Abstract
In this study, the challenges of the controller design of a class of Uncertain Switched Neutral Systems (USNSs) in the presence of discrete, neutral, and time-varying delays are considered by using a robust observer-based control technique. The cases where the uncertainties are normbounded and time-varying are emphasized in this research. The adopted control approach reduces the prescribed level of disturbance input on the controlled output in the closed-loop form and the robust exponential stability of the control system. The challenge of parametric uncertainty in USNSs is solved by designing a robust output observer-based control and applying the Yakubovich lemma. Since the separation principle does not generally hold in this research, the controller and observer cannot be designed separately, sufficient conditions are suggested. These conditions are composed of applying the average dwell time approach and piecewise Lyapunov function technique in terms of linear matrix inequalities, which guarantees robust exponential stability of the observer-based output controller. Finally, two examples are given to determine the effectiveness of the proposed method.
1. Introduction
Switched systems are a category of hybrid systems consisting of several subsystems activated via switching signals [1,2,3]. Switched systems are extensively employed in modeling various dynamic systems [4,5,6], for instance, chaotic systems [7], traffic control [8], singular systems [9], networked nonlinear systems [10], chemical processes [11], and mechanical systems [12]. Time delay exists in several practical and engineering systems, such as chemical processes [13], nonholonomic systems [14,15], electrical circuits [16,17,18], descriptor systems [19], and biological systems [20]. This phenomenon causes the system to perform poorly and can even lead to instability [21]. In practice, time delays exist not only in the states but also in their derivatives. Time-Delay Neutral Systems (TDNSs) can be found in chemical processes, population dynamics, and water pipes [22]. However, Switched Neutral Systems (SNSs) stability is a challenging problem [23,24]. Several Lyapunov-based methods have been proposed to study the stability of SNSs. Dwell time (DT) and Average Dwell Time (ADT) methods have been applied for studying the stabilization of SNSs [25,26]. The problem of stabilization and robust guaranteed cost control of a switched neutral system in the presence of uncertain interval time-varying delays via the dynamic output feedback approach has been focused on in [26]. The existing condition of an appropriate controller for stabilization and control of the system is changed to solve an iterative convex optimization problem in the form of LMI [26]. Furthermore, uncertainty terms, such as environmental noises, parametric uncertainties, and external disturbances, are frequently encountered in numerous engineering applications, and the exact mathematical model development is difficult [27,28,29,30]. Additionally, the presence of uncertainties can degrade the performance of the closed-loop system and even lead to instability. There are several uncertain sources, such as ambient noise, parameter variations, modeling and measurement errors, linearization approximation, and disturbance, in real-world systems. By considering the uncertainty in SNSs, the obtained systems can be named Uncertain Switched Neutral Systems (USNSs). Thus, investigating the robust control approaches of USNSs is critical in both theory and practice [31,32]. In [33], the robust stabilization of USNSs has been investigated with constant delay and parametric uncertainty. In [34], the problem of exponential stabilization has been studied for USNSs with time-varying uncertainties. In the studied work, the neutral delay is constant. Using the ADT approach and the piecewise Lyapunov functional technique, Reference [22] proposed the exponential stabilization condition of USNSs with norm-bounded uncertainty, nonlinear perturbations, and neutral delays [35]. Though the various research methods have been investigated in the works mentioned above, it appears that the parametric uncertainty should be studied in the state-derivatives matrix. In practice, the state feedback (SF) control fails to guarantee the stability of the system when the state variables cannot be accessed from measurement [36]. Thus, observer-based control designs can be a good option in those cases. In the observer-based control, the output dynamic feedback controller is provided, and the state variables can be estimated from the process. Hence, the observer-based control for Switched Time-Delay Systems (STDSs) with or without a neutral type has been a stimulating subject in the control scheme [37,38,39]. Event-triggered control is an appropriate control approach that can reduce the volume of communications and provide a suitable closed-loop performance. This strategy and an observer-based output feedback control have been designed for SNSs, considering the mixed time-varying delays [40,41,42,43]. Another expectation in many practical systems is control. This concept has been presented to decrease the disturbance input effect on the regulated output at a given level and satisfy the stability of the closed-loop system. In recent years, control has received extensive attention in switched systems, with or without delays.
This paper designs a robust control law for a class of USNSs with interval time-varying delays and norm-bounded uncertainties. Its main contributions are as follows:
- -
- It addresses the stabilization and control problem of Uncertain Switched Neutral Systems with interval time-varying delays in the system states and their time-derivatives.
- -
- It solves the parametric uncertainty problem in USNSs by designing a robust observer-based control and applying the Yakubovich lemma.
- -
- It suggests sufficient robust exponential stability conditions using the average dwell time approach and piecewise Lyapunov function technique in terms of a set of linear matrix inequalities.
- -
- When the system state variables cannot be measured, the observer-based control approach applies to the stability guarantee. In this study, the separation principle was not met.
- -
- The problem of the USNSs with interval time-varying delays that existed in the state and its derivatives (neutral) is addressed in this paper.
- -
- Due to this study considers the time-varying and explored uncertainties in the state derivatives matrix, the presented model is closer to the practical situations.
- -
- To notice the decay rates, as an important feature of real cases, the exponential stability or stabilization is considered here.
- -
- The upper bound of the discrete and neutral delays and their derivatives are effective in this paper designing procedure, causing the treatment to be more general with less conservatism compared to the literature approaches.
The remainder of the article is organized as follows: Section 2 provides the definitions, lemmas, and description of USNSs. In Section 3, the problem of robust output observer-based control for USNS is given. Section 4 illustrates the performance of the proposed approach via a numerical example. Some concluding remarks are finally given in Section 5.
2. Problem Formulation and Preliminaries
Consider the following class of USNSs:
where , , , and are the state vector, the control input vector, the measurement output vector, and the controlled output, respectively. For convenience, is considered in this study. , , , , and are the system matrices with time-varying uncertainties. These uncertainties are assumed to be
where , , , and are the given constant matrices. , , , , , and are the known constant matrix of appropriate dimensions. is the continuous vector-valued function specifying the initial state of the system. is a switching signal. In addition, means that the 𝑖th subsystem is activated. The following observer-based control is proposed for the stabilization of the USNS introduced in (1):
where is the estimation of the state vector, is the observer output vector, and are the controller gains, is the observer gain, and , , and are matrices to be specified. Applying (2) to (1) yields:
For the sake of convenience, define , where the signal is defined as the estimated error of the USNS, and
The following assumptions, definitions, and lemmas are considered in the control design.
Assumption 1.
The delayis the time-varying neutral delay satisfying
and is the discrete delay meeting
Assumption 2.
The time-varying matrices, andare assumed to be norm-bounded with appropriate dimensions satisfying the following condition:
where and and are the constant matrices, and is the unknown continuous time-varying matrix function with Lebesgue measurable elements, satisfying:
The following results can be easily obtained using the Equation (7):
Assumption 3.
Suppose that the matrixis full-row rank. For convenience, the singular value decomposition ofis of the form, whereis a diagonal matrix with positive diagonal elements in decreasing order;andare unitary matrices.
Assumption 4.
The external noise signalis time-varying and satisfies
Definition 1
([44]) For any , let denote the number of switching at an interval . If holds true for any given , , the constant is called the average dwell time. For the sake of convenience and following the common practice in the literature, we consider .
Definition 2
([21]). The USNS (1) is said to be robust and exponentially stable under , if there exist constants and such that
for all admissible uncertainties , where .
Definition 3
([45]). For a prescribed level of disturbance attenuation , find an observer-based control (2) satisfying the following conditions:
- With the USNS (1) with observer-based control (2) is exponentially stabilizable.
- Under zero-initial condition the output satisfies
Lemma 1 (Yakubovich lemma)
([46]). Let and two quadratic matrix functions over , and for all . Then, holds true for all , if and only if there exists the constant such that
Lemma 2.
([47]) For a given with rank ()=, assume that is a symmetric matrix, then there exists a matrix such that if and only if
where and .
3. Observer-Based Robust Control
The class of USNSs given in (1) is considered here. The following theorem proves the stabilization of the USNS (1) via the observer-based control (2) in terms of feasible solutions to a certain set of LMIs.
Theorem 1.
Consider the System (1). Let,,,,, . Assume that there exist matrices,, , , , ,,,, andand positive constantsandsuch that for,
where
then for any switching signal with ADT , where satisfies
System (1) is exponentially stable using the observer-based control (2) with
Furthermore, the estimate of the state decay is given by
where
Proof:
See Appendix A. □
Remark 1.
When, given, we will have, which means that the switching signalcan be arbitrary. Thus, (15) takes the following form
Equation (18) in the form of (19) is considered as
This shows that a common Lyapunov function is required for all subsystems.
Remark 2.
This study presents a controller design method applying the observer to realize exponential stabilization. The LMI approach is employed for the expression of the existing condition. For more closeness between the model and the real system, uncertainties, delay (time-varying and neutral), and nonlinear perturbations are inserted into the model, leading to the problem complexity. By this approach, the system dimension and, consequently, LMI size is increased due to the computational complexity.
Remark 3.
The stability is proved, employing the conservative Lyapunov function that guarantees sufficient conditions, not the necessary ones. In this paper, the multiple Lyapunov functions are utilized that are less conservative compared to the common Lyapunov function. For more conservativeness reduction, the ADT approach is used. Besides, the upper bound of the discrete and neutral delays and their derivatives are effective in the designing procedure, causing the treatment to be more general with less conservatism compared to the literature approaches.
Remark 4.
