Abstract
We analyze wave equation for spatially one-dimensional continuum with constitutive equation of non-local type. The deformation is described by a specially selected strain measure with general fractional derivative of the Riesz type. The form of constitutive equation is assumed to be in strain-driven type, often used in nano-mechanics. The resulting equations are solved in the space of tempered distributions by using the Fourier and Laplace transforms. The properties of the solution are examined and compared with the classical case.
Keywords:
wave propagation; general fractional derivative of Riesz type; fractional differential equations MSC:
74J05; 34K37; 46F12
1. Introduction
Differential equations of fractional orders appear in many branches of physics and mechanics. There are numerous solutions to concrete problems collected in the books [,,,,,], for example. Fractional derivatives (FDs) are non-local operators, and, in most applications in mechanics, fractional derivatives, when the independent coordinate is time, are used to model the dissipation and/or memory in the system. If FDs are used to describe memory, physically they represent the (fading) memory of the system. However, when spatial coordinates are used as independent variables, the fractional derivatives model non-local action. As is well known in nano-materials, the non-local action (see []) is an important phenomenon that is used to explain many properties that are characteristic of such materials. In solid mechanics in general, and non-local and nano-mechanics in particular, there are two types of constitutive equations that are used: strain- and stress-driven constitutive equations. In the strain-driven form of constitutive equation, that we use in this work, the stress is determined by action of a non-local operator on strain. In this work we shall formulate relevant equations for the spatially one-dimensional body with a linear constitutive equation in a specially selected deformation measure (strain) that is non-local. The use of a general fractional derivative of a displacement field in the form of the so-called truncated power-law kernel (see []) is the novelty that we propose here. After we formulate the problem in distributional setting, we shall study some special motions, with the emphasis on wave propagation with or without body forces.
2. Mathematical Model
Consider a rod with straight axis. Let x be a coordinate coinciding with the rod axis. Suppose that the rod occupies a part of the space for which , with We state the definitions of the left and right general fractional derivative (GFD) of the Caputo type (see [,]). Throughout, we assume The left GFD derivative of the Caputo type of order is defined as
where is Euler’s gamma function and y is assumed to be absolutely continuous, i.e.,
In writing (1) we used specific kernel suggested for application in continuum mechanics; see [], p. 6. The kernel is called the truncated power-law kernel and was used earlier for the study of anomalous diffusion in [] (Equation (2.35)), [] (Equation (13)) and in [] (Equation (10)) as a friction kernel for the study of lipid motion in a lipid bilayer system. Similarly, the right GFD derivative of the Caputo type of order with is defined as
Equation (3) is written as
Before we define a new deformation measure, we state the classical strain tensor of linear elasticity (see []) that for the three-dimensional body reads
In (5), we denoted by , components of the displacement vector with respect to a prescribed Cartesian coordinate system with axes Also, we use t to denote time. Since here we consider one-dimensional bodies only, (5) becomes
Here is the only non-zero component of displacement vector. Also, is the axis coinciding with the rod axis. Instead of (6), we shall use the following deformation measure
In (7) we used defined by (4). Also, the derivatives are taken with respect to We assume that the displacement field is absolutely continuous in the variable x (absolutely continuous, i.e., . In this case, (1) and (2) exist and
with , exists too. The deformation measure, or strain, is non-local. Actually takes values of the classical strain at all points of the body, with the weighting function equal to .
Remark 1.
Next we propose the constitutive equation of the rod. We assume that it is given in strain-driven form, so that with (7) the linear stress-deformation measure relation becomes
where is the stress and is a constant (generalized modulus of elasticity). We consider several special cases of (8).
- is the strain measure used in [];
- , since ;
- is the Riesz type of derivative for the Caputo–Fabrizio fractional derivativeif we take and add the constant in front [,].
Suppose that we assume that the displacement field is given as , with being arbitrary. This represents the rigid body motion along the axis of the body. Then
Therefore, we conclude that the rigid body motion of the rod, i.e., , with being arbitrary, leads to zero strain. This shows that can be used as a strain measure. Now we analyze the general problem of motions that result in strain given by (7), that is equal to zero. To do this, we examine the solution to the equation in general. We consider
The next Lemma summarizes the result.
Lemma 1.
For the only solution to (9) for , , is
Proof.
