
A Higher-Order Extended Cubature Kalman Filter Method Using the Statistical Characteristics of the Rounding Error of the System Model


Abstract
1. Introduction
2. Problem Statement
- Time Update
- Measurement Updates
3. Cubature Kalman Filtering Method Considering Rounding Error Information (RHCKF)
- Time Update
3.1. Cubature Kalman Filter Considering First-Order Rounding Error
3.2. Cubature Kalman Filter Considering Second-Order Rounding Error
3.3. Cubature Kalman Filter Considering Rounding of the General Order l − 1
- Measurement Updates
4. Performance Analysis of RHCKF and CKF
4.1. Performance Analysis in the Prediction Phase
4.2. Performance Analysis of the Update Phase
5. Numerical Simulation Verification
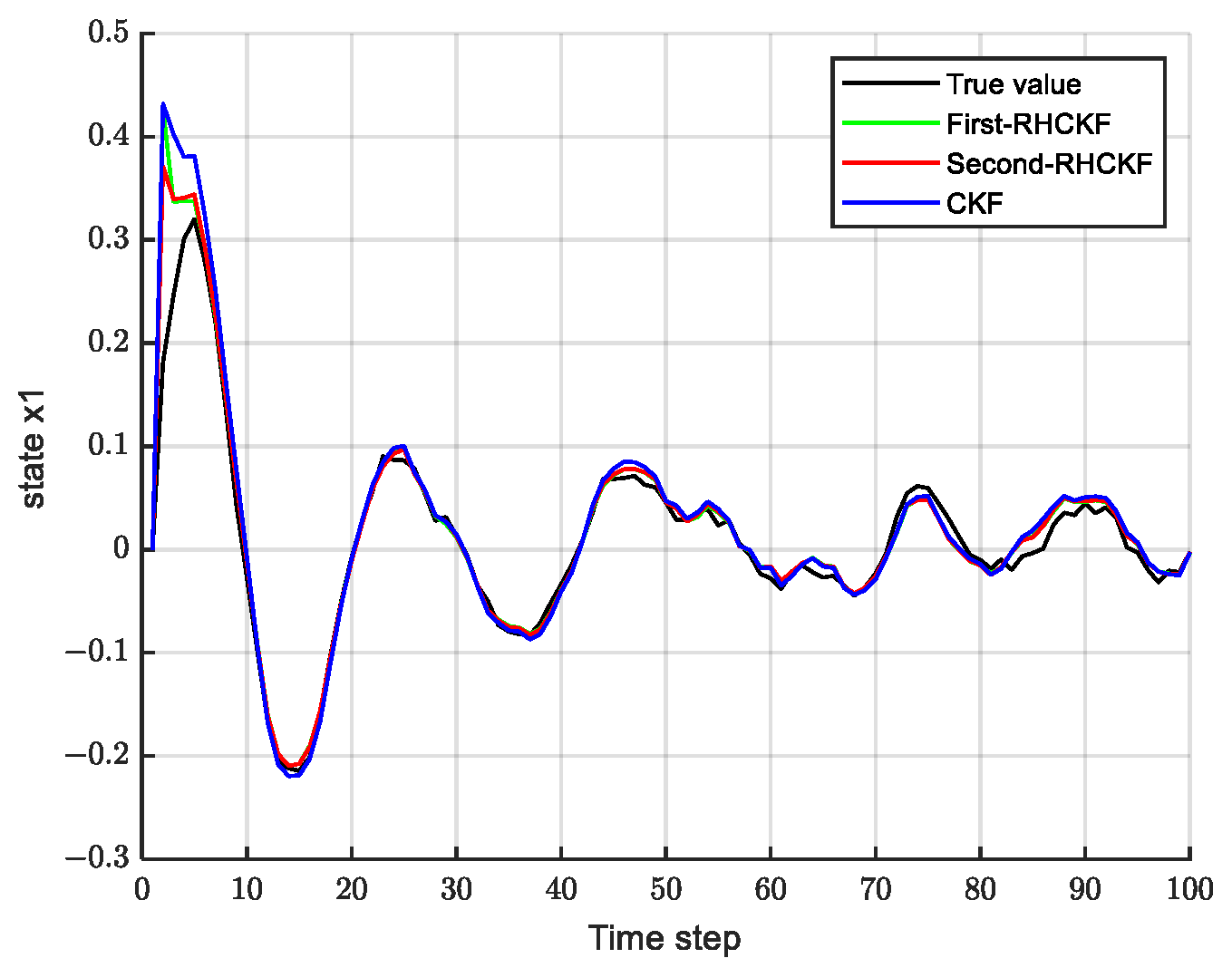
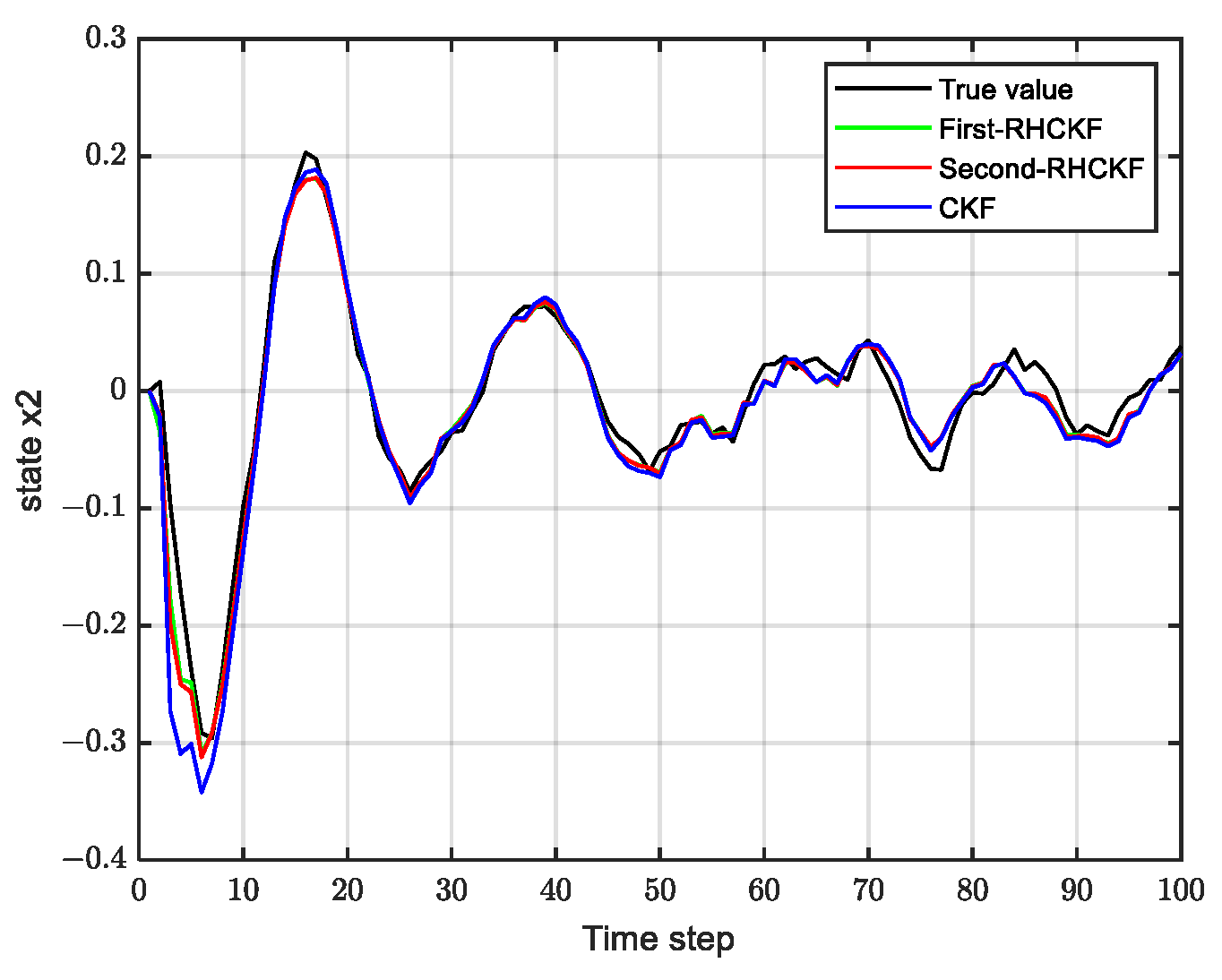