The main differences between the present study and [26] can be summarized as follows. While [26] uses output dynamic feedback, the observer is designed in the present study. In addition, the cost function of [26] is in the form of guaranteed cost control, but this work focuses on the problem of control approach. Besides, convex optimization is employed in order to convert the problem to LMI in [26]; this research utilizes SVD lemma and change of variables.
4. Numerical Example
In this section, two examples are presented for more illustration of the effectiveness of the proposed method.
Example 1.
We consider the USNS described by (1) comprised of two subsystems with the following constant values:
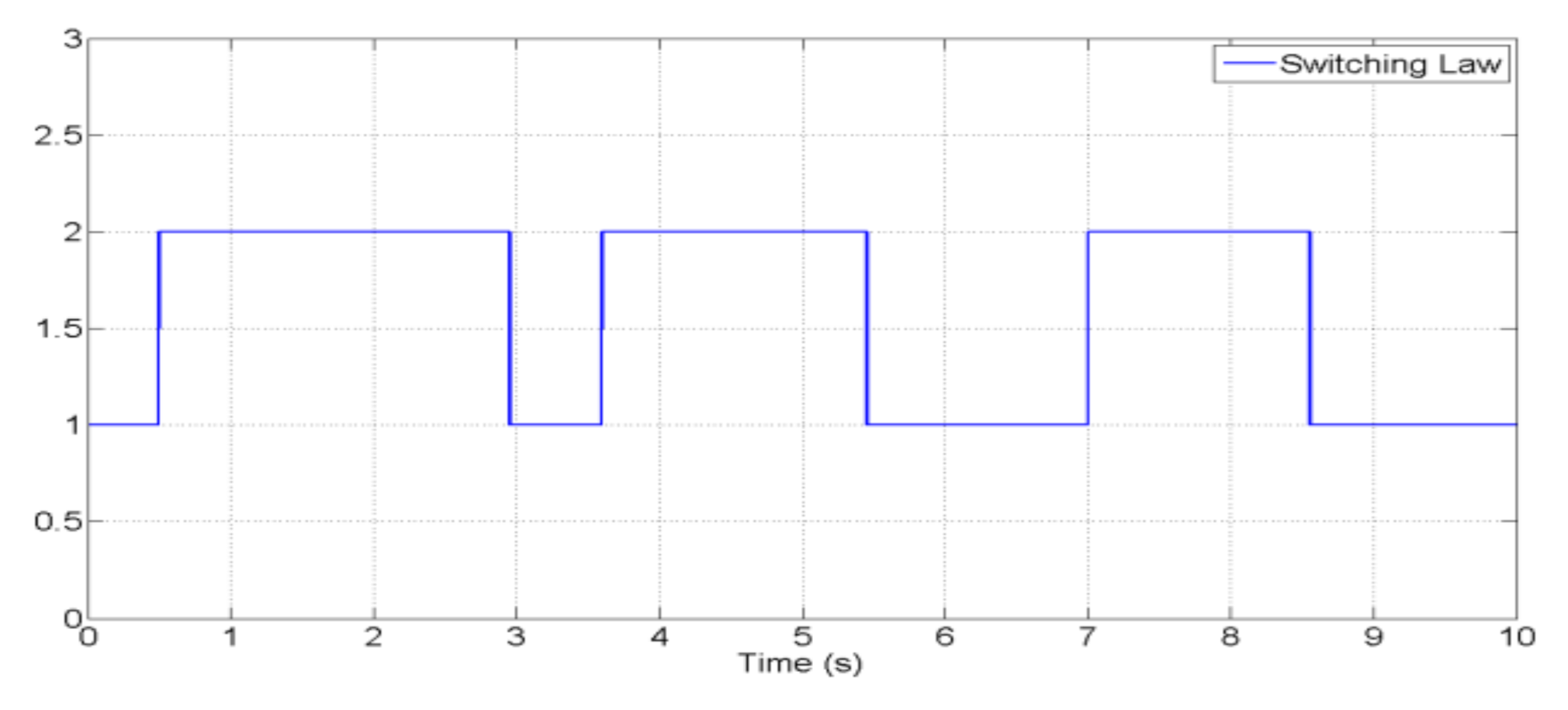
