Abstract
This paper investigates the global fixed-time tracking control problem of nonlinear cascade systems with unknown high powers. In the process of control design, a upper bound and a lower bound of high powers are introduced to compensate the unknown system powers, and a state feedback controller is designed under any initial system conditions. Based on the Lyapunov stability analysis method and the fixed-time stability theory, it is verified that the proposed method can regulate the output tracking error to a disc region of the origin within a fixed-time and all the closed-loop signals are bounded. At last, the effectiveness of the proposed scheme is verified by some simulation results.
1. Introduction
As well known, the problem of output regulation is one of the most important issues in the control field. Based on Lyapunov stability theory and backstepping approach, generous results about output regulations have been achieved for various nonlinear systems. For a class of nonlinear cascade systems with high powers, using adding a power integrator technique [1,2,3], many scholars have given great efforts to design feedback controllers and achieved massive results on output regulations, see [4,5,6,7,8,9,10], and references therein. Comparing with the asymptotic control performance, finite-time control has faster convergence rate and higher accuracy. Therefore, many effective approaches have been developed to finite-time stabilization and/or output tracking control of nonlinear cascade systems with high powers in the past few years [11,12,13]. For example, Sun et al. established fast finite-time control schemes for nonlinear cascade systems with different circumstances [14,15,16]; Wang et al. investigated finite-time tracking control problem based on event-triggered mechanism [17]; Liu et al. investigated finite-time stabilization via switching adaptive feedback controller [18].
It should be noted that the settling times of finite-time stability systems depend on the initial states [19], which may lead to some limitations in the control process. As an extension of finite-time stability, the performance of fixed-time stability is superior to finite-time one in that the settling time has an upper bound being regardless of initial conditions. The concept of fixed-time stability is proposed in [20], and is further studied in [21,22]. Due to its advantages in the settling time, many researchers pay great attentions to the fixed-time control and much interesting results have been obtained [23,24,25,26,27]. Up to now, there are some fixed-time control results concerned with high-order nonlinear cascade systems. For example, Chen et al. achieved the fixed-time stabilisation [28]; Yu et al. designed a new fixed-time controller based on a serial of exponential functions and fractional power integration [29]. Ma et al. achieved the tracking control performance for high-order nonlinear cascade systems within a fixed-time [30]. Despite the above efforts, in the previous results, all the high powers of the nonlinear cascade systems are precisely known and limited to odd integers and/or ratios of odd integers.
With the development of control technology, many scholars have investigated the control problem of nonlinear cascade systems with time-varying high powers. The output feedback stabilization is developed for nonlinear systems with time-varying high powers in [31]. The global stabilization and practical tracking are achieved for unknown time-varying powers in [32]. Wang et al. achieved adaptive stabilization by switching adaptive controller for nonlinear systems with unknown powers [33]. Xie et al. achieved tracking control of nonlinear systems with full-state constraints and unknown powers [34]. The least of perfection is that these results are all about asymptotic stabilization or/and asymptotic tracking control. To the authors’ knowledge, no results about fixed-time tracking control have been reported for nonlinear cascade systems with unknown high powers.
Motivated by the above observations, this paper studies practical fixed-time tracking control for nonlinear cascade systems with unknown high powers. The main contributions of this article are summarized as follows:
- A state feedback fixed-time tracking controller is designed for a class of nonlinear cascade systems with time-varying high powers. Using Lyapunov stability analysis method and fixed-time stability theory, it is verified that the output tracking error can be regulated to a disc region of the origin within a fixed-time by the proposed method, and the settling time is regardless of initial conditions.
- In comparison with most existing results for high-order nonlinear systems, system high powers in this work are relaxed to positive time-varying functions, which makes the considered systems more generally. A upper bound and a lower bound of high powers are introduced in the proposed controller, which are powerful to compensate the time-varying powers.
The organization of this paper is as follows. Section 1 describes the problem formulation and preliminaries of this work. Section 2 provides the control design and performances analysis. Two simulation examples are given in Section 3. Some concluded remarks are given in Section 4.
Notation 1.
