
Hopf Bifurcation in a Predator–Prey Model with Memory Effect in Predator and Anti-Predator Behaviour in Prey


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Stability Analysis
- The model (2) always has two boundary equilibriums and .
- Case I: . The model (2) always has no positive equilibrium.
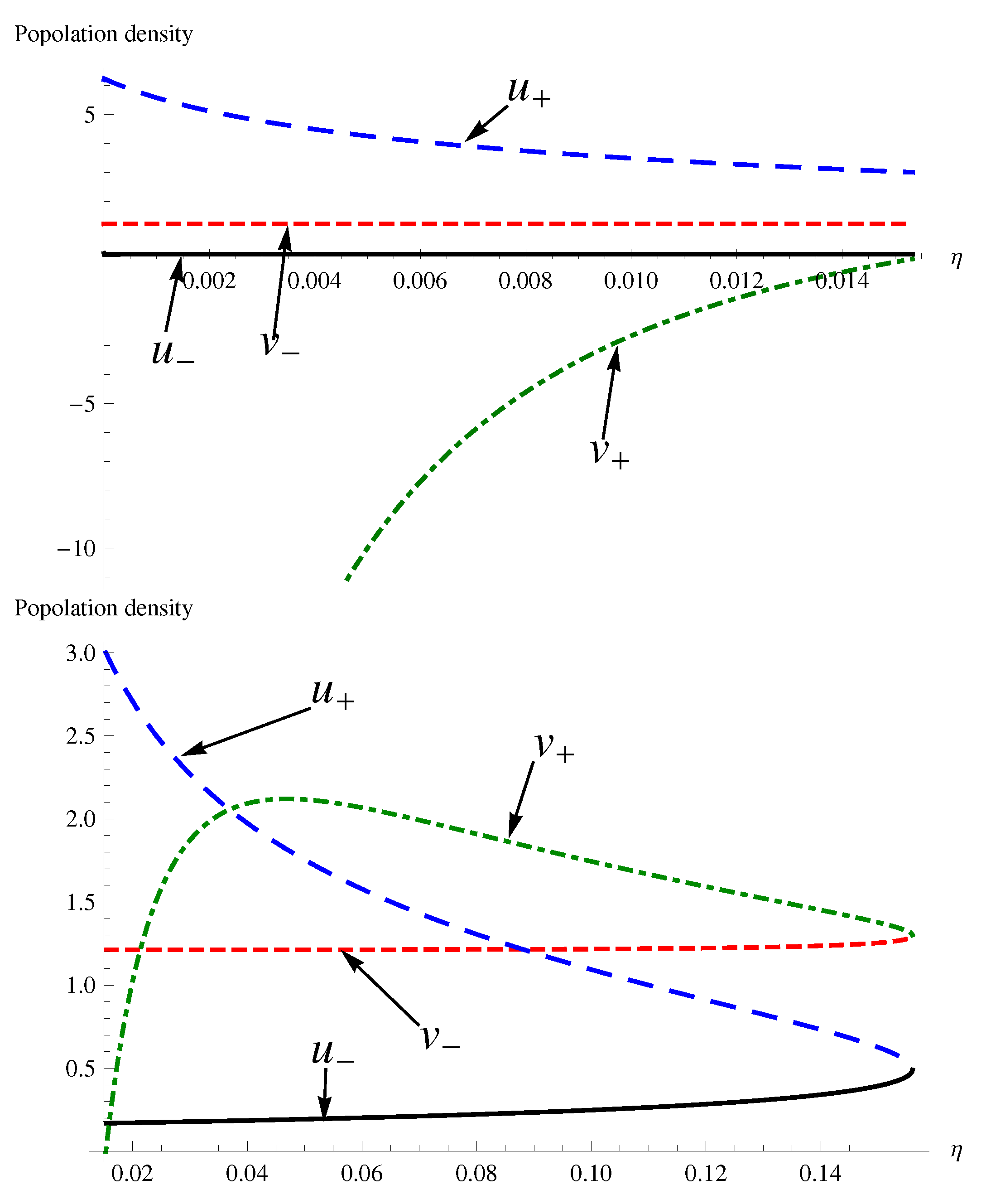
- Case II: .
- ★
- Subcase I: The model (2) always has no positive equilibrium when .
- ★
- Subcase II: The model (2) has two positive equilibria and when and .
- ★
- Subcase III: The model (2) has a unique positive equilibrium when and .
- ★
- Subcase IV: The model (2) has a unique positive equilibrium = when .
2.1.
2.2.
- is locally stable for when .
- is locally stable for when .
- is unstable for for some when .
- , , are Hopf bifurcation points.
