


Observer-Based Adaptive Fuzzy Quantized Control for Fractional-Order Nonlinear Time-Delay Systems with Unknown Control Gains



Abstract
1. Introduction
- (1)
- In most of previously reported results with respect to adaptive control for FONSs [8,9,16,17,18], the system states must be available a priori, which may not be easily satisfied in practice. In contrast to the aforementioned results, only the system output—rather than all state information—is required for the controller designed in this work by constructing a high-gain fuzzy state observer. Time-varying delays and input quantization are simultaneously considered in the investigated system. Therefore, the system model considered in this paper is more general than previous proposals.
- (2)
- In [8,9,16,17,18], prior knowledge of control gains of the investigated systems was assumed, which also implies that previously proposed methods in [8,9,16,17,18] may be not valid when exact information about control gains is not accessible in advance. In contrast to the methods proposed in [8,9,16,17,18], in our work, the dependence of controller design and stability analysis on control gains were fully removed by incorporating an indirect Lyapunov method and Nussbaum gain technique, making the obtained results more relaxed in comparison to the abovementioned results.
2. Preliminaries and System Description
2.1. Fractional Calculus
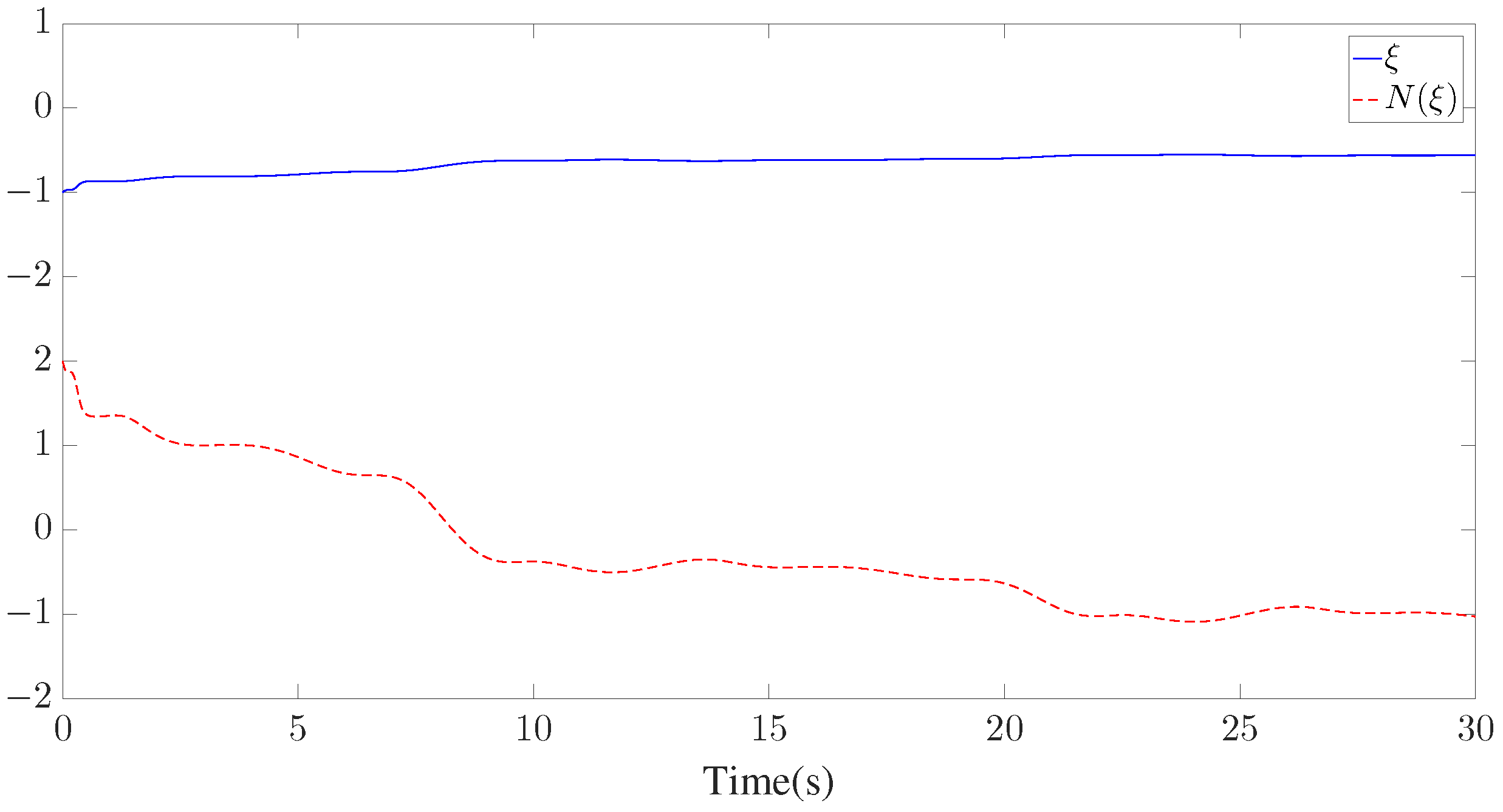
2.2. Nussbaum-Type Function
2.3. Fuzzy Logic Systems
