Abstract
Over the past decade, fractional-order laser chaotic systems have attracted a lot of attention from a variety of fields, including theoretical research as well as practical applications, which has resulted in the development of a number of different system classes. This paper introduces a novel single-input finite-time PID sliding mode control (SMC) technique to stabilize a specific group of unknown 4-dimensional chaotic fractional-order (FO) laser systems. By combining the PID concept with the FO-version of the Lyapunov stability theory, a novel finite-time PID SMC strategy has been developed, which effectively mitigates chaotic behavior in the mentioned unknown 4-dimensional chaotic FO laser system. This method makes use of a characteristic of FO chaotic systems known as boundedness, which is used here. Notably, the control input’s sign function, which is responsible for undesirable chattering, is transformed into the fractional derivative of the control input. This transformation results in a smooth and chattering-free control input, further enhancing the method’s performance. To demonstrate the efficacy of the proposed chattering-free–finite-time PID SMC technique, two numerical scenarios are presented, showcasing its efficient performance in stabilizing the unknown 4-dimensional chaotic FO laser system. These scenarios serve as illustrations of the method’s potential for practical applications.
Keywords:
stabilization; finite-time PID sliding mode control; FO laser systems; dynamic-free scheme; chattering-free controller MSC:
26A33; 93C10; 93D05; 93D40
1. Introduction
Laser dynamic systems showcase a multitude of intricate phenomena common to dissipative systems, while also boasting other advantageous attributes. These sought-after qualities encompass bi-stability, accurate pulse replication, proximity to the ideal model, inherent wideband chaotic laser signal, straightforward design, noise-resembling tendencies, and inherent randomization. The aforementioned features demonstrate the superior potential of chaotic laser systems in chaos cryptography compared to other types of chaotic systems [1].
Following the inception of laser-based digital communications as documented in [2], there has been an upsurge in the exploration of chaotic laser mechanisms. This surge of interest has brought about an increase in the number of researchers devoted to this field. Notably, the domains of image encryption and secure communications stand out as particularly captivating areas for the application of chaotic laser systems.
With a historical lineage spanning more than three centuries, fractional calculus offers the capability to delve deeper into the analysis of natural phenomena. In the context of fractional-order (FO) differential equations, the order of differentiation [3] need not necessarily be an integer. Over the past twenty years, FO systems have captured significant attention from both scientists and engineers, who have utilized these systems to model a wide array of phenomena. Disciplines such as the medical sciences [4], neural networks [5,6], chemical systems [7], economical systems [8], and emotional sciences [9] have extensively chronicled the substantial role of FO systems. These systems find applications in an array of fields, testifying to their versatility and relevance in modern research and technology [10].
A fractional-order laser system represents a significant advancement in laser dynamics, modeling, and control. Unlike conventional integer-order systems, fractional-order systems introduce fractional derivatives and integrals that capture complex temporal dependencies and memory effects in laser dynamics. The importance of controlling fractional-order laser systems lies in their potential to enhance the performance and stability of various applications. These applications span a range of fields, including secure communications, high-resolution imaging, and precision instrumentation. The efficient control of fractional-order laser systems is crucial for optimizing their behavior and realizing their potential in practical applications. Precise control mechanisms enable the manipulation of intricate laser dynamics, leading to improved performance in chaotic communication systems, enhanced signal quality in high-speed data transmission, and better noise reduction techniques. Additionally, the control of fractional-order lasers holds promise in biomedical applications, where stable and coherent laser outputs are essential for tasks such as optical coherence tomography and laser-based medical treatments. Research efforts aimed at developing robust control strategies for fractional-order laser systems continue to contribute to advancements in both the fundamental understanding and real-world applications of these systems.
Furthermore, extensive research has demonstrated the prevalence of chaotic behavior within FO systems, such as those exhibited by FO laser systems. This disorderly behavior is due to the rhythmic properties of the systems as well as their hypersensitivity to the beginning terms. Consequently, the research community has directed its efforts towards devising diverse methodologies for the control and synchronization of chaotic FO systems. Within this context, a plethora of control strategies have been proposed, encompassing techniques such as the SMC controller [11], fuzzy controller [12,13], PID controller [14], observer controller [15], adaptive controller [16], and optimal controller [17], all aimed at governing and harmonizing the dynamics of chaotic FO systems.
The Sliding Mode Control (SMC) strategy is quickly becoming one of the most prominent control methods due to its extensive appeal, rapid rise to prominence, and acclaim for its robust theoretical underpinnings and real-world utility. Broadly, the SMC framework can be segmented into two key components, outlined as follows:
- Formulating a robust and stable sliding surface that suits the specific control context.
- Constructing control laws designed to quell chaotic trajectories within Fractional-Order (FO) Systems, thereby maintaining their adherence to the designated sliding surface.
Numerous scholars have recently developed diverse Sliding Mode Control (SMC) techniques to achieve synchronization in FO systems. For instance, in the context of uncertain FO nonlinear systems challenged by uncertainties and external factors, an FO integral fuzzy SMC strategy is proposed in [18]. Another approach, outlined in [19], introduces an LQR-based FOSMC scheme that employs linear matrix inequalities to regulate FO chaotic systems. Addressing the stabilization of mismatched FO mechanisms, a novel FOSMC observer has been introduced in [20]. In the meantime, a synergistic SMC method has been established by the authors of [21], which uses a one-channel approach to synchronize complicated FO networks.
Researchers have also developed robust methodologies. In [22], a potent FOSMC technique was devised, utilizing a frequency-distribution model to manage errors and control chaotic FO Jafari-Sprott structures. In the pursuit of synchronizing ambiguous chaotic FO systems, ref. [23] presents an adaptive terminal SMC technique. For dealing with nonlinear FO systems, ref. [24] suggests a synchronization utilizing a non-singular T–S–fuzzy SMC methodology. The authors of [25] delve into a class of complex non-identical-order chaotic FO systems, proposing an adaptive SMC method tailored to such scenarios. For unknown hyperchaotic FO structures, ref. [26] recommends a dependable SMC approach grounded in neural networks to achieve finite-time synchronization. In [27], a stabilization strategy is outlined utilizing a type-2 fuzzy SMC for a particular type of unstable FO systems with ambiguous dynamics and external disturbances. Extending to practical applications, ref. [28] formulates a control approach for stabilizing both transmitter and receiver systems, rooted in a 4D nonlinear FO–hyperchaotic system featuring external disturbances. The topic of intermittent control and FT synchronizing in complex dynamical neural-networks is addressed in reference [29], which does so within the context of a FO framework. Additionally, ref. [30] introduces a non-integer SMC using the Fractional Derivative Method (FDM) to stabilize intricate FO chaotic systems.
However, the research works mentioned typically exhibit at least one of the subsequent limitations:
- The majority of these approaches involve multi-input controller strategies, which can be challenging to implement in practical scenarios where operating multi-input controllers is complex.
- The operation of SMC controllers often leads to undesirable chattering phenomena.
- These control schemes predominantly rely on utilizing their constituent functions in their analysis and design.
- A significant portion of these studies have adopted a simplistic system definition, disregarding factors such as model uncertainties, external distributions, and input saturations.
Considering the aforementioned discussions, there emerges a pressing need to formulate and propose a chattering-free single-input finite-time PID SMC technique. This proposition gains significance in effectively managing intricate FO laser systems while contending with system uncertainties, external disturbances, and input saturation.
A noteworthy innovation lies in transforming the control input’s sign function, responsible for generating undesirable chattering, into the fractional derivative of the control input. This strategic transformation results in a controlled input that maintains smoothness and is free from chattering, ultimately enhancing the overall method’s performance.
As a consequence of this, the work expresses that the optimum strategy to address the control problem of a class of 4D FO laser chaotic systems, in the face of the system’s uncertainties, outside disturbances, and input-saturation, is to create a chattering-free single-input finite-time PID SMC technique. This designed methodology unfolds as follows:
Initially, a user-friendly sliding surface is introduced, grounded in the FO integration concept, facilitating a simplified design process. Furthermore, an additional PID sliding surface (SS) is thoughtfully crafted to bolster robustness. Leveraging the FO-version of the Lyapunov stability theory, a dynamic–free control strategy is meticulously developed, ensuring a seamless single sliding motion.
Importantly, it is worth clarifying that the construction of this no-chatter technique deliberately abstains from utilizing the linear or nonlinear components of the system’s dynamics. To illustrate the practicality and efficacy of the approach, specific simulations are provided as exemplars, demonstrating its utility and effectiveness.
In essence, this paper embarks on the trajectory of presenting an innovative and robust control approach. By skillfully navigating uncertainties, disturbances, and input saturation, this approach not only addresses the challenges posed by chaotic FO laser systems but also elevates both stability and performance.
Moreover, the novel finite-time PID SMC technique developed in our study leverages fractional-order Lyapunov stability theory to address chaotic behavior in the targeted 4D fractional-order laser systems. Here is an explanation of how this technique employs fractional-order Lyapunov stability theory and what sets it apart from existing control strategies:
- Fractional-Order Lyapunov Stability Theory: Our approach utilizes fractional-order Lyapunov stability theory, which is a mathematical framework adapted for systems with fractional-order dynamics. Traditional Lyapunov stability theory is designed for integer-order systems, while fractional-order Lyapunov stability theory extends its applicability to systems with fractional-order derivatives. By incorporating this theory, we can design controllers that account for the unique characteristics of fractional-order chaotic systems.
- Finite-Time Control Objective: The primary focus of our technique is to achieve finite-time control and stabilization. This means that we aim to drive the system to a desired state within a specified time frame. Traditional control strategies often target asymptotic or steady-state stability, whereas our approach emphasizes achieving stability within a finite time, which is particularly relevant in real-world applications with timing constraints.
- PID SMC Integration: Our technique integrates the PID (Proportional-Integral-Derivative) controller with a sliding mode control. The PID component provides a robust baseline control strategy, while the sliding mode control component allows for rapid adjustment and robustness to disturbances. This combination is essential for achieving the desired finite-time stabilization.
