
On Cauchy Problems of Caputo Fractional Differential Inclusion with an Application to Fractional Non-Smooth Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (i)
- For any , the set is a non-empty closed set and ;
- (ii)
- For any and open set such that , there exists an open neighborhood of w such that .
- (i)
- is measurable for each ;
- (ii)
- is upper semi-continuous for almost all .
- (a)
- Fix;
- (b)
- There exist and such that ,
3. Proof of the Existence of Solutions
- (D1)
- is a Carathéodory map;
- (D2)
- There exist a bounded and a bounded such that
- (D2’)
- There exist such that
- (D3)
- is the map for which is measurable for ;
- (D4)
- There exists a bounded such that the following inequalities hold, where for .
4. Proof of the Uniqueness of Solutions
- (D5)
- For and , , there exists such that
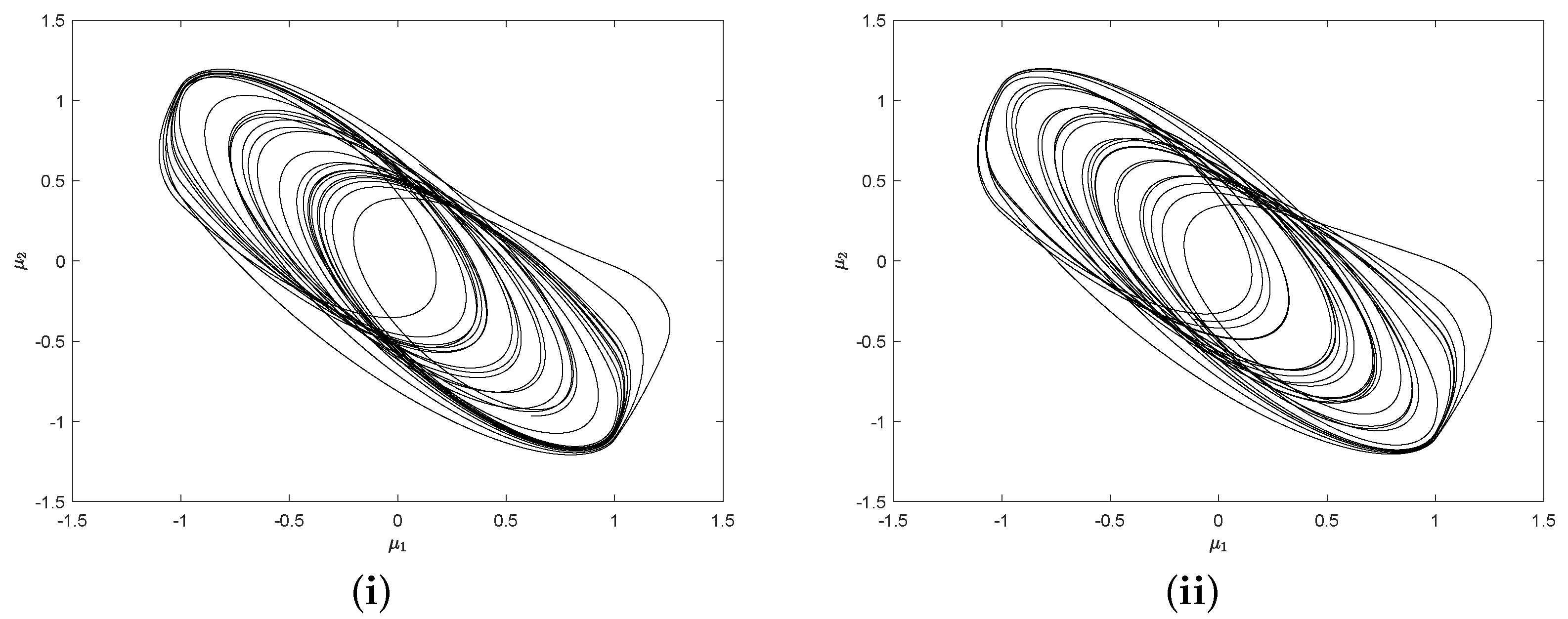
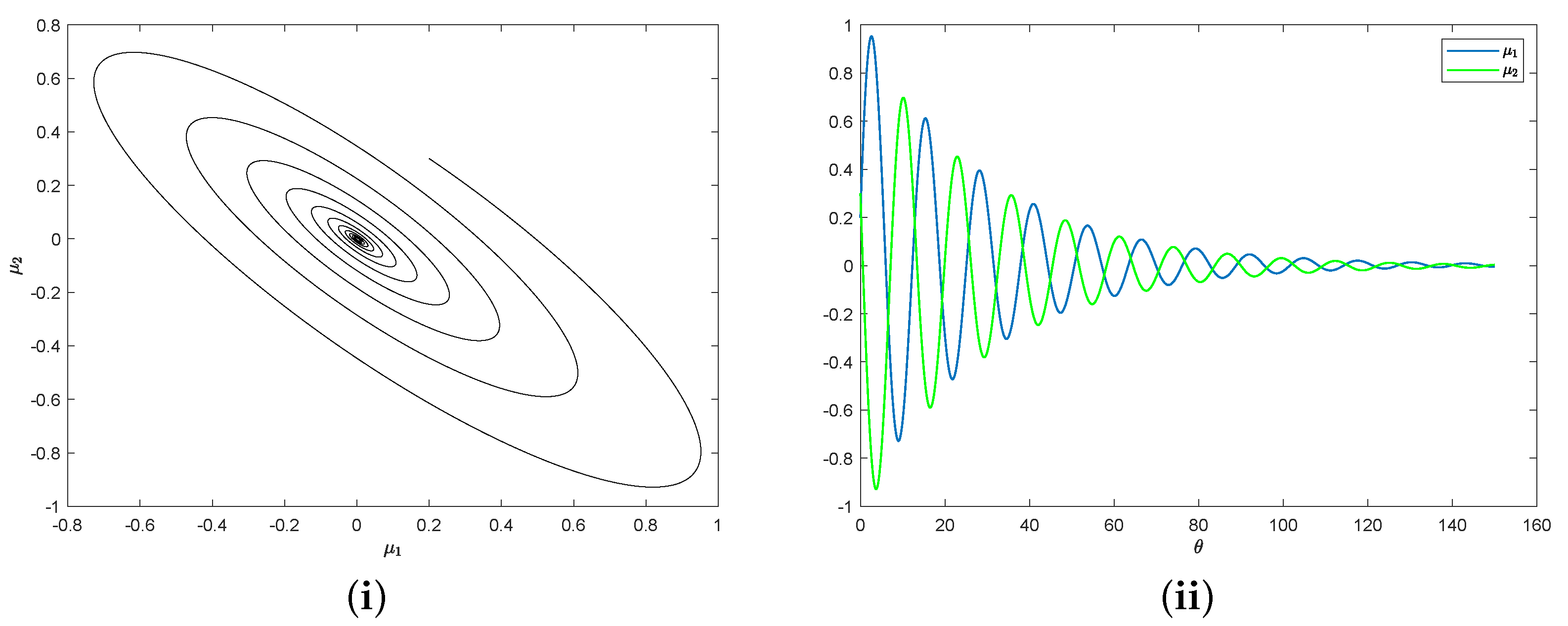
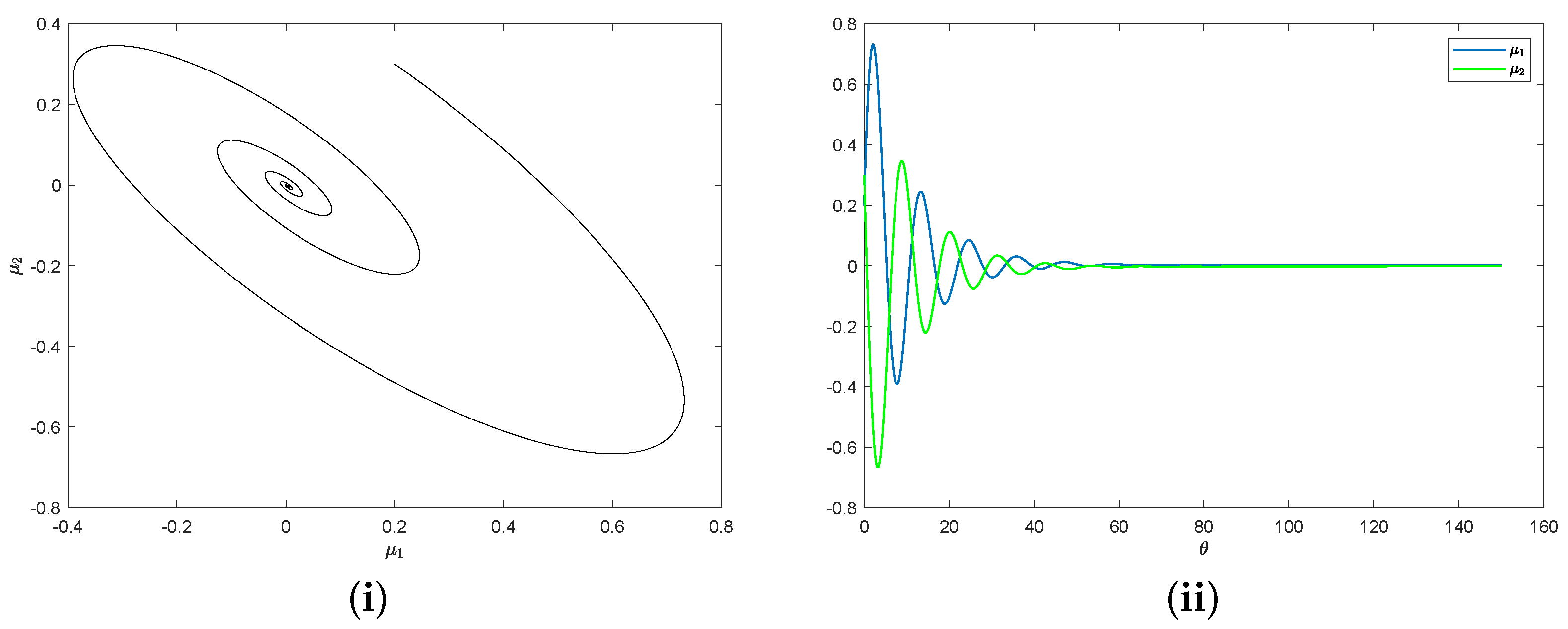
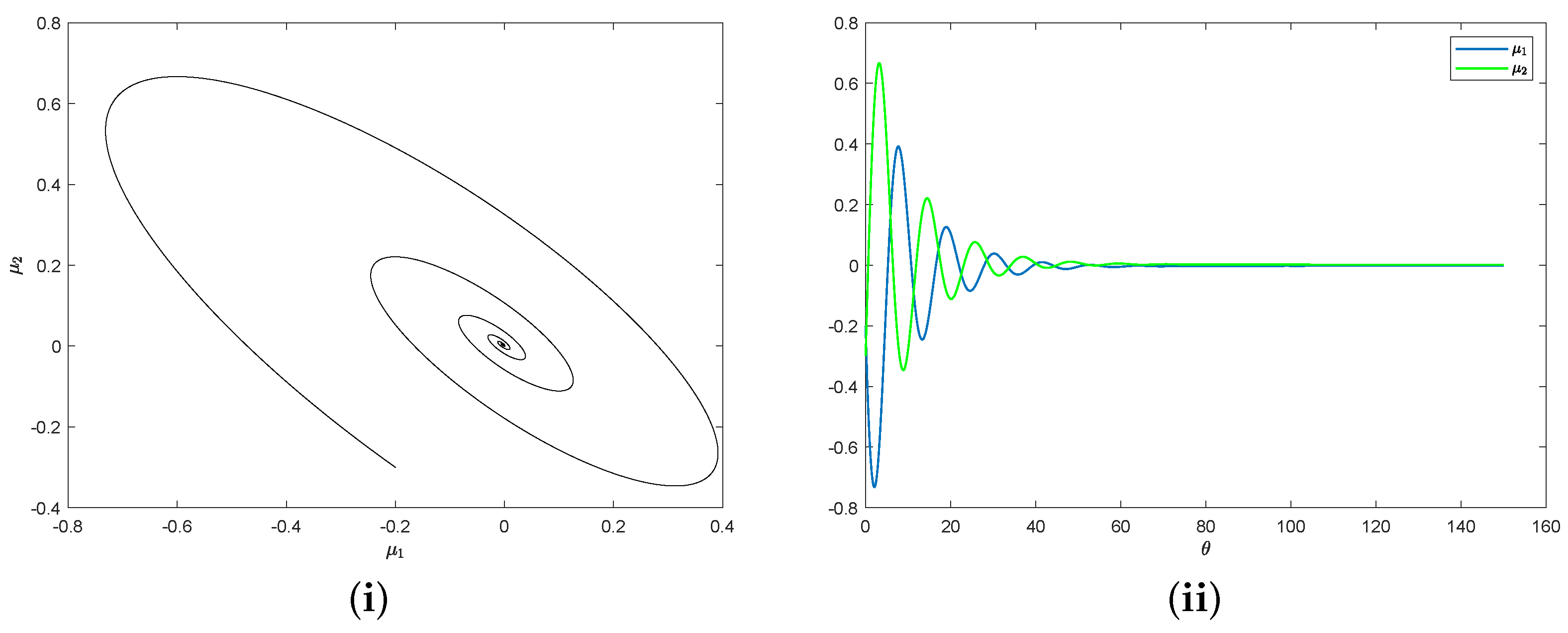
5. Application of a Non-Smooth System
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Tepljakov, A. Fractional-order Modeling and Control of Dynamic Systems; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Yang, X.J.; Gao, F.; Yang, J. General Fractional Derivatives with Applications in Viscoelasticity; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Tarasov, V.E. Mathematical economics: Application of fractional calculus. Mathematics 2020, 8, 660. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V. Fractional Calculus and Fractional Differential Equations; Springer: Singapore, 2019. [Google Scholar]
- Anastassiou, G.A. Advanced ordinary and fractional approximation by positive sublinear operators. Filomat 2021, 35, 1899–1913. [Google Scholar] [CrossRef]
