Abstract
We consider situations where rays are reflected according to geometrical optics by a set of unknown obstacles. The aim is to recover information about the obstacles from the travelling-time data of the reflected rays using geometrical methods and observations of singularities. Suppose that, for a disjoint union of finitely many strictly convex smooth obstacles in the Euclidean plane, no Euclidean line meets more than two of them. We then give a construction for complete recovery of the obstacles from the travelling times of reflected rays.
1. Introduction
For some , let be disjoint closed convex subsets of Euclidean 2-space , with each boundary a strictly convex Jordan curve. Let be contained in the interior of the bounded component B of , where is also a strictly convex Jordan curve.
By a geodesic or, equivalently, a ray in the closure M of , we mean a piecewise-affine constant-speed curve whose junctions are points of reflection on with equal angles of incidence and reflection. The restriction of to an interval is also called a geodesic. Given , the set of all geodesics with is denoted by . Then, is critical for the length functional
over constant-speed piecewise- curves satisfying . We write
Then, by Theorem 1.1 of [1], K is uniquely determined by its travelling-time data
namely by the travelling times of geodesics joining pairs of given points on C. Similar results are proved in [2] for obstacles in where . Unfortunately, the proof of Theorem 1.1 in [1] is not constructive: all that is shown is that is different for different convex obstacles K. When , it is straightforward to calculate K from , and with a little more effort K can also be reconstructed when (see Section 4 in [3]). More interestingly, Theorem 1.1 of [4] allows the area of K to be computed from . Indeed, ref. [4] applies in a much more general setting, where the obstacles are not necessarily convex, and is replaced by a Riemannian manifold of any finite dimension. Importantly, the application of the result in [4] is made possible by the fact (proved in [1]) that the set of points generating trapped trajectories in the exterior of obstacles K considered in this paper has a Lebesgue measure of zero. Constructing K is equivalent to constructing , but this seems difficult for . We refer to [5,6] for general definitions and information about geodesic (billiard) flows on Riemannian manifolds. The present paper shows how to construct from when no line meets more than two connected components of K. Equivalently, K is required to satisfy Ikawa’s no-eclipse condition [7].
Inverse problems concerning metric rigidity have been studied for a long time in Riemannian geometry: we refer to [8,9,10,11] for more information. In the last 20 years or so similar problems have been considered for scattering by obstacles, where the task is to recover geometric information about an obstacle from its scattering length spectrum from travelling times of scattering rays in its exterior [3].
In general, an obstacle in Euclidean space () is a compact subset K of with a smooth (e.g., ) boundary such that is connected. The scattering rays in are generalized geodesics (in the sense of Melrose and Sjöstrand [12,13,14]) that are unbounded in both directions. Most of these scattering rays are billiard trajectories with finitely many reflection points at (there are no reflections at C). When K is a finite disjoint union of strictly convex domains, then all scattering rays in are billiard trajectories, namely geodesics of the type described above. We refer to [15,16,17,18] for general information about scattering theory and, in particular, for scattering by obstacles in Euclidean spaces.
It turns out that some kinds of obstacles are uniquely recoverable from their travelling-times spectra. For example, as mentioned above, this was proved in [2] for obstacles K in () that are finite disjoint unions of strictly convex bodies with boundaries. The case requires a different proof, given recently in [1].
The set of the so-called trapped points (points that generate trajectories with infinitely many reflections) plays a rather important role in various inverse problems in scattering by obstacles, and also in problems on metric rigidity in Riemannian geometry. As an example shown by M. Livshits (see e.g., Figure 1 in [19] or [4]), in general, the set of trapped points may contain a non-trivial open set. In such a case, the obstacle cannot be recovered from travelling times, because of an argument given in [4] due to Livshits based on the reflection properties of planar ellipses. In dimensions examples similar to that of Livshits are given in [19]. Other situations where geometric information cannot be recovered are studied in [20,21].