Considering and , we obtain , , , and . The switching signal is shown in Figure 1. A robust output observer-based control in the form of (2) is designed such that system (3) reaches exponential stability. In this section, an output observer-based controller is designed for USNS by setting (thus, ).
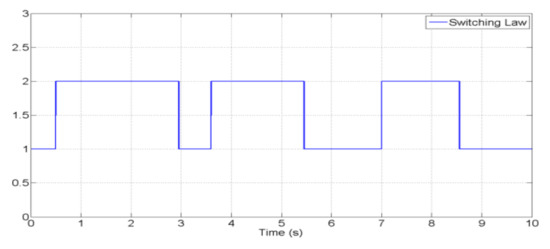
Figure 1.
The switching signal where ADT is .
Solving (14)–(16) gives the following feasible solutions:
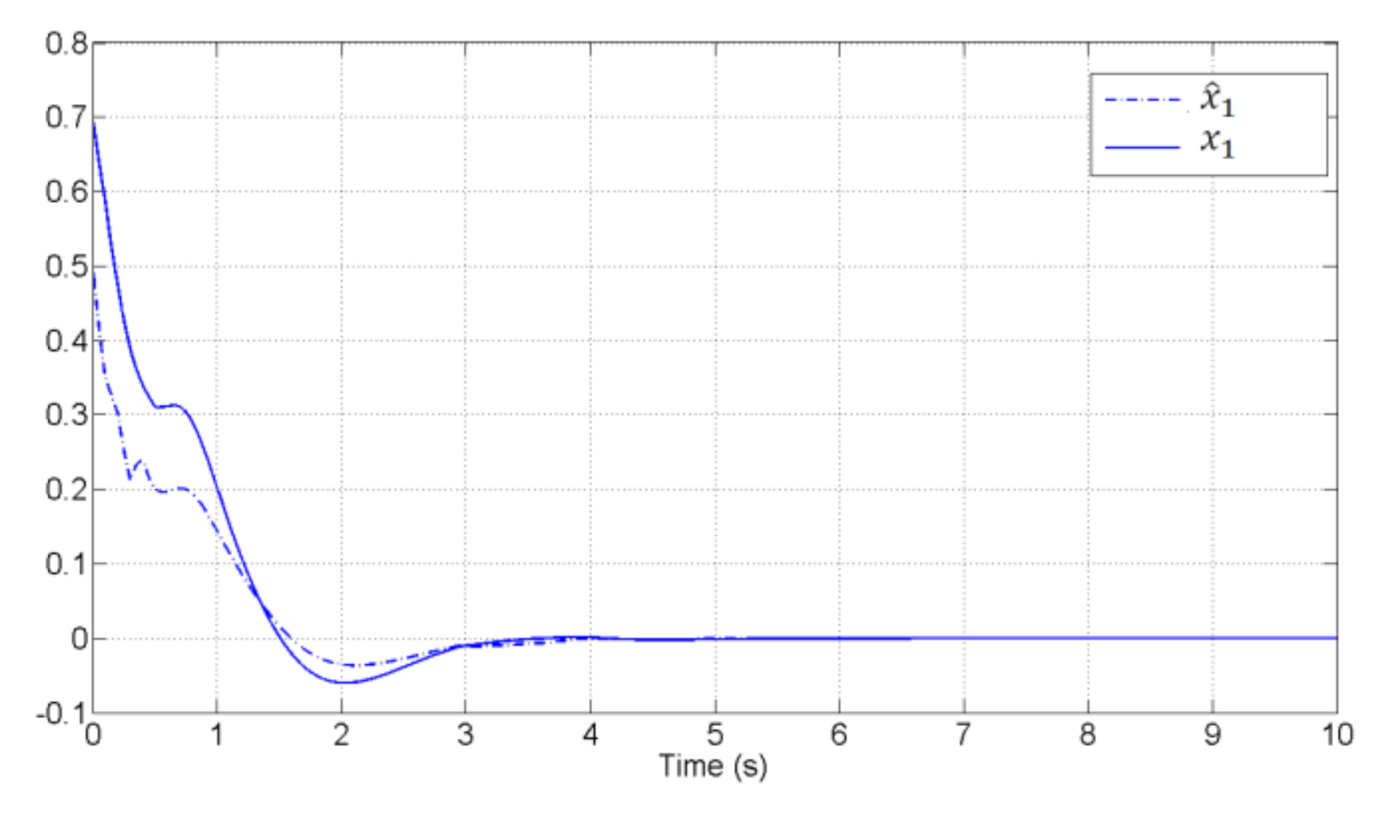
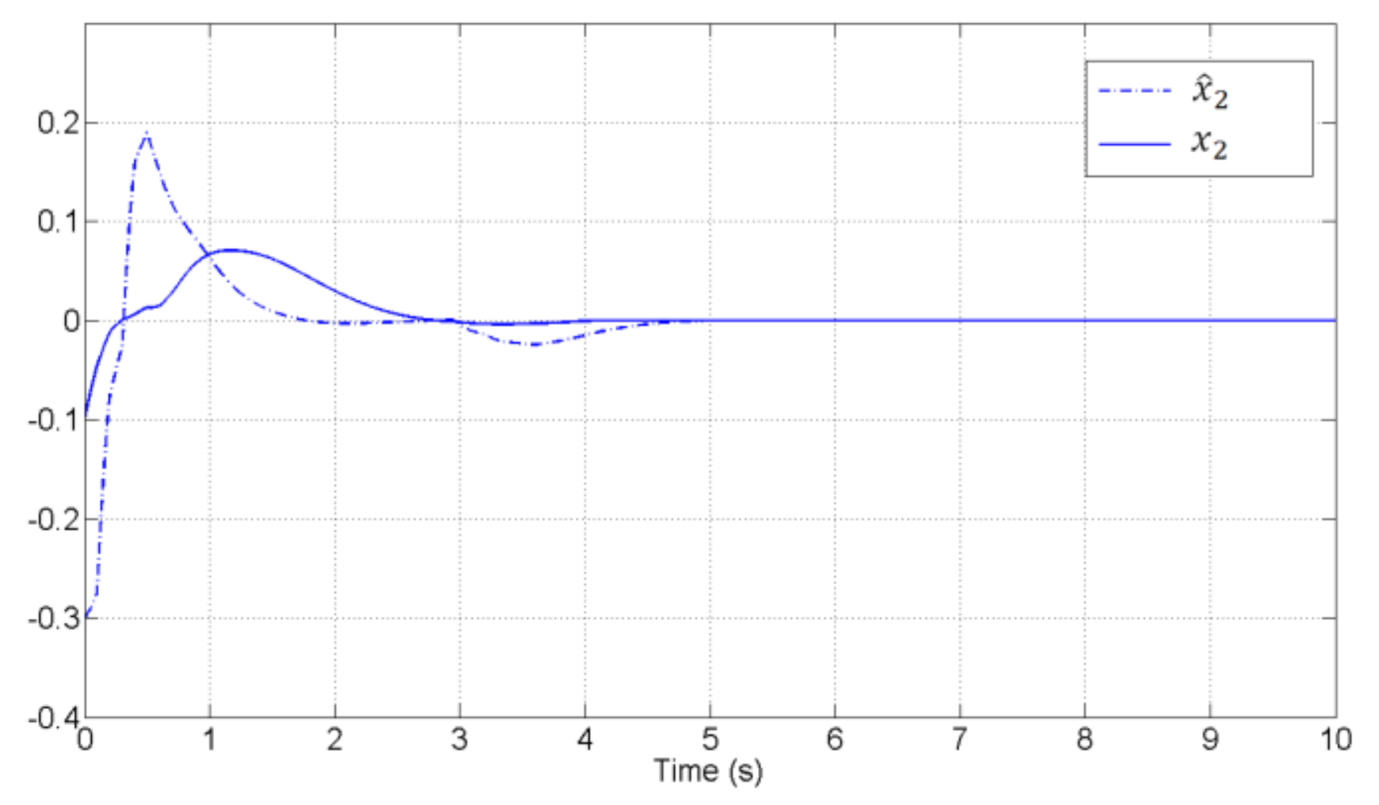
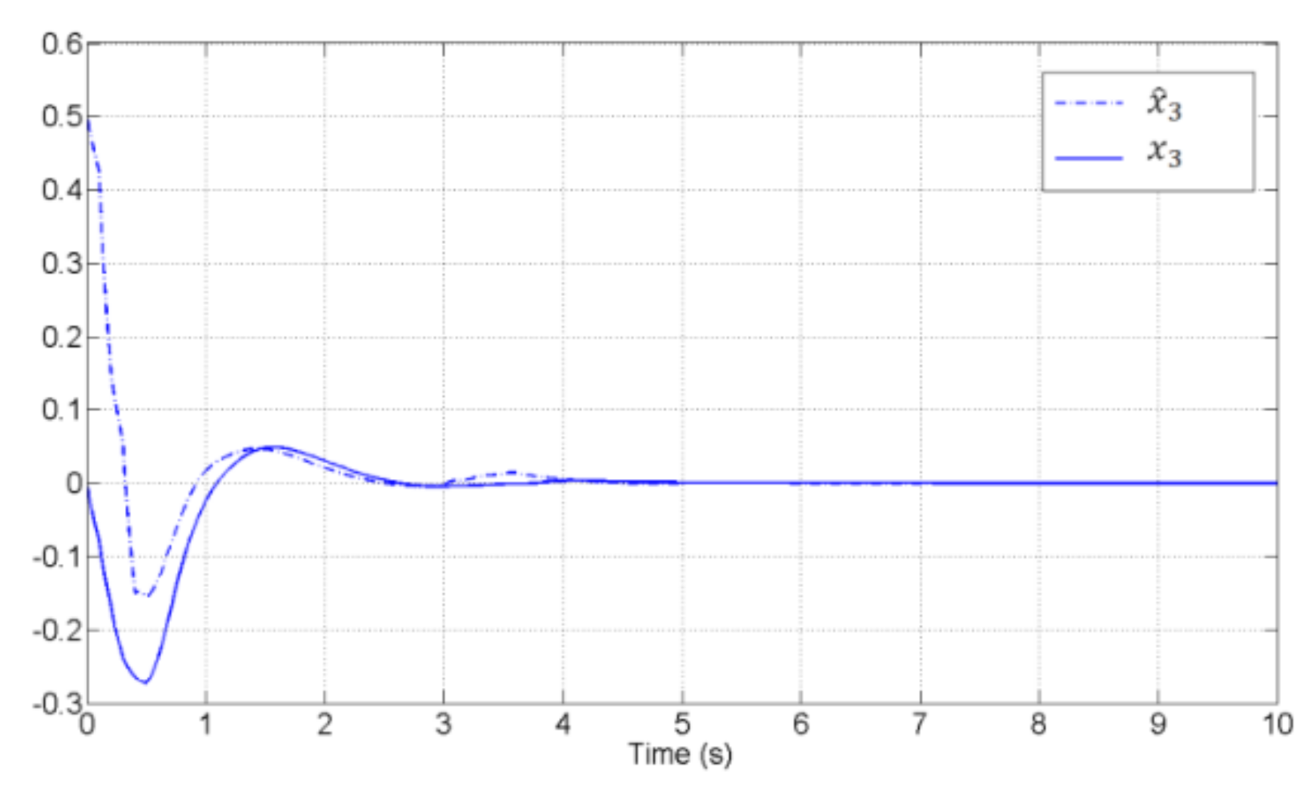
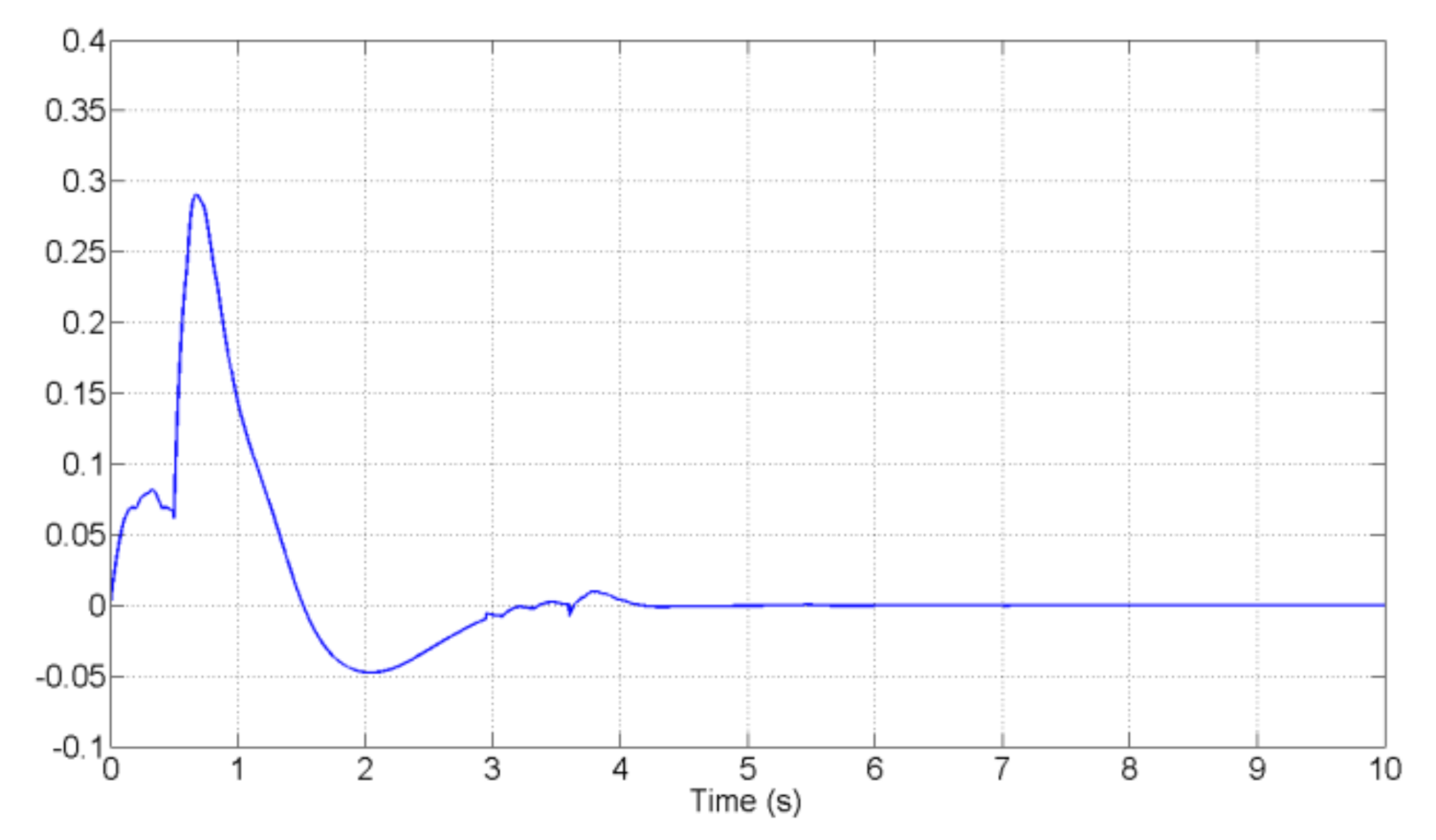
The state trajectories and state estimation trajectories of the USNS are shown in Figure 2, Figure 3 and Figure 4, with the initial conditions satisfying . It can be observed that system (3) is exponentially stable. Figure 5, Figure 6 and Figure 7 depict the output observer-based control trajectory, the observer output, and the estimated error of the system, respectively.