- where represents the sth rule, , and denotes the linguistic variables associated with the inputs and outputs of the FLSs. and are the fuzzy set. Then, the FLSs are described as
2.4. Nonlinear System Model
2.5. Model Transformation
3. Main Results
3.1. High-Gain Fuzzy State Observer Design
3.2. FODSC-Based Adaptive Fuzzy Quantized Control Design
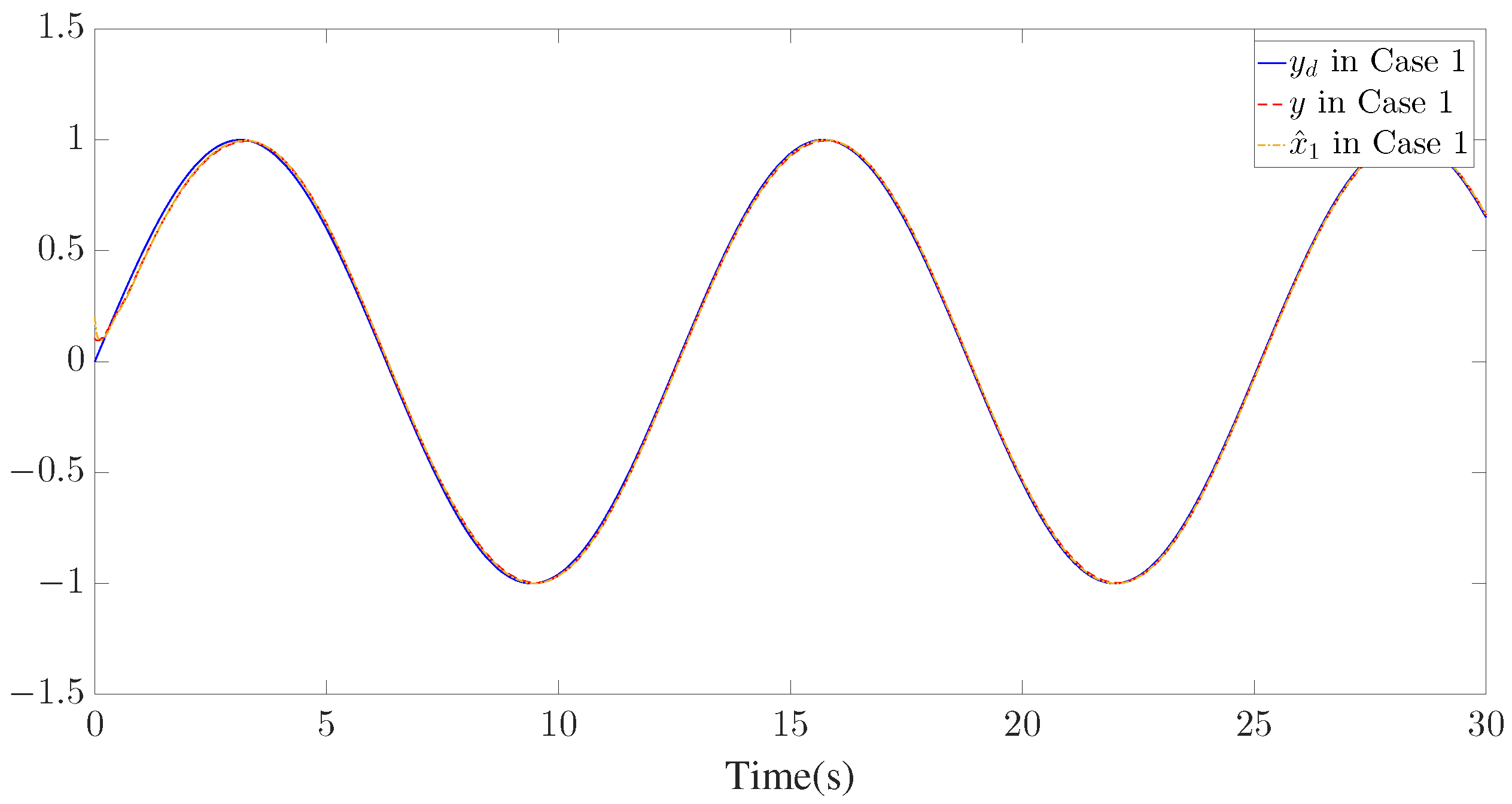
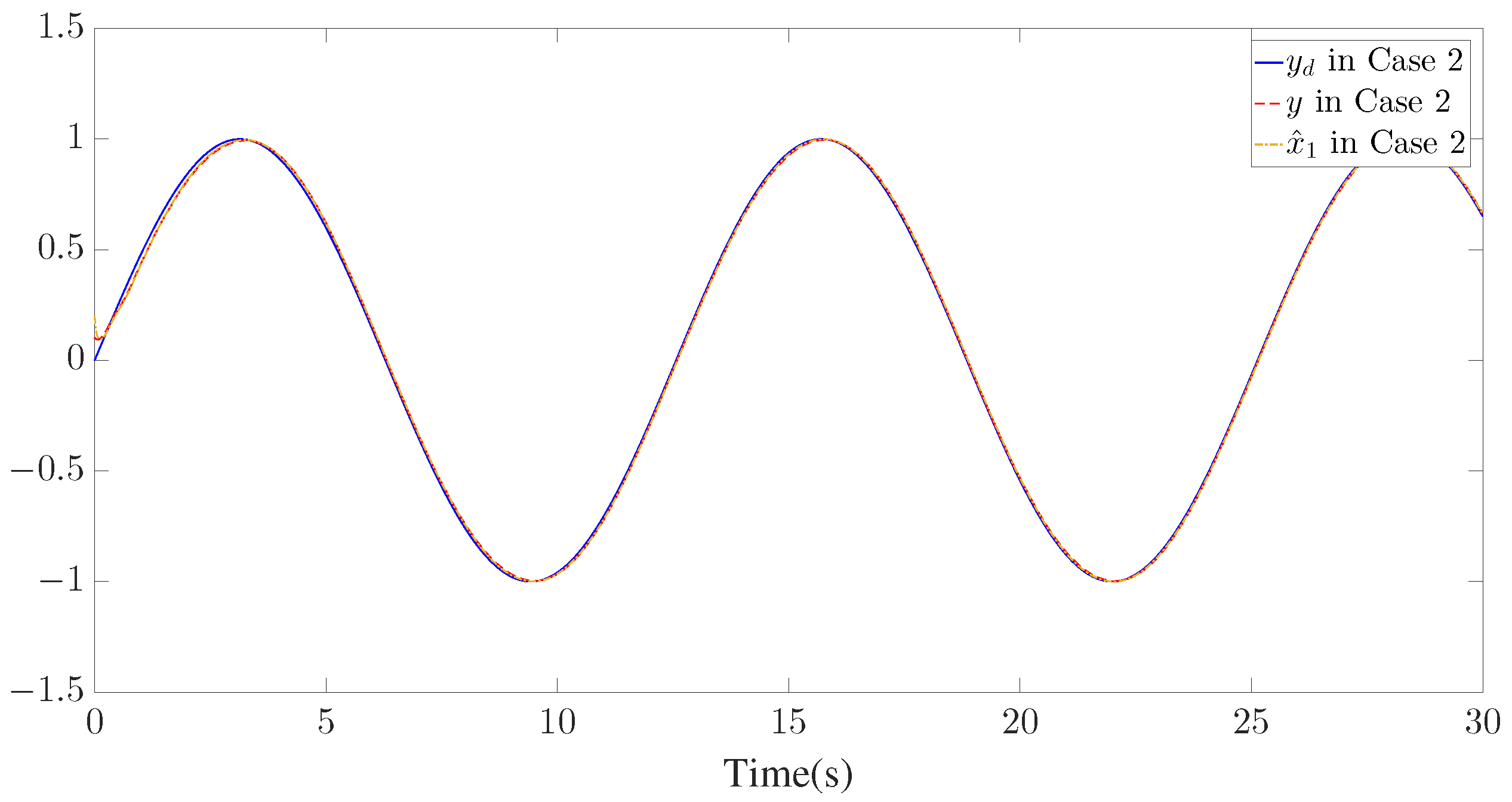
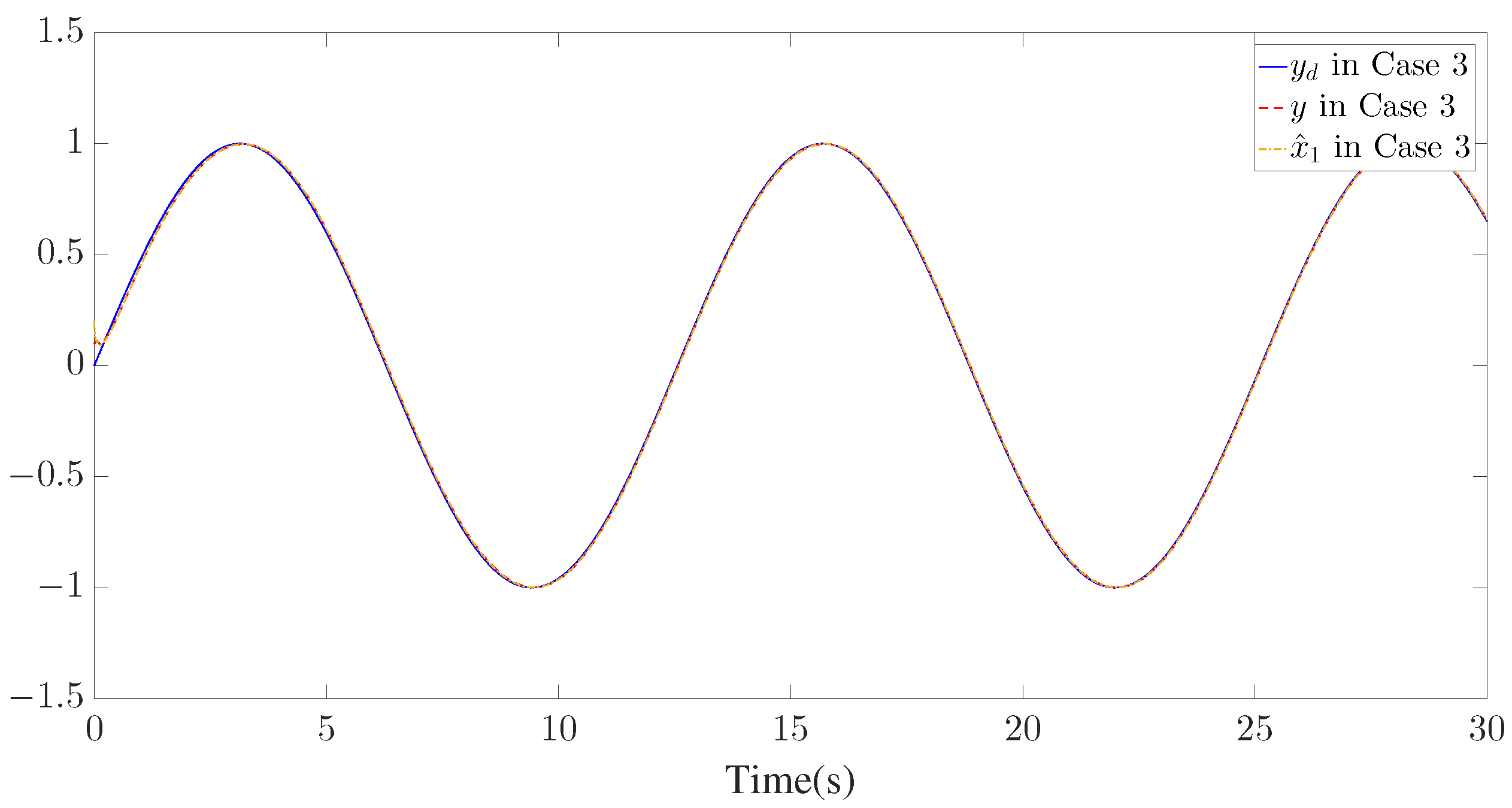
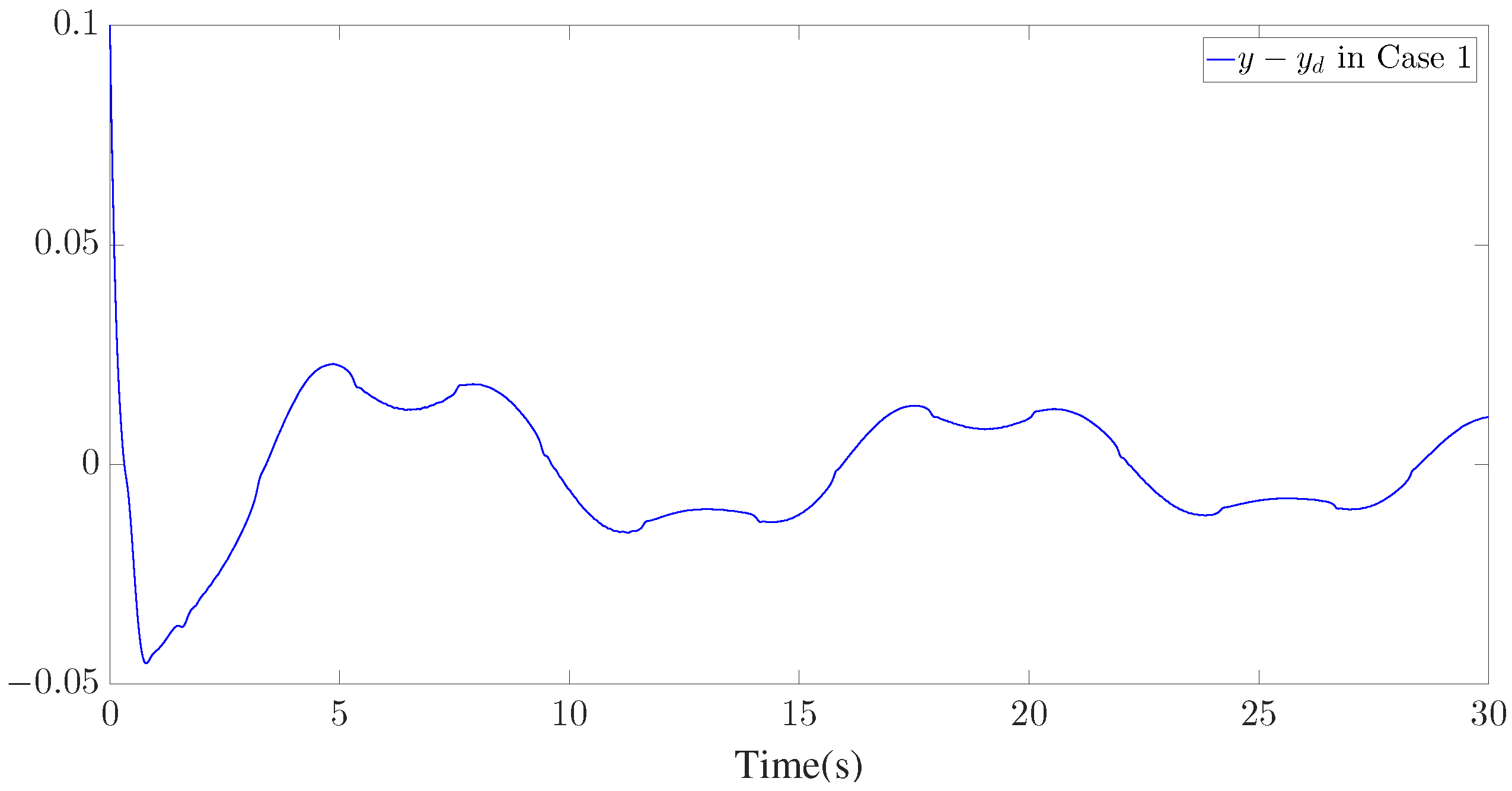
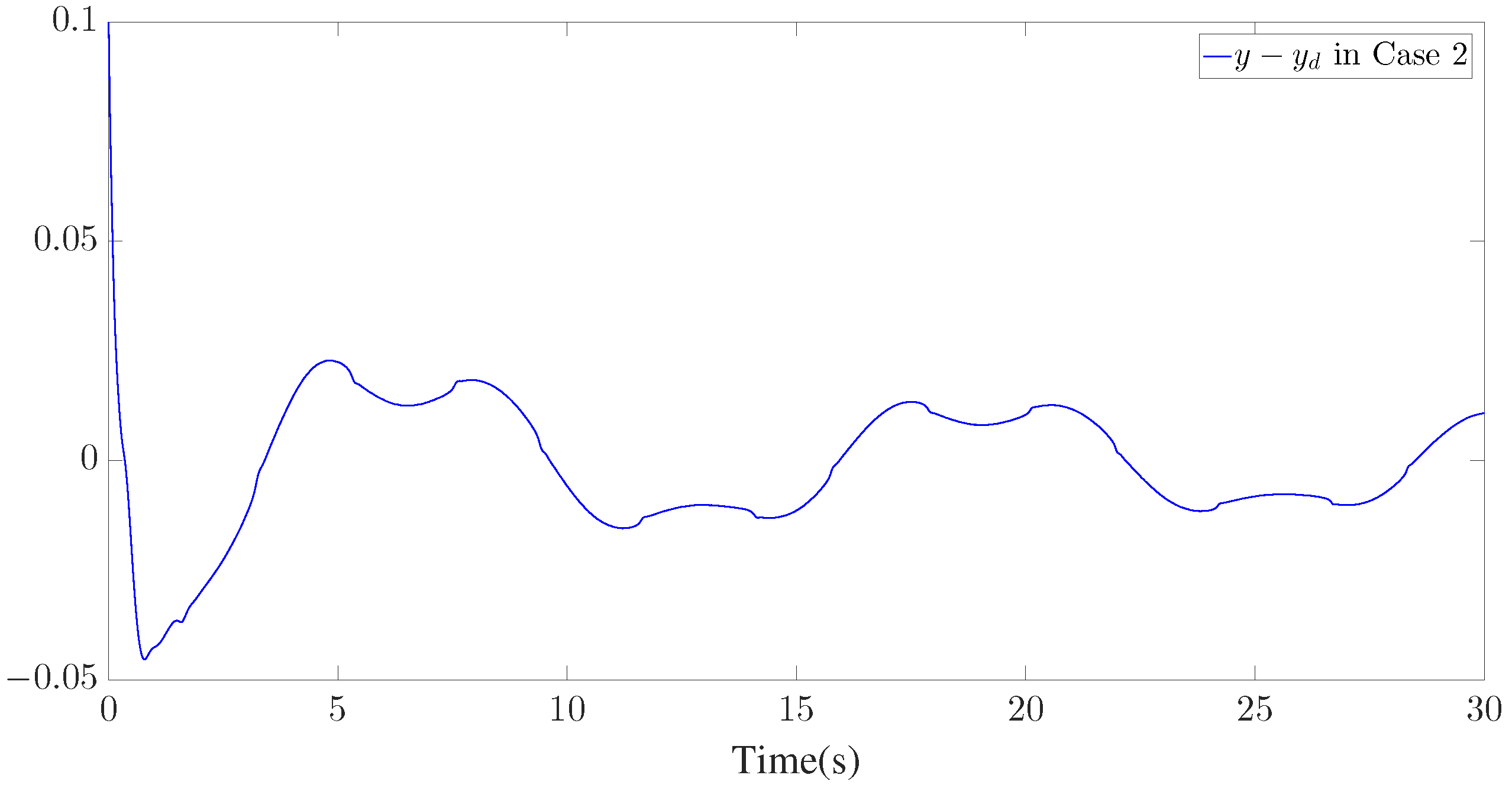
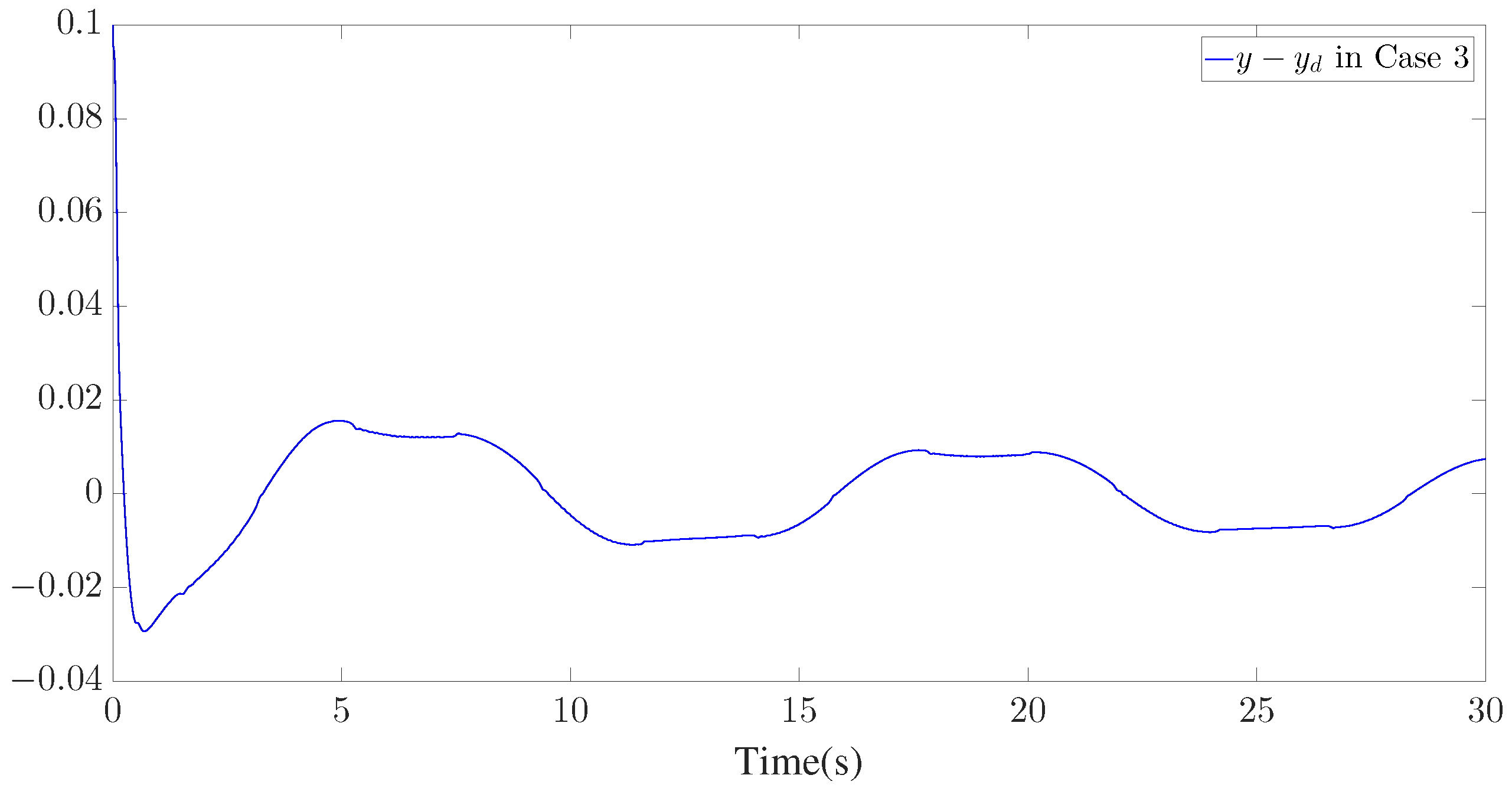
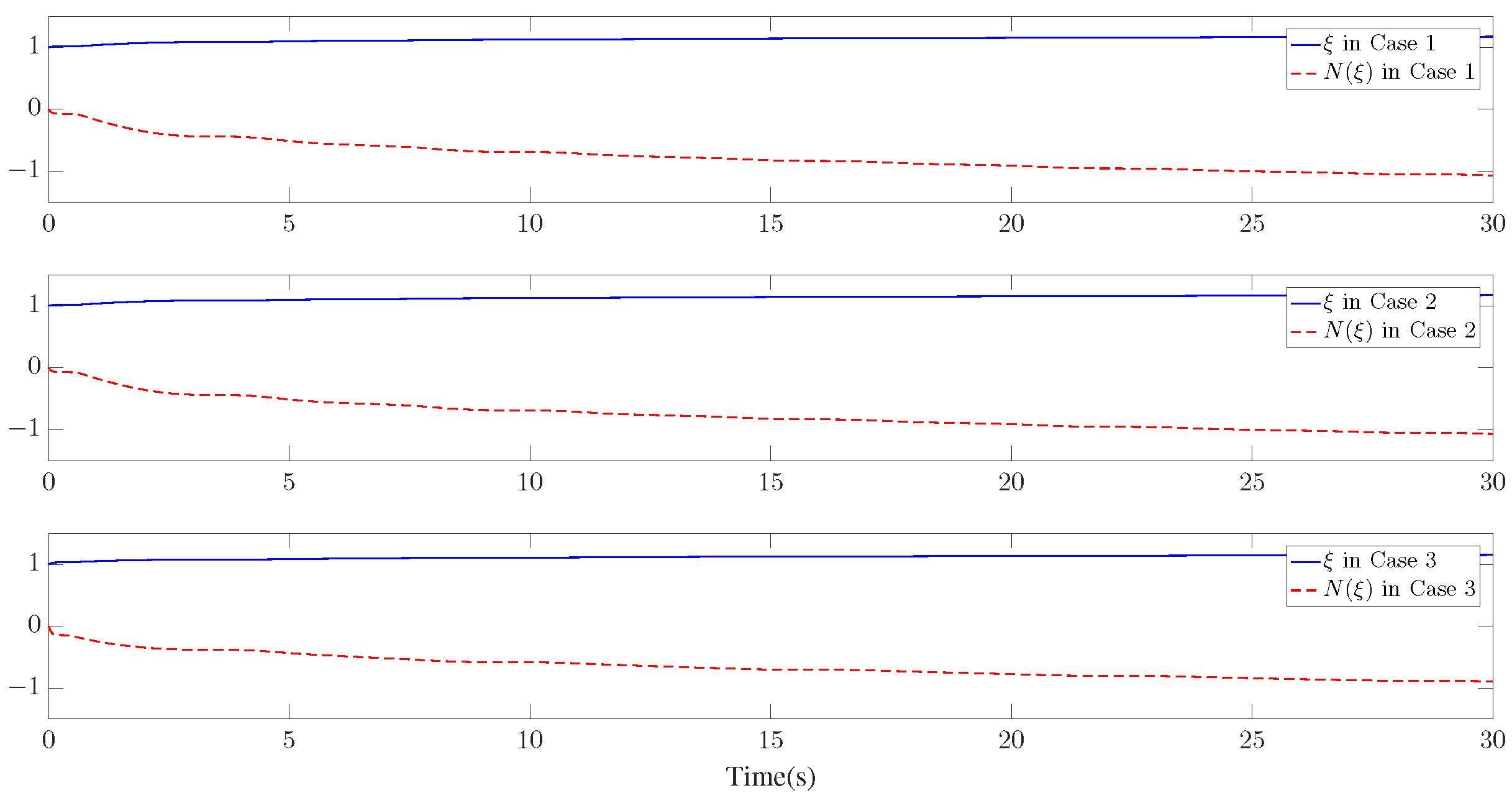
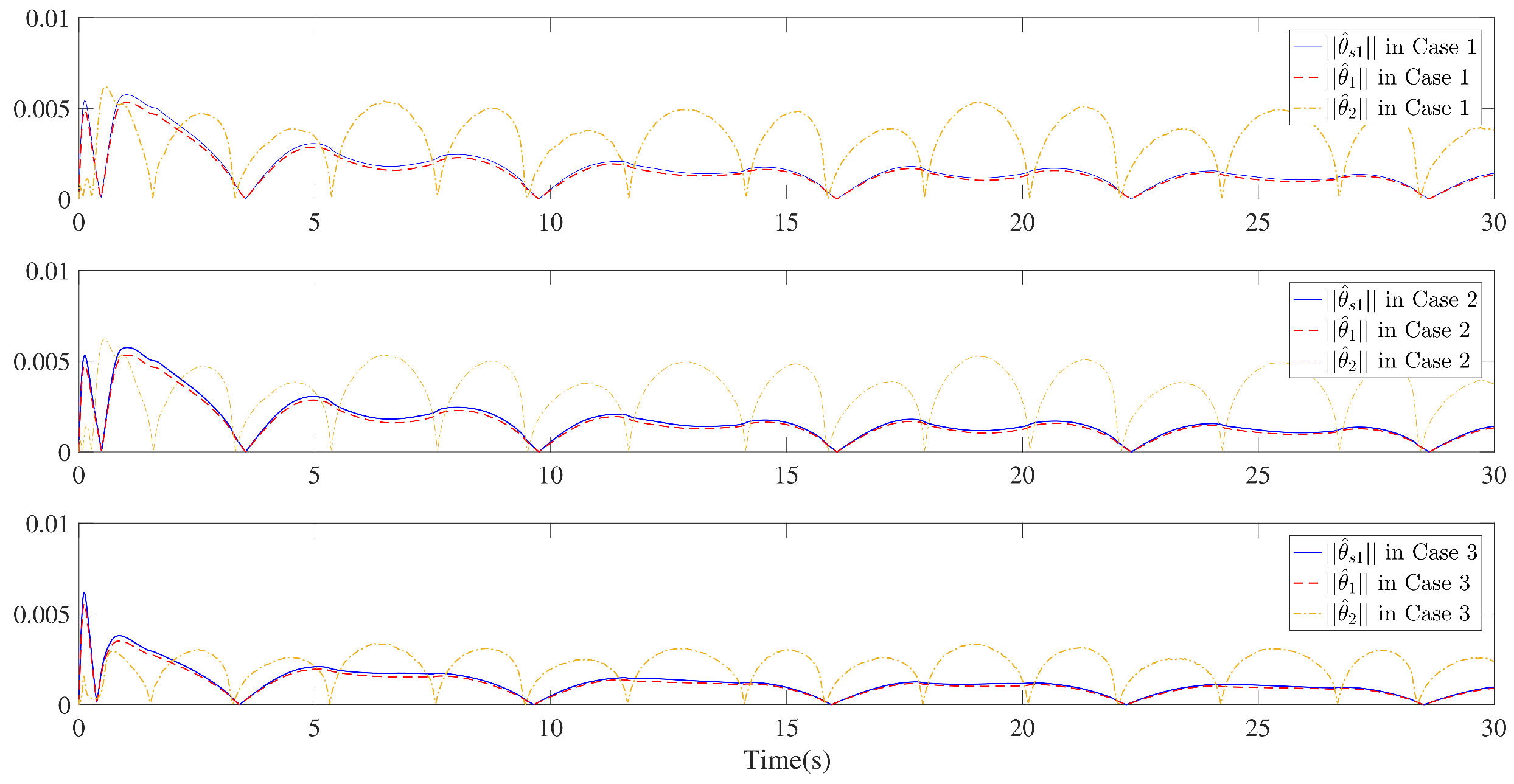
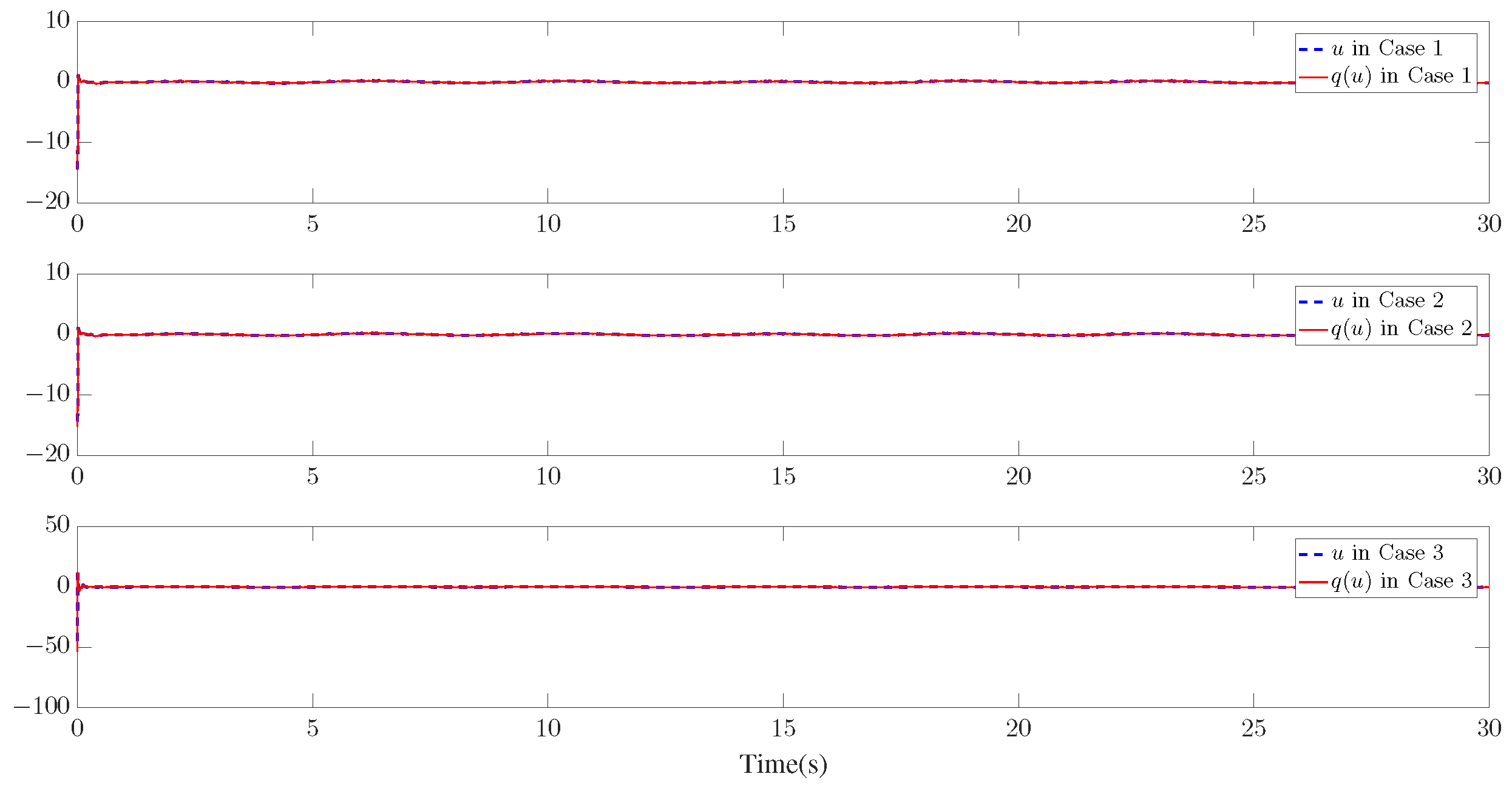
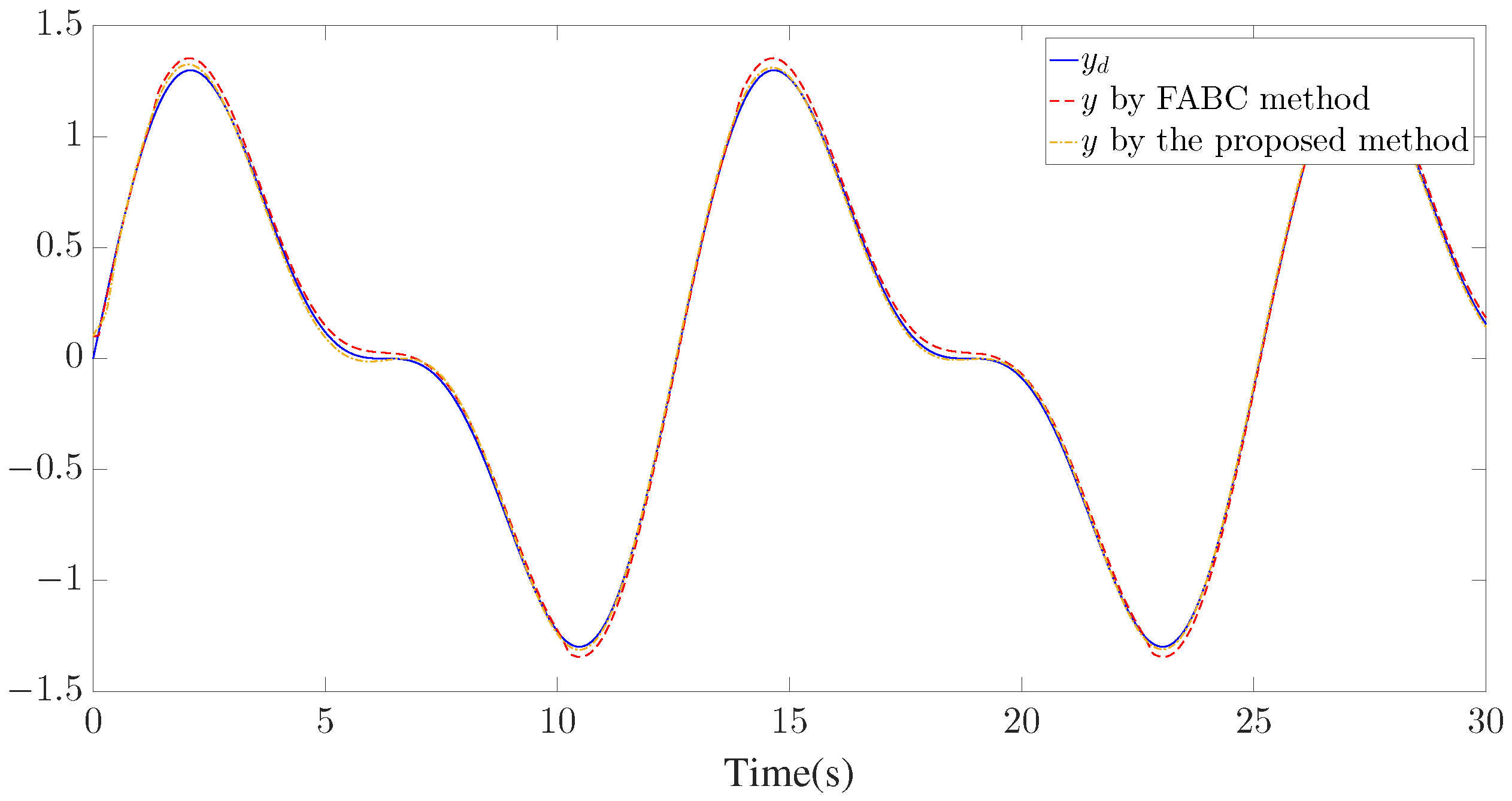
4. Simulation Verification
4.1. Numerical Example
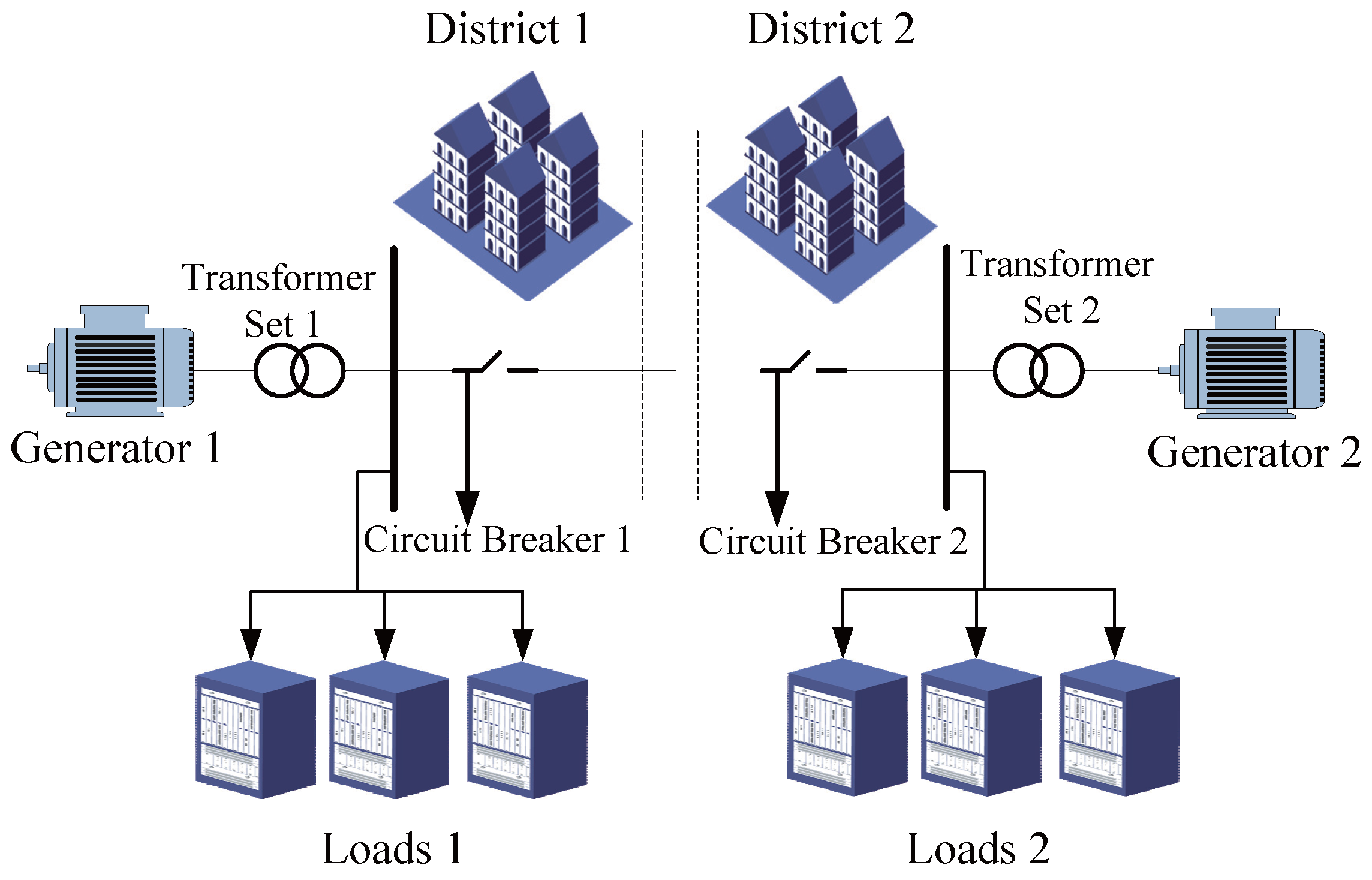
4.2. Application Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Rao, R.; Zhong, S.; Yang, X.; Li, H.; Zhang, Y. Impulsive control and synchronization for fractional-order hyper-chaotic financial system. Mathematics 2022, 10, 2737. [Google Scholar] [CrossRef]
- Liu, C.; Liu, D.; Boutat, B.; Wang, Y.; Wu, Z. Non-asymptotic and robust estimation for a class of nonlinear fractional-order systems. Commun. Nonlinear Sci. Numer. Simul. 2022, 115, 106752. [Google Scholar] [CrossRef]
- Chen, M.; Shao, S.; Shi, P.; Shi, Y. Disturbance-observer-based robust synchronization control for a class of fractional-order chaotic systems. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 417–421. [Google Scholar] [CrossRef]