The layout of this paper is as folllows.
In Section 2, we collect some simple observations about linear (non-reflected) geodesics. This leads to the construction of , so-called vacuous arcs, in , and then initial arcs in . Our plan is to build on the initial arcs, using travelling-time data from reflected rays to construct incremental arcs in , until eventually the whole of is found. (Note however that, unlike the initial arcs, there are countably many incremental arcs, yielding diminishing additional information from ever-increasing amounts of precisely known data. In practice, insufficient data and limited computing power makes it difficult to carry out more than a few inductive steps, and is found only approximately.) In Section 6 we describe an inductive step for constructing incremental arcs from previously determined arcs and from observations of . To make the relevant observations, we need to understand some of the mathematical structure of .
The first step towards this understanding is made in Section 3, where some simple facts about (typically non-reflected) geodesics are recalled. These facts, including a known result for computing initial directions of geodesics, are applied in Section 4 to investigate the structure of travelling-time data of nowhere-tangent geodesics. In particular, cusps in so-called echographs of correspond to geodesics that are tangent to .
The family of all such cusps is studied in Section 5, where the augmented travelling-time data are shown to be the closure of a countable family of disjoint open arcs . As described in Section 6, the property of extendibility can be checked for each . When is extendible, it yields an incremental arc in . When is not extendible, a trick using no-eclipse replaces by an extendible yielding an incremental arc as previously described.
Although our methods are elementary, the construction is intricate, requiring numerous steps and different notations. A glossary of terms and notation is given as Table 1 at the end of this paper.

Table 1.
Glossary of Terms and Notations.
2. Linear Geodesics and Vacuous Arcs
From now on let be an obstacle in , where are disjoint closed convex subsets of with boundaries that are strictly convex Jordan curves. As before, assume that K is contained in the interior of the bounded component B of , where is also a strictly convex Jordan curve. We also assume that K satisfies no-eclipse. For the following lemma, it is not enough to require that a geodesic may not be tangent to at more than two points. Nor is it sufficient to assume that a line in may not be tangent to at more than 2 points. However, no-eclipse implies both these conditions, as is easily seen.
Lemma 1.
Geodesics in Γ are not tangent to , except perhaps at the first or last points of contact with (either or both).
Proof.
If tangency was at an intermediate point of contact, the tangent line would have common points with at least 3 connected components of K, contradicting no-eclipse. □
We begin by investigating travelling-times of linear geodesics, namely geodesics in that do not reflect at all. The travelling-time data from linear geodesics can be obtained as follows:
Excluding points of the form , we obtain
where is defined as the travelling-time data from linear geodesics meeting exactly q times tangentially and nowhere else. By Lemma 1, for ; namely . In the simplest case where , is empty, and is constructed as the envelope of the smooth family of line segments, where . Suppose from now on.
Proposition 1.
is a union of nonintersecting bounded open arcs whose boundaries in comprise , which is finite of size .
Proof.
For there are 8 directed Euclidean line segments (linear bitangents) tangent to both and . Each directed linear bitangent is an endpoint of two maximal open arcs of directed line segments that are singly tangent. The travelling-time data for the linear bitangents are . The travelling-time data for the open arcs are the path components of . □
Therefore, n is found from .
Definition 1.
For the conjugate is defined to be or according as or .
Evidently . Order the arcs in so that . The initial arcs in are the nonempty disjoint connected open subsets of found as the envelopes of the , where for . For each there are initial arcs in .
3. Nonlinear Geodesics
Define to be the space of geodesics that are tangent exactly q times to . The corresponding travelling-time data are denoted by . Most nonlinear geodesics are nowhere-tangent; namely, they lie in . Their travelling-time data will be used to construct travelling-time functions for Lemma 3, as needed for Propositions 3, 4 of §4.
Whereas is found by simple inspection of , some effort is required to isolate , which is needed to construct envelopes of nonlinear singly tangential geodesics. We recall some known results about directions of geodesics and travelling times.