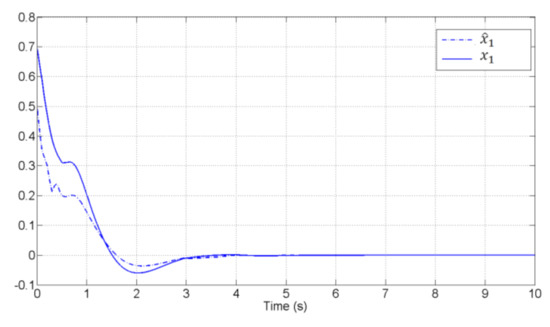
Figure 2.
State trajectory of and state estimation trajectory .
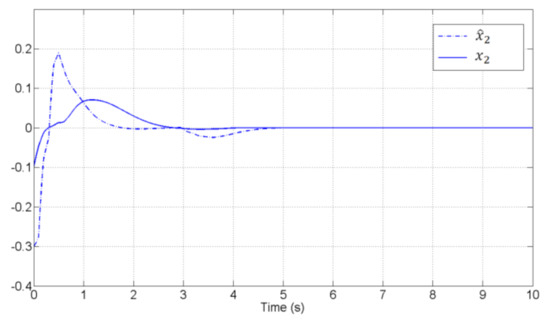
Figure 3.
State trajectory of and state estimation trajectory .
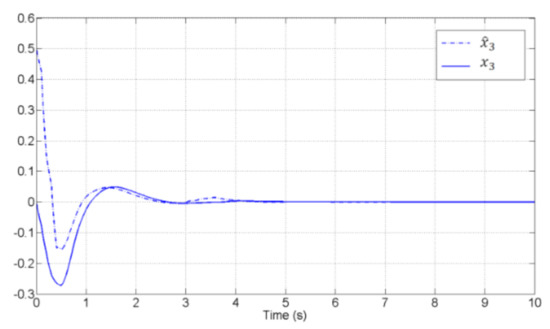
Figure 4.
State trajectory of and state estimation trajectory .
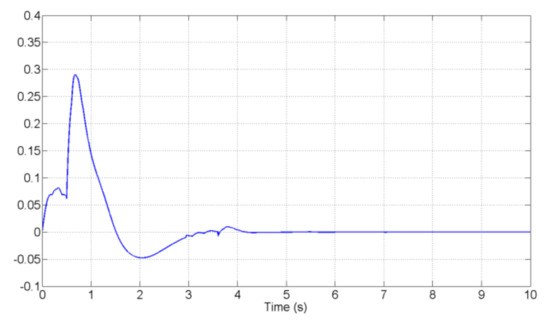
Figure 5.
Output observer-based control trajectory.
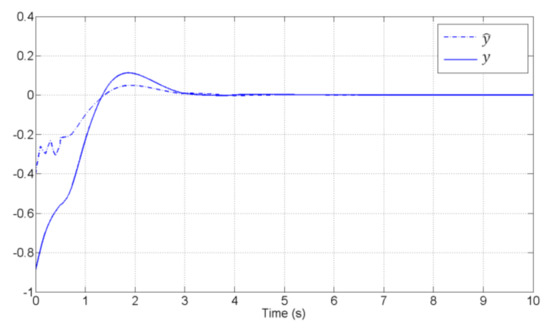
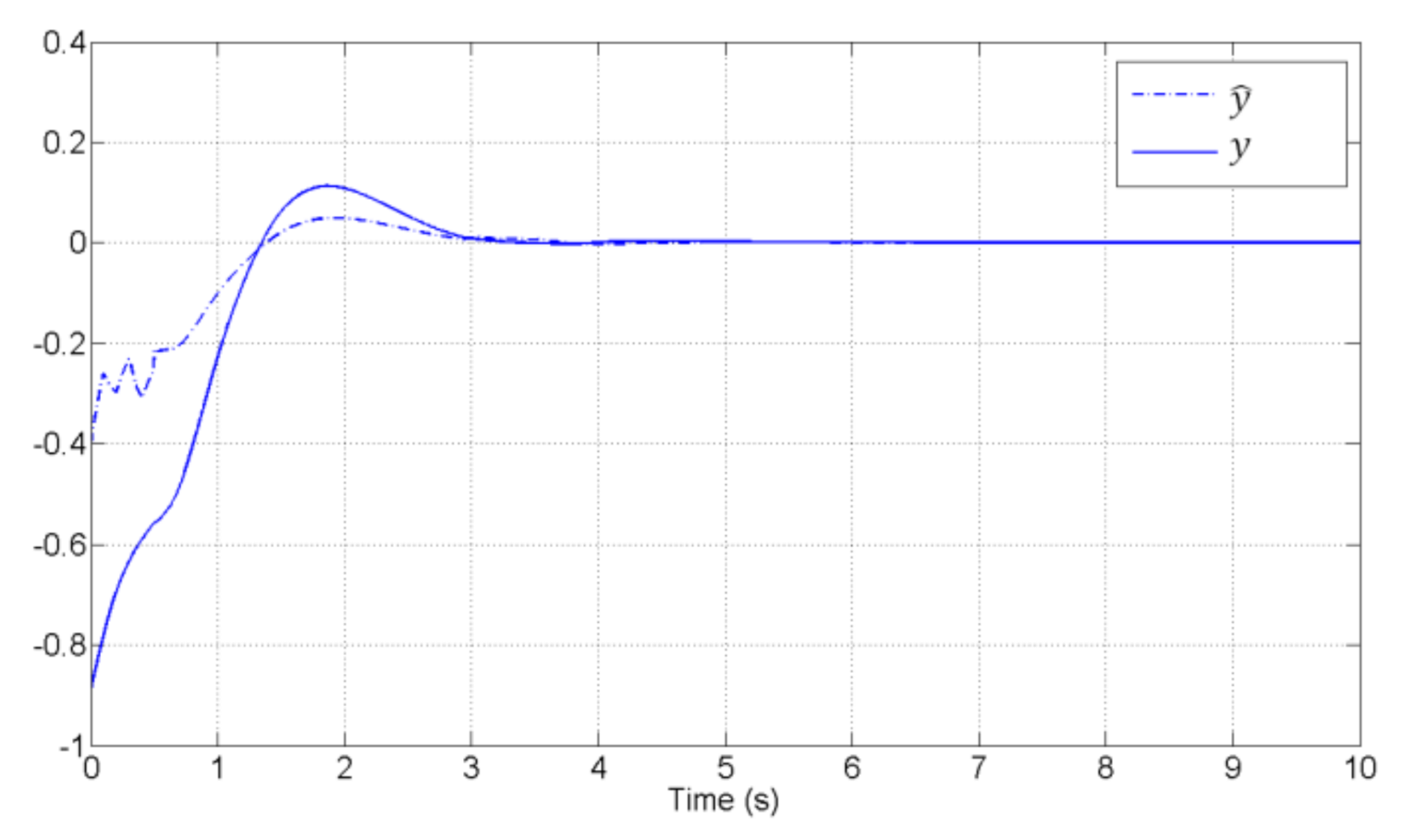
Figure 6.
Observer output () and measured output ( ).
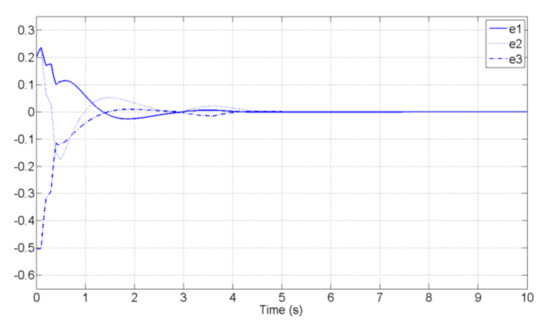
Figure 7.
The estimated error of the system.
As can be comprehend from Figure 2, Figure 3 and Figure 4 that the estimations for all states are reached to their actual values, which means that the estimation errors go to zero in an acceptable time. Furthermore, the control signal is completely feasible, and the observer signal tracks the actual output suitably. These points can be understood from Figure 5, Figure 6 and Figure 7.
Example 2.