- Mirzajani, S.; Aghababa, M.; Heydari, A. Adaptive T-S fuzzy control design for fractional-order systems with parametric uncertainty and input constraint. Fuzzy Sets Syst. 2019, 365, 22–39. [Google Scholar] [CrossRef]
- Liu, H.; Wang, H.; Cao, J.; Alsaedi, A.; Hayat, T. Composite learning adaptive sliding mode control of fractional-order nonlinear systems with actuator faults. J. Frankl. Inst. 2020, 356, 9580–9599. [Google Scholar]
- Song, S.; Zhang, B.; Xia, J.; Zhang, Z. Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1559–1569. [Google Scholar] [CrossRef]
- Wei, Y.; Tse, P.D.; Yao, Z.; Wang, Y. Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dyn. 2016, 86, 1047–1056. [Google Scholar]
- Liu, H.; Pan, Y.; Li, S.; Chen, Y. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q.; Tong, S. Fuzzy Adaptive Fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1372–1379. [Google Scholar] [CrossRef]
- Wang, D.; Huang, J. Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw. 2005, 16, 195–202. [Google Scholar] [CrossRef]
- Niu, B.; Zhang, Z.; Li, Z.; Hayat, T.; Alsaadi, F.E. Adaptive neural-network-based dynamic surface control for stochastic interconnected nonlinear nonstrict-feedback systems with dead zone. IEEE Trans. Neural Netw. Learn. Syst. 2019, 49, 1386–1398. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C.; Dong, W. Fuzzy finite-time command filtered control of nonlinear systems with input saturation. IEEE Trans. Cybern. 