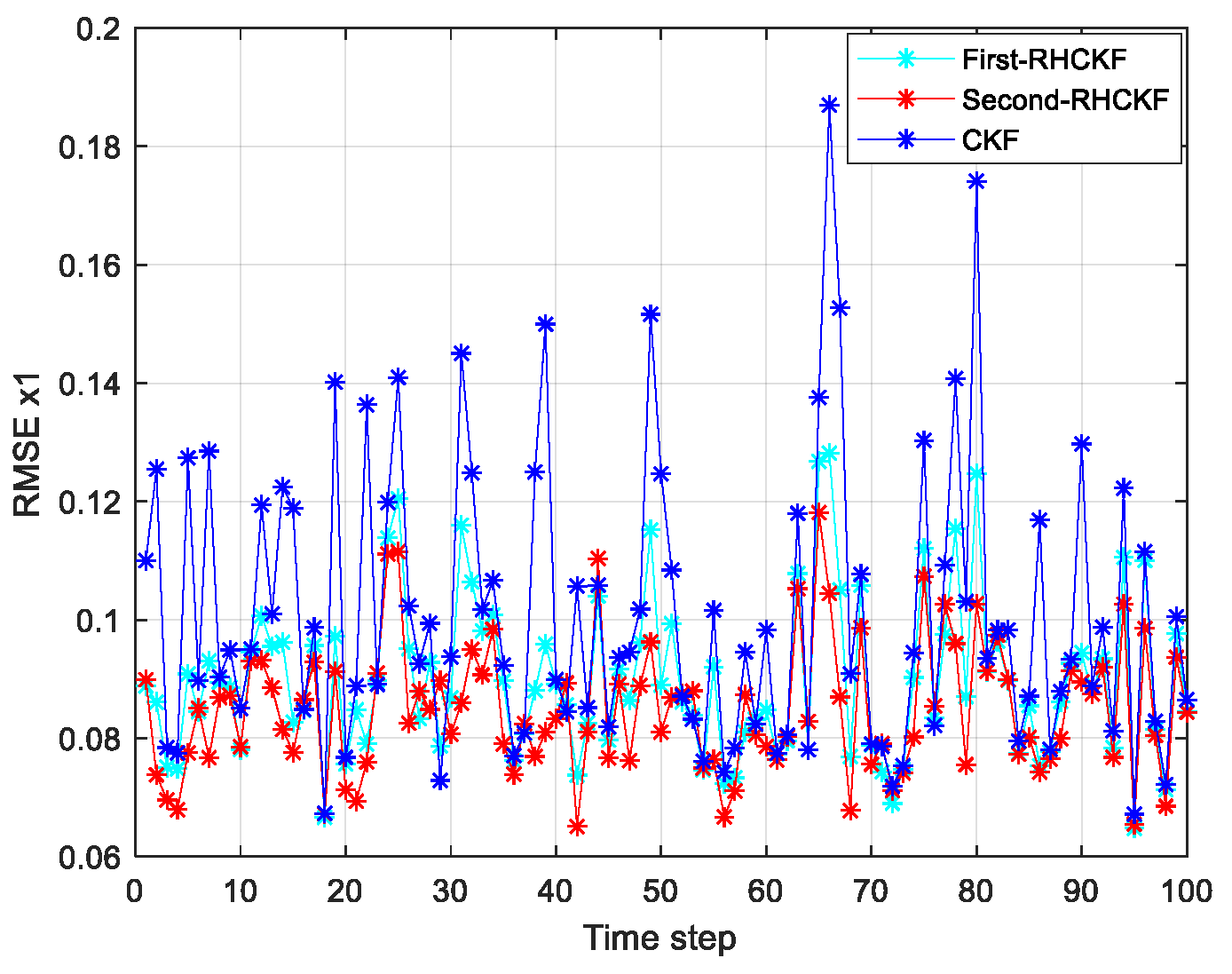
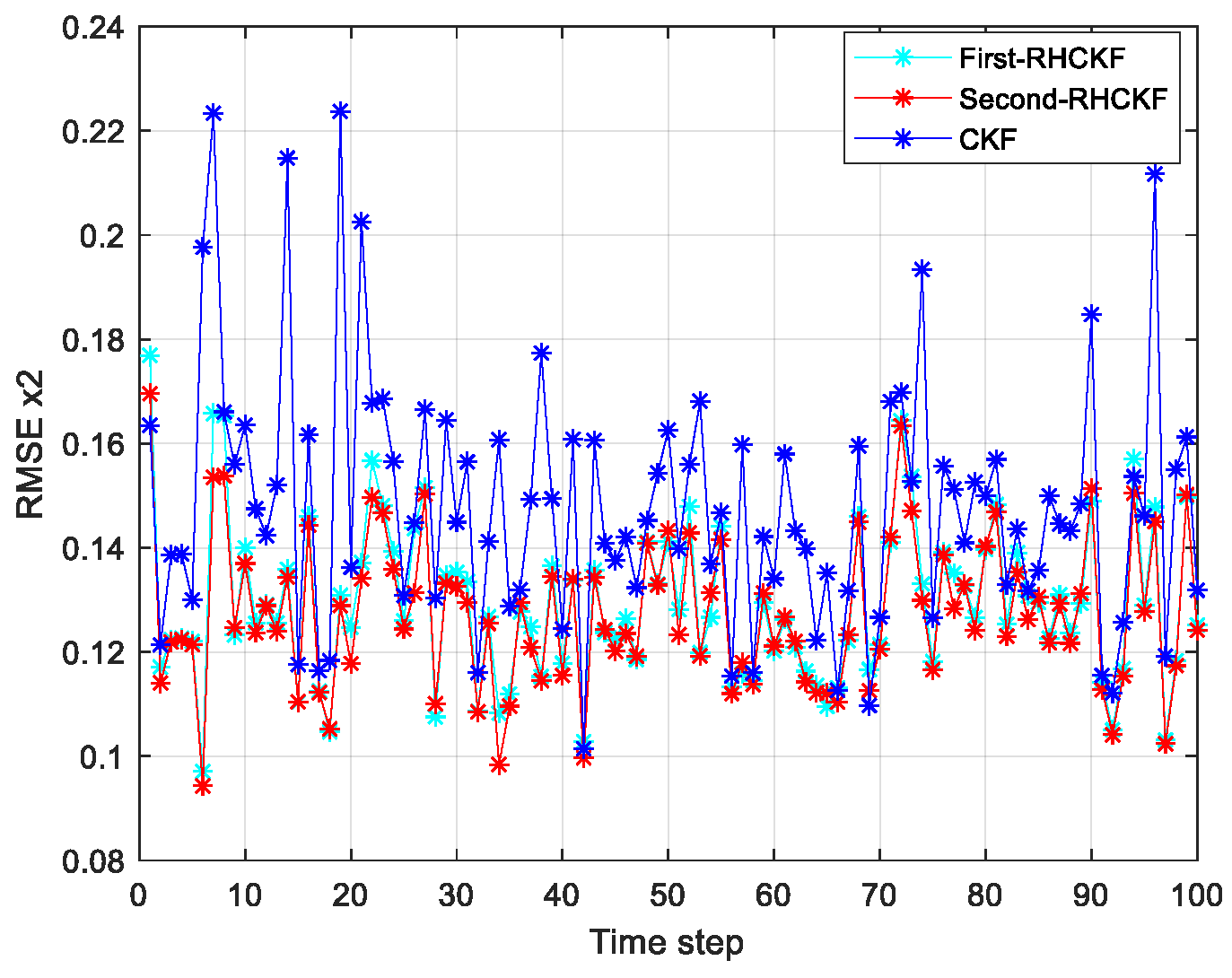
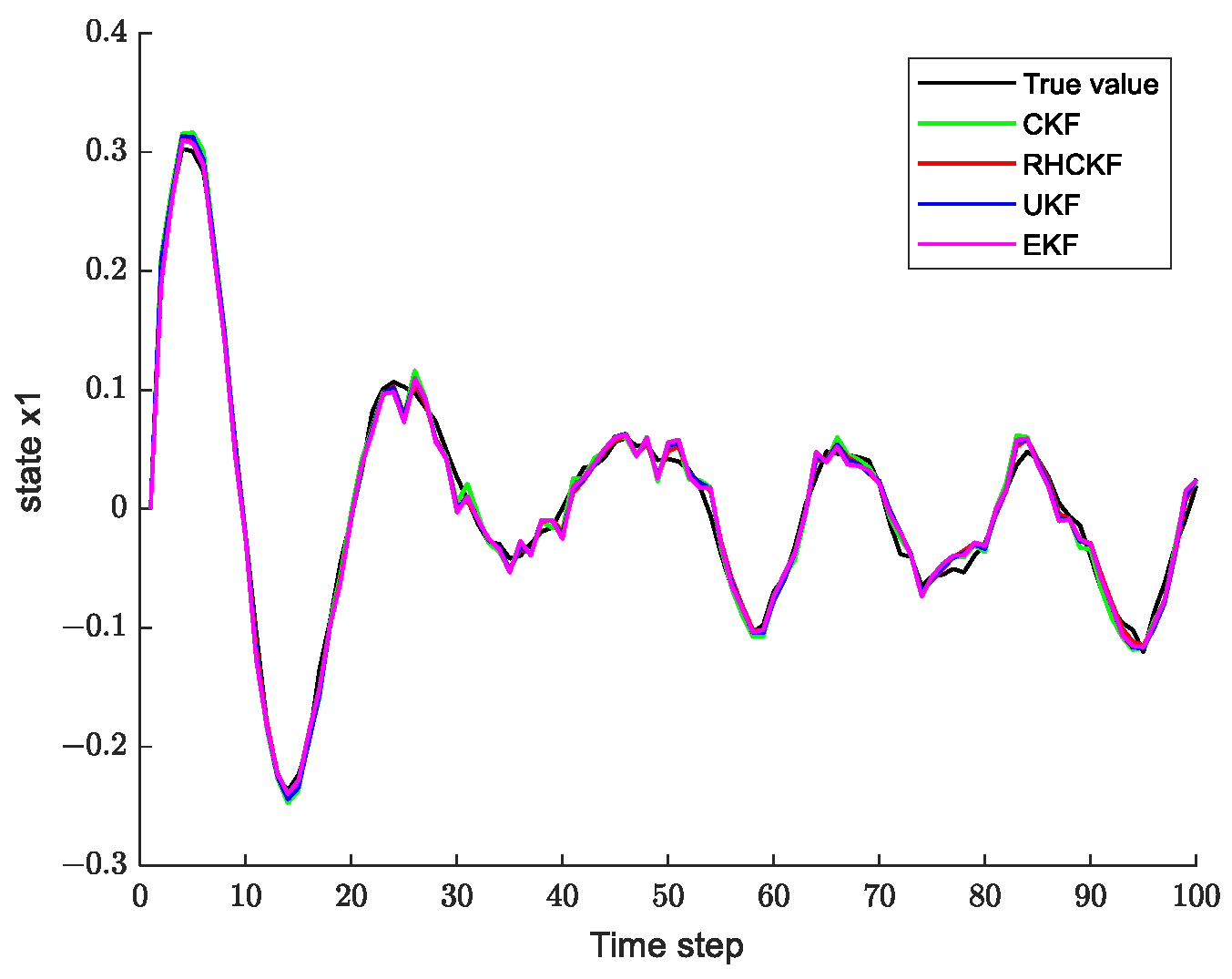
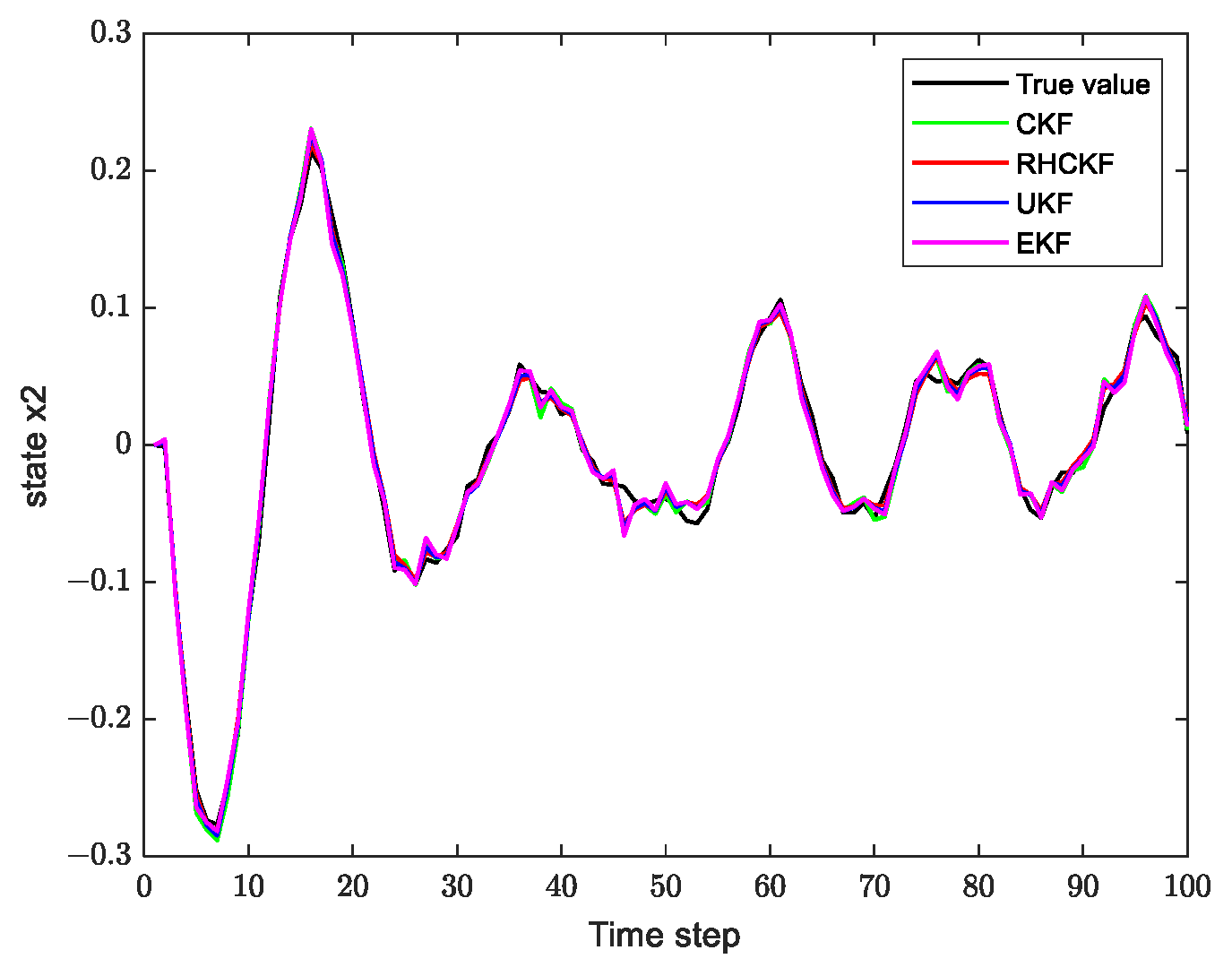
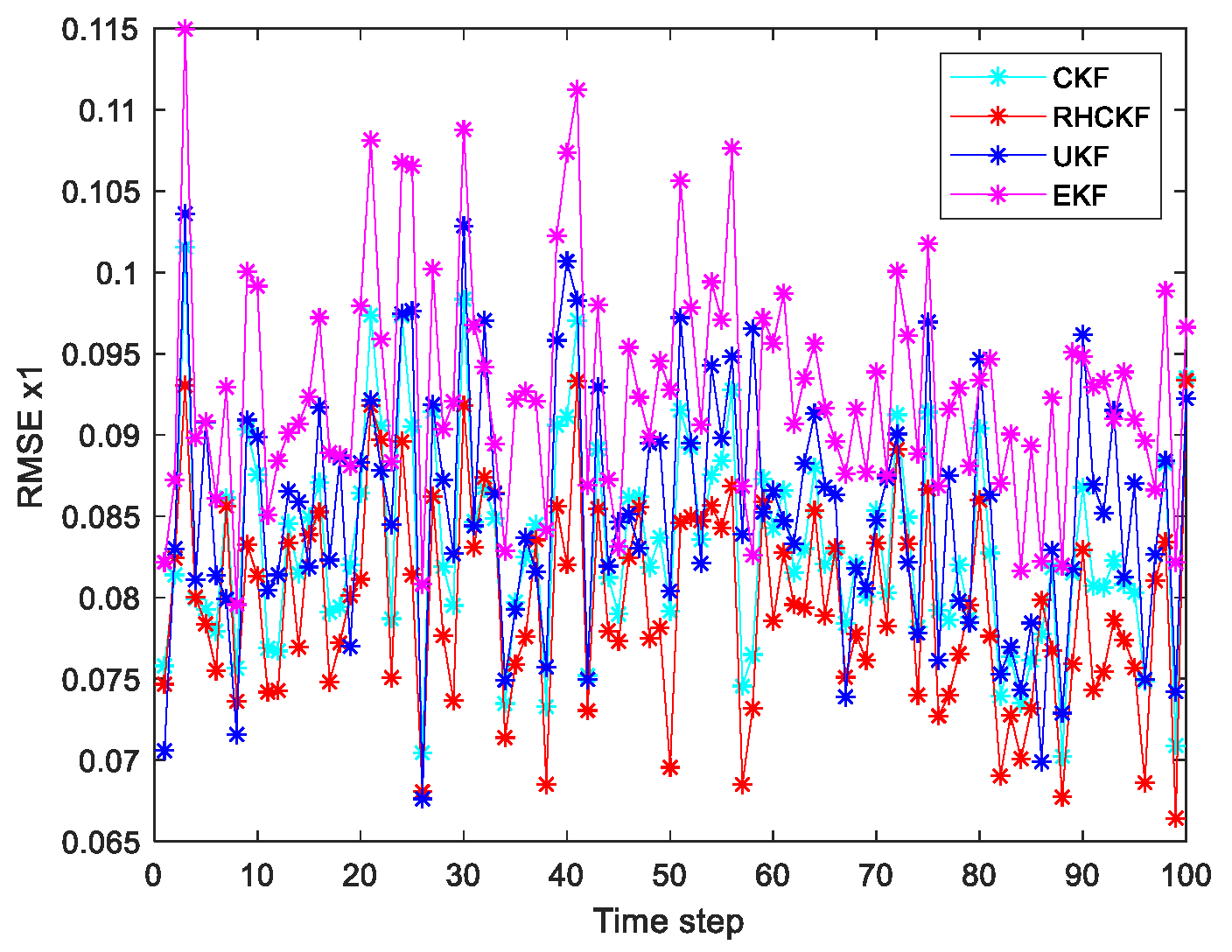
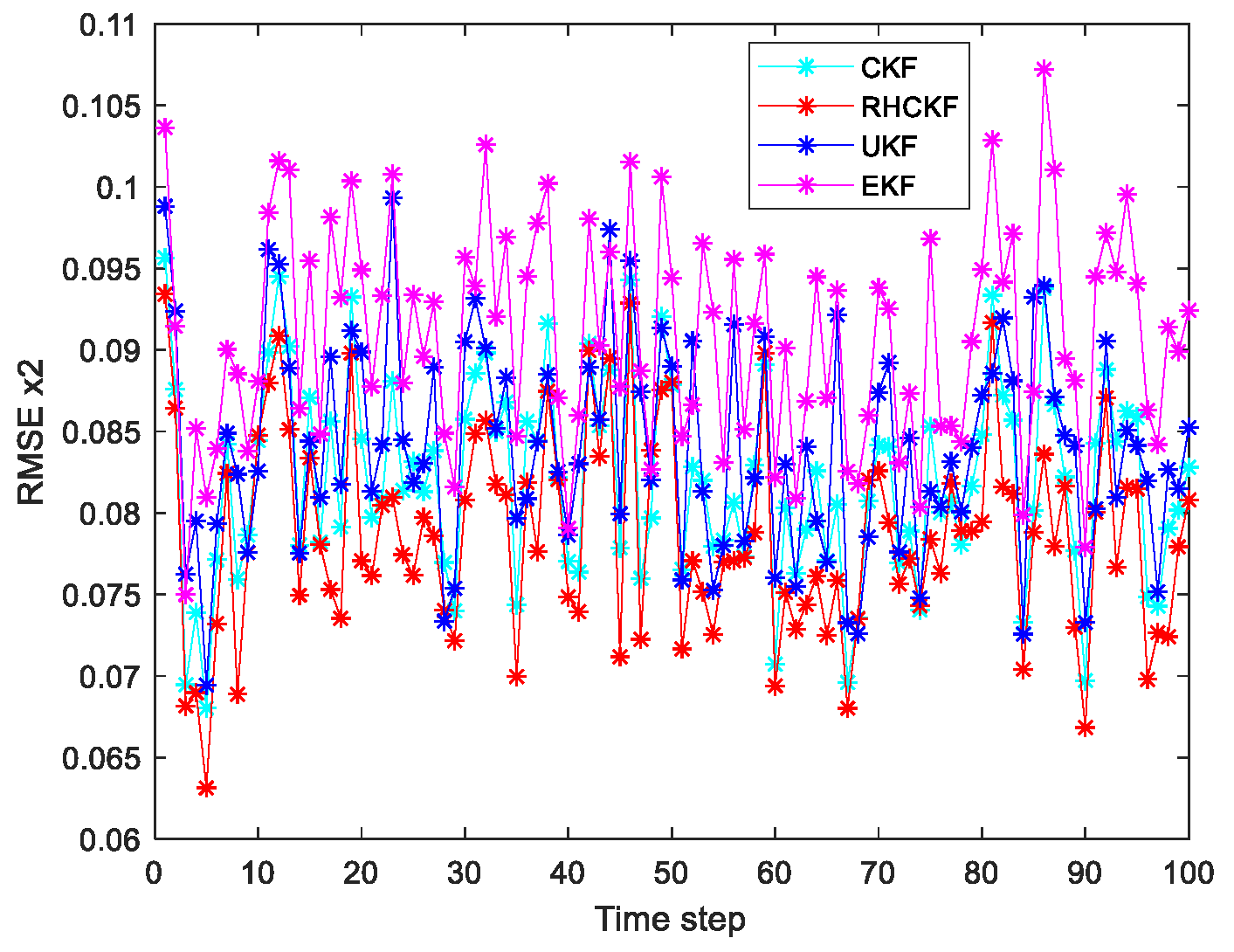
5.1. Experiment I
5.2. Experiment II
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The (l − 1)-Order Rounding Error Calculation Steps
Appendix B. The Prediction Error Covariance Matrix Calculation Process
References
- Li, L.-Q.; Zhao, D.; Luo, C.-D. A Novel Interacting TS Fuzzy Multiple Model by Using UKF for Maneuvering Target Tracking. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar]
- Meles, M.; Rajasekaran, A.; Mela, L.; Ruttik, K.; Jäntti, R. Impact of carrier frequency offset and phase noise on the steering vector for 3D drone localization based