For let be the geodesic satisfying and . The endpoint map is the continuous function given by . Then, is the length of the restriction . Although is continuous, it is not differentiable at points , where is tangent to .
Lemma 2.
For , suppose that is nowhere tangent to , and that . Then is smooth near , and the restriction of its derivative to is a linear isomorphism.
Proof.
For variable perturbations of with sufficiently small, the are also nowhere-tangent to . Here we identify with ℂ in the standard way. Considering the effects of repeated reflections of the , we find by routine calculation that the regular parameterised curve
meets the geodesic transversally at ; namely, is not a multiple of . For variable perturbations of where is small, the curve
is a geodesic. Indeed, a reparameterisation of part of with velocity at . Therefore, and are linearly independent. □
Lemma 3.
For and with the hypotheses of Lemma 2, there exists an open neighbourhood of in , and a unique function whose gradient is everywhere of unit length, satisfying
for all . Here with .
Proof.
By Lemma 2 and the implicit function theorem, there exist a unique function satisfying for all . Because , X is never-zero for sufficiently small. Then the geodesic joining , has length
Differentiating with respect to in the direction of , we find , because geodesics are critical for J when variations have fixed endpoints. □
The order of a geodesic is the number of intersections with . Write
Let be the minimum distance between obstacles. Writing for the travelling time (length) of ,
4. Arcs and Generators for Nowhere-Tangent Geodesics
Recall that is the space of geodesics that intersect precisely r times, and that is the space of geodesics that are exactly q-times tangent to . Because of no-eclipse and Lemma 1, is empty for . Set
Recall that is the travelling-time data from geodesics meeting exactly q times tangentially, and nowhere else. Then, and for . We have shown how to construct , but not yet from for .
For define
Likewise is the set of geodesics with . Set
Although is found directly from the given travelling-time data , we have yet to show how is found from for (this is done in the paragraph following Corollary 1 below).
It is easily seen that is open and dense in , that is open and dense in , and that is discrete.
Proposition 2.
has at most elements, and is empty for in an open dense subset of C.
Proof.
By Lemma 1, the first and last segments of any are tangent to . Because is strictly convex, there are at most such geodesics. Therefore, has a size at most of . A small perturbation of causes a perturbation of the last points of tangency of , destroying the first points of tangency, by strict convexity. □
Proposition 3.
For , we have , where
- 1.
- the are countably many pairwise-transversal open bounded arcs in ,
- 2.
- ,
- 3.
- each has a generator, namely a function with open, such that
- is an open arc in C, and is a diffeomorphism from onto ,
- , where for .
Proof.
For , there exists with . Then, , where . By Lemma 3, for some open neighbourhood of in , there is a unique function with and , such that for all . In particular, the last equation holds for ; namely, embeds in . By continuation, the embedding extends uniquely in both directions around C, until just before is tangent to some , which must eventually happen. Therefore, is a countable union of embedded arcs .
Pairwise transversality is proved by contradiction as follows. Suppose meet tangentially at . Then where , and is tangent to C at . By Lemma 3, and point out from the bounded component B of at . Therefore, by Lemma 3, contradicting .
Because is open and dense in , . □
By continuity, the orders of the are independent of . From (1) we obtain, for all ,
and the arcs are similarly bounded. For any i, the closures and in are disjoint for all but finitely many , where . The generator defines for every . For , define
Then , and where .
Proposition 4.
If then for some unique with . Then and are on the same side of in C and, for , . We also have
Proof.
Write , where has length t and . Suppose the last (respectively first) segment of is not tangent to . Then, by no-eclipse, the first (last) segment is tangent. Perturbing the last segment while maintaining the endpoint gives two arcs of nowhere-tangent geodesics, whose initial points lie on the same side of in C. Along one arc, the first (last) segment remains linear and the order decreases by 1. Along the other arc, the first (last) segment breaks into two linear segments, maintaining the order and increasing the travelling-time.