3. Property of Hopf Bifurcation
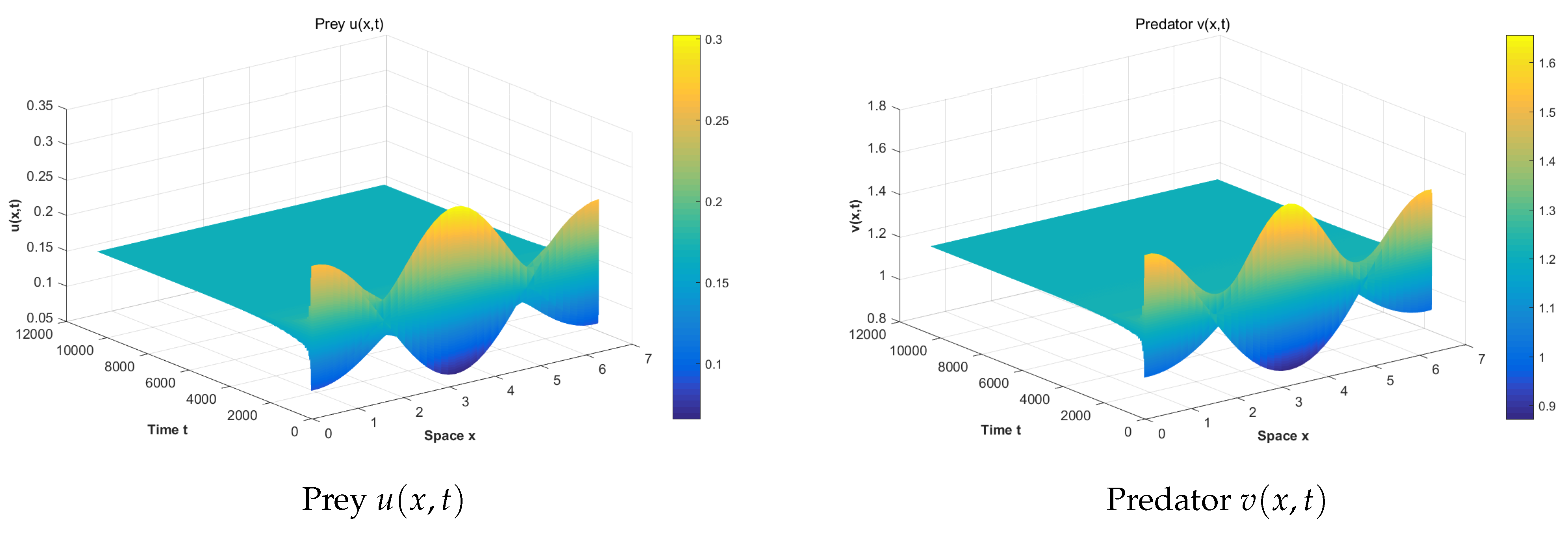
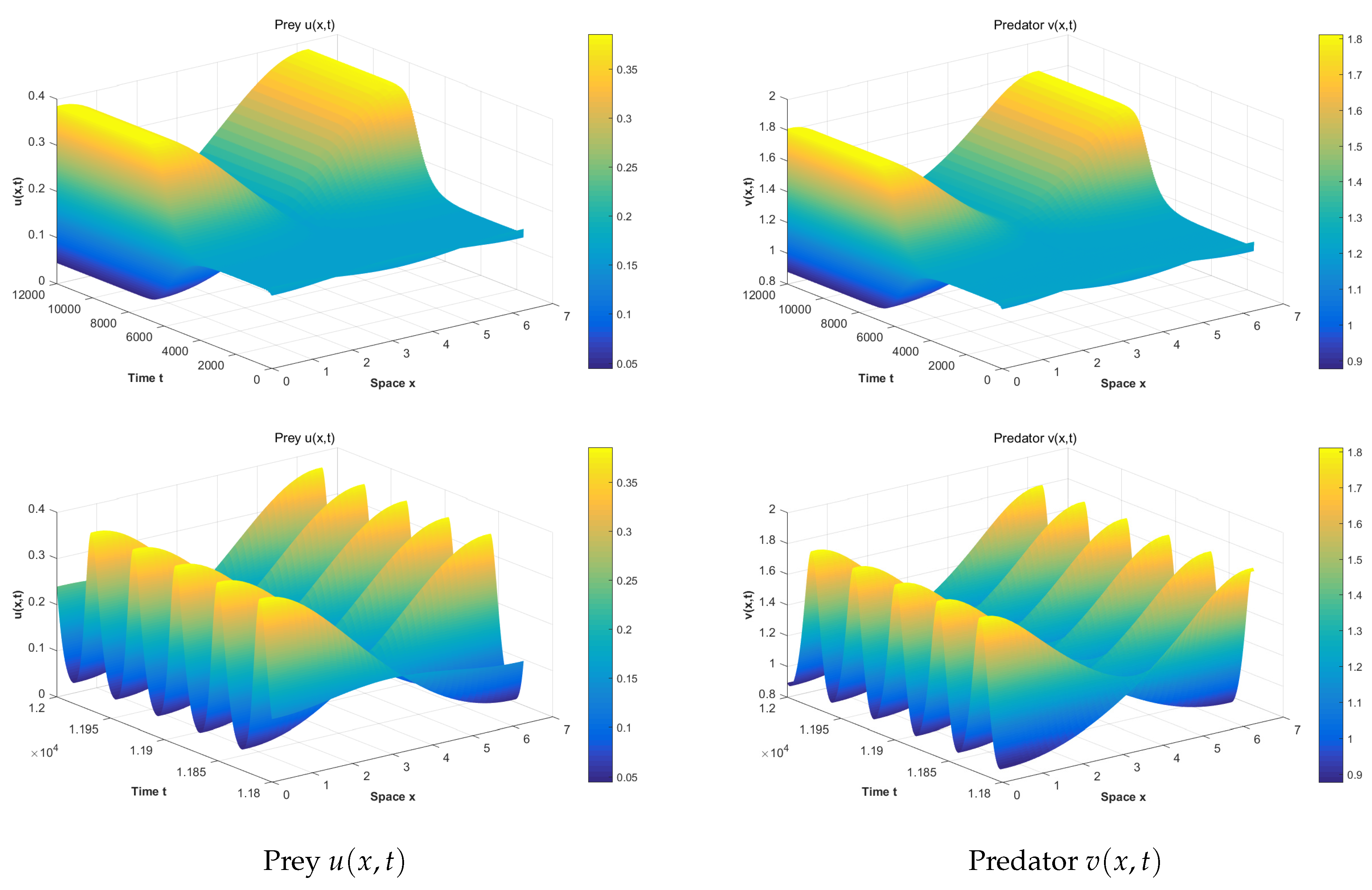
4. Numerical Simulations
4.1. The Effect of Anti-Predator Behaviour
4.2. The Effect of Memory-Based Diffusion
4.3. The Effect of Memory Delay
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Computation of Normal Form
References
- Yang, R.; Nie, C.; Jin, D. Spatiotemporal dynamics induced by nonlocal competition in a diffusive predator-prey system with habitat complexity. Nonlinear Dyn. 2022, 110, 879–900. [Google Scholar] [CrossRef]
- Yang, R.; Wang, F.; Jin, D. Spatially inhomogeneous bifurcating periodic solutions induced by nonlocal competition in a predator-prey system with additional food. Math. Methods Appl. Sci. 2022, 45, 9967–9978. [Google Scholar] [CrossRef]
- Tan, Y.; Cai, Y.; Yao, R.; Hu, M.; Wang, W. Complex dynamics in an eco-epidemiological model with the cost of anti-predator behaviors. Nonlinear Dyn. 2022, 107, 3127–3141. [Google Scholar] [CrossRef]
- Xiang, A.; Wang, L. Boundedness of a predator-prey model with density-dependent motilities and stage structure for the predator. Electron. Res. Arch. 2022, 30, 1954–1972. [Google Scholar] [CrossRef]
- Shang, Z.; Qiao, Y. Bifurcation analysis of a Leslie-type predator-prey system with simplified Holling type IV functional response and strong Allee effect on prey. Nonlinear Anal. Real World Appl. 2022, 64, 103453. [Google Scholar] [CrossRef]
- Yang, R.; Jin, D.; Wang, W. A diffusive predator-prey model with generalist predator and time delay. Aims Math. 2022, 7, 4574–4591. [Google Scholar] [CrossRef]
- Tripathi, J.P.; Bugalia, S.; Jana, D.; Gupta, N.; Tiwari, V.; Li, J.; Sun, G.-Q. Modeling the cost of anti-predator strategy in a predator-prey system: The roles of indirect effect. Math. Methods Appl. Sci. 2021, 45, 4365–4396. [Google Scholar] [CrossRef]
- Pimenov, A.; Kelly, T.C.; Korobeinikov, A.; O’Callaghan, M.J.; Rachinskii, D. Memory and adaptive behavior in population dynamics: Anti-predator behavior as a case study. J. Math. Biol. 2017, 74, 1533–1559. [Google Scholar] [CrossRef]