- Chatter Mitigation: One of the key distinctions of our approach is its effectiveness in mitigating chatter, which is a common issue in sliding mode controls. Chatter refers to high-frequency oscillations in the control signal, which can be undesirable and potentially damaging in practical systems. Our technique is designed to significantly reduce or eliminate chatter, which is a substantial improvement over traditional sliding mode control methods.
- Tailored for Chaotic Fractional-Order Systems: Our control technique is specifically tailored for 4D chaotic fractional-order laser systems. Chaotic systems exhibit complex, unpredictable behavior, and fractional-order dynamics introduce additional complexities. By addressing these challenges with our approach, we provide a control strategy that is uniquely suited to the characteristics of the targeted systems.
The paper’s layout is outlined in the subsequent statements. Section 2 offers an introduction to essential groundwork, encompassing FO calculus and FO mechanisms. Section 3 details the problem statement surrounding the stabilization of the 4-dimensional FO laser chaotic system. Subsequently, we introduce a dynamic–free single-input PID SMC approach designed to address the control challenge in Section 3. This is followed by Section 4, where practical scenarios are provided to visually validate the efficacy and efficiency of the proposed finite-time PID SMC method. The concluding insights and implications of the study are encapsulated in Section 5.
2. Preliminary Concepts
Definition 1
([31]). Examine the subsequent continuous function denoted as within the domain of real numbers (). Then, the Riemann-Liouville non-integer integral definition of is expressed as:
Here,
represents the starting time, and
defines the integral order. The function
denotes the Gamma function.
Definition 2
([31]). Examine the given continuous function within the real numbers domain. The definition of the FO Caputo derivative for is expressed as follows:
Throughout the remainder of this work, the Caputo derivative is denoted by the notation
. The following are some of the features exhibited by this definition:
Feature 1
([32]). If , and is a member of , then one obtains
Feature 2
([32]). Assume that , and is a real number. In such cases, .
Theorem 1
([33]). Consider a continuous, positive-definite function denoted as , which satisfies the subsequent differential inequality for all :
where
,
are positive numbers. Then, for any given
,
holds the following relation:
Also,
, with
obtained via
Theorem 2
([34]).
Assuming , let the FO system meet the Lipschitz condition and possess an equilibrium point at . Given these premises, consider the existence of a Lyapunov function that fulfills the provided conditions:
In which,
, and
are positive constants. In such a scenario, if the aforementioned conditions are satisfied, the equilibrium point of the FO system
will exhibit asymptotic stability in accordance with the Mittag–Leffler specifications.
3. The Problem Formulation and Design of the Finite-Time PID Sliding Mode Control
This section starts by providing a fundamental concept about the behavior seen in an unknown 4-dimensional chaotic FO laser mechanism. It then describes how the problem of robust finite-time control and stabilization for this FO laser system is framed, considering the existence of completely unknown terms and uncertainties. Furthermore, this section comprehensively elucidates the entire process involved in designing and analyzing the finite-time PID SMC methodology.
3.1. Problem Statement
In recent times, a 4-dimensional FO laser chaotic system has been introduced from the Lorenz-Haken Model. This derivation is documented in references [35,36]. The system equations for this 4D FO laser chaotic system are formulated as follows:
where , and show the state trajectories of the system and shows a non-integer order of derivative.
The specific group of 4-dimensional chaotic fractional-order laser systems that our study addresses refers to a class of laser systems with complex dynamics and non-integer-order differential equations governing their behavior. Let us break down the significance of this focus in the context of our research objectives:
- (i)
- Complex Dynamics: Chaotic systems, such as laser systems, exhibit highly complex and unpredictable behavior. These systems are often characterized by their sensitivity to initial conditions and the presence of irregular, aperiodic oscillations. Understanding and controlling such complex dynamics is a significant challenge in the field of control theory and engineering.
- (ii)
- Fractional-Order Dynamics: Fractional-order differential equations are used to model systems with memory and hereditary properties, which are common in various real-world applications, including laser systems. The use of fractional-order dynamics provides a more accurate representation of the laser system’s behavior compared to that of traditional integer-order models.
- (iii)
- Four-Dimensional Space: In the context of 4D fractional-order laser systems, the “4D” refers to the four state variables or dimensions that describe the system’s behavior. These dimensions could represent different aspects of the laser system’s operation, such as power, intensity, wavelength, and time.
- (iv)
- Significance in Research Objectives: The significance of focusing on this specific group of laser systems in our research is twofold:
- (a)
- Practical Relevance: Many laser-based applications, including laser communication and precision manufacturing, involve 4D laser systems. Therefore, understanding and controlling the chaotic behavior in these systems is directly relevant to practical engineering applications.
- (b)
- Complexity and Challenge: The complexity of 4D chaotic fractional-order laser systems presents a formidable challenge in control theory. By addressing this class of systems, our research aims to contribute to the development of control strategies that can handle highly complex, non-integer-order dynamics and chaotic behavior.
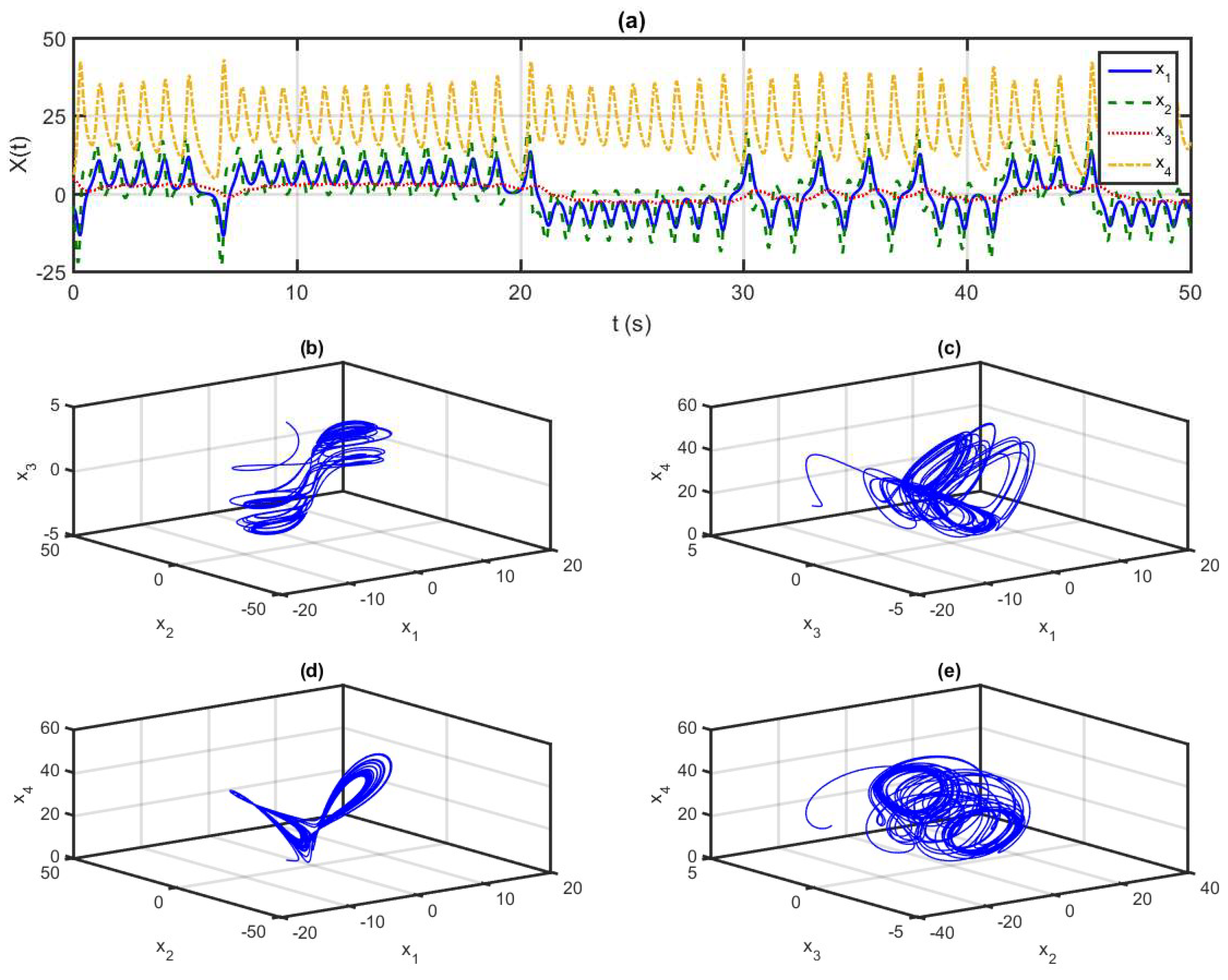
It is shown in the paper [36] that the FO system (8) exhibits unpredictable and chaotic behavior when the parameters are set to , , , , and , respectively. For , and as initial values and , the work efficiency of the FO system (8) is displayed in Figure 1.
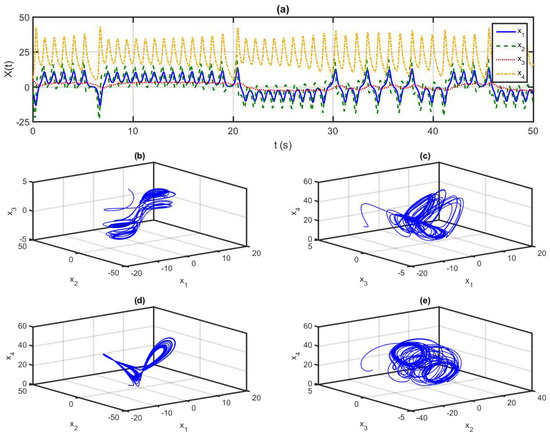
Figure 1.
Exploring Chaotic Dynamics in the FO laser system (8) at : (a) Visualizing the trajectories of states within the FO laser system (8), and conducting a 3D simulation to illustrate the interdependence of (b) and states, (c) and states, (d) and states, and (e) and states, respectively.
Assumption 1.
The function
exhibits smoothness within a neighborhood of
. Subsequently, for all of the
, and
, the subsystem
demonstrates asymptotic stability around the origin.