2018, 48, 2378–2387. [Google Scholar] [PubMed]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C. Barrier Lyapunov functions-based command filtered output feedback control for full-state constrained nonlinear systems. Automatica 2019, 105, 71–79. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, K.; Rudas, I.; Gao, H. Command filter-based adaptive NN control for MIMO nonlinear systems with full-state constraints and actuator hysteresis. IEEE Trans. Cybern. 2020, 50, 2905–2915. [Google Scholar] [PubMed]
- Li, Y. Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica 2019, 106, 117–123. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 28, 122–133. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J. Composite learning adaptive dynamic surface control of fractional-order nonlinear systems. IEEE Trans. Cybern. 2020, 50, 2557–2567. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Song, X.; Zhang, Z. Neuro-fuzzy-based adaptive dynamic surface control for fractional-order nonlinear strict-feedback systems with input constraint. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3575–3586. [Google Scholar] [CrossRef]
- Nussbaum, R.D. Some remarks on a conjecture in parameter adaptive control. Syst. Control Lett. 1983, 3, 243–246. [Google Scholar] [CrossRef]
- Ma, H.; Liang, H.; Zhou, Q.; Ahn, C.K. Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 506–513. [Google Scholar]
- Liu, W.; Ma, Q.; Lu, J.; Xu, S.; Zhang, Z. A neural composite dynamic surface control for pure-feedback systems with unknown control gain signs and full state constraints. Int. J. Robust Nonlinear Control 2019, 29, 5720–5743. [Google Scholar] [CrossRef]
- Wang, H.; Karimi, H.R.; Liu, P.X.; Yang, H. Adaptive neural control of nonlinear systems with unknown control directions and input dead-zone. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1897–1907. [Google Scholar]
- Deng, X.; Yuan, Y.; Wei, L.; Xu, B.; Tao, L. Adaptive neural tracking control for nonstrict-feedback nonlinear systems with unknown control gains via dynamic surface control method. Mathematics 2022, 10, 2419. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X.; Zhang, Z. Adaptive command filtered neuro-fuzzy control design for fractional-order nonlinear systems with unknown control directions and input quantization. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7238–7249. [Google Scholar]
- Liu, Z.; Wang, F.; Zhang, Y.; Chen, C.L.P. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Trans. Cybern. 2016, 46, 524–534. [Google Scholar] [CrossRef]
- Deng, X.; Huang, Y.; Wei, L.; Yang, H. Adaptive fuzzy command filtered finite-time tracking control for uncertain nonlinear multi-agent systems with unknown input saturation and unknown control directions. Mathematics 2022, 10, 4656. [Google Scholar] [CrossRef]
- Li, Y.; Yang, G. Observer-based adaptive fuzzy quantized control of uncertain nonlinear systems with unknown control directions. Fuzzy Sets Syst. 2019, 371, 61–77. [Google Scholar] [CrossRef]