- Tang, B.; Xiao, Y. Bifurcation analysis of a predator-prey model with anti-predator behaviour. Chaos Solitons Fractals 2015, 70, 58–68. [Google Scholar] [CrossRef]
- Lima, S.L. Stress and decision-making under the risk of predation: Recent developments from behavioral, reproductive, and ecological perspectives. Adv. Study Behav. 1998, 27, 215–290. [Google Scholar]
- Relyea, R.A. How prey respond to combined predators: A review and an empirical test. Ecology 2003, 84, 1827–1839. [Google Scholar] [CrossRef]
- Choh, Y.; Lgnacio, M.; Sabelis, M.W.; Janssen, A. Predator-prey role reversals, juvenile experience and adult antipredator behaviour. Sci. Rep. 2012, 2, 728. [Google Scholar] [CrossRef] [Green Version]
- Saitō, Y. Prey kills predator: Counter-attack success of a spider mite against its specific phytoseiid predator. Exp. Appl. Acarol. 1986, 2, 47–62. [Google Scholar] [CrossRef]
- Prasad, K.D.; Prasad, B.S.R.V. Qualitative analysis of additional food provided predator-prey system with anti-predator behaviour in prey. Nonlinear Dyn. 2019, 96, 1765–1793. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, M.; Jia, M. A delayed predator-prey model with prey population guided anti-predator behaviour and stage structure. J. Appl. Anal. Comput. 2021, 11, 1811–1824. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, X. Stability and Hopf bifurcation of a delayed reaction-diffusion predator-prey model with anti-predator behaviour. Nonlinear Anal. Model. Control 2019, 24, 387–406. [Google Scholar] [CrossRef]
- Yang, R.; Ma, J. Analysis of a diffusive predator-prey system with anti-predator behaviour and maturation delay. Chaos Solitons Fractals 2018, 109, 128–139. [Google Scholar] [CrossRef]
- Yang, R.; Zhao, X.; An, Y. Dynamical Analysis of a Delayed Diffusive Predator-Prey Model with Additional Food Provided and Anti-Predator Behavior. Mathematics 2022, 10, 469. [Google Scholar] [CrossRef]
- Yang, R.; Song, Q.; An, Y. Spatiotemporal Dynamics in a Predator-Prey Model with Functional Response Increasing in Both Predator and Prey Densities. Mathematics 2022, 10, 17. [Google Scholar] [CrossRef]