The model of the water-quality dynamic of the River Nile considering two modes of operation are presented as follows [48,49]:
where
Defining the disturbance signal as , and , the values of and can be obtained as 0.2 and 0.5, respectively. Considering the control signal of a robust output observer-based approach in the form of (2), caused the system (3) to reach exponential stability. By quantifying (thus, ), an output observer-based controller is designed for USNS. The below matrices can be provided as the feasible solutions via solving (14)–(16):
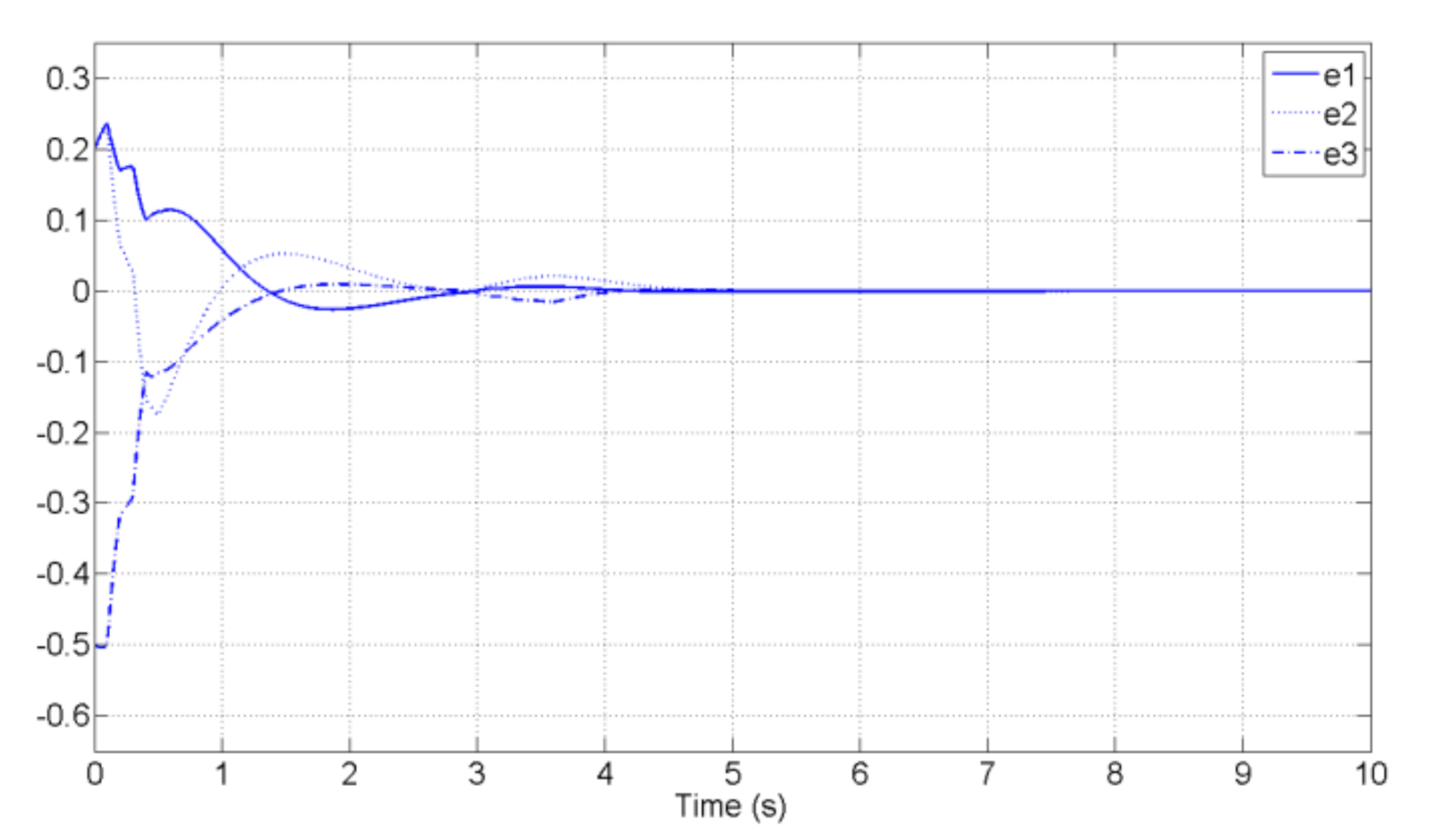
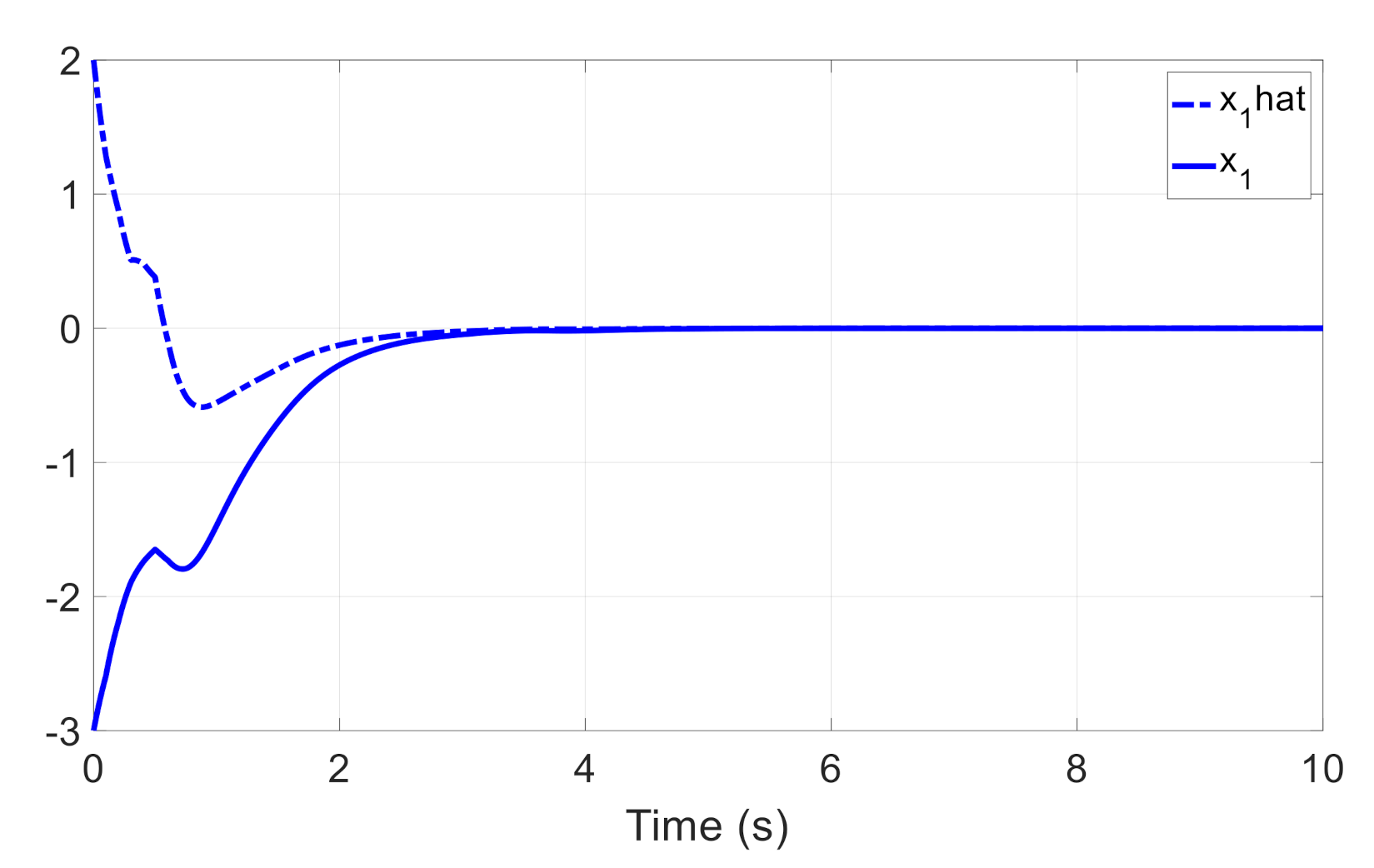
