
Research on Pore Pressure Detection While Drilling Based on Mechanical Specific Energy


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory
2.1. Downhole Parmeters
2.2. Drilling Parameters under Compound Drilling
2.3. Normal Trendline
2.4. Estimation of Pore Pressure
2.5. Methodology
- (1)
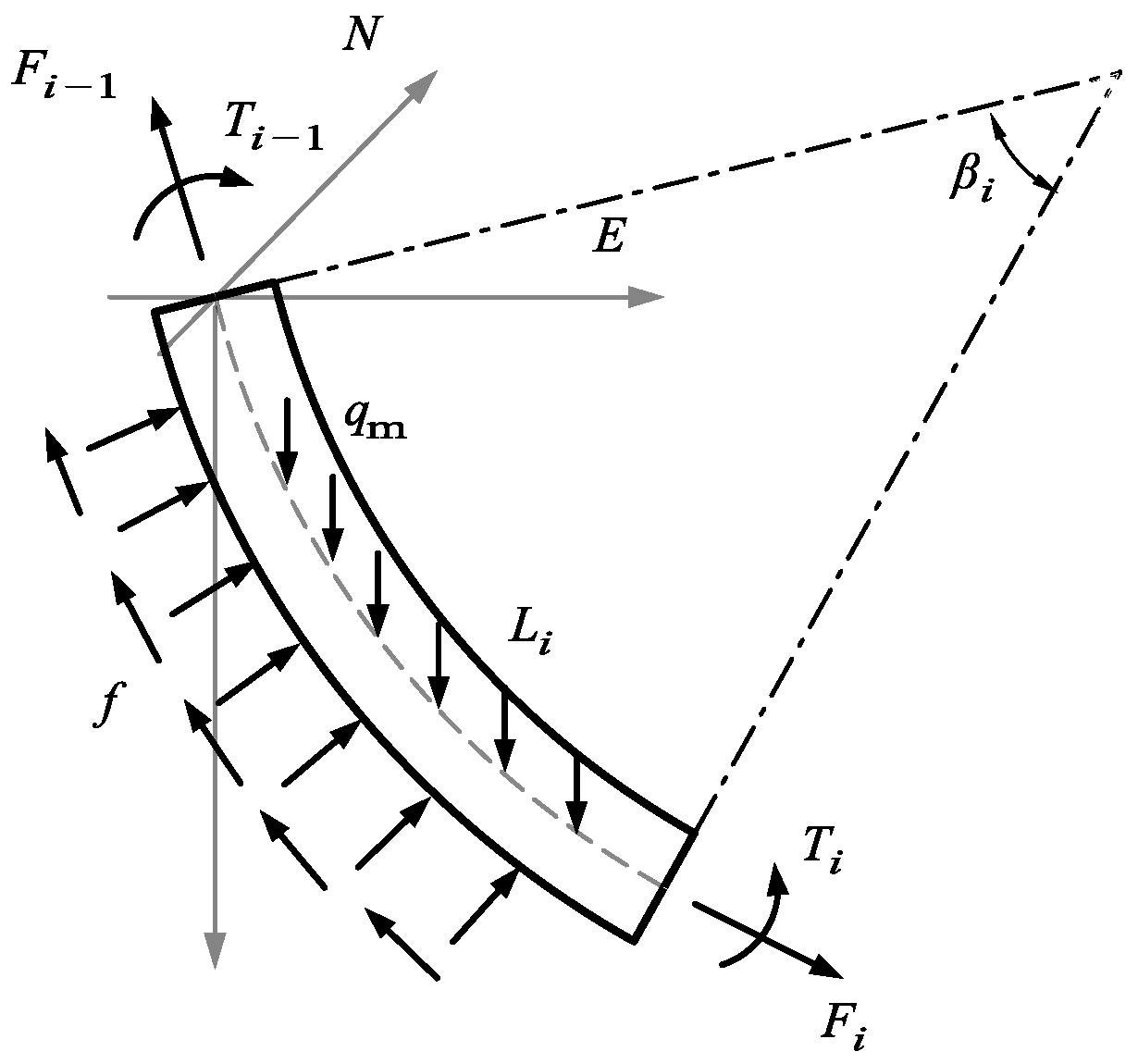
- The downhole parameters were numerically solved using Equations (22)–(25) based on the well geometry, bottom hole assembly (BHA), and surface measurements. When using PDM, we estimated its contribution to bit torque and rotary speed using Equations (26)–(32) based on the permissible and recommended parameters of the PDM.