Write . For near , the two arcs of geodesics define arcs , in contained in maximal arcs , labelled so that . Then , and . We also have , and . □
Because is dense in , Propositions 3 and 4 have the
Corollary 1.
is the closure of a union of locally finite pairwise-transverse open bounded arcs, whose endpoints are cusps at points in .
A embedding of in is given by , with some constant-length nonzero outward-pointing normal field. Cusps in are found by inspecting the echograph at , defined as . The open arcs joining cusps are the for the of Proposition 3. By Proposition 2, for in an open dense subset of C, the cusps are at points in .
Example 1.
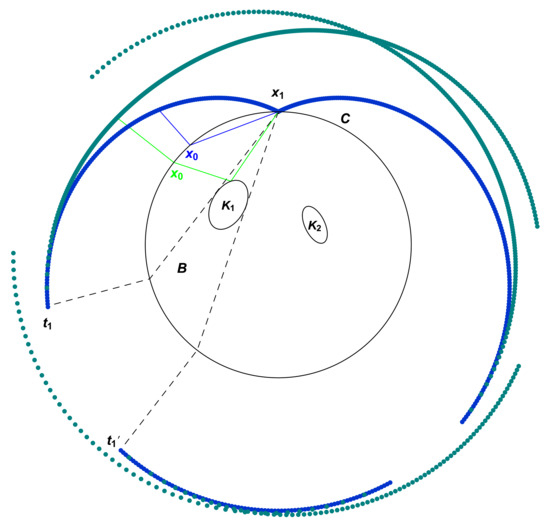
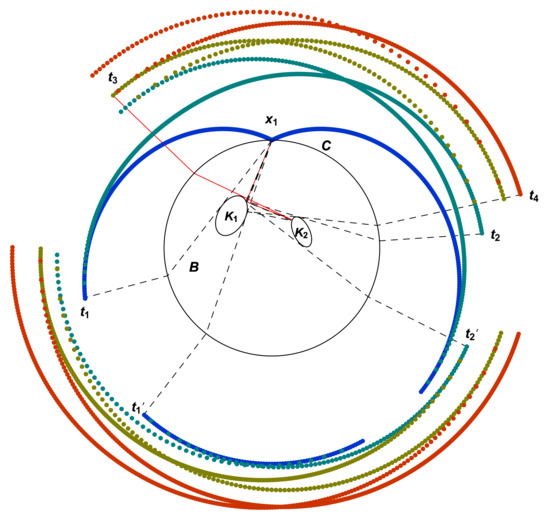
Figure 1 displays the part of corresponding to travelling-time data for 0 or 1 reflections by obstacles, with and C the circle of radius 4 and centre . For starting at and moving south-westerly along C, the blue line from to doesn’t intersect at all; namely, it is a linear geodesic whose travelling-time data are in . As moves downwards towards the endpoint of the dashed tangent, the echograph (shown outside B) traces out a blue curve from to the endpoint . The other blue parts of the echograph also correspond to travelling-time data from linear geodesics (0 reflections). The green parts of the echograph in Figure 1 correspond to travelling-time data of geodesics for 1 reflection, such as the green geodesic starting north-westerly from reflecting once on to .
Figure 1.
Part of the echograph (0 and 1 reflections), in Example 1.
More of the echograph is shown in Figure 2, where parts corresponding to travelling-time data for 2 reflections (olive) and 3 reflections (red) are also incorporated. For instance, the twice-reflecting red geodesic tangent to defines the cusp on the echograph. The other cusps also correspond to tangent geodesics, as indicated. The echograph is mainly smooth, but different smooth arcs (blue, green, olive and red) meet in cusps, and 6 transversal self-intersections are seen. The smooth arcs in Figure 2 are some of the where the are the open intervals of Proposition 3 (in no particular order). Cusps (labelled ) correspond to tangencies of geodesics ending at to or .
