1. Introduction
Much multivariate data is being collected by monitoring natural and social processes. IBM estimates that we all generate 175 zettabytes of data every day. To add, the data were collected at a rapidly increasing rate, i.e., it is estimated that 90% of data has been generated in the last two years. The need to extract useful information from continuously generated data sets drives demand for data specialists and the development of robust analysis methods.
Data analytics is inconceivable without testing the goodness of fit hypothesis. The primary task of a data analyst is to become familiar with the data sets received. This usually starts by identifying the distribution of the data. Then, the assumption that the data follow a normal distribution is usually tested. Since 1990, many tests have been developed to test this assumption, mostly for univariate data.
It is important to use the powerful tests for the goodness of fit hypothesis to test the assumption of normality because an alternative distribution is not known in general. Based on the outcome of normality verification, one can choose suitable analysis methods (parametric or non-parametric) for further investigation. From the end of the 20th century to the present day, multivariate tests for testing the goodness of fit hypothesis have been developed by a number of authors [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14]. Some of the most popular and commonly used multivariate tests are Chi-Square [
8], Cramer von Mises [
2], Anderson-Darling [
2], and Royston [
3].
Checking the assumption of normality of multivariate data is more complex compared to univariate. Additional data processing is required (e.g., standardization). The development of multivariate tests is more complex because they require checking the properties of invariance and contingency. While for the univariate tests, the invariance property is always satisfied. The properties of invariance, contingency are presented in
Section 2 and are discussed in more detail in [
2,
12,
15].
The study aims to perform a power analysis of the multivariate goodness of fit hypothesis tests for the assumption of normality, to find out proposed test performances compared to other well-known tests and to apply the multivariate tests to the real data. The power estimation procedure is discussed in [
16].
Scientific novelty. The power analysis of multivariate goodness of fit hypothesis testing for different data sets was performed. The goodness of fit tests were selected as representatives of popular techniques, which had been analyzed by other researchers experimentally. In addition, we proposed a new multivariate test based on the mean absolute deviation of the empirical distribution density from the theoretical distribution density. In this test, the density estimate is derived by using an inversion formula which is presented in
Section 3.
The rest of the paper is organized as follows.
Section 2 defines the tests for the comparative multivariate test power study.
Section 3 presents details of our proposed test.
Section 4 presents the data distributions used for experimental test power evaluation.
Section 5 presents and discusses the results of simulation modeling.
Section 6 discusses the application of multivariate goodness of fit hypothesis tests to real data. Finally, the conclusions and recommendations are given in
Section 7.
2. Multivariate Tests for Normality
We denote the
p-variate normal distribution as
, where
is an expectation vector
and
is the nonsingular covariance matrix.
indicates a set of all possible
p-variate normal distributions. Let
where
and
, be a finite sample generated by a random
p-variate (column) vector
with distribution function
. The mean vector
is given by
where
is the sample size and the sample covariate matrix is
To assess multivariate normality of
(based on the observed sample
) a lot of statistical tests have been developed. Before reviewing specific tests, selected for this study, let us consider two essential properties. The set
is closed with respect to affine transformations, i.e.,
for any translation vector
and any nonsingular matrix
Thus, a reasonable statistic
for checking the null hypothesis (
) of multivariate normality should have the same value for a sample and its affine transforms, that is
An invariant test has a statistic, which satisfies the condition (1). It might seem that a test based on a standardized sample
is invariant, however Henze and Zirkler [
2] note that this is not always the case. In practice, for a given sample
the alternative distribution is not know. In such a case it is important to use a test for which the probability of correctly rejecting
tends to one as
. Such a test is said to be consistent. For more elaborate discussion on these properties we refer the reader to [
2]. Other important denotes are given in
Appendix A.
2.1. Tests Based on Squared Radii
This section reviews the properties of several measures of squared radii concerning their use for assessing multivariate normality. Squared radii are defined as
have a distribution which, under normality, is
times a
distribution [
9]. Under
, the distribution of
is approximately
for large
.
2.1.1. Chi-Squared (CHI2)
In 1981, Moore and Stubblebine presented multivariate Chi-Squared goodness of fit test based on order statistics [
8]. The statistic of the test is defined as
where
Since
takes the equivalent form [
8]:
where
is the probability distribution function of
.
.
2.1.2. Cramer-Von Mises (CVM)
In 1982, Koziol proposed the use of Cramer-von Mises-type multivariate goodness of fit test based on order statistics [
2]. This test statistic is defined as
where
is order statistics.