: the set of all real j-dimensional vectors; : the set of all nonnegative real numbers; , denotes its sign function; .
For convenience, the functions are sometimes simplified, for instance, a function is simplified by or . A basic block architecture of tracking control is given in Figure 1.
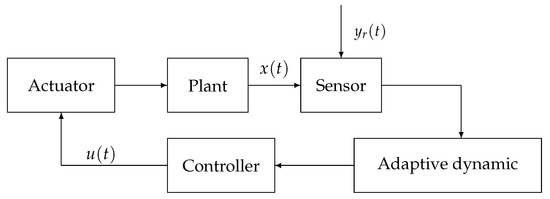
Figure 1.
The fixed-time tracking control architecture.
2. Problem Formulation and Preliminaries
Consider the following nonlinear cascade systems
where is the system state; and are system input and system output, respectively; The nonlinear functions and are unknown but locally Lipschitz in their arguments; denotes time-varying disturbance; The system high powers are time-varying functions satisfying , and there exists at least one in system (1).
Control Objective: Design a state-feedback controller for system (1) such that the output tracking error can be regulated to a disc region of the origin within a fixed-time regardless of initial conditions, and all the closed-loop signals are bounded.
The following assumptions are given to achieve the control objective.
Assumption 1.
The reference signal and its first derivative are bounded, i.e., there holds
where κ is an unknown positive constant.
Assumption 2.
The disturbances are bounded, i.e., there holds
where is an unknown positive constant.
Assumption 3.
For each , there holds
where θ is an unknown positive constant, and is known positive smooth function.
Assumption 4.
For each , there holds with q being a known positive constant.
Assumption 5.
The functions are either strictly positive or strictly negative, and there holds
where and are known positive smooth functions. In this work, we assume .
Remark 1.
Assumptions 1, 2 and 5 can be widely found in the existing tracking control results. Assumption 3 means that the growth conditions of nonlinearities are not needed, so the nonlinearities in system (1) are more general than those in [3,5]. Assumption 4 indicates that time-varying powers have a known upper bound.
The following definitions and lemmas are given to facilitate the design of tracking controller.
Definition 1
([21]). Consider the nonlinear system:
where is the system state, is a continuous function with Y being an open neighborhood of the origin . System (2) is globally fixed-time stable if it is stable, and for any , there exists a function such that the solution of (2) satisfying and , . Moreover, there holds , where is a positive constant.
Lemma 1
([21,35]). Consider system (2). If there exists a positive definite function and some constants , , , and such that the time derivative of satisfies
then system (2) is practical fixed-time stable. Moreover, the residual set of the trajectory can be described by
where , and the settling time is bounded by
Lemma 2
([31]). For any and any continuous functions , and , there holds
Lemma 3
([31]). For any and any continuous function , there holds
Lemma 4
([32]). For any and any continuous function , there holds
Lemma 5
([32]). For any , If a continuous function satisfies , there holds
3. Main Results
3.1. Control Design
In this section, we will design a state feedback tracking controller for system (1).
Motivated by the control law designed in the related literature [4,32], the actual state feedback controller is designed as
with being recursively introduced by
where is virtual control signal designed by
where are known positive functions to be designed later.
With suitable choice of , we can obtain the following property of the resulting closed-loop system.
Proposition 1.
Proof.
Next, we give the appropriate estimations for the right side of (7) (remarked by , respectively).
By Assumptions 1–3 and Lemma 2, one has
where and are unknown positive constants, L is the constant parameter to be designed, , and are all known positive smooth functions. Particularly, and are independent of , depends on but not on .
By Assumptions 1–4, and Lemmas 2 and 5, one has
where is an unknown positive constant, and is a known positive smooth function, which depends on but not on .
From Assumptions 3 and 4, Lemmas 2, 4 and 5, we have
where is a known positive smooth function, which depends on but not on .
Finally, substituting the estimations of into (7), we have
with .
Next, we design the smooth functions step-by-step. Firstly, we design
In turn, are designed as
The proof of Proposition 1 is completed. □
3.2. Stablity Analysis
Theorem 1.
Proof.