Figure 2.
More of the echograph in Example 1.
Our construction of K uses each cusp in an echograph to determine a pair of lines, one of which is tangent to . By Lemma 1, there is a tangent line which is the extension of either the initial segment of the geodesic from , or the terminal segment to . The pair of lines is determined from using the echograph (additional work is carried out later to determine which of these is tangent). Then 1-parameter families of tangent lines are constructed by varying the echograph which depends on . Finally, the are found as unions of envelopes of families of tangents.
Next we augment and to data sets and that include the initial velocities of geodesics. We first exclude points of intersection of the open arcs in Proposition 3 (these points are reinserted later) by defining .
Remark 1.
Any intersects at most finitely many . Because intersections of and are transversal for , is dense in , and
Remark 2.
The partition . The generators restrict to functions on the open subsets
of C.
For , define to be the unit vector pointing inwards from C. Then set
To reinsert the excluded points, define to be the closure of in
and . Define to be the closure of in
and . For define
5. Singly-Tangent Geodesics
Summarising so far, for :
- is read directly from ;
- (respectively ) is the non-smooth (respectively smooth) part of ;
- we have seen how to find arcs and generators for ;
- and are obtained using the ;
- and are found by varying .
Proposition 5, below, is a structural result, analogous to Proposition 3, which will be used to distinguish from . A geodesic is said to be bitangent when it has two points of tangency to . Recall that is linear when it has no other points of contact with .
Proposition 5.
For a countable locally finite family of disjoint bounded open arcs in :
- 1.
- ;
- 2.
- for ; , where the are the vacuous arcs in , defined in Section 2;
- 3.
- for every (Including possibly ) there is a diffeomorphism where is an open arc in C, and for all ;
- 4.
- each is an endpoint of four open arcs , where three of are on one side of , and one is on the other side;
- 5.
- .
Proof.
For , we have and . Now, is tangent to at precisely one point. By Lemma 1, this is either the first or last point of contact with .
If the tangency is first, then perturbing the point of tangency in gives a small open arc around contained in . Similarly, if the tangency is last, an open arc in is given by perturbing the point of tangency in . Therefore, the path components of in are connected smooth 1-dimensional submanifolds of . They are bounded, nonclosed and, for , can be listed as augmentations of the . Thus, 1. and 2. hold.
For , the geodesic is tangent to at both the first and last points of contact, and nowhere else. Nearby geodesics in are obtained by maintaining tangency either at a variable first point of contact, or at a variable last point of contact with . The tangencies at first (respectively last) points of contact generate arcs (respectively ) in , separated by .
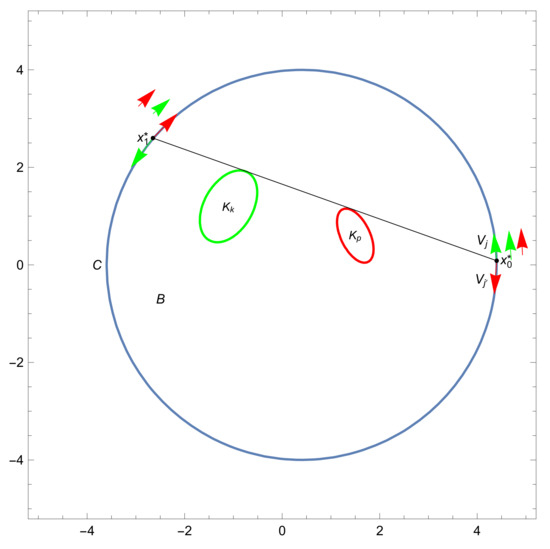
When the bitangent geodesic is linear, there is an open arc of initial points of perturbations initially tangent to , and another open arc of initial points of perturbations initially tangent to , as in Figure 3, where appear on the right of the illustration. Perturbations whose initial points are in (green) and (red) have no other points of contact with . There are also two unlabelled open arcs bordered by , consisting of initial points of geodesics whose first points of contact are nontangent to , and whose second points of contact are tangent to (green) or (red), respectively. Similarly, the green and red arrows on the left of Figure 3 and Figure 4 indicate intervals of terminal points of perturbations.