- (2)
- We calculated the MSE at a given depth using Equation (33) and plotted the MSE against depth on a semi-log.
- (3)
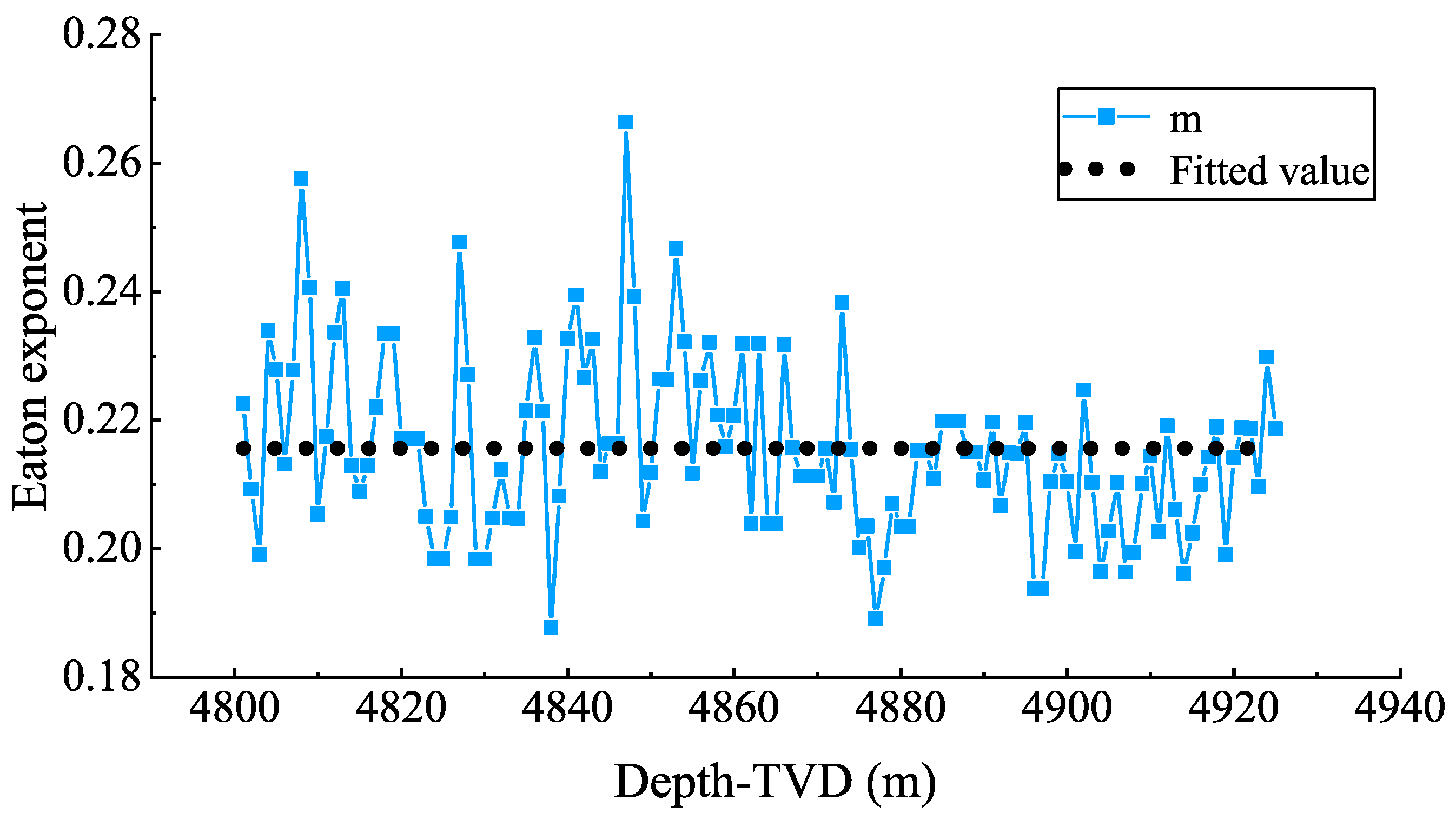
- We selected a clean shale interval with reliable drilling parameters to establish the normal trend line, which can be appropriately filtered for abnormal points.