- Hua, C.; Ning, J.; Zhao, G.; Li, Y. Output feedback NN tracking control for fractional-order nonlinear systems with time-delay and input quantization. Neurocomputing 2018, 290, 229–237. [Google Scholar] [CrossRef]
- Choi, Y.H.; Yoo, S.J. Quantized-feedback-based adaptive event-triggered control of a class of uncertain nonlinear systems. Mathematics 2020, 8, 1603. [Google Scholar]
- Li, Y.; Tong, S.; Li, T. Hybrid fuzzy adaptive output feedback control design for uncertain MIMO nonlinear systems with time-varying delays and input saturation. IEEE Trans. Fuzzy Syst. 2016, 24, 841–853. [Google Scholar]
- Zhou, Q.; Wu, C.; Shi, P. Observer-based adaptive fuzzy tracking control of nonlinear systems with time delay and input saturation. Fuzzy Sets Syst. 2017, 316, 49–68. [Google Scholar]
- Ma, J.; Xu, S.; Ma, Q.; Zhang, Z. Event-triggered adaptive neural network control for nonstrict-feedback nonlinear time-delay systems with unknown control directions. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4196–4205. [Google Scholar] [CrossRef]
- Wang, H.; Liu, S.; Yang, X. Adaptive neural control for non-strict-feedback nonlinear systems with input delay. Inform. Sci. 2020, 514, 605–616. [Google Scholar]
- Yang, J.; Wang, Y.; Wang, T.; Yang, X. Fuzzy-based tracking control for a class of fractional-order systems with time delays. Mathematics 2022, 10, 1884. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X. Adaptive hybrid fuzzy output feedback control for fractional-order nonlinear systems with time-varying delays and input saturation. Appl. Math. Comput. 