2.1.3. Anderson-Darling (AD)
In 1987, Paulson, Roohan and Sullo proposed the Anderson-Darling type multivariate goodness of fit test based on order statistics [
2]. The test statistic is defined as
2.2. Tests Based on Skewness and Kurtosis
This section reviews the properties of several measures of multivariate skewness and kurtosis regarding their use as statistics for assessing multivariate normality [
2]. The skewness and kurtosis are defined as
where
.
2.2.1. Doornik-Hansen (DH)
In 2008, Doornik-Hansen proposed a new multivariate goodness of fit test based on the skewness and kurtosis of multivariate data transformed to ensure independence [
6]. The Doornik-Hansen test statistic is defined as the sum of squared transformations of the skewness and kurtosis. Approximately, the test statistic follows a
distribution
where
and
are defined as
where
2.2.2. Royston (Roy)
In 1982, Royston proposed a test that uses the
Shapiro-Wilk/
Shapiro-Francia statistic to test multivariate normality. If the kurtosis of the sample is greater than 3, then it uses the
Shapiro-Francia test for leptokurtic distributions. Otherwise it uses the
Shapiro-Wilk test for platykurtic distributions [
3,
5]. Let
be the
Shapiro-Wilk/
Shapiro-Francia test statistic for the
th variable (
) and
be the values obtained from the normality transformation [
3,
5].
Thus, it are observed that
and
change with the sample size. The transformed values of each random variable are obtained by [
3,
5]
where
,
and
are derived from the polynomial approximations. The polynomial coefficients are provided for different [
3,
5]:
The Royston’s test statistic for multivariate normality is defined as
where
is the equivalent degrees of freedom,
is the cumulative distribution function for the standard normal distribution such that,
Let
be the correlation matrix and
is the correlation between
th and
th observations. Then, the extra term
is found by
where
When
and
, then
can be defined as
where
,
and
are the unknown parameters, which are estimated by Ross modeling [
4]. It was found that
and
for sample size
and
is a cubic function
2.2.3. Mardia (Mar1 and Mar2)
In 1970, K.V. Mardia proposed a new multivariate goodness of fit test based on skewness and kurtosis. The statistic for this test is defined as [
17]
2.3. Other Tests
This section reviews the properties of several measures of non-negative functional distance, a covariance matrix and Energy distance concerning their use as statistics for assessing multivariate normality. A non-negative functional distance that measures the distance between two functions is defined as
where
is the characteristic function of the multivariate standard normal,
is the empirical characteristic function of the standardised observations,
is a kernel (weighting) function
where
and
is a smoothing parameter that needs to be selected [
10].
2.3.1. Energy (Energy)
In 2013, G. Szekely and M. Rizzo introduced a new multivariate goodness of fit test based on Energy distance between multivariate distributions. The statistic for this test is defined as [
18]
where
,
is called scattering residues.
and
are independent randomly distributed vectors according to the normal distribution.
, where
is a Gamma function. The null hypothesis is rejected when
acquires large values.
2.3.2. Lobato-Velasco (LV)
In 2004, I. Lobato and C. Velasco improved the Jarque and Bera test and applied it to stationary processes. The statistic for this test is defined as [
19]
where
is an auto-covariance function.
2.3.3. Henze-Zirkler (HZ)
In 1990, Henze and Zirkler introduced the HZ test [
1]. The statistic for this test is defined as
where
,
.
gives the squared Mahalanobis distance of
th observation to the centroid and
gives the Mahalanobis distance between
th and
th observations. If the sample follows a multivariate normal distribution, the test statistic is approximately log-normally distributed with mean [
1]
and variance [
1]
where
and
Henze and Zirkler also proposed an optimal choice of the parameter
in using
in the
p-variate case as [
1]
A drawback of the Henze-Zirkler test is that, when
is rejected, the possible violation of normality is generally not straightforward. Thus, many biomedical researchers would prefer a more informative and equally or more powerful test than the Henze-Zirkler test [
5].