Define the set
We can deduce from (23) that
Thus, the signals enter in a finite time and stay in thereafter. Therefore, are bounded. Invoking (3) and (4), we can recursively conclude that the system state and the actual input u are bounded by that of and , and the smoothness of . Therefore, all the closed-loop signals are bounded.
According to Lemma 1 and the definition of V, it follows from (23) that
with
which means that the output tracking error converges into a region within a fixed-time.
This completes the proof. □
Remark 2.
This work concentrates on the tracking problem of nonlinear systems with parameter unknowns and external disturbances, so the tracking error is regulated to an adjustable compact set rather than zero within a fixed time. The radius of the region is related to the constant C, where , so we can choose large L to obtain smaller radius of . It means that the tracking error can be rendered arbitrarily small by adjusting L large enough. Although the size of the region can be reduced, the larger parameter L also result to larger control effort, thus the tradeoff between tracking precision and control effort should be made according to the actual situation.
4. Simulation Results
Example 1.
Consider the following high-order nonlinear cascade system
where and are unknown constants, , and are disturbances. The desired trajectory . Obviously, system (28) satisfies Assumptions 1–5 with , and .
In the simulation, we select , , , , , and the initial conditions as follows:
Case 1:.
Case 2:.
Figure 2, Figure 3, Figure 4 and Figure 5 present the simulation results. Figure 2 displays the trajectories of output y and reference signal under the two cases. Figure 3 displays the curve of the output tracking error . The trajectories of the state is displayed in Figure 4. Figure 5 presents the control input . From the simulation results, it can be observed that all the closed-loop signals of the considered system are globally bounded, and the output tracking error is regulated to a disc region within a fixed-time. This clearly clarify the effectiveness of the proposed control approach.
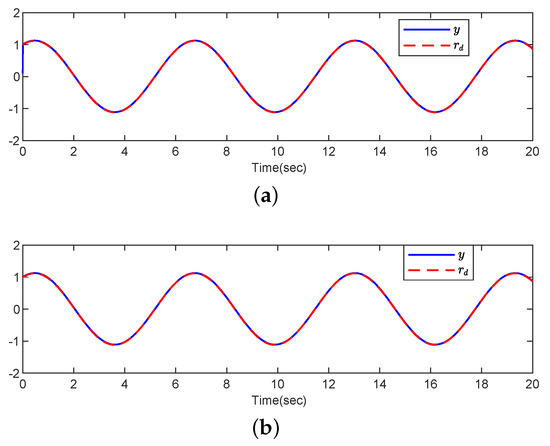
Figure 2.
(a) The trajectories of and under case 1. (b) The trajectories of and under case 2.
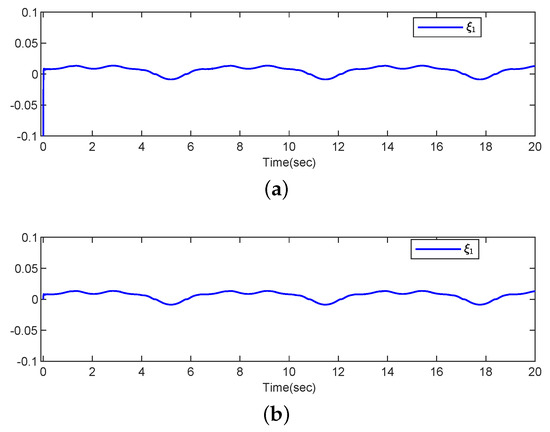
Figure 3.
(a) Tracking error under case 1. (b) Tracking error under case 2.
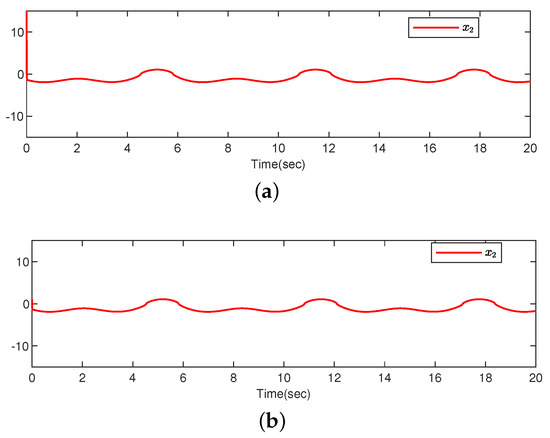
Figure 4.