Continuing with the endeavor to address the stabilization challenge for the FO laser system (8), the subsequent FO mechanism is being introduced:
where
,
,
, and
. Here,
denotes the uncertainties and external disturbances affecting the system. These elements will be elaborated upon in subsequent sections. Furthermore,
is input control saturation, which is defined as
In which,
where
and
represent the boundaries of the saturation relation, also
signifies the slope of the saturation.
Assumption 2.
For
, it is assumed that the activated functions
meet the Lipschitz condition over the domain
concerning the activation variables
Assumption 3.
The states of the FO structures tend to be constrained within the phase space, as observed from the outcomes of irregular attractors in the chaotic dynamics [37,38]. Consequently, there are positive numbers of and
that satisfy the terms of the following relationships:
Additionally, it is anticipated that the terms representing uncertainties and external disturbances will remain bounded in magnitude. Hence, there exist positive constants of
and
for which the following holds:
Assumption 4.
Ensuring the boundedness of the controller stands as a paramount concern for viable control input. However, accomplishing this goal presents a considerable challenge. Therefore, the terms of
are required to remain bounded. Therefore, there are positive real numbers of
and
that fulfill the following condition:
Remark 1.
The boundedness characteristic of fractional-order chaotic systems is leveraged in our control method to achieve stability and reduce chaotic behavior by introducing constraints or boundaries within which the system’s dynamics are directed and controlled. These constraints are established to manage the system’s behavior, ensuring it remains within prescribed limits. By governing the system within these defined boundaries, stability is achieved and chaotic behavior is restrained. Consequently, the system’s unpredictability is reduced, rendering it more amenable to practical applications where stability and control are of utmost importance.
3.2. Design of the Finite-Time PID SMC
As a first step toward stabilizing the chaotic FO laser mechanism (10), the following steady SS is designed in the initial phase:
where and show two numbers.
When the sliding motion occurs, it is widely recognized that the condition is satisfied, consequently,
Theorem 3.
Consider SS (15) and relation (16). Then, the system (17) is finite-time stable, and zero is the asymptotic equilibrium point for the system (15).
Proof.
Consider the following Lyapunov mechanism:
Now, by taking integer derivative from (18), one gets
Insert from (17) into Equation (19), then one has
Therefore, based on (22), the inequality is always true and . Thus, the stability criteria in Theorem 1 are fulfilled, and the asymptotic stability of the SS dynamics (17) is gained.
According to (18) and (22),
Therefore, based on Theory 2, the state converge to zero in a finite time , and the proof is completed. □
Remark 2.
The choice of
as the Lyapunov function candidate in this research offers several benefits. It provides a simple and transparent mathematical form, enhancing the clarity of the analysis. Additionally, has a direct physical interpretation, making it intuitive and relatable, especially when it represents the magnitude of a physical quantity. Its versatility allows for application in various contexts, and when the derivative of
is negative semidefinite, it can effectively serve as a Lyapunov candidate, demonstrating stability. The mathematical convenience of
often simplifies the analytical process, and it has established connections to concepts of absolute stability in control theory, which can be advantageous in control system design and robustness analysis.
Next, a nonlinear PID sliding surface will be designed, utilizing SS (15), in order to eradicate the chattering phenomenon.
in which, and are positive real constants and is a positive number.
Similar to (16), the condition is satisfied for (24), consequently,
Theorem 4.
Consider PID sliding surface (24) and relations (25) and (26). Then, the nonlinear PID sliding surface system (27) is finite-time stable, and zero is the asymptotic equilibrium point for (24).
Proof.
By selecting a Lyapunov function in the following manner,
and using integer derivative for (28) obtains
By replacing from (27) in Equation (30), we have
where . Consequently, based on (33), the relation is always held and . Thus, the stabilization criteria in Theorey 2 are acheived, and asymptotic stability of the nonlinear PID sliding surface system (27) is obtained.
Now, according to (28) and (34),
therefore, according to Theorem 1, the status s(t) will eventually approach 0 in a finite time , and the proof is done. □
Now, a novel no-chatter–dynamic-free control methodology will be introduced in the following theorem, designed as:
Remark 3.
As we have known in the controller (35), the discrete sign operator, which is the primary cause of the undesirable chattering phenomenon, is situated within the fractional derivative of . Consequently, the controller no longer includes the sign function, thereby eliminating any chattering in the control process.
Remark 4.
The transformation of the control input’s sign function into a fractional derivative in this research achieves a smoother and chattering-free control input. This reduces abrupt fluctuations, resulting in more stable and precise control. Compared to traditional methods, this innovation offers enhanced control accuracy, reduced mechanical stress, and improved system performance, making it well-suited for complex systems like chaotic fractional-order laser systems.
Theorem 5.
Suppose the FO laser chaotic mechanism (12). Then, by operating the following control methodology (35), the process of trajectories of the FO laser chaotic mechanism (12) will exhibit asymptotic stability in finite-time.
Proof.
By selecting a Lyapunov function in this form,
using integer derivative for (36), it obtains
and replacing from (35) in Equation (37), we have
By attention to (13a), (13b), and (14), and inserting from (35), one gets
Now, by some simplifications,
where . Consequently, based on (33), the relation is always held and . Hence, the stabilization criteria in Theory 2 are derived, and trajectories of the FO laser chaotic mechanism (12) will convergence to the origin.
Now, based on (28) and (46), we have
Consequently, according to Theory 1, the state approaches to the zero in a finite-time , and the proof is done. □
Remark 5.
Laser systems represent one of the most commonly employed tools in optical engineering. This research addresses the pressing requirements of this industry by introducing a two-stage PID sliding surface controller method for designing single-input controllers and applying them to control and stabilize a specific category of 4D fractional-order laser systems. Noteworthy aspects of this approach include its ability to achieve finite-time efficiency, eliminate chattering, and offer straightforward utilization.
Remark 6.
The motivation for our research in this paper stems from the following factors:
- Practical Relevance: Chaotic behavior is often observed in real-world systems, including laser systems. Achieving stability and control in such systems is crucial for various applications, such as laser-based communication and precision instrumentation.
- Chatter Reduction: Chattering is a significant issue in sliding mode control. Traditional methods may not be effective in dealing with it. Our motivation lies in developing a control technique that can effectively reduce or eliminate chattering, which is a persistent problem in the field.
- Fractional-Order Dynamics: Fractional-order systems are a relatively new and evolving field of study. Motivated by the increasing realization of the fractional-order dynamics in physical systems, we aim to contribute to the understanding of how to control and stabilize these systems, which is still an emerging area of research.
- Finite-Time Control: Finite-time control is of interest in situations where there is a need for a response within a specific time frame. This research addresses the requirement for finite-time stabilization, which is relevant in applications with strict timing constraints.
In terms of contributions to the existing body of knowledge on fractional-order chaotic systems and control strategies, our research offers several unique contributions:
- Chatter Reduction: Our proposed technique focuses on mitigating chattering, which is a challenging problem in sliding mode control. By achieving no-chatter control, we contribute to the improvement of control strategies for fractional-order chaotic systems.
- Finite-Time Stabilization: The introduction of a finite-time PID sliding mode control technique adds to the toolbox of control strategies for fractional-order chaotic systems, offering more versatility in addressing specific timing constraints.
- Application to Real-World Systems: By applying this technique to a class of 4D fractional-order laser systems, we bridge the gap between the theoretical developments and practical applications. This research contributes to the understanding of how fractional-order control can be applied in real-world scenarios.
Remark 7.
The implementation of the proposed finite-time PID SMC technique involves a thorough understanding of fractional calculus and stability analysis. This requires mathematical rigor to derive stability conditions and prove that the desired state is reached within a finite time. In terms of the computational aspects, efficient numerical methods are essential for approximating fractional derivatives. Real-time computation is crucial for practical applications, and the computational efficiency of this method depends on its ability to generate control inputs quickly and with low computational overhead. Regarding complexity, this method may be influenced by the added mathematical analysis and the use of fractional calculus. Nevertheless, this complexity is often justified by the benefits it offers, such as the reduced chattering and the achievement of finite-time control objectives. These advantages make our method a strong candidate for applications with specific requirements. When compared to traditional control methods, the added complexity due to the mathematical analysis and fractional calculus should be considered, along with the potential performance gains. Therefore, the choice of control method should be made based on the specific needs and constraints of the application, considering the trade-offs in complexity and performance.
Remark 8.
In the view of the field, several promising avenues exist for the application and further advancement of the chattering-free–finite-time PID sliding mode control (SMC) technique in controlling chaotic systems with fractional-order dynamics. These avenues include the development of precise drug delivery systems, wearable medical devices, and patient-specific treatments in healthcare; ensuring the safety and efficiency of autonomous systems, unmanned aerial vehicles, and robotics; enhancing product quality and production efficiency in advanced manufacturing processes; improving environmental monitoring, climate modeling, and pollution control in environmental sciences; stabilizing renewable energy systems, smart grids, and power electronics in the energy sector; advancing fractional-order control theory for interdisciplinary applications; optimizing the technique for real-time operations; refining its application in human–machine interaction for more intuitive and precise control; integrating it into educational curricula and training programs; and collaborating with experts from diverse fields to explore novel applications and refine the technique to meet specific domain needs. Pursuing these avenues facilitates the utilization of the chattering-free–finite-time PID SMC technique to address complex control challenges and contribute to advancements in various fields while further refining and adapting the technique to diverse applications.
Remark 9.
Effectively conveying the practical benefits and implications of our research to a broad audience, including researchers, practitioners, and educators, can be achieved through the utilization of clear and accessible language, exemplifying real-world applications with practical examples in healthcare, aerospace, manufacturing, and environmental monitoring. Incorporating illustrative visual aids, testimonials, and case studies can visually demonstrate the performance enhancements achieved through our technique. Additionally, by referencing potential collaboration opportunities and educational resources, this article can inspire the further exploration and application of our method. Offering practical guidance, recommendations, and insights into how our research can be integrated into educational curricula and training programs underscores its significance in preparing the next generation of engineers and researchers. Ultimately, a call to action encourages readers to actively contribute to the advancement of our technique in their respective fields.