- Khan, Z.A.; Ahmad, I.; Shah, K. Applications of fixed point theory to investigate a system of fractional order differential equations. J. Funct. Space 2021. [Google Scholar] [CrossRef]
- Bagley, R.L.; Calico, R.A. Fractional order state equations for the control of viscoelastic damped structures. J. Guid. Control Dyn. 1991, 14, 304–311. [Google Scholar] [CrossRef]
- Toledo-Hernandez, R.; Rico-Ramirez, V.; Iglesias-Silva, G.A.; Diwekar, U.M. A fractional calculus approach to the dynamic optimization of biological reactive systems. Part I: Fractional models for biological reactions. Chem. Eng. Sci. 2014, 117, 217–228. [Google Scholar] [CrossRef]
- Zhou, Y. Fractional Evolution Equations and Inclusions: Analysis and Control; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Petráš, I. Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Springer: New York, NY, USA, 2011. [Google Scholar]
- Lakshmikantham, V.; Vatsala, A.S. Basic theory of fractional differential equations. Nonlinear-Anal.-Theory Methods Appl. 2008, 69, 2677–2682. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J. Analysis of Fractional Differential Equations. J. Math. Anal. Appl. 2002, 265, 229–248. [Google Scholar] [CrossRef] [Green Version]
- Wang, F. Existence and Uniqueness of Solutions for a Nonlinear Fractional Differential Equation. J. Appl. Math. Comput. 2012, 39, 53–67. [Google Scholar] [CrossRef]
- Gambo, Y.Y.; Ameen, R.; Jarad, F.; Abdeljawad, T. Existence and uniqueness of solutions to fractional differential equations in the frame of generalized Caputo fractional derivatives. Adv. Differ. Equ. 2018, 2018, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer: Berlin, Germany, 2011. [Google Scholar]