(a) System state under case 1. (b) System state under case 2.
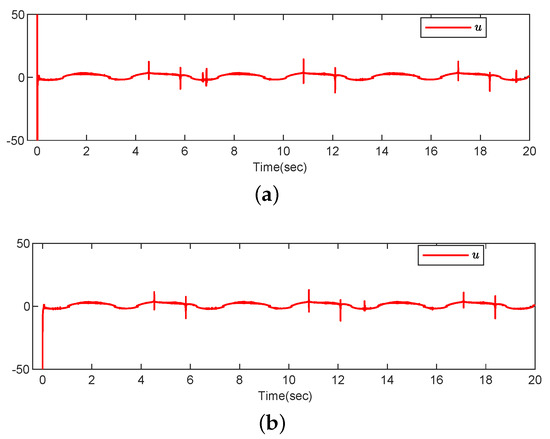
Figure 5.
(a) Control input u under case 1. (b) Control input u under case 2.
Example 2.
Consider the following high-order nonlinear cascade system
where , , , , , , , , . The desired trajectory . System (31) satisfies Assumptions 1–5 with , , , , , and .
In accordance with the process of design in Section 3, we design the smooth functions , and as follows:
where
with
In the simulation, we design parameter , select , , , and , and .
Figure 6, Figure 7, Figure 8, Figure 9 and Figure 10 present the simulation results. It can be observed that all the closed-loop signals are globally bounded, and the output tracking error is able to be regulated to a disc region within a fixed-time.
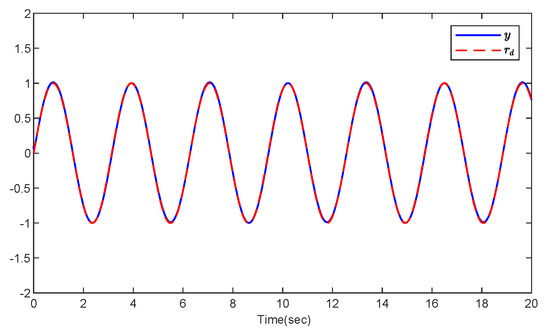
Figure 6.
The trajectories of y and .
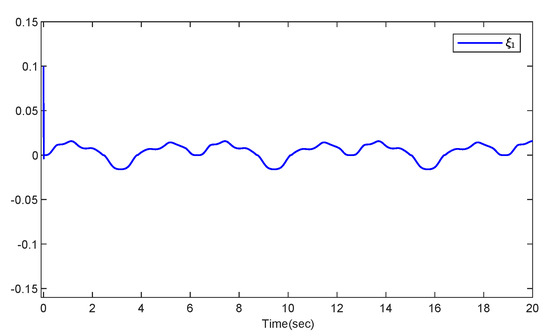
Figure 7.
Tracking error .

Figure 8.
System state .

Figure 9.
System state .
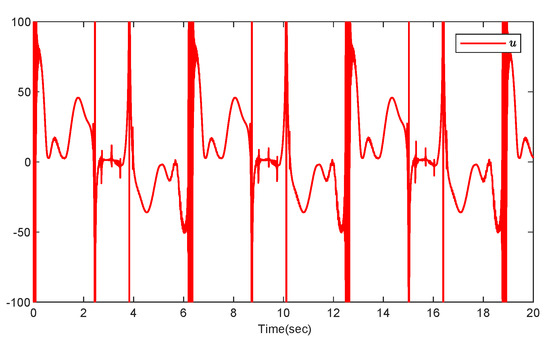
Figure 10.
Control input u.