Figure 3.
A linear bitangent (proof of Proposition 5).
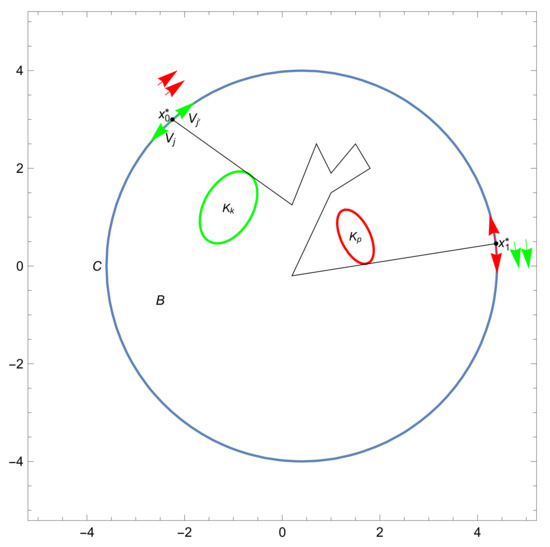
Figure 4.
A nonlinear bitangent geodesic (proof of Proposition 5).
Evidently, , because and are on opposite sides of , and similarly, in Figure 3. Indeed, from the geometry of perturbations of , all of are distinct.
In Figure 4, the nonlinear bitangent geodesic is tangent to and at the first and last points of contact, respectively. It is not tangent anywhere else to , but is reflected at other points of contact, as suggested by the illustration. As before, the nonlinear bitangent is perturbed while maintaining tangency either with (green) or with (red), but now the first and last points of contact remain on and , respectively. The initial points of perturbations tangent to sweep out open arcs (green) on either side of . Initial points of perturbations tangent to give the other intervals on one side of , as indicated by the two red arrows on the left of Figure 4. Again, are distinct.
An element of corresponds precisely to the point of tangency (first or last contact) of with . Because there is only one point of tangency it corresponds diffeomorphically to . This proves 3.
Thus, that is an endpoint of precisely 4 open arcs and 4. are proved.
Because is open in , . Because is dense in , , proving 5. □
Corollary 2.
is the smooth part of the 1-dimensional space .
Remark 3.
For the for depend only on . Therefore, we may write them as .
We need the following definitions:
- The open arcs where are said to be vacuous;
- For denote the undirected line through parallel to by ;
- For define by where ;
- Denote the envelope of by .
6. Extendible Arcs and the Inductive Step
At the end of Section 2 the travelling-time data are used to find open arcs . Each of these is augmented, as described in Proposition 5, to a vacuous open arc . From the definition in Section 2 of the conjugate of j, for ,
We also obtain parameterisations . More generally (inductively), suppose we have this kind of information where possibly .
In precise terms, suppose we are given a parameterisation of some possibly nonvacuous arc . Here, is a maximal open arc with the property that, for all and , the first segment of the geodesic is tangent to . The inductive step extends the open arc by adjoining another such arc to its clockwise endpoint, as follows.
For , the clockwise terminal limit of , set
By Proposition 5, there are three other open arcs adjacent to at , and the unordered set is found by inspecting . In the proof of Proposition 5, the arcs (respectively ) are generated by geodesics whose first (respectively last) segments are tangent to . From the proof of Proposition 5, has size 1 or 3. Construct
where .
Definition 2.
is an extension of when the closure of is a strictly convex arc in . When an extension of exists, the arc is said to be extendible (otherwise nonextendible).
Proposition 6.
If is extendible, the extension is unique, and is an arc in . If is nonextendible, then is vacuous and is extendible.