2.3.4. Nikulin-Rao-Robson (NRR) and Dzhaparidze-Nikulin (DN)
In 1981, Moore and Stubblebine suggested a multivariate Nikulin-Rao-Robson (NRR) goodness of fit test [
7,
8]. This test statistic for a covariance matrix of any dimension is defined as
where
is a vector of standardized cell frequencies with components
where
is the number of random vectors
falling into
. Then the limiting covariance matrix of standardized frequencies is
, where
is the
matrix with elements
where
is a
r-vector with its entries as
, 𝕞
is the number of unknown parameters,
is the Fisher information matrix of size
for one observation which evaluated as
where
is the
covariance matrix of
(a vector of the entries of
arranged column-wise by taking the upper triangular elements) [
7]:
The second term of
recovers information lost due to data grouping. Another useful decomposition of
is defined as
where
is the multivariate statistic defined by Dzhaparidze and Nikulin (1974) [
7]. It is defined as
and in 1985, McCulloch presented a multivariate test statistic [
7]:
If rank , then and are asymptotically independent and distributed in the limit as and , respectively.
3. The New Test
Our test is based on distribution distance and has been derived using an inversion formula. The estimation of a sample distribution density is based on application of the characteristic function and inversion formula. This method is known for its good properties (i.e., low sensitivity) and has been introduced in [
20]. Marron and Wand [
21] carried out an extensive comparison of density estimation methods (including the adapted kernel method) and concluded that density estimation based on application of characteristic function and inversion is more accurate for non-Gaussian data sets.
The random
-variate vector
, which follows a distribution of a mixture model has a density function
where
is the number of clusters (i.e., components, classes) of the mixture, and
is the a priori probability which satisfy
The is a distribution of the th class and is a set of parameters . We denote the -variate sample of independent and identically distributed random values .
When examining approximations of parametric methods, it should be emphasized that as the data dimension increases, the number of model parameters increases rapidly, making it more difficult to find accurate parameter estimates. It is much easier to find density of univariate data projections
than multivariate data density
because of mutually unambiguous compliance.
It is quite natural to try to find the multivariate density
using the density estimates
of univariate observational projections [
20]. In case of Gaussian mixture model, the projection of the observations (15) is also distributed according to the Gaussian mixture model:
where
is univariate Gaussian density. The parameter set
θ of the multivariate mixture and the distribution parameters of the data projections
,
are related by equations:
The inversion formula is used
where
where
denotes the characteristic function of the random variable
. Given that
,
and by changing the variables to a spherical coordinate system we obtain
where the first integral is the surface integral of the unit sphere. The characteristic function of the projection of the observed random variable is
and has the property
By selecting the set
of uniform distributed directions on the sphere and replacing the characteristic function with its estimate, a density estimate is obtained [
20,
22]:
where
denotes a size of set
. Using the
p-variate ball volume formula
the constant
defined as
Computer simulation studies have shown that the density estimates obtained using the inversion formula are not smooth. Therefore, in Formula (24), an additional multiplier
is used. This multiplier smoothes the estimate
with the Gaussian kernel function. Moreover, this form of the multiplier allows the integral value to be calculated analytically. Monte Carlo studies have shown that its use significantly reduces the error of estimates. Formula (24) can be used to estimate the characteristic function of the projected data. Let us consider two approaches. The first one is based on the density approximation of the Gaussian distribution mixture model. In this case, the parametric estimate of the characteristic function is used:
By substituting
in (24) by (27), we get
where
We note, that only the real part of the expression is considered here (the sum of the imaginary parts must be equal to zero) in other words, the density estimate can acquire only the real values. The chosen form of the smoothing multiplier allows relating the smoothing parameter with the variances of the projection clusters, i.e., in the calculations the variances are simply increased by . Next, the expression (29) is evaluated.
Let
then (29) can be written as
By integrating in parts, we get
is expressed analogously. With respect to the limitations of the
j index, the following recursive equations are obtained:
The initial function
is founded by starting with the relation
From (35) and (38) it follows that
satisfies the differential equation
which is solved by writing down
as the Taylor series:
By equating the coefficients of the same powers, its values are obtained:
which gives us
is found from expression (30):
The value of the integral (24) then is
One of the disadvantages of the inversion formula method (defined by (24)) is that the Gaussian distribution mixture model (13) described by this estimate (for ) does not represent density accuratelly, except around observations. When approximating the density under study with a mixture of Gaussian distributions, the estimation of the density using the inversion formula often becomes complicated due to a large number of components. Thus, we merge components with small a priori probabilities into one noise cluster.
