Parameter-Varying and Time-Delay Systems; Springer: Heidelberg, Germany, 2015. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).