5. Conclusions
In this work, the fixed-time practical tracking control problem has been developed for uncertain nonlinear cascade systems with unknown high powers. In the control design, a upper bound and a lower bound of high powers are introduced to compensate the unknown system powers, and a state feedback controller is designed for any initial system conditions. According to the fixed-time control theory, it is verified that the output tracking error can be regulated to a disc region of the origin within a fixed-time and all the closed-loop signals are bounded. The above control scheme has been developed under the requirement that the control directions are known a priori. Further studies will extend the fixed-time tracking control to the systems with unknown control directions. In future, the developed control scheme also can be extend to stochastic nonlinear systems [36,37], high-order time-delay nonlinear systems and high-order switched nonlinear systems.
Author Contributions
Conceptualization, J.D. and W.Z.; methodology, J.D.; software, J.Z.; investigation, J.Z.; resources, L.M.; writing—original draft preparation, J.D.; writing—review and editing, W.Z.; supervision, W.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China grant number 61973198.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lin, W.; Qian, C.J. Adding one power integrator: A tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C.J. Adaptive control of nonlinearly parameterized systems: The smooth feedback Case. IEEE Trans. Autom. Control 2002, 47, 1249–1266. [Google Scholar] [CrossRef]
- Qian, C.J.; Lin, W. Practical output tracking of nonlinear systems with uncontrollable unstable linearization. IEEE Trans. Autom. Control 2002, 47, 21–36. [Google Scholar] [CrossRef]
- Lin, W.; Pongvuthithum, R. Adaptive output tracking of inherently nonlinear systems with nonlinear parameterization. IEEE Trans. Autom. Control 2003, 48, 1737–1749. [Google Scholar] [CrossRef]
- Yan, X.H.; Liu, Y.G. Global practical tracking for high-order uncertain nonlinear systems with unknown control directions. SIAM J. Control Optim. 2010, 48, 4453–4473. [Google Scholar] [CrossRef]
- Zhao, X.; Shi, P.; Zheng, X.; Zhang, J. Intelligent tracking control for a class of uncertain high-order nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1976–1982. [Google Scholar] [CrossRef]
- Yu, J.B.; Zhao, Y.; Wu, Y.Q. Global robust output tracking control for a class of uncertain cascaded nonlinear systems. Automatica 2018, 93, 274–281. [Google Scholar] [CrossRef]
- Wu, Y.; Xie, X.J. Adaptive fuzzy control for high-order nonlinear time-delay systems with full-state constraints and input saturation. IEEE Trans. Fuzzy Syst. 2020, 28, 1652–1663. [Google Scholar] [CrossRef]
- Xie, X.J.; Wu, Y.; Hou, Z.G. Further results on adaptive practical tracking for high-order nonlinear systems with full-state constraints. IEEE Trans. Cybern. 2022, 52, 9978–9985. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.F.; Wu, Y.Q.; Xia, J.W. Adaptive fuzzy event-triggered control for high-order nonlinear systems with prescribed performance. IEEE Trans. Cybern. 2022, 52, 2885–2895. [Google Scholar] [CrossRef]
- Fu, J.; Ma, R.C.; Chai, T.Y. Adaptive finite-time stabilization of a class of uncertain nonlinear systems via logic-based switchings. IEEE Trans. Autom. Control 2017, 62, 5998–6003. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint. Automatica 2020, 111, 108581. [Google Scholar] [CrossRef]
- Sun, W.J.; Zhao, J.S.; Sun, W.; Xia, J.W.; Sun, Z.Y. Adaptive event-triggered global fast finite-time control for a class of uncertain nonlinear systems. Int. J. Robust Nonlin. Control 2020, 30, 3773–3785. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Yun, M.M.; Li, T. A new approach to fast global finite-time stabilization of high-order nonlinear system. Automatica 2017, 81, 455–463. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Shao, Y.; Chen, C.C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica 2019, 106, 339–348. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Peng, Y.R.; Wen, C.Y.; Chen, C.C. Fast finite-time adaptive stabilization of high-order uncertain nonlinear system with an asymmetric output constraint. Automatica 2020, 121, 109170. [Google Scholar] [CrossRef]