- (4)
- The Eaton exponent can be corrected by Equation (36) in overpressure intervals with clear pore pressure from the offset or current well. Then, the pore pressure at a given depth can be estimated using Eaton’s model.
3. Results
4. Discussion
5. Conclusions
- (1)
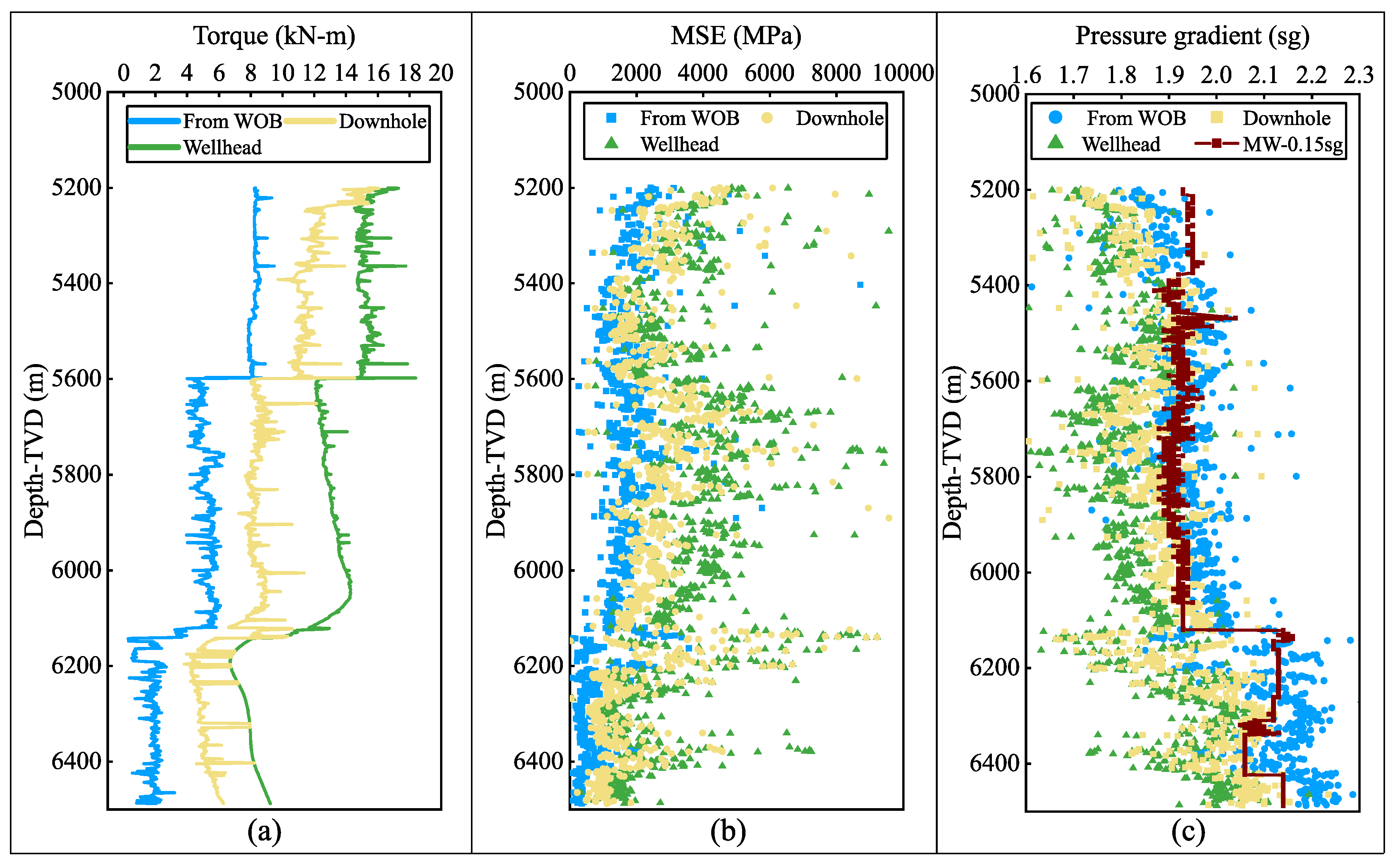
- A mechanical-specific energy-based drilling parameter method is proposed and validated to provide reasonable pore pressure estimates in deep complex lithologic intervals. The computation of MSE uses downhole parameters as far as possible. When reliable downhole measurements are lacking, a method based on drill string mechanics is proposed to estimate friction losses along the drill string by considering wellbore geometry and surface drilling parameters. In this way, more accurate drilling parameters at the bit can be obtained in real-time.
