
Design and Testing of the Peanut Pod Cleaning Device

Abstract
:1. Introduction
2. Design and Working Principle
2.1. Design of the Peanut Pod Cleaning Device
2.2. Design of the Electronic Information Acquisition System
3. Components Design and Parameters Determination
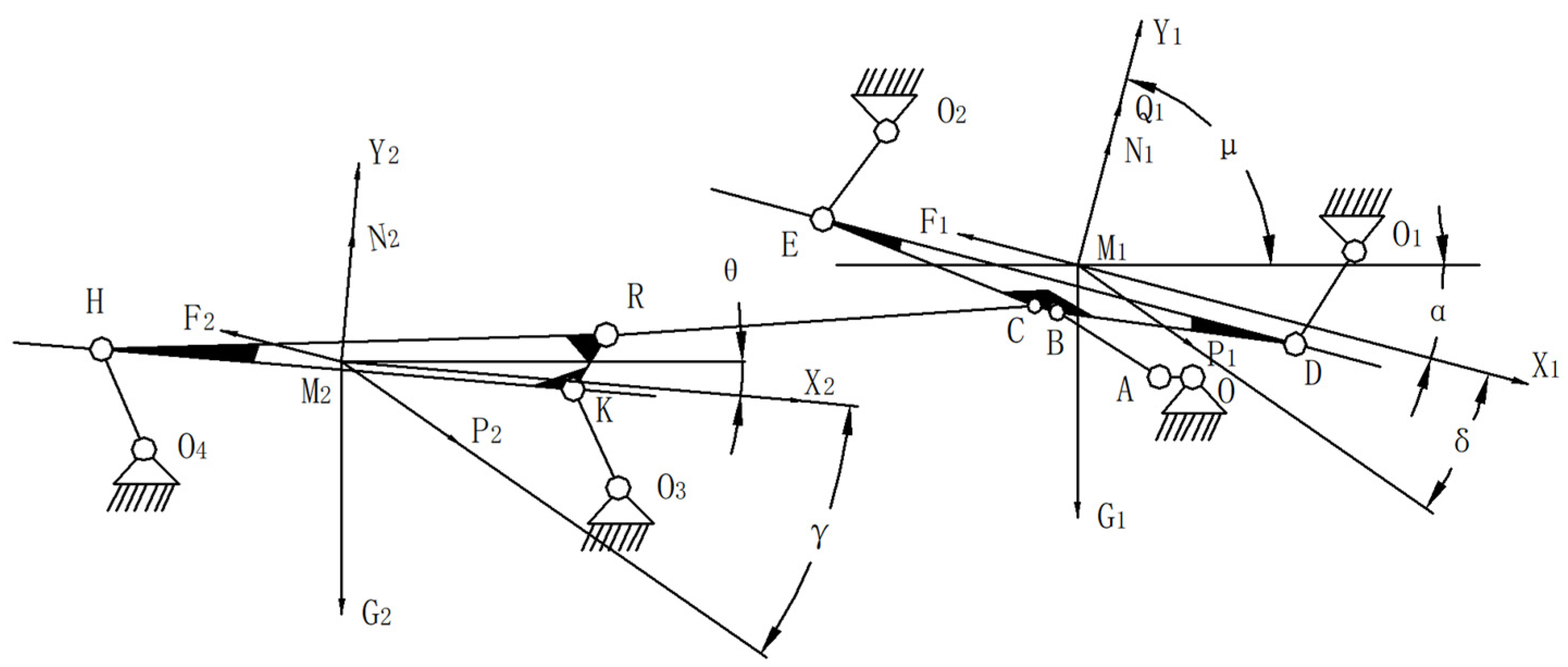
3.1. Design of the Crank-Rocker Cleaning Sieve
3.2. Determination of the Inclination and Vibration Frequency Parameters of the Hydrometric Cleaning Sieve
4. Field Test
4.1. Test Situation
4.2. Test Methods and Indicators
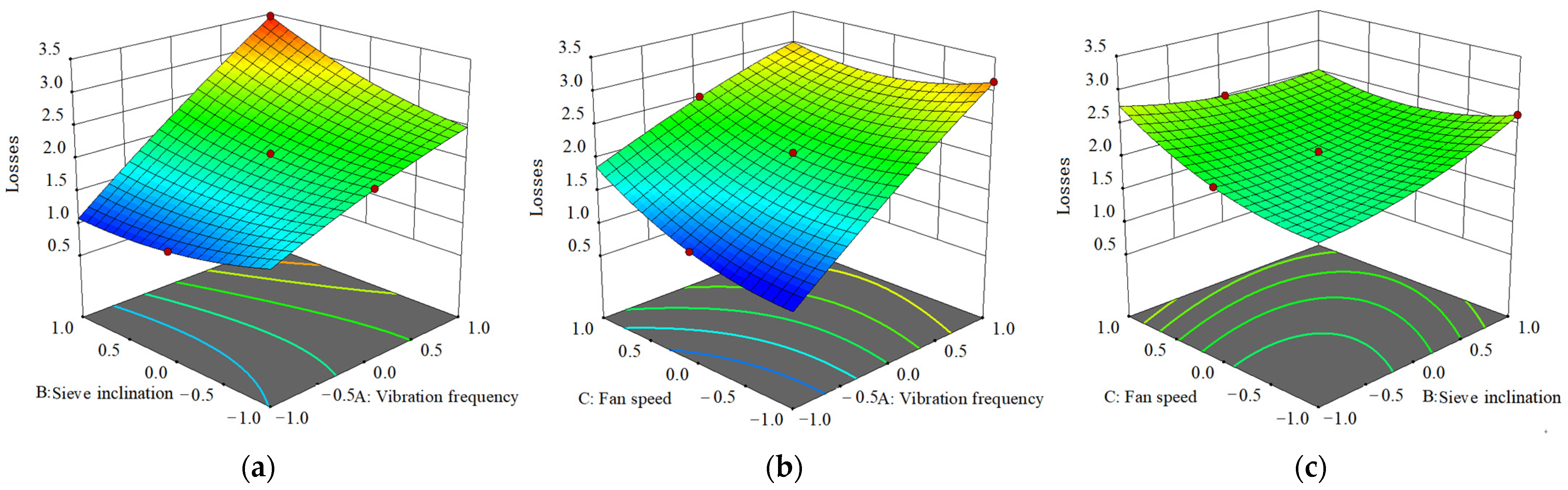
4.3. Analysis of the Losses
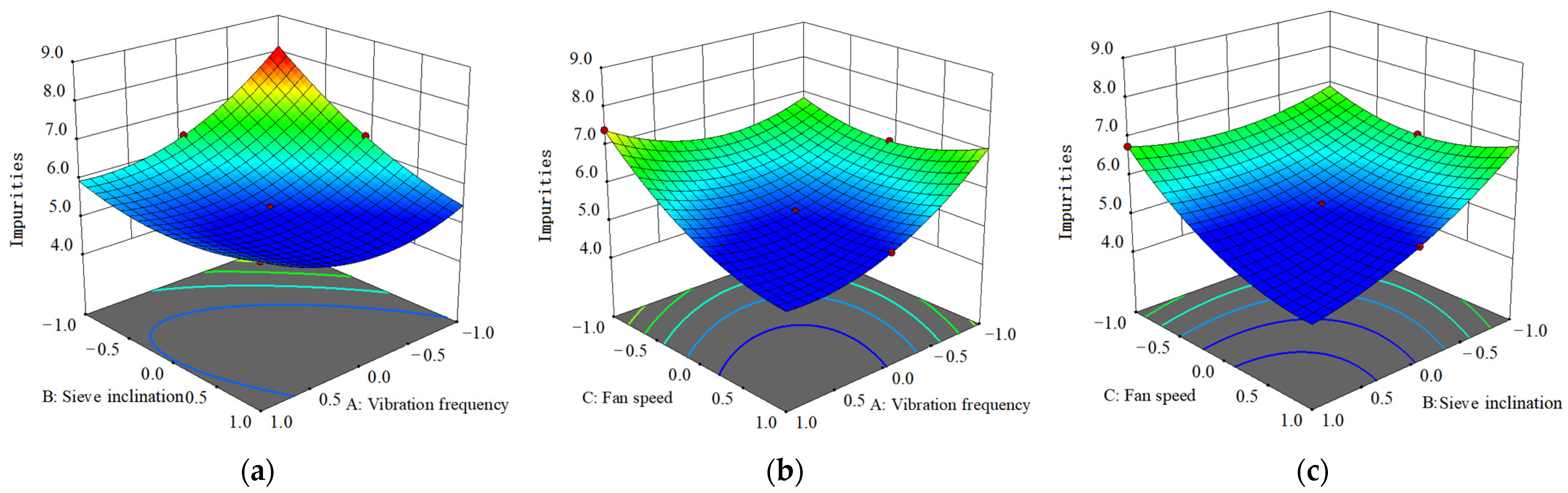
4.4. Analysis of the Impurities Test Results
4.5. Parameter Optimization and Test Verification
5. Discussion
6. Conclusions
- (1)
- The peanut pod cleaning device designed in the research is composed of a collecting bin, a reciprocating long mesh cleaning sieve, a front rotary elevator, a walking chassis, a hydrometric cleaning sieve, a rear rotary elevator, a clean material bin, and a negative pressure cleaning fan, etc. Through calculation, the optimized structural parameters of the cleaning device were obtained, which can effectively solve the problems of poor separation of impurities, high losses, film wrapping, seedling hanging, and screen surface blockage, etc., under the working conditions of a high feed rate and efficient harvest.