Proof.
By continuity of , the bitangent is tangent to at some where , and q is a limit of points of first tangency and first contact with . By no-eclipse, q is either the first point of contact of the bitangent with or the second point of contact. □
If q is the first point of contact, then is extended by , whose associated geodesics maintain tangency to . Evidently, is an arc in .
For or , and near , the last points of contact of are tangent to near where . By the argument in §3 of [1], the are not all tangent to a strictly convex arc; namely, is not strictly convex, and does not extend . Therefore, the extension is unique.
If, alternatively, q is the second point of contact, then the first point of tangency is at where with . By Lemma 1, is the first point of contact of the bitangent with . By Lemma 1, and because q is the second point of tangency, the bitangent is linear with , the only points of contact with . Therefore, , and is the first point of contact of the linear bitangent with . Then is extended by requiring tangency to of the associated geodesics.
The arc in is therefore extended by an incremental arc , where is an extension either of or of . This completes the inductive step.
Now the construction of proceeds as follows. First, is chosen with , and the inductive step is carried out repeatedly with replacing after each step, until the incremental arcs in are acceptably small. Countably many repetitions would be needed for perfect reconstruction. Then another vacuous arc is used to restart the iterative process. This is repeated until all the vacuous arcs are used. Finally, is the union of the closures of all the arcs (initial and incremental) in .
7. Conclusions
For unknown disjoint obstacles contained in a compact m-manifold manifold with boundary B in Euclidean m-space , rays in B from to itself are reflected in the usual way by (but not by C). The problem is to find information about the obstacles from measurements of travelling times of reflected rays (geodesics). Even when B and the are smoothly embedded m-dimensional balls, the travelling times sometimes do not determine the obstacles, as seen in the 2-dimensional examples of Livshits and those in [19] where . These cases are excluded by requiring B and to be smooth, strictly convex embeddings of the m-dimensional unit ball. Then the are uniquely determined by the travelling times [2] for . Unfortunately, the proof in [2] is not constructive and gives no clue about how the might be found. This remains problematic, at least for , even when .
This most elementary case is studied in the present paper, assuming the no-eclipse hypothesis given in Section 1. Then, the number n of obstacles is found from travelling times using Proposition 1. We go on to reconstruct , as follows.
First, Lemma 3 uses travelling-time data of nowhere-tangent geodesics to construct functions , from which initial directions of geodesics at points on some subintervals of C can be calculated. Then C is the union of the closures of maximal subintervals. The maximal subintervals are found from the travelling-time functions , using Proposition 3. Corollary 1 identifies endpoints of maximal subintervals by finding cusps in sets found from travelling times of geodesics that end on points . In Section 4, these sets and the cusps are displayed in echographs.
Cusps in echographs correspond to geodesics ending at that are singly tangent to the . In Section 5, we keep track of singly tangent geodesics as varies. Proposition 5 finds that the singly tangent geodesics define maximal open intervals in another computable set. The endpoints of the subintervals correspond to geodesics that are twice tangent to .
This is all put together in Section 6, where, using no-eclipse, Proposition 6 shows how to find countably many families of lines that are singly tangent to the . Then is determined as the closure of the union of the envelopes of these countably many families. Therefore, in theory, the are completely determined from travelling-times.
This construction is a complicated recipe that would be difficult to implement. In practice, we find only finitely many of the countable families of tangent lines, focusing first on families where lines correspond to geodesics that are once, twice, or maybe three times reflected. Even this requires extremely accurate measurements of travelling times, very large amounts of data and substantial computational effort to detect smooth families of cusps in echographs, then to accurately calculate envelopes. Then, large parts of the are found, but not all. The scope of the present paper is necessarily limited: our ambient space is flat with , and the are smooth, strictly convex and satisfy no-eclipse.