Remark 10.
The broader significance of our work in advancing our understanding and control of chaotic systems, especially those with fractional-order dynamics, is underscored by its potential to unveil the utility of fractional-order control techniques. Through the successful mitigation of chattering and the achievement of finite-time control objectives, the complex and challenging aspects of chaotic systems are addressed, resulting in smoother control, reduced mechanical wear, and the fulfillment of strict timing requirements. The technique’s versatility and adaptability to various chaotic systems highlight its broad applicability in diverse domains, inspiring further research and interdisciplinary collaborations. Moreover, the importance of integrating these findings into educational curricula and training programs is emphasized, ensuring the next generation of engineers and researchers is equipped to navigate the intricacies of chaotic systems. In this way, innovation and progress in the field of control theory are fostered, promoting smoother, more precise, and adaptable control in diverse applications.
Remark 11.
The innovative application of fractional-order control techniques to chaotic systems is underscored, highlighting the potential of fractional calculus as an unexplored avenue for addressing intricate control challenges. The importance of chattering reduction in chaotic systems, resulting in smoother and more precise control signals, is stressed, particularly in applications necessitating high precision and stability. The practical implications of achieving finite-time control objectives are showcased, with a focus on time-critical scenarios where this feature is distinctive and relevant. The versatility and adaptability of our technique are highlighted, emphasizing its applicability to various chaotic systems and fields. Readers and fellow researchers are encouraged to explore interdisciplinary collaboration, recognizing that our research bridges the gap between fractional calculus and practical control applications, offering opportunities for innovation. The educational impact is underlined, emphasizing the need to integrate these findings into educational curricula and training programs to prepare future engineers and researchers. Practical validation and real-world applications provide tangible evidence of our technique’s effectiveness in addressing complex control challenges, and a call to action invites readers to actively consider the practical benefits of our research and explore opportunities for its application and further development in their respective fields.
Remark 12.
This proposed control technique is foreseen to exert a significant influence on the field of chaotic systems and control in the forthcoming years. It is anticipated that fractional-order control techniques will be more widely adopted in various applications, driven by the recognized potential for smoother and more precise control, chattering reduction, and the ability to meet time-critical objectives. The versatility of this technique will lead to innovative interdisciplinary applications, harnessing its benefits in fields such as healthcare, aerospace, manufacturing, and robotics. Advanced control theory is expected to develop, incorporating fractional calculus and yielding new mathematical tools and insights to address control challenges. Real-world impact will ensue from the practical validation of our technique, enhancing the stability and performance of systems. As educational institutions adapt, students will be exposed to fractional-order control theory as a standard part of their curriculum, fostering a new generation of control experts. The technique’s continuous refinement, addressing specific challenges in different domains, is anticipated, as driven by ongoing research. Collaborative research endeavors are expected to thrive as experts from diverse fields work together to explore the full potential of fractional-order control in their respective domains, leading to more precise and stable control in complex and chaotic systems.