- Fagan, W.F.; Lewis, M.A.; Auger-Méthé, M.; Avgar, T.; Benhamou, S.; Breed, G.; LaDage, L.; Schlägel, U.E.; Tang, W.-W.; Papastamatiou, Y.P.; et al. Spatial memory and animal movement. Ecol. Lett. 2014, 16, 1316–1329. [Google Scholar] [CrossRef]
- Shi, J.; Wang, C.; Wang, H.; Yan, X. Diffusive Spatial Movement with Memory. J. Dyn. Differ. Equ. 2020, 32, 979–1002. [Google Scholar] [CrossRef]
- An, Q.; Wang, C.; Wang, H. Analysis of a spatial memory model with nonlocal maturation delay and hostile boundary condition. Discret. Contin. Dyn. Syst. 2020, 40, 5845–5868. [Google Scholar] [CrossRef]
- Shi, J.; Wang, C.; Wang, H. Diffusive spatial movement with memory and maturation delays. Nonlinearity 2019, 32, 3188–3208. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; Shi, J.; Wang, H. Spatial movement with distributed delay. J. Math. Biol. 2021, 82, 33. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Wu, S.; Wang, H. Spatiotemporal dynamics in the single population model with memory-based diffusion and nonlocal effect. J. Differ. Equ. 2019, 267, 6316–6351. [Google Scholar] [CrossRef]
- Song, Y.; Peng, Y.; Zhang, T. The spatially inhomogeneous Hopf bifurcation induced by memory delay in a memory-based diffusion system. J. Differ. Equ. 2021, 300, 597–624. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Jin, D.; Yang, R. Hopf Bifurcation in a Predator–Prey Model with Memory Effect in Predator and Anti-Predator Behaviour in Prey. Mathematics 2023, 11, 556. https://doi.org/10.3390/math11030556
Zhang W, Jin D, Yang R. Hopf Bifurcation in a Predator–Prey Model with Memory Effect in Predator and Anti-Predator Behaviour in Prey. Mathematics. 2023; 11(3):556. https://doi.org/10.3390/math11030556
Chicago/Turabian StyleZhang, Wenqi, Dan Jin, and Ruizhi Yang. 2023. "Hopf Bifurcation in a Predator–Prey Model with Memory Effect in Predator and Anti-Predator Behaviour in Prey" Mathematics 11, no. 3: 556. https://doi.org/10.3390/math11030556