- (2)
- Torsional energy is the primary source of contribution to MSE, and MSE-based pore pressure detection is highly sensitive to downhole torque. More attention and effort should be paid to the measurement and estimation of downhole torque. It should also be noted that when using PDM, the contribution of the PDM to the total MSE needs to be fully considered.
- (3)
- The new method relies on trend lines and requires correction of the Eaton exponent, which has the influence of subjectivity. Moreover, all factors that are not related to pore pressure but can lead to significant changes in MSE may cause the overpressure conditions to be masked. At this point, the MSE-based method needs to refer to log data and actual drilling conditions from offset wells.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J. Pore pressure prediction from well logs: Methods, modifications, and new approaches. Earth-Sci. Rev. 2011, 108, 50–63. [Google Scholar] [CrossRef]
- Hottmann, C.E.; Johnson, R.K. Estimation of formation pressures from log–derived shale properties. J. Pet. Technol. 1965, 17, 717–722. [Google Scholar] [CrossRef]
- Pennebaker, E.S. Seismic data indicate depth, magnitude of abnormal pressure. World Oil 1968, 166, 73–78. [Google Scholar]
- Gardner, G.H.; Gardner, L.W.; Gregory, A.R. Formation velocity and density—The diagnostic basics for stratigraphic traps. Geophysics 1974, 39, 770–780. [Google Scholar] [CrossRef] [Green Version]
- Eaton, B.A. The equation for geopressure prediction from well logs. In Proceedings of the Fall Meeting of the Society of Petroleum Engineers of AIME, Dallas, TX, USA, 1 January 1975. [Google Scholar]
- Fillippone, W.R. On the prediction of abnormally pressured sedimentary rocks from seismic data. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April 1979. [Google Scholar]
- Wang, L.; Yang, R.; Sun, Z.; Wang, L.; Guo, J.; Chen, M. Overpressure: Origin, Prediction, and Its Impact in the Xihu Sag, Eastern China Sea. Energies 2022, 15, 2519. [Google Scholar] [CrossRef]
- Bowers, G.L. Pore pressure estimation from velocity data: Accounting for overpressure mechanisms besides undercompaction. SPE Drill. Complet. 1995, 10, 89–95. [Google Scholar] [CrossRef]
- Atashbari, V.; Tingay, M.R. Pore pressure prediction in carbonate reservoirs. In Proceedings of the SPE Oil and Gas India Conference and Exhibition, Mumbai, India, 4–6 April 2012. [Google Scholar]
- Azadpour, M.; Manaman, N.; Kadkhodaie-Ilkhchi, A.; Sedghipour, M. Pore pressure prediction and modeling using well-logging data in one of the gas fields in south of Iran. J. Pet. Sci. Eng. 2015, 128, 15–23. [Google Scholar] [CrossRef]
- Atashbari, V. Origin of Overpressure and Pore Pressure Prediction in Carbonate Reservoirs of the Abadan Plain Basin. Ph.D. Thesis, The University of Adelaide, Adelaide, Australia, November 2016. [Google Scholar]
- Chen, X.; Cao, W.; Gan, C.; Wu, M. A hybrid partial least squares regression-based real time pore pressure estimation method for complex geological drilling process. J. Pet. Sci. Eng. 2022, 210, 109771. [Google Scholar] [CrossRef]
- Jorden, J.R.; Shirley, O.J. Application of drilling performance data to overpressure detection. J. Pet. Technol. 1966, 18, 1387–1394. [Google Scholar] [CrossRef]
- Rehm, B.; McClendon, R. Measurement of formation pressure from drilling data. In Proceedings of the Fall Meeting of the Society of Petroleum Engineers of AIME, New Orleans, LA, USA, 3 October 1971. [Google Scholar]
- Belotti, P.; Gerard, R.E. Istantaneous log indicates porosity and pore pressure. World Oil 1976, 183, 90–94. [Google Scholar]