- Podlubny, I. Geometric and physical interpretation of fractional integration and fractional differentiation. Fract. Calc. Appl. Anal. 2002, 5, 367–386. [Google Scholar]
- Clarke, F.H.; Ledyaev, Y.S.; Stern, R.J.; Wolenski, P.R. Nonsmooth Analysis and Control Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Bergounioux, M.; Bourdin, L. Pontryagin maximum principle for general Caputo fractional optimal control problems with Bolza cost and terminal constraints. ESAIM-Control OPtim. Calc. Var. 2020, 26, 35. [Google Scholar] [CrossRef]
- Gomoyunov, M.I. Extremal shift to accompanying points in a positional differential game for a fractional-order system. Proc. Steklov Inst. Math. 2020, 308, 83–105. [Google Scholar] [CrossRef]
- Kunze, M. Non-Smooth Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Smirnov, G.V. Introduction to the Theory of Differential Inclusions; American Mathematical Society: Providence, RI, USA, 2022. [Google Scholar]
- Ahmad, B.; Alghanmi, M.; Alsaedi, A. A study of generalized caputo fractional differential equations and inclusions with steiltjes-type fractional integral boundary conditions via fixed-point theory. J. Appl. Anal. Comput 2021, 11, 1208–1221. [Google Scholar] [CrossRef] [PubMed]
- Abbas, M.I.; Ragusa, M.A. Nonlinear fractional differential inclusions with non-singular Mittag-Leffler kernel. AIMS Math. 2022, 7, 20328–20340. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Benchohra, M.; Hamani, S. A survey on existence results for boundary value problems of nonlinear fractional differential equations and inclusions. Acta Appl. Math. 2010, 109, 973–1033. [Google Scholar] [CrossRef]