Author Contributions
Conceptualization, L.N. and L.S.; data curation, L.N. and L.S.; formal analysis, L.N. and L.S.; investigation, L.N. and L.S.; methodology, L.N.; writing–original draft, L.N. and L.S.; writing–review and editing, L.N. and L.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
We are grateful to the three reviewers for their careful reading and for many constructive suggestions that have greatly improved the presentation.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Noakes, L.; Stoyanov, L. Lens rigidity in scattering by unions of strictly convex bodies in R2. SIAM J. Math. Anal. 2020, 52, 471–480. [Google Scholar] [CrossRef]
- Noakes, L.; Stoyanov, L. Rigidity of scattering lengths and travelling times for disjoint unions of convex bodies. Proc. Amer. Math. Soc. 2015, 143, 3879–3893. [Google Scholar] [CrossRef]
- Noakes, L.; Stoyanov, L. Traveling times in scattering by obstacles. J. Math. Anal. Appl. 2015, 430, 703–717. [Google Scholar] [CrossRef]
- Stoyanov, L. Santalo’s Formula and stability of trapping sets of positive measure. J. Differ. Equ. 2017, 263, 2991–3008. [Google Scholar] [CrossRef][Green Version]
- Chavel, I. Riemanian Geometry: A Modern Introduction; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Cornfeld, I.P.; Fomin, S.V.; Sinai, Y.G. Ergodic Theory; Springer: Berlin, Germany, 1982. [Google Scholar]
- Ikawa, M. Decay of solutions of the wave equation in the exterior of several convex bodies. Ann. Inst. Fourier 1988, 38, 113–146. [Google Scholar] [CrossRef]
- Croke, C.; Uhlmann, G.; Lasiecka, I.; Vogelius, M. Geometric Methods in Inverse Problems and PDE Control; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Guillarmou, C. ‘Lens rigidity for manifolds with hyperbolic trapped sets. J. Amer. Math. Soc. 2017, 30, 561–599. [Google Scholar] [CrossRef]
- Guillarmou, C.; Mazzucchelii, M. Marked boundary rigidity for surfaces. Ergodic Th. Dyn. Sys. 2018, 38, 1459–1478. [Google Scholar] [CrossRef]
- Stefanov, P.; Uhlmann, G.; Vasy, A. Boundary rigidity with partial data. J. Amer. Math. Soc. 2016, 29, 299–332. [Google Scholar] [CrossRef]
- Hörmander, L. The Analysis of Linear Partial Differential Operators; Springer: Berlin, Germany, 1985; Volume III. [Google Scholar]
- Melrose, R.; Sjöstrand, J. Singularities in boundary value problems I. Comm. Pure Appl. Math. 1978, 31, 593–617. [Google Scholar] [CrossRef]
- Melrose, R.; Sjöstrand, J. Singularities in boundary value problems II. Comm. Pure Appl. Math. 1982, 35, 129–168. [Google Scholar] [CrossRef]
- Lax, P.; Phillips, R. Scattering Theory; Academic Press: Amsterdam, The Netherlands, 1967. [Google Scholar]
- Lax, P.; Phillips, R. The scattering of sound waves by an obstacle. Comm. Pure Appl. Math. 1977, 30, 195–233. [Google Scholar] [CrossRef]
- Majda, A. A representation formula for the scattering operator and the inverse problem for arbitrary bodies. Comm. Pure Appl. Math. 1977, 30, 165–194. [Google Scholar] [CrossRef]
- Melrose, R. Geometric Scattering Theory; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Noakes, L.; Stoyanov, L. Obstacles with non-trivial trapping sets in higher dimensions. Arch. Math. 2016, 107, 73–80. [Google Scholar] [CrossRef]
- Plakhov, A. Exterior Billiards: Systems with Impacts Outside Bounded Domains; Springer: New York, NY, USA, 2012. [Google Scholar]
- Plakhov, A.; Roshchina, V. Invisibility in billiards. Nonlinearity 2011, 24, 847–854. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).