- Wang, Z. Detection of abnormal pressure while drilling in carbonate formations of northeastern Sichuan Basin. Acta Pet. Sin. 2012, 33, 1068–1075. [Google Scholar]
- Teale, R. The concept of specific energy in rock drilling. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts. Pergamon 1965, 2, 57–73. [Google Scholar] [CrossRef]
- Pinto, C.N.; Lima, A.L.P. Mechanical specific energy for drilling optimization in deepwater Brazilian salt environments. In Proceedings of the IADC/SPE Asia Pacific Drilling Technology Conference, Singapore, 24 August 2016. [Google Scholar]
- Wei, M.; Li, G.; Shi, H.; Shi, S.; Li, Z.; Zhang, Y. Theories and applications of pulsed-jet drilling with mechanical specific energy. SPE J. 2016, 21, 303–310. [Google Scholar]
- Zhou, Y.; Zhang, W.; Gamwo, I.; Lin, J.S. Mechanical specific energy versus depth of cut in rock cutting and drilling. Int. J. Rock Mech. Min. Sci. 2017, 100, 287–297. [Google Scholar] [CrossRef]
- Hassan, A.; Elkatatny, S.; Al-Majed, A. Coupling rate of penetration and mechanical specific energy to Improve the efficiency of drilling gas wells. J. Nat. Gas Sci. Eng. 2020, 83, 103558. [Google Scholar] [CrossRef]
- Mazen, A.Z.; Rahmanian, N.; Mujtaba, I.M.; Hassanpour, A. Effective mechanical specific energy: A new approach for evaluating PDC bit performance and cutters wear. J. Pet. Sci. Eng. 2021, 196, 108030. [Google Scholar] [CrossRef]
- Nystad, M.; Aadnøy, B.S.; Pavlov, A. Real-time minimization of mechanical specific energy with multivariable extremum seeking. Energies 2021, 14, 1298. [Google Scholar] [CrossRef]
- Yu, B.; Zhang, K.; Niu, G. Rock strength determination based on rock drillability index and drilling specific energy: Numerical simulation using discrete element method. IEEE Access 2021, 9, 43923–43937. [Google Scholar] [CrossRef]
- Oloruntobi, O.; Butt, S. Application of specific energy for lithology identification. J. Pet. Sci. Eng. 2020, 184, 106402. [Google Scholar] [CrossRef]
- Khalilidermani, M.; Knez, D. A Survey of Application of Mechanical Specific Energy in Petroleum and Space Drilling. Energies 2022, 15, 3162. [Google Scholar] [CrossRef]
- Yassien, M.A.; Sayed, M.A.; Boghdady, G.Y.; Ali, M.A.M.; Mohamed, A.S. Experimental research into the effect of some operation factors and rock properties on the rate of penetration. Min. Miner. Depos. 2020, 14, 38–43. [Google Scholar] [CrossRef]
- Cardona, J. Fundamental Investigation of Pore Pressure Prediction during Drilling from the Mechanical Behavior of Rocks. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2011. [Google Scholar]
- Majidi, R.; Albertin, M.; Last, N. Pore-pressure estimation by use of mechanical specific energy and drilling efficiency. SPE Drill. Complet. 2017, 32, 97–104. [Google Scholar] [CrossRef]
- Mohan, K.; Adil, F.; Samuel, R. Comprehensive hydromechanical specific energy calculation for drilling efficiency. J. Energy Resour. Technol. 2015, 137, 1–8. [Google Scholar] [CrossRef]
- Oloruntobi, O.; Adedigba, S.; Khan, F.; Chunduru, R.; Butt, S. Overpressure prediction using the hydro-rotary specific energy concept. J. Nat. Gas Sci. Eng. 2018, 55, 243–253. [Google Scholar] [CrossRef]
- Oloruntobi, O.; Butt, S. Energy-based formation pressure prediction. J. Pet. Sci. Eng. 2019, 173, 955–964. [Google Scholar] [CrossRef]
- Mohan, K.; Adil, F. Tracking Drilling Efficiency Using Hydro-Mechanical Specific Energy. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, Amsterdam, The Netherlands, 17–19 March 2009. [Google Scholar]