We have developed and examined a modification of the algorithm which is based on the use of a multivariate Gaussian distribution mixture model. The parametric estimate of the characteristic function of uniform distribution density is defined as
in the inversion Formula (19). In the density estimate calculation Formula (24), the estimation of the characteristic function is constructed as a union of the characteristic functions of a mixture of Gaussian distributions and uniform distribution with corresponding a priori probabilities:
where the second member describes uniformly distributed noise cluster,
—noise cluster weight,
,
. Based on the established estimates of the parameters of the uniform distribution and data projections, it is possible to define the range
By inserting (46) to (24) we obtain
Using notations such as (28), we define the density estimate as
where
is given in (29) which is evaluated by (44) and
By integrating, we get
where
and
are defined in (30) and (31). Then the integral (51) evaluates to
The above procedure is called
a modified inversion formula density estimate. Our proposed normality test is based on the distance function
where
is a standardized value,
is an estimate of density function.
The choice of
G(z) (54) is influenced by three aspects [
23]:
G(z) assigns high weight where |f(z)−| is large, f(z) pertaining to the alterative hypothesis. the distribution density is related to the alternative hypothesis.
G(z) gives high weight where the is a relatively precise estimator of f(z).
G(z) is such that the integral (54) has a closed form.
For the
distribution free method, the first two aspects are fulfilled by adequately selecting the smoothness parameter
, in addition it yields a closed (54) integral form
does not depend on a moderate sample volume (
32) but depends on the data dimension. It is convenient to use the test statistics
which had the lowest sensitivity based on the exploratory study. Under the null hypothesis statistic
approximately follows the Johnson S
U distribution which is specified by the shape (
), scale (
), location (
) parameters and has the density function
where
,
.
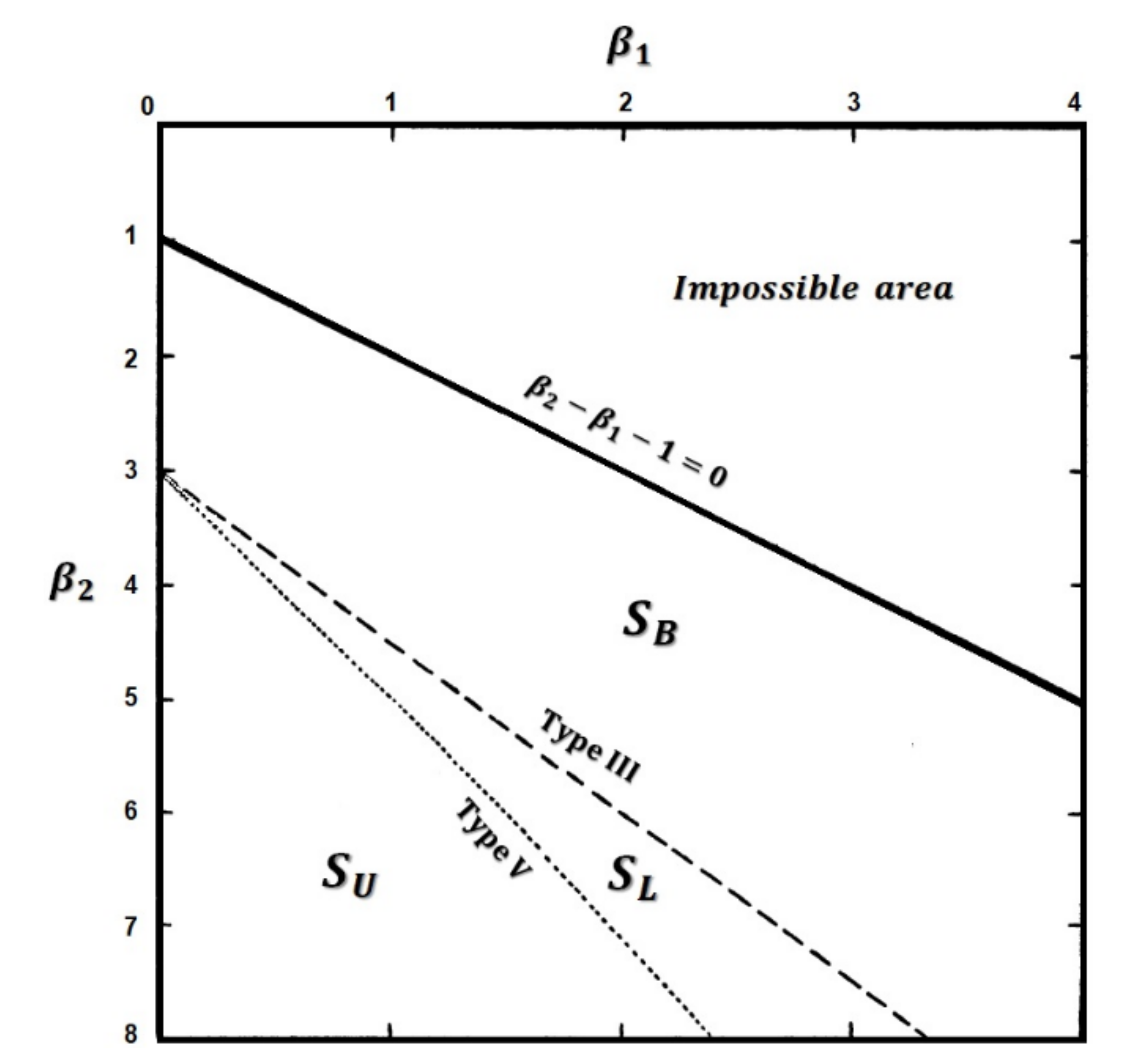
In the middle of the twentieth century, N. L. Johnson [
24] proposed certain systems of curve derived by the method of translation, which, retain most of the advantages and eliminate some of the drawbacks of the systems first based on this method. Johnson introduced log-normal (S
L), bounded (S
B), and unbounded (S
U) systems. The bounded system range of variation covers the area between the bounding line
and the Pearson Type III distribution; where (
,
) points are obtained from the distribution moments defined by Wicksell [
25]:
The S
U system is bounded at one end only (Pearson Type V). The S
L system is lying between S
B and S
U systems. These regions are indicated in
Figure 1. The S
U system is presented in detail in [
24].
Estimates of
statistic Johnson S
U distribution parameters for different dimensions are given in