Let be a function defined as
Since (10) is an equation represented by convolution of two elements from the space of tempered distribution, one of which is with compact support, we analyze (10) in the space of tempered distribution Let be a regular distribution defined by is with the compact support. Distribution defined by is in Consequently, the convolution
exists. We now apply the Fourier transform to (10). Firstly, we have, see [], p. 346,
where
Since is an entire function in from (13) and the uniqueness theorem for the Fourier transform we conclude that if or a.e. Thus, □
Equation of motion is
where f denotes the prescribed body forces and denotes density. We take body force in the form of friction force, proportional to the Caputo fractional derivative of displacement with respect to time, i.e.,
with The form of the body force is taken to be proportional to the Caputo fractional derivative of displacement in order to be able to model viscous force and purely elastic resistance force Then, the equation of motion becomes
To (17), we prescribe the following initial condition
Remark 2.
Note that
where
is modified Riesz potential (cf. []). It reduces to the classical Riesz potential for
3. Notations
In this Section, we present definitions that we shall use in the sequel. The Fourier transform of a tempered distribution is the tempered distribution that we denote by It is defined by
where
The inverse Fourier transform is
where is a homeomorphism of onto Operations and are the inverse of each other; see [,,,].
For the case where f has the classical Fourier transform We denote by the regular distribution defined by function Then and In the case where then a.e. See [].
Suppose that and consider defined as
Then, as converges in to a function and
converges in to The functions f and F are connected by the formulae
for almost all values of x; see [], p. 69. Then, is defined as the Fourier transform of Fourier transform is a linear isometry of onto and see [], p. 148 and [], p. 216.
Let and suppose that for some , for sufficiently large. Then
where ; see [], p. 159 and 202.
From Fubini’s theorem, it is easily seen that f holds the following additional condition: belongs to then
The GFD derivative of the Caputo type of order , of a function f, , and for is defined by (1) and (2). The definitions of the order GFD of the Caputo type (1) and (2) can be extended on as follows. For f, we have (see (14)),
where
Definition 1.
Let such that
Then, we define
From the definition, it follows that does not exist for every For the case where we have
Consequently, using Definition 1 we extended the operator onto and for we determine that is a regular distribution.
Let
The Laplace transform of can be defined as
where (cf. [,]).
4. Solutions to the Cauchy Problem (17), (18)
To write the relevant system of equations in the distributional form, we note that the system of equations in dimensionless form, describing motion of one-dimensional continuum, consists of the equation of motion, the constitutive equation, and the strain definition (geometrical equation) defined for , and reads
where , , , and denote the stress, displacement, and strain at the point x and time respectively. The initial and boundary conditions associated with (22) are
Since we will consider the above equation with initial data over (and ), we put for the displacement where H is Heviside distribution, and we consider u as a distribution. This implies
where , so that the distributional form to (22) becomes
with , and where we used and .
The equation in which corresponds to (17) and (18) is
where , , and Also, and denote the partial derivatives in the sense of distributions. We first sought the solutions to (24) that are regular distributions . Our main result is the following theorem.
Theorem 1.
Let . Suppose that and have Fourier transforms and , respectively, such that , and , , are regular distributions or measures. Then the distributions u given by:
- withand where
- ,
are solutions to (24).
Proof.
First we look for solutions that are regular tempered distributions defined by the function , , By applying the Fourier and Laplace transforms to (24) (cf. Section 3), we obtain
where , Consequently,
Note that
The inverse Laplace transform of (30), with (31), is given in [], Equation (38), and reads
which proves (25). To obtain other forms of the solution, we consider the following special cases:
So, theorem is proved. □
Remark 3.
Suppose that In this case, we have
so that
We have this case treated in []. The inverse Laplace transform gives
where and ; see [], p. 171. From (36), it follows that , could only be a regular distribution or a measure (distribution of order zero) because the products in the both two addends of (36) have to exist. Finally,
which is the result presented in [].
5. Numerical Examples
(A) As a first specific example, we take generalization of the problem treated in []. Let and
Since is even, we have from (38)
In the Figure 1 and Figure 2 we show solution given by (39) for the same set of parameters except for values of It is seen that increase in leads to a decrease in the amplitude of the propagating wave. However, an increase in leads to the increase in speed of propagation of the maximum of the wave. This is a rather unexpected effect of .