- Cui, M.; Li, J.; Ji, G.; Chen, Y. Optimize method of drilling parameter of compound drilling based on mechanical specific energy theory. Pet. Drill. Tech. 2014, 42, 66–70. [Google Scholar]
- Pessier, R.C.; Fear, M.J. Quantifying common drilling problems with mechanical specific energy and a bit-specific coefficient of sliding friction. In Proceedings of the SPE Annual Technical Conference and Exhibition, Washington, DC, USA, 4–7 October 1992. [Google Scholar]
- Jacques, A.; Ouenes, A.; Dirksen, R.; Paryani, M.; Rehman, S.; Bari, M. Completion Optimization While Drilling–Geomechanical Steering Towards Fracable Rock Using Corrected Mechanical Specific Energy. In Proceedings of the SPE/AAPG/SEG Unconventional Resources Technology Conference, Austin, TX, USA, 24–26 July 2017. [Google Scholar]
- Ouenes, A.; Dirksen, R.; Paryani, M.; Rehman, S.; Bari, M. Completion Optimization While Drilling–Geomechanical Steering towards Fracable Rock for Optimal Selection of Stage Spacing and Cluster Density in Unconventional Wells. In Proceedings of the SPE Kingdom of Saudi Arabia Annual Technical Symposium and Exhibition, Dammam, Saudi Arabia, 24–27 April 2017. [Google Scholar]
- Kalinec, J.; Paryani, M.; Ouenes, A. Estimation of 3D Distribution of Pore Pressure from Surface Drilling Data–Application to Optimal Drilling and Frac Hit Prevention in the Eagle Ford. In Proceedings of the SPE/AAPG/SEG Unconventional Resources Technology Conference, Denver, CO, USA, 22–24 July 2019. [Google Scholar]
- Chen, T.; Guan, Z. Drilling Engineering Theory and Technology, 1st ed.; Petroleum University Publishing House: Dongying, China, 2000; pp. 35–36. [Google Scholar]
- Akbari, B.; Miska, S.; Mengjiao, Y.; Ozbayoglu, E. Effect of rock pore pressure on mechanical specific energy of rock cutting using single PDC cutter. In Proceedings of the 47th US Rock Mechanics/Geomechanics Symposium, San Francisco, CA, USA, 23–26 June 2013. [Google Scholar]
- Akbari, B.; Miska, S.; Yu, M.; Ozbayoglu, M. Experimental investigations of the effect of the pore pressure on the MSE and drilling strength of a PDC bit. In Proceedings of the SPE Western North American and Rocky Mountain Joint Meeting, Denver, CO, USA, 16–18 April 2014. [Google Scholar]
- Li, Q.; Chen, Z. Frictional resistance computation of setting casing in highly deviated well. Nat. Gas Ind. 1993, 13, 50–54. [Google Scholar]
- Zhang, X.; Liu, X.; Xia, H.; Tao, Q.; Peng, M. Drawdown analysis and calculation of helicoid hydraulic motor. Fault-Block Oil Gas Field 2006, 13, 60–61. [Google Scholar]
- Hu, Z.; Yuan, B.; Zhang, X.; Han, B.; Li, Y.; Lai, F.; Li, Y. Application of evaluation technique of bit efficiency while drilling. Mud Logging Eng. 2019, 30, 1–7. [Google Scholar]
- Guan, Z.; Hu, H.; Wang, B.; Sun, M.; Liu, Y.; Xu, Y. Experimental study on rock-breaking efficiency of PDC bit based on mechanical specific energy and sliding frictional coefficient. J. China Univ. Pet. (Ed. Nat. Sci.) 2019, 43, 92–100. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, H.; Cui, H.; Gao, J. Research on Pore Pressure Detection While Drilling Based on Mechanical Specific Energy. Processes 2022, 10, 1481. https://doi.org/10.3390/pr10081481
Yin H, Cui H, Gao J. Research on Pore Pressure Detection While Drilling Based on Mechanical Specific Energy. Processes. 2022; 10(8):1481. https://doi.org/10.3390/pr10081481
Chicago/Turabian StyleYin, Hu, Hongwei Cui, and Jiajia Gao. 2022. "Research on Pore Pressure Detection While Drilling Based on Mechanical Specific Energy" Processes 10, no. 8: 1481. https://doi.org/10.3390/pr10081481