Remark 13.
To comprehensively convey our research and its implications in the revised article, we should address complexities and scalability challenges in implementing this technique, highlight safety and reliability, and examine its robustness to disturbances and uncertainties. Transparently presenting limitations, real-world challenges, and interactions with other control strategies is essential. Insights into applying this technique in diverse scenarios, feedback from end users, and ethical considerations in domains like healthcare and autonomous systems should be provided. Additionally, intellectual property and commercialization avenues need discussion. Integrating these details will enhance the understanding of our research and its practical considerations.
4. Simulations
Here, two illustrative scenarios have been considered to showcase the efficacy of the proposed chattering-free–finite-time PID SMC technique. Furthermore, to show a better performance of the finite-time PID SMC method, the controller will be implemented after 10 s. The numerical simulations have been executed utilizing the MATLAB software (Version 2023b), employing a customized version of the Adams-Bashforth-Moulton algorithm as outlined in references [39,40,41]. The controller parameters in both scenarios 1 and 2 are provided in Table 1.

Table 1.
Parameters and values of the finite-time PID SMC (35) in Scenarios 1 and 2.
4.1. Scenario 1
By selecting , the FO laser chaotic system (8) exhibits chaotic behavior [37]. To achieve control of the FO laser chaotic system (10), the parameters of the designed finite-time PID SMC (35) are applied, and Table 1 shows the control parameters. Also, the initial values are , , , and .
Moreover, the uncertainty terms for the system are chosen as , , , and
Furthermore, the non-linear function is defined as follows:
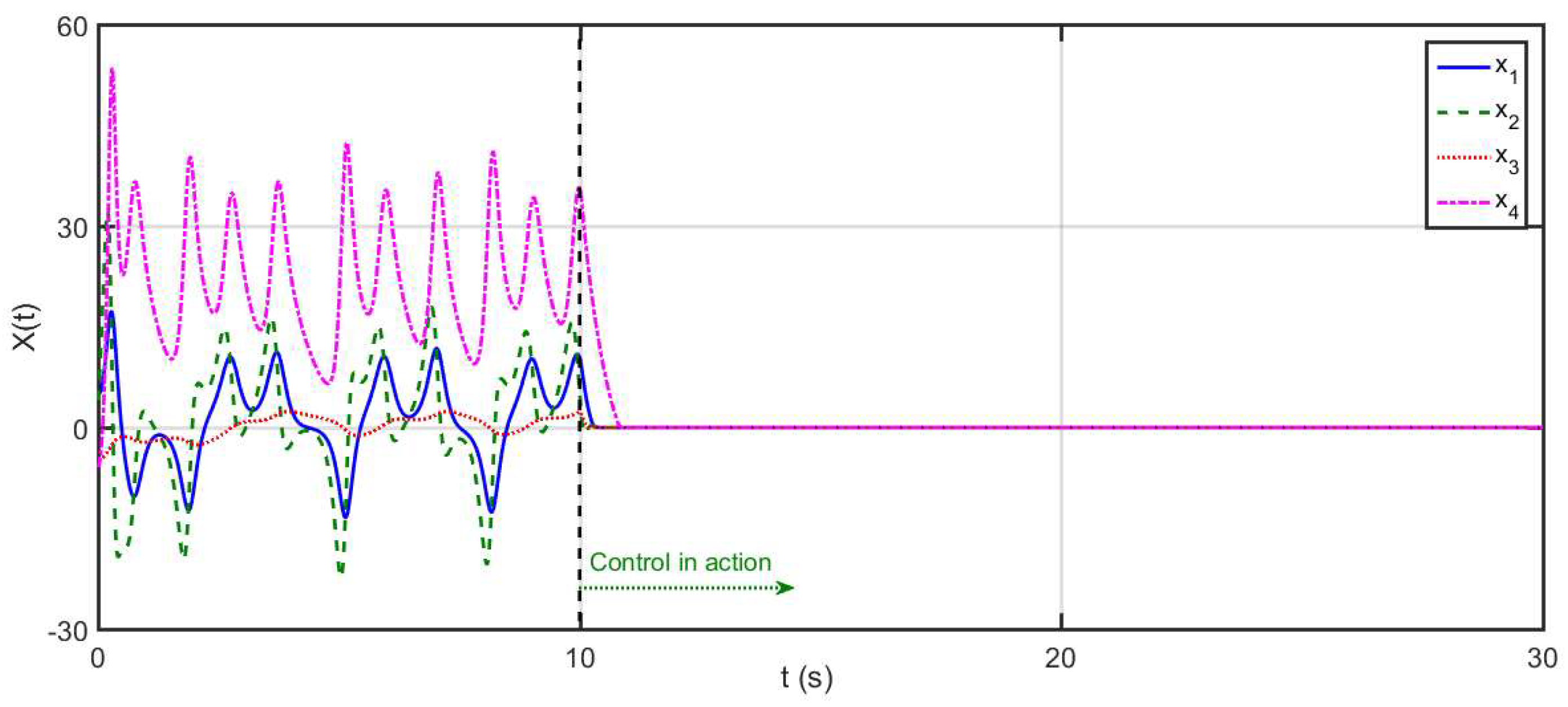
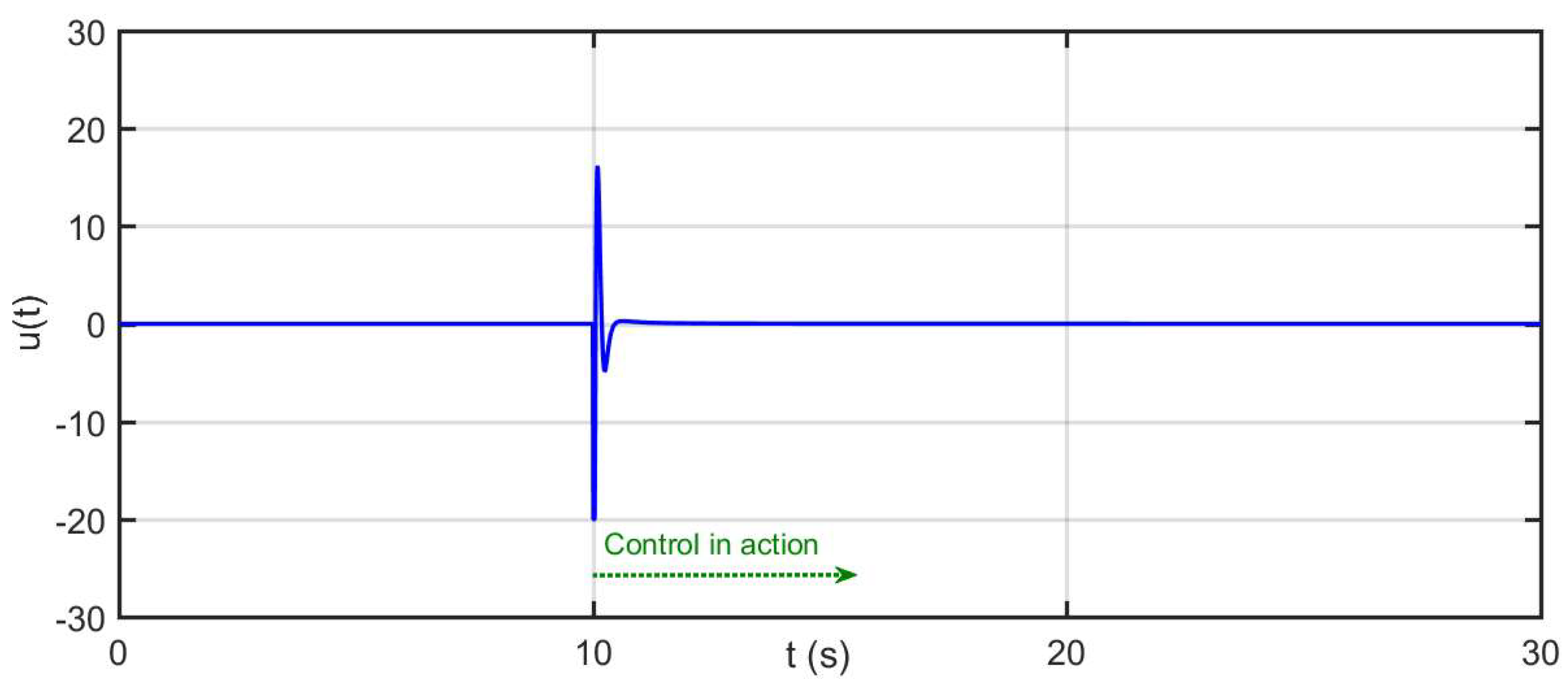
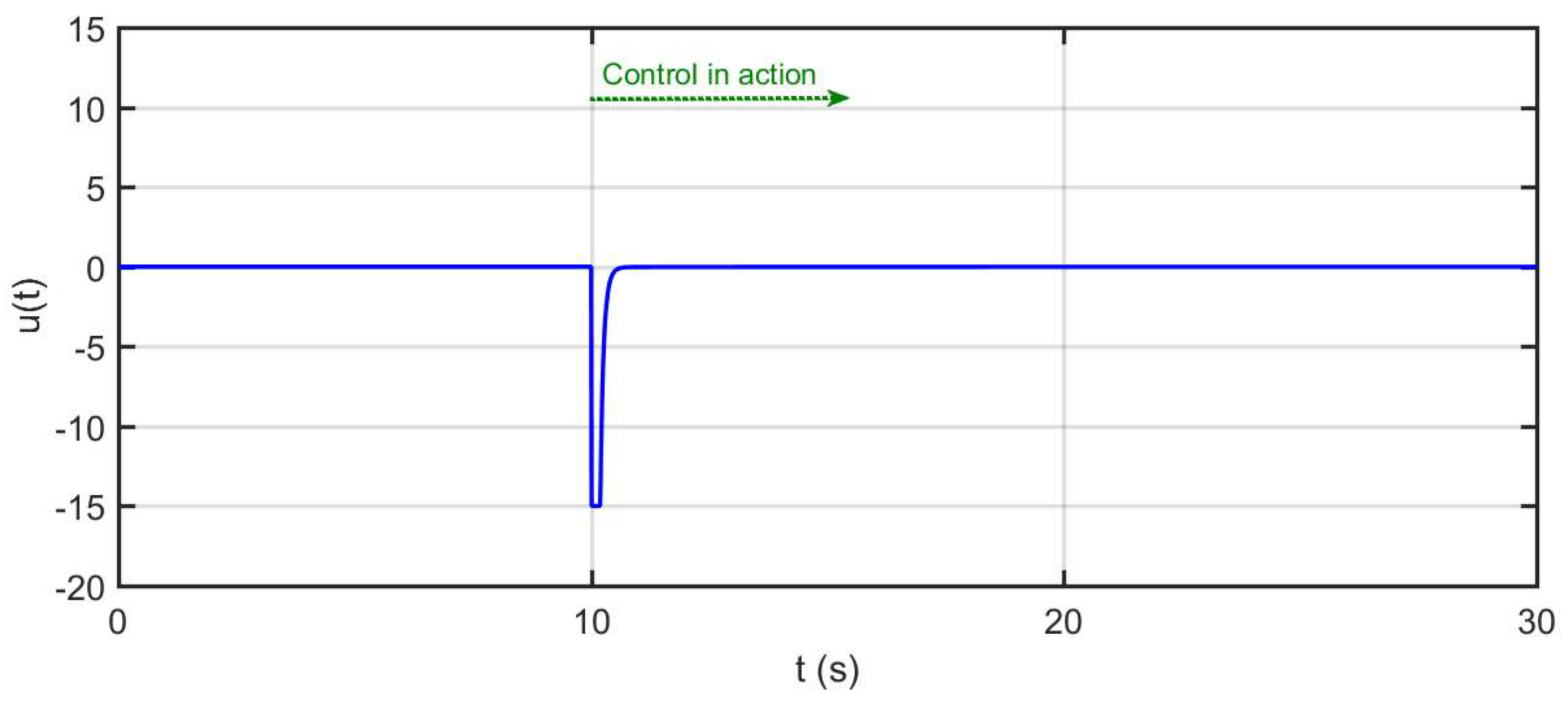
Plotting Figure 2 provides a visual representation of the effective stabilization of the chaotic FO laser systems (8). This stabilization is achieved through the utilization of the chattering-free–finite-time PID SMC (35). The graphical representation in Figure 2 unmistakably demonstrates the successful control of the previously unpredictable chaotic FO laser system (8). Furthermore, Figure 3 illustrates the chronological progression of the finite-time PID SMC (35). Notably, the control input (35) consistently approaches equilibrium without displaying any indications of the chattering phenomenon. This observation underscores the capability of the developed adaptive controller to effectively manage the 4-dimensional chaotic FO laser systems within a finite timeframe.
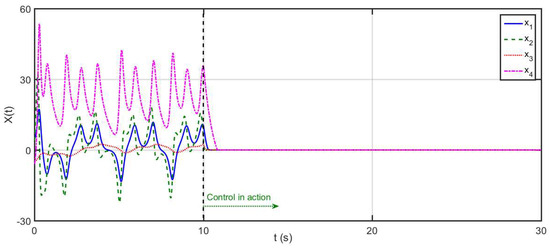
Figure 2.
The time evolution of the control of the of 4-dimensional chaotic FO laser system (8) for .
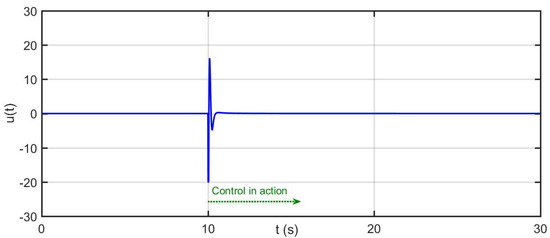
Figure 3.
The time evolution of the control inputs (35) to control of the of 4-dimensional chaotic FO laser system (8) for .
Additionally, as depicted in Figure 3, instances where the control law signal approach the saturation state’s boundaries trigger a suppression due to the saturation condition. Consequently, this dampens the occurrence of jumping phenomena. This attribute enables a smoother implementation of jumping states and switching states, especially when scenarios involve relays and specified saturation conditions.