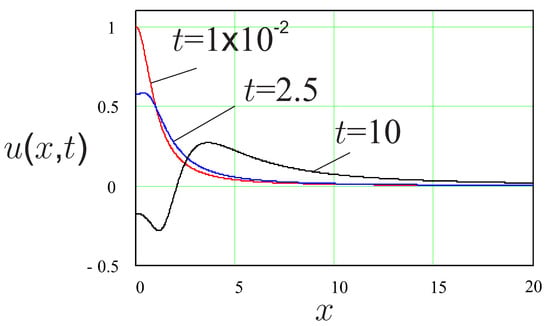
Figure 1.
Solution (39) at three time instants for , , and .
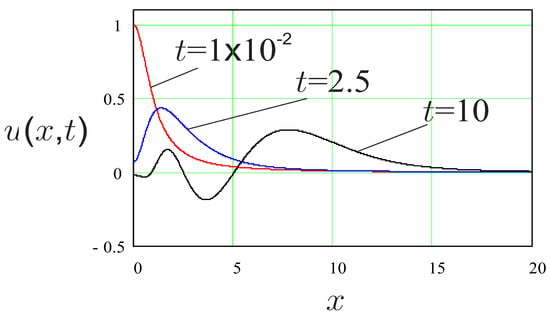
Figure 2.
Solution (39) at three time instants for , , and .
Equation (41) shows that in this case we have the classical wave equation with the speed of propagation B.
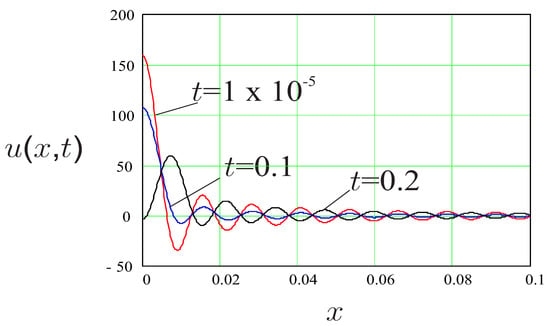
Figure 3.
Solution (25) at three time instants for , , , and .
From the Figure 3 and Figure 4, we conclude that, for the case where other parameters have fixed values, the order of fractional derivative that models external dissipation has small influence on the waves at the beginning of motion. It decreases the amplitude of waves for larger times.
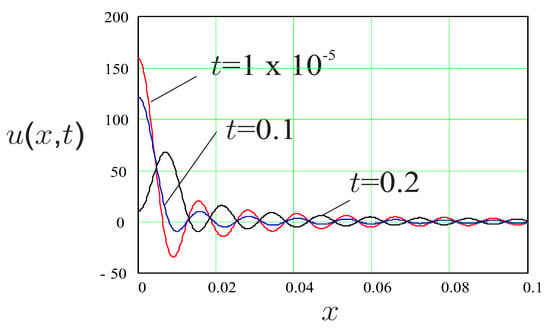
Figure 4.
Solution (35) at three time instants for , , , and .
6. Conclusions
In this work, we formulated a new wave equation with non-local action with fractional type of dissipation (24). The solution to the equation is given for several special cases. Our main conclusions are:
- 1.
- We introduced a new measure of deformation, generalizing the classical one-dimensional strain. It is non-local and contains two parameters, and In the special case , it is reduced to classical or the strain measure or the generalized strain measure used in []. We note that a similar formalism was used in [] in the context of classical particle mechanics, i.e., a finite number of degrees of freedom.
- 2.
- 3.
- The obtained solution shows dissipation in the sense that amplitude is decreasing. However, there is no periodicity/quasiperiodicity of the solution. This is explained by the known property of the fractional derivative: the fractional derivative of a periodic function is not periodic; see [,].
Author Contributions
Conceptualization, T.M.A. and D.D.D.; methodology, T.M.A. and E.K.; software, E.G. and E.K.; formal analysis, T.M.A., D.D.D., E.G. and E.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by State University of Novi Pazar.