Table 1.
For statistic
, the invariance and contingency properties were checked. The invariance property is confirmed because standardized data was used. The contingency property is confirmed experimentally (see
Section 5).
5. Simulation Study and Discussion
This section provides a modeling study that evaluates the power of selected multivariate normality tests. We used the Monte Carlo method to compare our proposed test with 13 multivariate tests described above for dimensions , with sample sizes at significance level . Power was estimated by applying the tests on 1 000 000 randomly drawn samples from the alternative distribution (Beta, Cauchy, Laplace, Logistic, Student, Standard normal, Chi-Square, Gamma, Gumbel, Lognormal, Weibull, Mixed, Normal mixture).
The values of the test smoothness parameter () were selected experimentally: from 0.1 to 5 with a step of 0.1. The value of the test parameter was determined for each dimension considered. It was found that the best results are obtained (i.e., maximum statistical value) for with , for with , and for with . These smoothness parameter values were used to carry out the numerical experiments.
The power of 13 (including our proposed test) multivariate goodness of fit hypothesis tests was estimated calculated for different sample sizes, distributions and mixtures. The mean power values for the groups for distributions (given in
Section 4), for each test and sample sizes, have been computed and presented in
Table 2,
Table 3,
Table 4 and
Table 5. It can be determined that the new test for the groups of symmetric and mixed distributions is the most powerful one. In the group of asymmetric distributions, the new (for
) and Roy (for
and
) tests are the most powerful ones. The new (for
and
) and Roy (for
with sample sizes
) tests are also the most powerful in the group of normal distribution mixtures. Comparing the Mardia (Mar1 and Mar2) tests, based on asymmetry and excess coefficients, it has been found that Mar1 is the most powerful only for the group of asymmetric distributions. For the group of symmetric distributions the power of this test is the lowest (compared to other tests).
In order to supplement and emphasize the results presented in
Table 2,
Table 3,
Table 4 and
Table 5, the generalized line diagrams were drawn using the Trellis display [
26] multivariate data visualization method. The resulting graph is shown in
Figure 2 which shows that the New test is significantly more powerful than the other tests. The power of the Mar1 tests is the lowest compared with the other tests.
Figure 2 indicate that the power of the tests increases as the sample size increases. By increasing the dimensions of the power of 8 (AD, CHI2, CVM, Energy, HZ, New, Mar1 and NRR) tests decreases while the power of the other (DH, DN, LV, Mar2 and Roy) tests increases slightly. For small sample sizes, the most powerful tests are New, Roy and DH. For large sample sizes, the most powerful tests are New, Energy, HZ and LV.






{kind=link}
{kind=link}