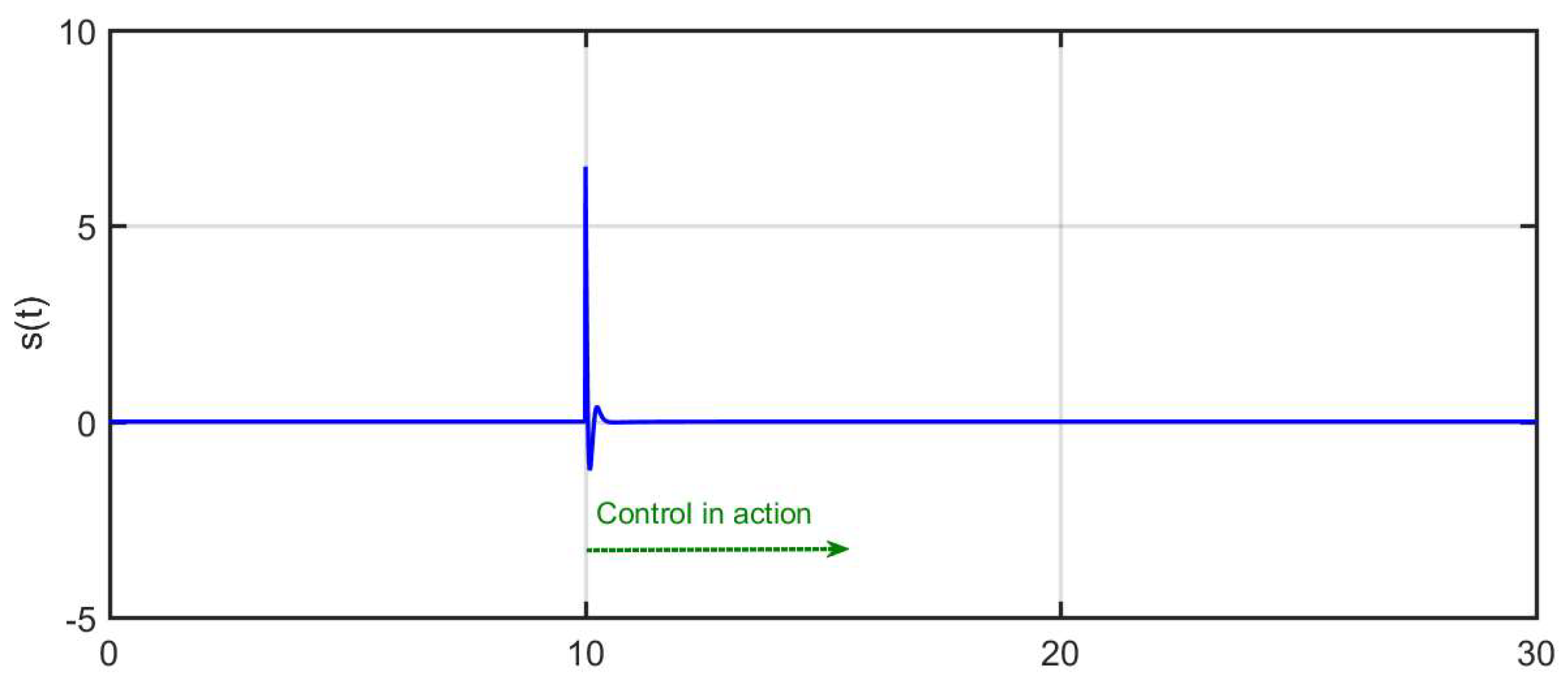
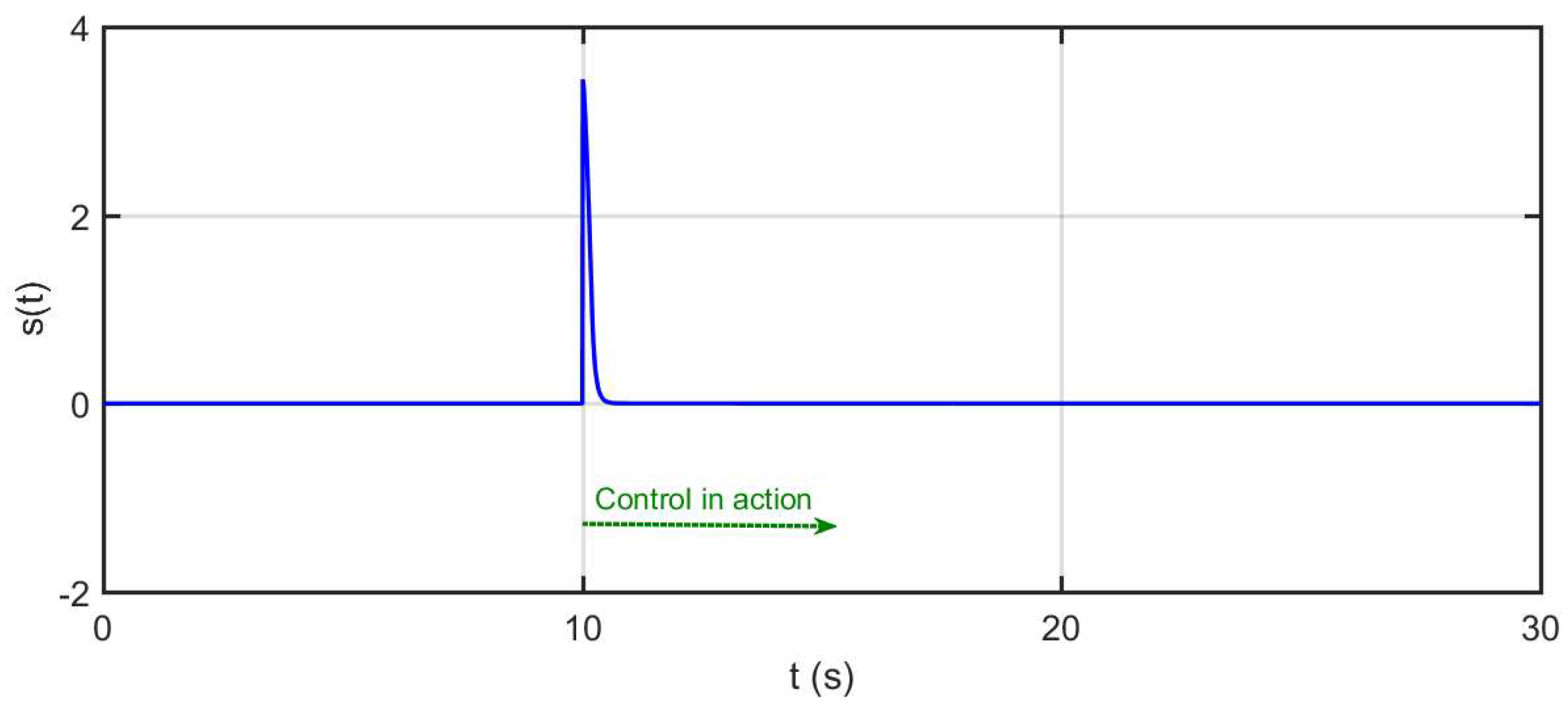
Furthermore, the Figure 4 portrays the temporal response of the stabilization method, denoted as SS (15), for the 4-dimensional chaotic FO laser system (8). Figure 4 compellingly indicates the gradual convergence of each parameter within the sliding surface (15) towards the origin. Importantly, no evidence of the chattering phenomenon is observed in the sliding surfaces.
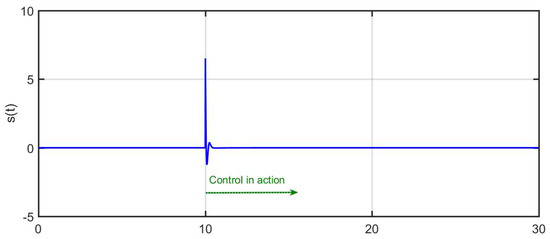
Figure 4.
The time evolution of the SS (15) to stabilize the 4-dimensional chaotic FO laser system (8) for .
4.2. Scenario 2
Here, selecting led to chaotic performance in the FO laser chaotic system (8) [37]. To achieve control of the FO laser chaotic system (10), the parameters of the designed finite-time PID SMC (35) are applied, and Table 1 shows the control parameters. Also, the initial values are , , , and .
Moreover, the uncertainty terms of the system for this example are chosen as , , , and
Moreover, the non-linear function is defined as follows:
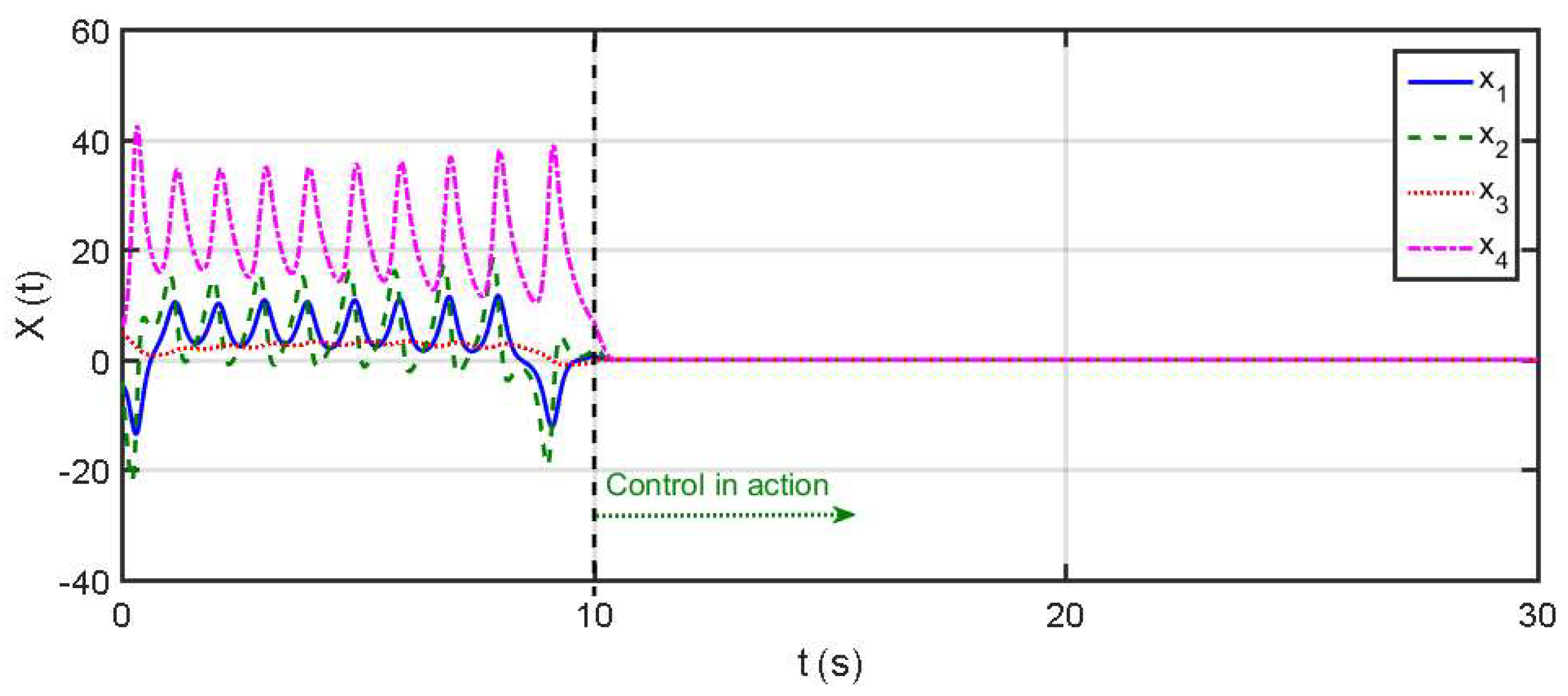
Illustrated in Figure 5 is the successful stabilization of the chaotic FO laser system (8) at κ = 0.97, accomplished through the implementation of the chattering-free–finite-time PID SMC (35). The visual representation in Figure 5 provides a clear demonstration of the effective control exerted over the previously turbulent behavior of the FO laser system (8).
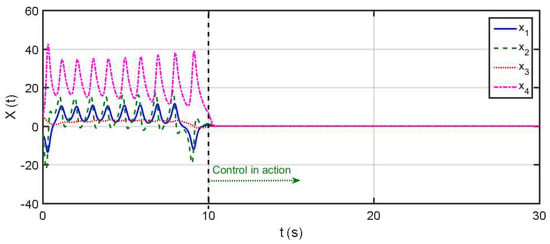
Figure 5.
The time evolution of the control of the of 4-dimensional chaotic FO laser system (8) for .
Furthermore, Figure 6 delves into the dynamic progression of the finite-time PID SMC (35), revealing its gradual approach towards equilibrium without any indications of chattering disruption. This observation underscores the proficiency of the adaptive controller in governing the intricate dynamics of the 4-dimensional chaotic FO laser system within a finite duration.