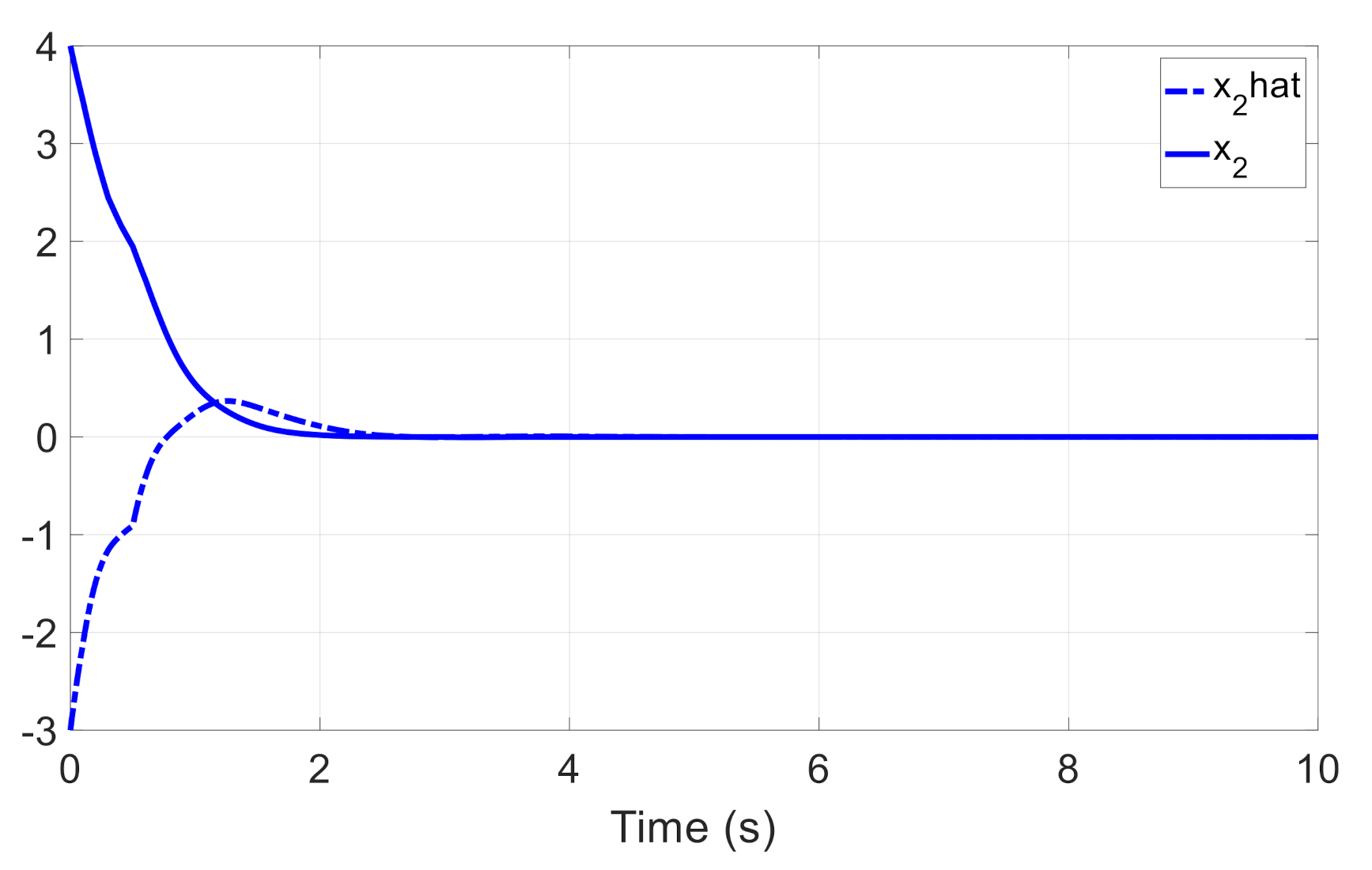
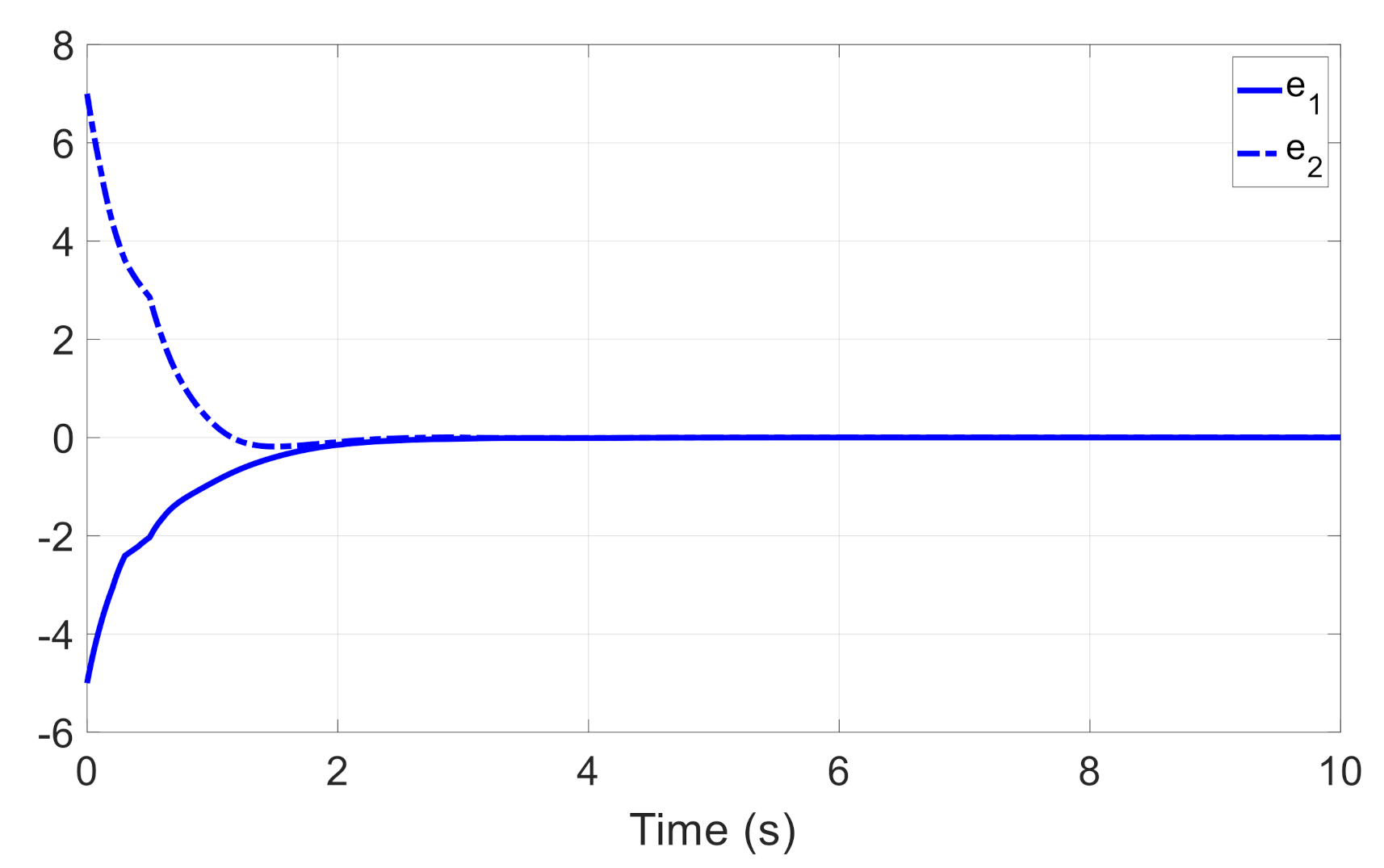
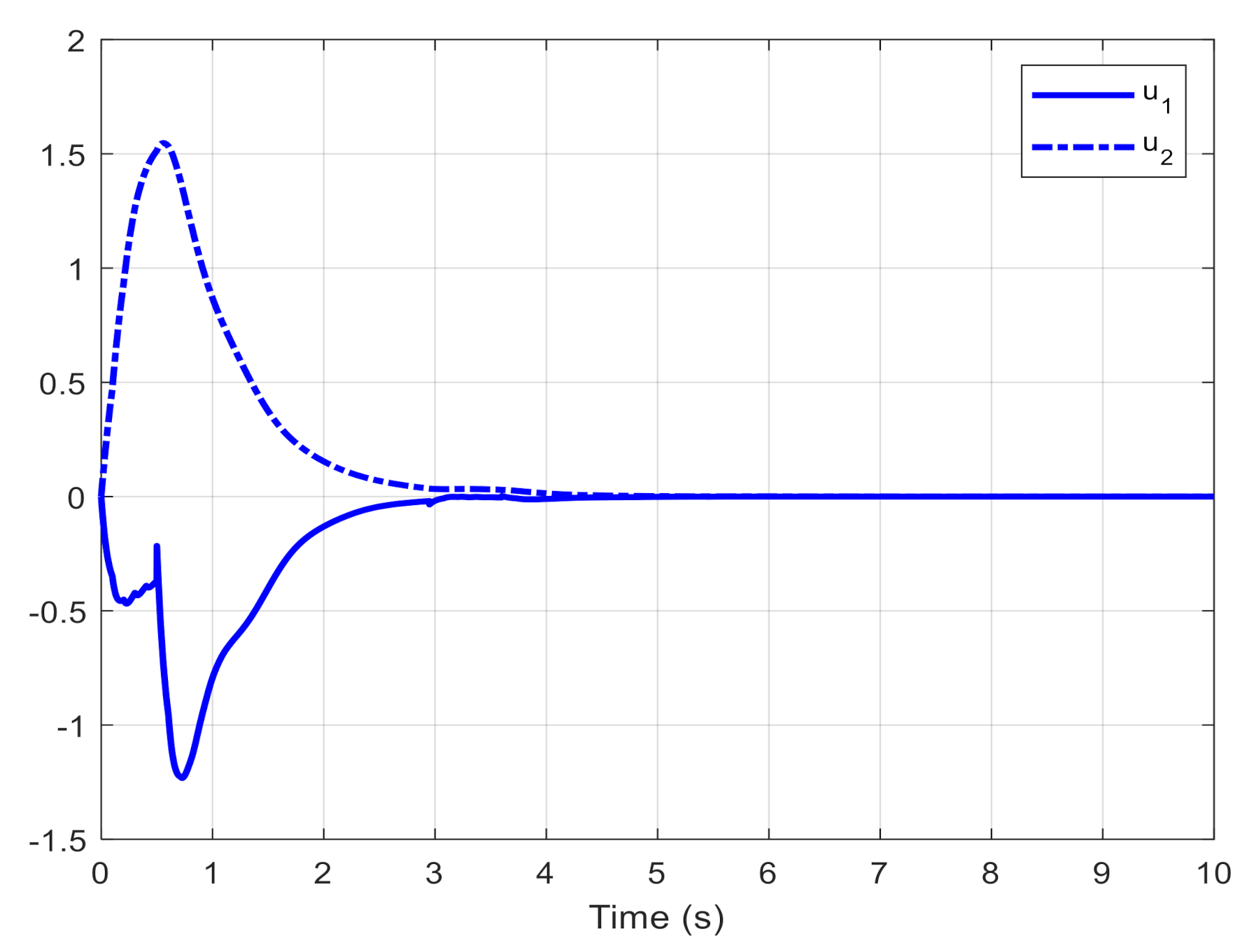
The trajectories of the states and their estimations for the USNS can be demonstrated in Figure 8 and Figure 9, by selecting the initial conditions as . As can be seen, System (3) is exponentially stable. Figure 10 and Figure 11 illustrate the estimated error and the output observer-based control trajectory, respectively. The appropriate performance of the designed system is demonstrated in Figure 3, in which the output estimated errors for both states reach zero in a short time.