2020, 364, 124662. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differential equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Ge, S.S.; Fan, H.; Lee, T.H. Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 499–516. [Google Scholar]
- Li, Y.; Tong, S.; Li, Y. Fuzzy adaptive fault tolerant time-varying formation control for nonholonomic multirobot systems with range constraints. IEEE Trans. Intell. Veh. 2023, 8, 3668–3679. [Google Scholar] [CrossRef]
- Sui, S.; Tong, S. Finite-time fuzzy adaptive PPC for nonstrict-feedback nonlinear MIMO systems. IEEE Trans. Cybern. 2013, 9, 4875–4888. [Google Scholar] [CrossRef]
- Askari, M.R.; Shahrokhi, M.; Talkhoncheh, M.K. Observer-based adaptive fuzzy controller for nonlinear systems with unknown control directions and input saturation. Fuzzy Sets Syst. 2017, 314, 24–45. [Google Scholar] [CrossRef]
- Song, S.; Song, X.; Tejado, I. Disturbance observer-based event-triggered adaptive command filtered backstepping control for fractional-order nonlinear systems and its application. Fractal Fract. 2023, 7, 810. [Google Scholar]
- Zuo, Z.; Wang, C. Adaptive trajectory tracking control of output constrained multi-rotors systems. IET Control Theory Appl. 2013, 9, 4875–4888. [Google Scholar] [CrossRef]
- Chen, H.K.; Lin, T.N.; Chen, J.H. Dynamic analysis, controlling chaos and chaotification of a SMIB power system. Chaos Solut. Fract. 2005, 24, 1307–1315. [Google Scholar] [CrossRef]