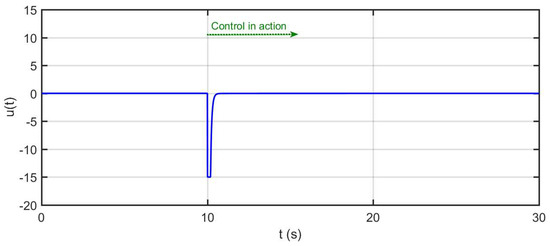
Figure 6.
The time evolution of the control inputs (35) to control of the of 4-dimensional chaotic FO laser system (8) for .
A noteworthy insight emerges from Figure 7: as the control input signals verge on the boundaries of saturation, the saturation condition intervenes, tempering their magnitude and thereby quelling abrupt fluctuations. This intriguing behavior facilitates the emergence of smooth transitions, such as jumping and switching states, particularly in scenarios involving relays and indicated saturation conditions.
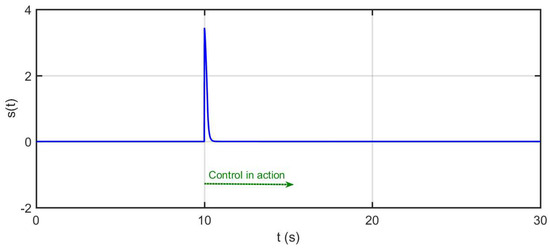
Figure 7.
The time evolution of the SS (15) to stabilize the 4-dimensional chaotic FO laser system (8) for .
Additionally, Figure 7 provides a temporal analysis of the stabilization mechanism characterized by the sliding surface (15) for the 4-dimensional chaotic FO laser system (8), employing both function and surface plots. Figure 7 strikingly portrays the incremental convergence of each parameter within the sliding surface (15) towards the origin, devoid of any indications of the chattering phenomenon.
Remark 14.
In the implementation of our chattering-free–finite-time PID SMC technique in real-world scenarios where precise control is of utmost importance, a systematic approach is recommended. Thorough system modeling and identification, with a focus on fractional-order dynamics, are carried out. Efficient real-time computation methods are employed, PID controllers are designed and meticulously tuned, and robustness analysis is conducted. Safety measures are incorporated, and the technique is validated through real-world experiments, with detailed documentation being maintained. Ensuring that the personnel possess the necessary expertise, continuous monitoring and optimization of the control system are performed. Adaptation to new challenges is anticipated, and expert consultation is sought when necessary. Following these guidelines will enable the successful application of our technique, ensuring stability and high-performance control in critical real-world scenarios.
Remark 15.
During the development and implementation of our control strategy, several challenges and limitations emerged that warrant discussion in the revised article. These include the necessity for accurate mathematical models to describe chaotic fractional-order laser systems and the selection of appropriate numerical techniques and considerations of their limitations. Furthermore, addressing the need for practical validation, potentially through real-world experiments or simulations, is crucial to enhance the strategy’s credibility and applicability. The complexities of tuning PID controllers for optimal performance also deserve attention, as do the implications of hardware choices on the method’s efficiency in real-time applications. Considering the generalizability of the approach beyond specific systems and acknowledging potential computational time challenges in time-sensitive scenarios are additional factors that should be discussed. By recognizing and addressing these challenges and limitations, the revised article can offer a more comprehensive perspective on the development and practical application of the control strategy.
Remark 16.
The efficacy of our control method in stabilizing chaotic fractional-order laser systems was assessed using key criteria: (1) Chattering Reduction: The method effectively reduced control signal fluctuations, minimizing chattering. (2) Finite-Time Stabilization: It successfully achieved finite-time control objectives, ensuring rapid system stabilization. (3) Steady-State Error: The controlled systems approached desired setpoints with minimal error. (4) Robustness: The method demonstrated resilience to disturbances and parameter variations. These criteria were met in the numerical scenarios, affirming the method’s success in chaotic system control.
Remark 17.
The two numerical scenarios in our study illustrate the practical value and effectiveness of our chattering-free–finite-time PID SMC technique. They show its real-world applicability in controlling chaotic fractional-order laser systems, emphasizing chattering reduction and the ability to achieve finite-time control objectives. These scenarios also compare the technique’s performance to traditional methods, highlighting its advantages in practical applications.
Remark 18.
Thess research findings have the potential to significantly impact real-world applications beyond theoretical research. The control technique we have developed offers practical implications in various domains and systems. For instance, in optical engineering it can enhance the control of laser systems used in medical devices, telecommunications, and material processing, leading to greater precision and performance. In aerospace and aviation, where chaotic systems are prevalent, our method can contribute to smoother and more stable flight control, ensuring safety and accuracy. Similarly, in robotics the reduction of chattering can improve the efficiency and precision of robotic motion control. Medical devices, energy systems, environmental monitoring, and financial markets are other domains where our technique can stabilize chaotic behavior, leading to more reliable and safe operations. Overall, our research findings hold promise for enhancing the performance and control of complex and dynamic systems in practical applications across various fields.
Remark 19.
There is considerable potential for the further refinement and extension of our control method in addressing more complex and diverse chaotic systems beyond the scope of this study. The core principles and techniques we have developed can serve as a solid foundation for tackling a broader range of challenges. For instance, refining the method to adapt dynamically to varying system dynamics, extending it to multi-agent systems, optimizing real-time implementation, and incorporating parameter estimation techniques are avenues for further development. Additionally, conducting practical experiments in real-world applications across various domains can help validate and enhance the method’s performance. Advanced control architectures and applications in human–machine interaction or environmental monitoring are other promising areas for future exploration. This ongoing research can pave the way for more versatile and practical applications of our control method in addressing the complexity of diverse chaotic systems.
Remark 20.
In the context of practical applications, significant implications are brought about by our research findings for engineers, researchers, and practitioners interested in the control of chaotic systems with fractional-order dynamics. Practical advantages are offered by the reduction of chattering and the achievement of finite-time control objectives, promoting the presence of smoother and more stable control signals and precise timing in various domains, including optical engineering, aerospace, and robotics. The versatility of our method allows for its adaptation to diverse applications, while the potential for real-world validation permits further refinement and effectiveness testing in specific systems. The enhanced stability provided is particularly valuable in applications where complex systems demand precise control, ensuring the safety and reliability of systems. Ultimately, innovation in the field of control techniques is encouraged by our research, opening up new possibilities for addressing the challenges posed by complex and dynamic systems.
Remark 21.
The proposed method distinguishes itself from existing control techniques in terms of its stability, performance, and applicability to various chaotic systems. It enhances stability by significantly reducing chattering in chaotic systems, resulting in smoother and more stable control signals that reduce mechanical wear. Moreover, the method excels in performance by achieving finite-time control objectives, a critical feature for applications with strict timing requirements. This advantage sets it apart from certain traditional control techniques that may not guarantee finite-time control, making it highly suitable for time-critical scenarios. The method’s versatility allows it to be applied to a wide range of chaotic systems with fractional-order dynamics, including domains such as optical engineering, aerospace, and robotics, making it a practical and adaptable choice for diverse applications.
Remark 22.
The alignment of our research outcomes with current trends and developments in the field of fractional-order systems and control is observed, accompanied by novel insights and contributions. The chattering reduction, a significant outcome, addresses the prevailing issue of chattering in control systems, which is vital for applications demanding smooth and precise control. Achieving finite-time control objectives corresponds with the growing requirement for time-critical applications in various domains. Our control method’s versatility and adaptability to diverse chaotic systems with fractional-order dynamics align with the current trend of developing universally applicable control techniques. The emphasis on real-world validation and application reflects the shift towards practical implementation and validation of control techniques in diverse scenarios. Furthermore, our research contributes novel insights by demonstrating the efficacy of fractional-order control techniques in chaotic systems, inspiring further exploration in the application of fractional calculus in control theory.
Remark 23.
The findings and methodologies presented in our study have the potential to stimulate interdisciplinary collaborations and inspire future research directions across various domains. Collaboration with medical researchers can explore the application of fractional-order control in medical devices and therapies, including drug delivery systems and patient-specific treatments. Environmental scientists and engineers can adapt our methodologies for environmental monitoring, climate modeling, and pollution control, while focusing on improving data accuracy and stability. Interdisciplinary research with experts in autonomous systems and robotics can lead to innovations in autonomous vehicles and robotic systems. Collaborations with advanced manufacturing experts can enhance control in 3D printing and machining processes. Additionally, collaborations with energy experts can explore the application of our techniques in stabilizing energy systems, while cooperation with control theorists can lead to advancements in fractional-order control theory. By applying our techniques to various domains, complex control challenges can be addressed, and advancements in these fields can be facilitated.
Remark 24.
This work, focusing on the stabilization of chaotic fractional-order laser systems, stands out in its ability to address disturbances when compared to previous works [42,43]. It offers a specialized solution tailored to the unique challenges presented by this specific class of systems. Notably, our paper introduces an innovative approach to eliminate chattering, a common issue in control systems. This is achieved by transforming the control input’s sign function into the fractional derivative, resulting in a smooth and chattering-free control input, a feature not found in previous works [42,43]. Moreover, our work leverages fractional-order Lyapunov stability theory, ensuring system stability even in the presence of disturbances, a theoretical foundation that distinguishes it from previous works [42,43]. Additionally, it provides practical validation through numerical scenarios, demonstrating the real-world applicability of its disturbance-handling methods and underscoring its robustness in the context of chaotic fractional-order laser systems.
5. Discussion and Conclusions
In this study, a novel single-input finite-time PID sliding mode control (SMC) technique has been presented, aimed at stabilizing a specific group of unknown 4-dimensional chaotic FO laser mechanisms. Through the combination of the PID concept with the FO-version of the Lyapunov stability theory, a new finite-time PID SMC strategy has been developed, effectively addressing chaotic behavior in the aforementioned unknown 4-dimensional chaotic FO laser system. The utilization of the boundedness characteristic inherent in FO chaotic systems is a distinctive aspect of this approach, making it well-suited for practical implementation. Furthermore, notable advancement in this method involves the transformation of the control input’s sign function, responsible for undesirable chattering, into the fractional derivative of the control input. This transformation results in a smooth and chattering-free control input, further enhancing the performance of the method. To demonstrate the effectiveness of the proposed chattering-free–finite-time PID SMC technique, two numerical scenarios have been presented, providing compelling evidence of its capability in stabilizing the unknown 4-dimensional chaotic FO laser system. These scenarios serve as illustrative examples, highlighting the method’s potential for practical applications in controlling chaotic systems.