- Cernea, A. A note on the existence of solutions for some boundary value problems of fractional differential inclusions. Fract. Calc. Appl. Anal. 2012, 15, 183–194. [Google Scholar] [CrossRef]
- Nieto, J.J.; Ouahab, A.; Prakash, P. Extremal solutions and relaxation problems for fractional differential inclusions. Abstr. Appl. Anal. 2013, 2013. [Google Scholar] [CrossRef]
- Kamenskii, M.; Obukhovskii, V.; Petrosyan, G.; Yao, J.C. Existence and approximation of solutions to nonlocal boundary value problems for fractional differential inclusions. Fixed Point Theory Appl. 2019, 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Akdemir, A.O.; Karaoğlan, A.; Ragusa, M.A.; Set, E. Fractional integral inequalities via Atangana-Baleanu operators for convex and concave functions. J. Funct. Space 2021, 2021. [Google Scholar] [CrossRef]
- İlhan, E. Analysis of the spread of Hookworm infection with Caputo-Fabrizio fractional derivative. Turk. J. Sci. 2022, 7, 43–52. [Google Scholar]
- Liu, X.; Jia, B.G.; Erbe, L.; Peterson, A. Lyapunov Functions for fractional order h-difference systems. Filomat 2021, 35, 1155–1178. [Google Scholar] [CrossRef]
- Beddani, M.; Hedia, B. Solution sets for fractional differential inclusions. J. Fract. Calc. Appl. 2019, 10, 273–289. [Google Scholar]
- Cernea, A. On a fractional integro-differential inclusion of Caputo-Katugampola type. Bull. Math. Anal. Appl. 2019, 11, 22–27. [Google Scholar]
- Gomoyunov, M.I. To the theory of differential inclusions with Caputo fractional derivatives. Differ. Equ. 2020, 56, 1387–1401. [Google Scholar] [CrossRef]