on angle of arrival (AOA). In Proceedings of the 2023 16th International Conference on Signal Processing and Communication System (ICSPCS), Bydgoszcz, Poland, 6–8 September 2023; pp. 1–6. [Google Scholar]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhou, D.; Li, J.; Lou, C. Time-varying parameters estimation with adaptive neural network EKF for missile-dual control system. J. Syst. Eng. Electron. 2024, 1–12. [Google Scholar] [CrossRef]
- Arellano-Valle, R.B.; Contreras-Reyes, J.E.; Quintero, F.O.L.; Valdebenito, A. A skew-normal dynamic linear model and Bayesian forecasting. Comput. Stat. 2019, 34, 1055–1085. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, W.; Meng, X.; Shao, H.; Chen, H.J. Sigma-Mixed Unscented Kalman Filter-based Fault Detection for Traction Systems in High-speed Trains. Chin. J. Electron. 2023, 32, 982–991. [Google Scholar] [CrossRef]
- Pagoti, S.K.; Vemuri, S.I.D. Development and performance evaluation of Correntropy Kalman Filter for improved accuracy of GPS position estimation. Int. J. Intell. Netw. 2022, 3, 1–8. [Google Scholar] [CrossRef]
- Bucy, R.S.; Senne, K.D. Digital synthesis of non-linear filters. J. Autom. 1971, 7, 287–298. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Zhou, W.; Hou, J. A new adaptive high-order unscented Kalman filter for improving the accuracy and robustness of target tracking. IEEE Access 2019, 7, 118484–118497. [Google Scholar] [CrossRef]
- Wang, X.-X.; Pan, Q.; Huang, H.; Gao, A. Overview of deterministic sampling filtering algorithms for nonlinear system. Control Decis. 2012, 27, 801–812. [Google Scholar]