Author Contributions
Conceptualization, M.R.; Methodology, M.R., S.M. and A.B.-O.; Software, M.R.; Validation, A.B.-O.; Formal analysis, M.R.; Resources, A.B.-O.; Writing—original draft, M.R.; Writing—review & editing, S.M. and A.B.-O.; Supervision, A.B.-O. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Taheri, M.; Chen, Y.; Zhang, C.; Berardehi, Z.R.; Roohi, M.; Khooban, M.H. A finite-time sliding mode control technique for synchronization chaotic fractional-order laser systems with application on encryption of color images. Optik 2023, 285, 170948. [Google Scholar] [CrossRef]
- Colet, P.; Roy, R. Digital communication with synchronized chaotic lasers. Opt. Lett. 1994, 19, 2056–2058. [Google Scholar] [CrossRef] [PubMed]
- Trujillo, J.J.; Scalas, E.; Diethelm, K.; Baleanu, D. Fractional Calculus: Models and Numerical Methods; World Scientific: Singapore, 2016; Volume 5. [Google Scholar]
- Delavari, H.; Heydarinejad, H.; Baleanu, D. Adaptive fractional-order blood glucose regulator based on high-order sliding mode observer. IET Syst. Biol. 2019, 13, 43–54. [Google Scholar] [CrossRef]
- Roohi, M.; Zhang, C.; Chen, Y. Adaptive model-free synchronization of different fractional-order neural networks with an application in cryptography. Nonlinear Dyn. 2020, 100, 3979–4001. [Google Scholar] [CrossRef]
- Roohi, M.; Zhang, C.; Taheri, M.; Basse-O’Connor, A. Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control. Fractal Fract. 2023, 7, 682. [Google Scholar] [CrossRef]
- Saad, K. Comparing the Caputo, Caputo-Fabrizio and Atangana-Baleanu derivative with fractional order: Fractional cubic isothermal auto-catalytic chemical system. Eur. Phys. J. Plus 2018, 133, 94. [Google Scholar] [CrossRef]
- Yousefpour, A.; Jahanshahi, H.; Munoz-Pacheco, J.M.; Bekiros, S.; Wei, Z. A fractional-order hyper-chaotic economic system with transient chaos. Chaos Solitons Fractals 2020, 130, 109400. [Google Scholar] [CrossRef]
- Song, L.; Xu, S.; Yang, J. Dynamical models of happiness with fractional order. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 616–628. [Google Scholar] [CrossRef]
- Alikhanov, A.A.; Asl, M.S.; Huang, C.; Khibiev, A. A second-order difference scheme for the nonlinear time-fractional diffusion-wave equation with generalized memory kernel in the presence of time delay. J. Comput. Appl. Math. 2023, 438, 115515. [Google Scholar] [CrossRef]
- Roohi, M.; Khooban, M.-H.; Esfahani, Z.; Aghababa, M.P.; Dragicevic, T. A switching sliding mode control technique for chaos suppression of fractional-order complex systems. Trans. Inst. Meas. Control 2019, 41, 2932–2946. [Google Scholar] [CrossRef]
- Rasooli Berardehi, Z.; Zhang, C.; Taheri, M.; Roohi, M.; Khooban, M.H. Implementation of T-S fuzzy approach for the synchronization and stabilization of non-integer-order complex systems with input saturation at a guaranteed cost. Trans. Inst. Meas. Control 2023, 45, 2536–2553. [Google Scholar] [CrossRef]
- Rasooli Berardehi, Z.; Zhang, C.; Taheri, M.; Roohi, M.; Khooban, M.H. A Fuzzy Control Strategy to Synchronize Fractional-Order Nonlinear Systems Including Input Saturation. Int. J. Intell. Syst. 2023, 2013, 1550256. [Google Scholar] [CrossRef]
- Al-Dhaifallah, M. Fuzzy fractional-order PID control for heat exchanger. Alex. Eng. J. 2023, 63, 11–16. [Google Scholar] [CrossRef]
- Alsubaie, H.; Yousefpour, A.; Alotaibi, A.; Alotaibi, N.D.; Jahanshahi, H. Stabilization of Nonlinear Vibration of a Fractional-Order Arch MEMS Resonator Using a New Disturbance-Observer-Based Finite-Time Sliding Mode Control. Mathematics 2023, 11, 978. [Google Scholar] [CrossRef]
- Roohi, M.; Aghababa, M.P.; Haghighi, A.R. Switching adaptive controllers to control fractional-order complex systems with unknown structure and input nonlinearities. Complexity 2015, 21, 211–223. [Google Scholar] [CrossRef]
- Rabiei, K.; Razzaghi, M. An approach to solve fractional optimal control problems via fractional-order Boubaker wavelets. J. Vib. Control 2023, 29, 1806–1819. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Sangeetha, G. Second-order sliding mode control for nonlinear fractional-order systems. Appl. Math. Comput. 2020, 383, 125264. [Google Scholar] [CrossRef]
- Wang, J.; Shao, C.; Chen, Y.-Q. Fractional order sliding mode control via disturbance observer for a class of fractional order systems with mismatched disturbance. Mechatronics 2018, 53, 8–19. [Google Scholar] [CrossRef]
- Balamash, A.; Bettayeb, M.; Djennoune, S.; Al-Saggaf, U.; Moinuddin, M. Fixed-time terminal synergetic observer for synchronization of fractional-order chaotic systems. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 073124. [Google Scholar] [CrossRef]
- Li, G.; Zhang, X.; Yang, H. Complexity analysis and synchronization control of fractional-order Jafari-Sprott chaotic system. IEEE Access 2020, 8, 53360–53373. [Google Scholar] [CrossRef]
- Modiri, A.; Mobayen, S. Adaptive terminal sliding mode control scheme for synchronization of fractional-order uncertain chaotic systems. ISA Trans. 2020, 105, 33–50. [Google Scholar] [CrossRef]
- Song, X.; Song, S.; Balsera, I.T.; Liu, L.; Zhang, L. Synchronization of two fractional-order chaotic systems via nonsingular terminal fuzzy sliding mode control. J. Control Sci. Eng. 2017, 2017, 9562818. [Google Scholar] [CrossRef]
- Sun, Z. Synchronization of fractional-order chaotic systems with non-identical orders, unknown parameters and disturbances via sliding mode control. Chin. J. Phys. 2018, 56, 2553–2559. [Google Scholar] [CrossRef]
- Shao, K.; Xu, Z.; Wang, T. Robust finite-time sliding mode synchronization of fractional-order hyper-chaotic systems based on adaptive neural network and disturbances observer. Int. J. Dyn. Control 2021, 9, 541–549. [Google Scholar] [CrossRef]
- Sabzalian, M.H.; Mohammadzadeh, A.; Lin, S.; Zhang, W. Robust fuzzy control for fractional-order systems with estimated fraction-order. Nonlinear Dyn. 2019, 98, 2375–2385. [Google Scholar] [CrossRef]
- Babu, N.R.; Kalpana, M.; Balasubramaniam, P. A novel audio encryption approach via finite-time synchronization of fractional order hyperchaotic system. Multimed. Tools Appl. 2021, 80, 18043–18067. [Google Scholar] [CrossRef]
- Zhang, L.; Zhong, J.; Lu, J. Intermittent control for finite-time synchronization of fractional-order complex networks. Neural Netw. 2021, 144, 11–20. [Google Scholar] [CrossRef]
- Haghighi, A.; Ziaratban, R. A non-integer sliding mode controller to stabilize fractional-order nonlinear systems. Adv. Differ. Equ. 2020, 2020, 503. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier Science: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Li, C.; Deng, W. Remarks on fractional derivatives. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Wang, H.; Han, Z.-Z.; Xie, Q.-Y.; Zhang, W. Finite-time chaos control via nonsingular terminal sliding mode control. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 2728–2733. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- Natiq, H.; Said, M.R.M.; Al-Saidi, N.M.G.; Kilicman, A. Dynamics and Complexity of a New 4D Chaotic Laser System. Entropy 2019, 21, 34. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Mou, J.; Ma, C.; Cao, Y. Dynamic analysis of an improper fractional-order laser chaotic system and its image encryption application. Opt. Lasers Eng. 2020, 129, 106031. [Google Scholar] [CrossRef]
- Curran, P.; Chua, L. Absolute stability theory and the synchronization problem. Int. J. Bifurc. Chaos 1997, 7, 1375–1382. [Google Scholar] [CrossRef]
- Fradkov, A.L.; Evans, R.J. Control of chaos: Methods and applications in engineering. Annu. Rev. Control 2005, 29, 33–56. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A Predictor-Corrector Approach for the Numerical Solution of Fractional Differential Equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Asl, M.S.; Javidi, M. An improved PC scheme for nonlinear fractional differential equations: Error and stability analysis. J. Comput. Appl. Math. 2017, 324, 101–117. [Google Scholar] [CrossRef]
- Asl, M.S.; Javidi, M.; Yan, Y. High order algorithms for numerical solution of fractional differential equations. Adv. Differ. Equ. 2021, 2021, 111. [Google Scholar] [CrossRef]
- Tu Vu, V.; Pham, T.L.; Dao, P.N. Disturbance observer-based adaptive reinforcement learning for perturbed uncertain surface vessels. ISA Trans. 2022, 130, 277–292. [Google Scholar] [CrossRef]
- Yang, J.; Li, T.; Liu, C.; Li, S.; Chen, W.H. Nonlinearity Estimator-Based Control of A Class of Uncertain Nonlinear Systems. IEEE Trans. Autom. Control 2020, 65, 2230–2236. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).