- Kamenskii, M.; Obukhovskii, V.; Petrosyan, G.; Yao, J.C. On the Existence of a Unique Solution for a Class of Fractional Differential Inclusions in a Hilbert Space. Mathematics 2021, 9, 136. [Google Scholar] [CrossRef]
- Deimling, K. Multivalued Differential Equations; Walter De Gruyter: Berlin, Germany, 1992. [Google Scholar]
- Hu, S. Handbook of Multi-Valued Analysis, Volume I: Theory; Kluwer: Dordrecht, The Netherlands, 1997. [Google Scholar]
- Aubin, J.P.; Frankowska, H. Set-Valued Analysis; Birkhauser: Boston, MA, USA, 1990. [Google Scholar]
- Dzherbashian, M.M.; Nersesian, A.B. Fractional derivatives and Cauchy problem for differential equations of fractional order. Fract. Calc. Appl. Anal. 2020, 23, 1810–1836. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations. Mathematics in Science and Engineering; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: Yverdon, Switzerland, 1993. [Google Scholar]
- Chang, Y.K.; Li, W.T. Existence results for second order impulsive functional differential inclusions. J. Math. Anal. Appl. 2005, 301, 477–490. [Google Scholar] [CrossRef] [Green Version]
- Covitz, H.; Nadler, S.B. Multi-Valued Contraction Mappings in Generalized Metric Spaces. Isr. J. Math. 1970, 8, 5–11. [Google Scholar] [CrossRef]
- Granas, A.; Dugundji, J. Fixed Point Theory; Springer: New York, NY, USA, 2003. [Google Scholar]
- Yosida, K. Functional Analysis, 6th ed.; Springer: Berlin, Germany, 1980. [Google Scholar]
- Ye, H.; Gao, J.; Ding, Y. A generalized Gronwall inequality and its application to a fractional differential equation. J. Math. Anal. Appl. 2007, 328, 1075–1081. [Google Scholar] [CrossRef] [Green Version]