Acknowledgments
Faculty of Technical Sciences, University of Novi Sad, supported T.M.A.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Gorenflo, R.; Mainardi, F. Fractional Calculus, Integral and Differential Equations of Fractional Order. In Fractional Calculus in Continuum Mechanics; Carpinteri, A., Mainardi, F., Eds.; Springer: Berlin/Heidelberg, Germany, 1977; pp. 223–276. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.I. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Lazopulos, K.A. Non-local Continuum Mechanics and Fractional Calculus. Mech. Res. Commun. 2006, 33, 753–757. [Google Scholar] [CrossRef]
- Sandev, T.; Chechkin, A.; Kantz, H.; Metzler, R. Diffusion and Fokker-Planck-Smoluchowski equations with Generalized memory kernel. Fract. Calc. Appl. Anal. 2015, 18, 1006–1038. [Google Scholar] [CrossRef]
- Tarasov, V.E. General Fractional Dynamics. Mathematics 2021, 9, 1464. [Google Scholar] [CrossRef]
- Diethelm, K.; Kiryakova, V.; Luchko, Y.; Tenreiro Machado, J.A.; Tarasov, T.E. Trends, directions for further research, and some open problems of fractional calculus. Nonlinear Dyn. 2022, 107, 3245–3270. [Google Scholar] [CrossRef]
- Tarasov, V.E. General Non-Local Continuum Mechanics: Derivation of Balance Equations. Mathematics 2022, 10, 1427. [Google Scholar] [CrossRef]
- Sandev, T.; Sokolov, I.M.; Metzler, R.; Chechkin, A. Beyond monofractional kinetics. Chaos Solitons Fractals 2017, 102, 210–217. [Google Scholar] [CrossRef]
- Molina-Garcia, D.; Sandev, T.; Safdari, H.; Pagnini, G.; Chechkin, A.; Metzler, R. Crossover from anomalous to normal diffusion: Truncated power-law noise correlations and applications to dynamics in lipid bilayers. New J. Phys. 2018, 20, 103027. [Google Scholar] [CrossRef]
- Atanackovic, T.M.; Guran, A. Theory of Elasticity for Scientists and Engineers; Birkhauser: Boston, MA, USA, 2000. [Google Scholar]
- Tarasov, V.E. General Fractional Calculus in Multi-Dimensional Space: Riesz Form. Mathematics 2023, 11, 1651. [Google Scholar] [CrossRef]
- Atanackovic, T.M.; Stankovic, B. Generalized Wave Equation in Non-local Elasticity. Acta Mech. 2009, 208, 1–10. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A New Definition of Fractional Derivative without Singular Kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atanackovic, T.M.; Pilipovic, S.; Zorica, D. Properties of the Caputo–Fabrizio Fractional Derivative and Its Distributional Settings. Fract. Calc. Appl. Anal. 2018, 21, 29–44. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series and Products; Academic Press: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Stein, E.M. Singular Integrals and Differentiability Properties of Functions; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Schwartz, L. Théorie des Distributions; Hermann: Paris, France, 1957. [Google Scholar]
- Schwartz, L. Méthodes Mathématiques pour les Sciences Physiques; Hermann: Paris, France, 1961. [Google Scholar]
- Szmydt, Z. Fourier Transformation and Linear Differential Equations; Reidel Publishing Company: Dordrecht, The Netherlands, 1977. [Google Scholar]
- Vladimirov, V.S. Generalized Functions in Mathematical Physics; Mir Publishers: Moscow, Russia, 1979. [Google Scholar]
- Titchmarsh, E.C. Introduction to the Theory of Fourier Integrals; Clarendon Press: Oxford, UK, 1948. [Google Scholar]
- Baclic, B.S.; Atanackovic, T.M. Stability and Creep of a Fractional Derivative Order Viscoelastic Rod. Bulletin 2000, 25, 115–131. [Google Scholar]
- Magnus, W.; Oberhettinger, F. Formeln und Sätze für die Speziellen Funktionen der Mathematischen Physik; Springer: Berlin/Heidelberg, Germany, 1948. [Google Scholar]
- Klimek, M. Fractional Sequential Mechanics—Models with Symmetric Fractional Derivative. Czechoslov. J. Phys. 2001, 51, 1348–1354. [Google Scholar] [CrossRef]
- Area, I.; Losada, J.; Nieto, J.J. On Fractional Derivatives and Primitives of Periodic Functions. Abstr. Appl. Anal. 2014, 2014, 392598. [Google Scholar]
- Garrappa, R.; Kaslik, E.; Popolizio, M. Evaluation of Fractional Integrals and Derivatives of Elementary Functions: Overview and Tutorial. Mathematics 2019, 7, 407. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).