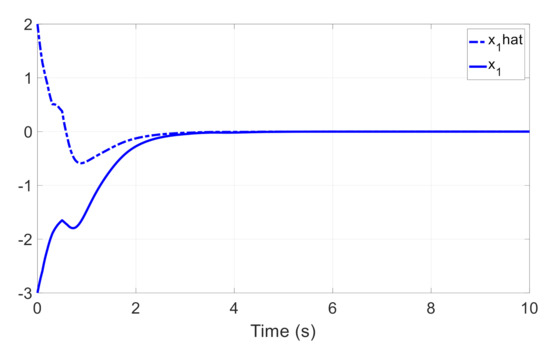
Figure 8.
State trajectory of and state estimation trajectory .
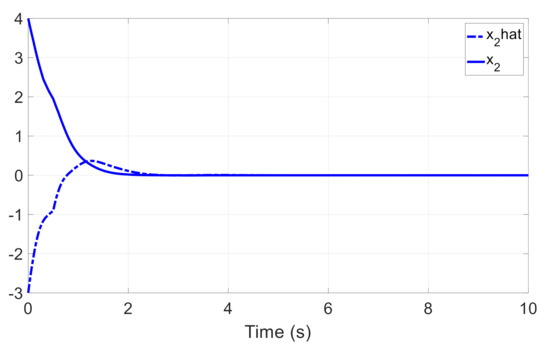
Figure 9.
State trajectory of and state estimation trajectory .
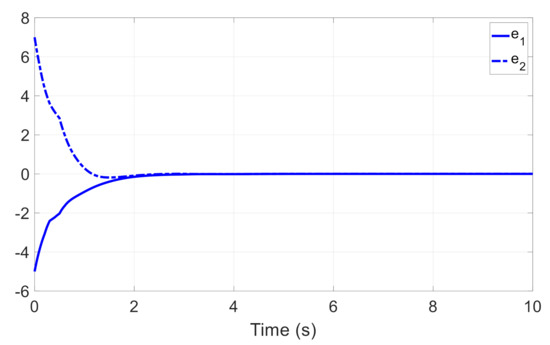
Figure 10.
The estimated error of the system.
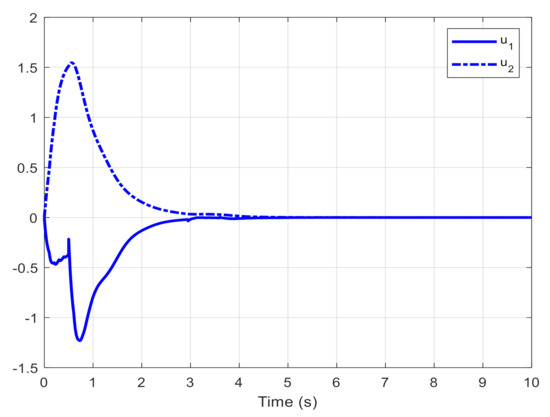
Figure 11.
Output observer-based control trajectories.
5. Conclusions
This paper investigated the problem of a robust observer-based control for USNSs with interval time-varying mixed delays. It considered the systems with norm-bounded time-varying uncertainties. By utilizing the average dwell time approach and the piecewise Lyapunov functional technique, the LMI-based feasibility conditions have been established to ensure that the considered system is exponentially stable with a prescribed level of performance. The observer gains are determined by solving a set of LMIs. The uncertainties in USNSs are solved by designing an output observer-based controller and employing the Yakubovich lemma. The proposed observer-based control is verified through two numerical simulations. The obtained results confirmed the effectiveness and robust performance of the proposed approach. It is worth noting that most previous studies have only dealt with the stabilization and control problem of USNSs without considering uncertainty and time-varying delays. However, the present work is more practically oriented because it considers parametric uncertainties and time-varying delays in the states and their derivatives. The extension of the proposed observer-based robust control technique for switched neutral systems with input saturation and multiple time-varying delays can be the topic of our future research. The subject of mixed H2/H∞ control for USNSs may be considered in future studies. Besides, by designing the Lyapunov function and employing the free weight matrices, the system conservation can be decreased in switched neutral systems along with uncertainty and nonlinear perturbation. In addition, designing a finite-time controller for the USNSs stabilization, considering the system constraints, and studying uncertain stochastic systems are the other issues for future works.
Author Contributions
Conceptualization, investigation, and writing—original draft preparation, H.G., H.K., S.M., and T.R.; writing—review and editing and supervision, J.H.A. and A.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available within the article.
Acknowledgments
This research is partially supported by Chiang Mai University. The authors would like to thank the respectable reviewers, associate editor, and editor-in-chief for their invaluable time in reviewing this paper.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Proof of Theorem 1.
A Lyapunov functional candidate is defined as follows:
where , , and () are to be determined. Taking the derivative of with respect to along the trajectory of the USNS (1), using (4) and (5), and adding (for the satisfaction of the exponential stability), yields:
Equation (A2) is rewritten as the following linear inequality by adding to (A2):
where
and
If one can prove that , which implies , the robust exponential stability and control of the system is guaranteed. According to the Schur complement lemma [50], Condition (A4) is equal to
Thus,
Now, if one can prove , which implies , the robust exponential stability and control of the system is guaranteed. Substituting , , , , , , , and into gives
where
On the other hand, noting (6) and (7), we will have
where and have been defined before (See (8)). Now, according to Lemma 1, if
Then, system (3) is exponentially stable. Hence, (A9) is rewritten as the following inequality:
Now, according to Lemma 1, if
the condition holds if and only if
It can be seen that (A12) is equivalent to (A10). Writing Equation (A12) in the matrix form, we will obtain the inequality (A13), which will guarantee the stability of the system.
and is defined above (see (A7)). Pre- and post-multiplying the matrix in (A13) by and , where
we will have
where
The Schur complement lemma is used for and . Furthermore, in view of Lemma 2 the conditions holds where .
By setting , , , , , , , , , , and , the matrix inequality (A14) is equivalent to (14). Assuming that Equation (14) is satisfied, by considering (A5), we will have
Integrating both sides of (A15) from to , the following inequality holds:
From (15) and (1.1), at the switching moment , we will have
Therefore, from (A16) and (A17), for , and according to Definition 2, we know , , then
Furthermore, given the definition of the Lyapunov function (A1) and its monotonousness, the following inequalities hold:
where and are defined in (17). Then, we will have
Now, we will establish the H∞ performance defined in (11) for the system in (3). Considering (A6), we have
Integrating (A21) from to , the following inequality holds:
Therefore, it follows from (A17) and (A22) and the inequality that
Under zero initial condition, (A23) implies
Multiplying both sides of (A24) by yields
Notice that and , we will have . Thus, (A25) implies
Integrating the above inequality from to yields (11). The proof is complete at this point. □
References
- Rojsiraphisal, T.; Niamsup, P.; Yimnet, S. Global uniform asymptotic stability criteria for linear uncertain switched positive time-varying delay systems with all unstable subsystems. Mathematics 2020, 8, 2118. [Google Scholar] [CrossRef]
- Ghous, I.; Lu, J. Robust observer design for two-dimensional discrete positive switched systems with delays. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3297–3301. [Google Scholar] [CrossRef]
- Modiri, A.; Mobayen, S. Adaptive terminal sliding mode control scheme for synchronization of fractional-order uncertain chaotic systems. ISA Trans. 2020, 105, 33–50. [Google Scholar] [CrossRef]
- Nie, R.; Ai, Q.; He, S.; Yan, Z.; Luan, X.; Liu, F. Robust finite-time control and estimation for uncertain time-delayed switched systems by observer-based sliding mode technique. Optim. Control. Appl. Methods 2020, 41, 1813–1830. [Google Scholar] [CrossRef]
- Zhou, P.; Zhang, L.; Zhang, S.; Alkhateeb, A.F. Observer-based adaptive fuzzy finite-time control design with prescribed performance for switched pure-feedback nonlinear systems. IEEE Access 2020, 9, 69481–69491. [Google Scholar] [CrossRef]
- Wang, Y.; Niu, B.; Wang, H.; Alotaibi, N.; Abozinadah, E. Neural network-based adaptive tracking control for switched nonlinear systems with prescribed performance: An average dwell time switching approach. Neurocomputing 2021, 435, 295–306. [Google Scholar] [CrossRef]
- Lin, C.-H.; Hu, G.-H.; Yan, J.-J. Estimation of synchronization errors between master and slave chaotic systems with matched/mismatched disturbances and input uncertainty. Mathematics 2021, 9, 176. [Google Scholar] [CrossRef]
- Shao, Y.; Levin, M.W.; Boyles, S.D.; Claudel, C.G. Semianalytical solutions to the Lighthill-Whitham-Richards Equation with time-switched triangular diagrams: Application to variable speed limit traffic control. IEEE Trans. Autom. Sci. Eng. 2020, 1–13. [Google Scholar] [CrossRef]
- Feng, T.; Wu, B.; Wang, Y.-E.; Chen, Y. Input-output finite-time stability of switched singular continuous-time Systems. Int. J. Control. Autom. Syst. 2021, 19, 1828–1835. [Google Scholar] [CrossRef]
- Li, Z.-M.; Chang, X.-H. Robust H∞ control for networked control systems with randomly occurring uncertainties: Observer-based case. ISA Trans. 2018, 83, 13–24. [Google Scholar] [CrossRef]
- El-Farra, N.H.; Mhaskar, P.; Christofides, P.D. Output feedback control of switched nonlinear systems using multiple Lyapunov functions. Syst. Control. Lett. 2005, 54, 1163–1182. [Google Scholar] [CrossRef]
- Li, X.; De Souza, C.E. Delay-dependent robust stability and stabilization of uncertain linear delay systems: A linear matrix inequality approach. IEEE Trans. Autom. Control. 1997, 42, 1144–1148. [Google Scholar] [CrossRef]