- Wang, H.Q.; Song, L.; Liu, P.X.; Li, Y.X. Control of high-order nonlinear systems under error-to-actuator based event-triggered framework. Int. J. Control 2021. [Google Scholar] [CrossRef]
- Liu, C.Y.; Liu, Y.G. Finite-time stabilization with arbitrarily prescribed settling-time for uncertain nonlinear systems. Syst. Control Lett. 2022, 159, 105088. [Google Scholar] [CrossRef]
- Ding, J.L.; Zhang, W.H. Finite-time adaptive control for nonlinear systems with uncertain parameters based on the command filters. Int. J. Adapt. Control Signal Process. 2021, 35, 1754–1767. [Google Scholar] [CrossRef]
- Andrieu, V.; Praly, L.; Astolfi, A. Homogeneous approximation, recursive observer design, and output feedback. SIAM J. Control Optim. 2008, 47, 1814–1850. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Polyakov, A.; Efimov, D.; Perruquetti, W. Finite-time and fixed-time stabilization: Implicit Lyapunov function approach. Automatica 2015, 51, 332–340. [Google Scholar] [CrossRef]
- Zuo, Z. Non-singular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Tian, B.L.; Zuo, Z.Y.; Yan, X.M.; Wang, H. A fixed-time output feedback control scheme for double integrator systems. Automatica 2017, 80, 17–24. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, C.Y.; Tan, S.L.; Song, Y.D. Prespecifiable fixed-time control for a class of uncertain nonlinear systems in strict-feedback form. Int. J. Robust Nonlin. Control 2019, 30, 1203–1222. [Google Scholar] [CrossRef]
- Lu, K.X.; Liu, Z.; Wang, Y.N.; Chen, C.L.P. Fixed-time adaptive fuzzy control for uncertain nonlinear. IEEE Trans. Fuzzy Syst. 2021, 29, 3769–3781. [Google Scholar] [CrossRef]
- Sun, W.; Diao, S.Z.; Su, S.F.; Sun, Z.Y. Fixed-time adaptive neural network control for nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. Fixed-time stabilisation for a class of high-order non-linear systems. IET Control. Theory Appl. 2018, 12, 2578–2587. [Google Scholar] [CrossRef]
- Yu, L.Y.; Sun, Z.Y.; Meng, Q.H.; Chen, C.C. A new finite-time stabilizing design for a class of high-order uncertain nonlinear systems and its application in maglev systems. IEEE Trans. Syst. Man Cybern. Syst. 2022. [Google Scholar] [CrossRef]
- Ma, J.W.; Wang, H.Q.; Qiao, J.F. Adaptive neural fixed-time tracking control for high-order nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Chen, C.C.; Qian, C.J.; Lin, X.Z.; Sun, Z.Y.; Liang, Y.W. Smooth output feedback stabilization for a class of nonlinear systems with time-varying powers. Int. J. Robust Nonlin. Control 2017, 27, 5113–5128. [Google Scholar] [CrossRef]
- Man, Y.C.; Liu, Y.G. Global adaptive stabilization and practical tracking for nonlinear systems with unknown powers. Automatica 2019, 100, 171–181. [Google Scholar] [CrossRef]
- Wang, M.Q.; Liu, Y.G.; Man, Y.C. Switching adaptive controller for the nonlinear systems with uncertainties from unknown powers. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2375–2385. [Google Scholar] [CrossRef]
- Xie, X.J.; Guo, C.; Cui, R.H. Removing feasibility conditions on tracking control of full-state constrained nonlinear systems with time-varying powers. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6535–6543. [Google Scholar] [CrossRef]
- Jiang, B.Y.; Hu, Q.L.; Friswell, M.I. Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Contr. Syst. Technol. 2016, 24, 1892–1898. [Google Scholar] [CrossRef]
- Yuan, Y.X.; Zhao, J.S.; Sun, Z.Y. Fast finite time stability of stochastic nonlinear systems. J. Franklin. Inst. 2022, 359, 9039–9055. [Google Scholar] [CrossRef]
- Zhang, T.L.; Deng, F.Q.; Sun, Y.; Shi, P. Fault estimation and fault-tolerant control for linear discrete time-varying stochastic systems. Sci. China Inf. Sci. 2021, 64. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).