- Castaing, C.; Valadier, M. Convex Analysis and Measurable Multifunctions; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Fu, S.; Liu, Y. Complex Dynamical Behavior of Modified MLC Circuit. Chaos Solitons Fractals 2020, 141, 110–407. [Google Scholar] [CrossRef]
- Srinivasan, K.; Chandrasekar, V.K.; Venkatesan, A.; Mohamed, I.R. Duffing–van der Pol oscillator type dynamics in Murali–Lakshmanan–Chua (MLC) circuit. Chaos Solitons Fractals 2016, 82, 60–71. [Google Scholar] [CrossRef]
- Li, C.; Peng, G. Chaos in Chen’s systems with a fractional order. Chaos Solitons Fractals 2004, 22, 443–450. [Google Scholar] [CrossRef]
- Zhou, P.; Huang, K. A new 4-D nonequilibrium fractional-order chaotic system and its circuit implementation. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2005–2011. [Google Scholar] [CrossRef]
- Ahmed, E.; El-Sayed, A.M.A.; El-Saka, H.A. On some Routh–Hurwitz conditions for fractional order differential equations and their applications in Lorenz, Rössler, Chua and Chen systems. Phys. Lett. A 2006, 358, 1–4. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Zhao, Z.; Shao, Y. On Cauchy Problems of Caputo Fractional Differential Inclusion with an Application to Fractional Non-Smooth Systems. Mathematics 2023, 11, 653. https://doi.org/10.3390/math11030653
Yu J, Zhao Z, Shao Y. On Cauchy Problems of Caputo Fractional Differential Inclusion with an Application to Fractional Non-Smooth Systems. Mathematics. 2023; 11(3):653. https://doi.org/10.3390/math11030653
Chicago/Turabian StyleYu, Jimin, Zeming Zhao, and Yabin Shao. 2023. "On Cauchy Problems of Caputo Fractional Differential Inclusion with an Application to Fractional Non-Smooth Systems" Mathematics 11, no. 3: 653. https://doi.org/10.3390/math11030653