- Huber, M.F.; Hanebeck, U.D. Gaussian filter based on deterministic sampling for high quality nonlinear estimation. IFAC Proc. Cuba 2008, 41, 13527–13532. [Google Scholar] [CrossRef]
- Tian, Y.; Huang, Z.; Tian, J.; Li, X. State of charge estimation of lithium-ion batteries based on cubature Kalman filters with different matrix decomposition strategies. Energy 2022, 238, 121917. [Google Scholar] [CrossRef]
- Li, H.; Sun, H.; Chen, B.; Shen, H.; Yang, T.; Wang, Y.; Jiang, H.; Chen, L. A cubature Kalman filter for online state-of-charge estimation of lithium-ion battery using a gas-liquid dynamic model. J. Energy Storage 2022, 53, 105141. [Google Scholar] [CrossRef]
- Peng, J.; Luo, J.; He, H.; Lu, B. An improved state of charge estimation method based on cubature Kalman filter for lithium-ion batteries. Appl. Energy 2019, 253, 113520. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Genz, A. Fully symmetric interpolatory rules for multiple integrals over hyper-spherical surfaces. J. Comput. Appl. Math. 2003, 157, 187–195. [Google Scholar] [CrossRef]
- He, J.; Sun, C.; Zhang, B.; Wang, P. Maximum correntropy square-root cubature Kalman filter for non-Gaussian measurement noise. IEEE Access 2020, 8, 70162–70170. [Google Scholar] [CrossRef]
- Zhang, L.; Cui, N.; Yang, F.; Lu, F.; Lu, B. High-degree cubature Kalman filter and its application in target tracking. J. Harbin Eng. Univ. 2016, 37, 573–578. [Google Scholar]
- Yang, H.; Wang, B.; He, J. Adaptive cubature Kalman filter for unknown noise covariance. J. Air Force Eng. Univ. 2021, 22, 42–47. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Idrovo-Aguirre, B.J.; Contreras-Reyes, J.E. Bayesian monthly index for building activity based on mixed frequencies: The case of Chile. J. Econ. Stud. 2022, 49, 541–557. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methodologies | ||
|---|---|---|
| CKF | 0.0967 | 0.1375 |
| First-order RHCKF | 0.0854 | 0.1281 |
| VS CKF | 13.23% | 7.33% |
| Second-order RHCKF | 0.0826 | 0.1272 |
| VS CKF | 17.07% | 8.09% |
| RMSE | EKF | UKF | CKF | RHCKF | VS EKF | VS UKF | VSCKF | |
|---|---|---|---|---|---|---|---|---|
| state | 0.0928 | 0.0874 | 0.0863 | 0.0821 | 13.03% | 6.45% | 5.11% | |
| 0.0985 | 0.0942 | 0.0935 | 0.0910 | 8.24% | 3.51% | 2.74% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Wen, C. A Higher-Order Extended Cubature Kalman Filter Method Using the Statistical Characteristics of the Rounding Error of the System Model. Mathematics 2024, 12, 1168. https://doi.org/10.3390/math12081168
Zhang H, Wen C. A Higher-Order Extended Cubature Kalman Filter Method Using the Statistical Characteristics of the Rounding Error of the System Model. Mathematics. 2024; 12(8):1168. https://doi.org/10.3390/math12081168
Chicago/Turabian StyleZhang, Haiyang, and Chenglin Wen. 2024. "A Higher-Order Extended Cubature Kalman Filter Method Using the Statistical Characteristics of the Rounding Error of the System Model" Mathematics 12, no. 8: 1168. https://doi.org/10.3390/math12081168
APA StyleZhang, H., & Wen, C. (2024). A Higher-Order Extended Cubature Kalman Filter Method Using the Statistical Characteristics of the Rounding Error of the System Model. Mathematics, 12(8), 1168. https://doi.org/10.3390/math12081168