- Luecke, J.; Rahimi, M.J.; Zigler, B.T.; Grout, R.W. Experimental and numerical investigation of the Advanced Fuel Ignition Delay Analyzer (AFIDA) constant-volume combustion chamber as a research platform for fuel chemical kinetic mechanism validation. Fuel 2020, 265, 116929. [Google Scholar] [CrossRef]
- Rasoolinasab, S.; Mobayen, S.; Fekih, A.; Narayan, P.; Yao, Y. A composite feedback approach to stabilize nonholonomic systems with time varying time delays and nonlinear disturbances. ISA Trans. 2020, 101, 177–188. [Google Scholar] [CrossRef] [PubMed]
- Pujol-Vazquez, G.; Mobayen, S.; Acho, L. Robust control design to the furuta system under time delay measurement feedback and exogenous-based perturbation. Mathematics 2020, 8, 2131. [Google Scholar] [CrossRef]
- Tarafdar, A.; Mondal, A.J.; Bera, U.K.; Bhattacharyya, B. A PVT aware differential delay circuit and its performance variation due to power supply noise. Integration 2021, 76, 159–171. [Google Scholar] [CrossRef]
- Yaseen, M.H. A comparative study of stabilizing control of a planer electromagnetic levitation using PID and LQR controllers. Results Phys. 2017, 7, 4379–4387. [Google Scholar] [CrossRef]
- Janwised, J.; Wongsaijai, B.; Mouktonglang, T.; Poochinapan, K. A modified three-level average linear-implicit finite difference method for the Rosenau-Burgers equation. Adv. Math. Phys. 2014, 2014. [Google Scholar] [CrossRef]
- Mobayen, S.; Bayat, F.; Omidvar, H.; Fekih, A. Robust global controller design for discrete-time descriptor systems with multiple time-varying delays. Int. J. Robust Nonlinear Control. 2020, 30, 2809–2831. [Google Scholar] [CrossRef]
- Liu, H.; Shen, Y.; Zhao, X. Delay-dependent observer-based H∞ finite-time control for switched systems with time-varying delay. Nonlinear Anal. Hybrid Syst. 2012, 6, 885–898. [Google Scholar] [CrossRef]
- Liu, D.; Zhong, S.; Liu, X.; Huang, Y. Stability analysis for uncertain switched neutral systems with discrete time-varying delay: A delay-dependent method. Math. Comput. Simul. 2009, 80, 436–448. [Google Scholar] [CrossRef]
- Zhang, D.; Yu, L. Exponential stability analysis for neutral switched systems with interval time-varying mixed delays and nonlinear perturbations. Nonlinear Anal. Hybrid Syst. 2012, 6, 775–786. [Google Scholar] [CrossRef]
- Rahmanipour, P.; Ghadiri, H. Stability analysis for a class of fractional-order nonlinear systems with time-varying delays. Soft Comput. 2020, 24, 17445–17453. [Google Scholar] [CrossRef]
- Ghadiri, H.; Jahed-Motlagh, M.R.; Yazdi, M.B. Robust output observer-based guaranteed cost control of a class of uncertain switched neutral systems with interval time-varying mixed delays. Int. J. Control. Autom. Syst. 2014, 12, 1167–1179. [Google Scholar] [CrossRef]
- Ali, M.S.; Saravanan, S. Robust finite-time H∞ control for a class of uncertain switched neural networks of neutral-type with distributed time varying delays. Neurocomputing 2016, 177, 454–468. [Google Scholar] [CrossRef]
- Ghadiri, H.; Jahed-Motlagh, M.R. LMI-based criterion for the robust guaranteed cost control of uncertain switched neutral systems with time-varying mixed delays and nonlinear perturbations by dynamic output feedback. Complexity 2016, 21, 555–578. [Google Scholar] [CrossRef]
- Mahmoud, E.E.; Jahanzaib, L.S.; Trikha, P.; Abualnaja, K.M. Analysis and control of a fractional chaotic tumour growth and decay model. Results Phys. 2021, 20, 103677. [Google Scholar] [CrossRef]
- Wongsaijai, B.; Charoensawan, P.; Chaobankoh, T.; Poochinapan, K. Advance in compact structure-preserving manner to the Rosenau–Kawahara model of shallow-water wave. Math. Methods Appl. Sci. 2021, 44, 7048–7064. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Wong, W.-K. Adaptive terminal sliding mode control for attitude and position tracking control of quadrotor UAVs in the existence of external disturbance. IEEE Access 2020, 9, 3428–3440. [Google Scholar] [CrossRef]
- Chang, X.-H. Robust Output Feedback H-Infinity Control and Filtering for Uncertain Linear Systems; Springer Science & Business: Berlin/Heidelberg, Germany, 2014; Volume 7. [Google Scholar]
- Sakthivel, R.; Joby, M.; Wang, C.; Kaviarasan, B. Finite-time fault-tolerant control of neutral systems against actuator saturation and nonlinear actuator faults. Appl. Math. Comput. 2018, 332, 425–436. [Google Scholar] [CrossRef]
- Sakthivel, R.; Karthick, S.; Kaviarasan, B.; Lim, Y. Reliable state estimation of switched neutral system with nonlinear actuator faults via sampled-data control. Appl. Math. Comput. 2017, 311, 129–147. [Google Scholar] [CrossRef]
- Liu, D.; Liu, X.; Zhong, S. Delay-dependent robust stability and control synthesis for uncertain switched neutral systems with mixed delays. Appl. Math. Comput. 2008, 202, 828–839. [Google Scholar] [CrossRef]
- Lien, C.-H.; Yu, K.-W.; Chung, Y.-J.; Lin, Y.-F.; Chung, L.-Y.; Chen, J.-D. Exponential stability analysis for uncertain switched neutral systems with interval-time-varying state delay. Nonlinear Anal. Hybrid Syst. 2009, 3, 334–342. [Google Scholar] [CrossRef]
- Ghadiri, H.; Emami, M.; Khodadadi, H. Adaptive super-twisting non-singular terminal sliding mode control for tracking of quadrotor with bounded disturbances. Aerosp. Sci. Technol. 2021, 112, 106616. [Google Scholar] [CrossRef]
- Kim, J.H.; Yoo, S.J. Nonlinear-observer-based design approach for adaptive event-driven tracking of uncertain underactuated underwater vehicles. Mathematics 2021, 9, 1144. [Google Scholar] [CrossRef]
- Xie, D.; Chen, X. Observer-based switched control design for switched linear systems with time delay in detection of switching signal. Control. Theory Appl. IET 2008, 2, 437–445. [Google Scholar] [CrossRef]
- Liu, X.; Yuan, S. On designing H∞ fault estimator for switched nonlinear systems of neutral type. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 4379–4389. [Google Scholar] [CrossRef]
- Qing-Kui, L.; Dimirovski, G.M.; Jun, Z. Observer based tracking control for switched linear systems with time-delay. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1570–1575. [Google Scholar]
- Li, T.-F.; Fu, J. Event-triggered sampling and control of switched delay systems. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 2296–2300. [Google Scholar]
- Li, T.-F.; Fu, J. Observer-based dynamic output event-triggered control of switched systems. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26-28 July 2017; pp. 2321–2325. [Google Scholar]
- Li, T.-F.; Fu, J.; Deng, F.; Chai, T. Stabilization of switched linear neutral systems: An event-triggered sampling control scheme. IEEE Trans. Autom. Control. 2018, 63, 3537–3544. [Google Scholar] [CrossRef]
- Luo, X.; Wang, X.; Li, T.-F. Feedback control of switched linear systems with event-triggered link. In Proceedings of the 2019 IEEE 8th Data Driven Control and Learning Systems Conference (DDCLS), Dali, China, 24–27 May 2019; pp. 158–162. [Google Scholar]
- Hespanha, J.P.; Morse, A.S. Stability of switched systems with average dwell-time. In Proceedings of the 38th IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; pp. 2655–2660. [Google Scholar]
- Xiang, Z.; Sun, Y.-N.; Mahmoud, M.S. Robust finite-time H∞ control for a class of uncertain switched neutral systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1766–1778. [Google Scholar] [CrossRef]
- Yakubovich, V.A. S-Procedure in Nonlinear Control Theory. Vestnik Leningrad Univ. Math. 1997, 4, 73–93. [Google Scholar]
- Ho, D.W.C.; Lu, G. Robust stabilization for a class of discrete-time non-linear systems via output feedback: The unified LMI approach. Int. J. Control. 2003, 76, 105–115. [Google Scholar] [CrossRef]
- Apkarian, P. Continuous-time analysis and H_2 multi-channel synthesis with enhanced LMI characterizations. IEEE Trans. Automat. Contr. 2001, 46, 1941–1946. [Google Scholar] [CrossRef]
- El Ghaoui, L.; Oustry, F.; AitRami, M. A cone complementarity linearization algorithm for static output-feedback and related problems. IEEE Trans. Autom. Control. 1997, 42, 1171–1176. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1994. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).