- Liang, Z.; Gao, J. Chaos in a fractional-order single-machine infinite-bus power system and its adaptive backstepping control. Int. J. Mod. Nonlinear Theory Appl. 2016, 5, 122–131. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Index | Item | Case 1 | Case 2 | Case 3 |
|---|---|---|---|---|
| IAE | 0.4701 | 0.4704 | 0.3675 | |
| ITAE | 4.241 | 4.244 | 3.096 | |
| ISE | 0.017 | 0.017 | 0.0138 |
| Design Parameters | Disturbance Terms |
|---|---|
| , , . | , |
| Initial Conditions | |
| Reference Signal | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Song, S.; Song, X.; Tejado, I. Observer-Based Adaptive Fuzzy Quantized Control for Fractional-Order Nonlinear Time-Delay Systems with Unknown Control Gains. Mathematics 2024, 12, 314. https://doi.org/10.3390/math12020314
Dong Y, Song S, Song X, Tejado I. Observer-Based Adaptive Fuzzy Quantized Control for Fractional-Order Nonlinear Time-Delay Systems with Unknown Control Gains. Mathematics. 2024; 12(2):314. https://doi.org/10.3390/math12020314
Chicago/Turabian StyleDong, Yuwen, Shuai Song, Xiaona Song, and Inés Tejado. 2024. "Observer-Based Adaptive Fuzzy Quantized Control for Fractional-Order Nonlinear Time-Delay Systems with Unknown Control Gains" Mathematics 12, no. 2: 314. https://doi.org/10.3390/math12020314
APA StyleDong, Y., Song, S., Song, X., & Tejado, I. (2024). Observer-Based Adaptive Fuzzy Quantized Control for Fractional-Order Nonlinear Time-Delay Systems with Unknown Control Gains. Mathematics, 12(2), 314. https://doi.org/10.3390/math12020314