- (2)
- By investigating the impact of the vibration frequency, the sieve inclination, and the fan speed on the losses and impurities, the optimum working parameters were obtained in the orthogonal test. The test results showed that the design requirements were met at a vibration frequency of 5.5 Hz, hydrometric cleaning sieve inclination of 15°, reciprocating long mesh cleaning sieve inclination of 5°, and fan speed of 1500 rev/min, with mean losses of 2.26%, and mean impurity of 3.18%.
- (3)
- The test results also showed that the double-screen structure was feasible with a good cleaning effect. The rotary elevator makes the device more compact and suitable for peanut pod field cleaning. In order to achieve better cleaning effects, the three parameters of the machine, i.e., vibration frequency, screen surface inclination, and fan speed, have to be automatically regulated under different water content and soil conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Foreign Agricultural Service. World Agricultural Production; United States Department of Agriculture: Washington, WA, USA, 2020.
- National Agricultural Statistics Service. Crop Production; United States Department of Agriculture: Washington, WA, USA, 2019.
- Foreign Agricultural Service. Oileseeds: World Markets and Trade—Feb 2019; United States Department of Agriculture: Washington, WA, USA, 2019.
- Liu, J.; Tang, F.S.; Zhang, J.; Zang, X.W.; Dong, W.Z.; Yi, M.L.; Hao, X. Current status and development trends of peanut production technology in China. Chin. Agric. Sci. Bull. 2017, 33, 13–18. [Google Scholar]
- Lv, X.L.; Wang, H.; Zhang, H.J.; Hu, Z.C. Research and situation on peanut machinery harvesting in China. J. Agric. Mech. Res. 2012, 34, 245–248. [Google Scholar]
- Wang, D.W.; Shang, S.Q.; Han, K. Design and test of 4HJL-2 harvester for peanut picking-up and fruit-picking. Trans. Chin. Soc. Agric. Eng. 2013, 29, 27–36. [Google Scholar]
- Chen, Y.Q.; Wang, H.; Hu, Z.C. Research and analysis on harvest losses causes and control strategies of half-feeding peanut combine harvester. Chin. Agric. Mech. 2011, 33, 72–77. [Google Scholar]
- Chen, Z.Y.; Gao, L.X.; Charles, C. Analysis on technology status and development of peanut harvest mechanization of China and the united states. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–21. [Google Scholar]
- Gao, L.X.; Chen, Z.Y.; Charles, C. Development course of peanut harvest mechanization technology of the United States and enlightenment to China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 1–9. [Google Scholar]
- Tang, B.; Lu, Z.M.; Guo, J.; Wang, Y.Q. Experimental investigation on cleaning device of peanut combine harvester. J. Agric. Mech. Res. 2016, 38, 191–195. [Google Scholar]
- Liu, C.Y.; Wang, S.S.; Shi, Q.X.; Geng, L.X.; Yang, F. Design of peanut combine harvester cleaning system test bench. J. Agric. Mech. Res. 2018, 40, 91–95. [Google Scholar]
- Gao, L.X.; Li, X.Q.; Guan, M.; Cheng, J.; Zhang, X.D.; Liu, Z.X. Design and test on cleaning device of peanut pods with double air-suction inlets with vibration screen. Trans. Chin. Soc. Agric. Mach. 2015, 46, 110–117. [Google Scholar]
- Yu, Z.Y.; Hu, Z.C.; Cao, M.Z.; Wang, S.Y.; Zhang, P.; Peng, B.L. Design of cleaning device of tangential flow and whole-feed peanut combine harvester. Trans. Chin. Soc. Agric. Eng. 2019, 35, 29–37. [Google Scholar]
- Sun, T.Z.; Shang, S.Q.; Li, G.Y. Design of stripping and cleaning system of 4HQL-2 type full- feed peanut combine. J. Agric. Mech. Res. 2009, 31, 54–57. [Google Scholar]
- El-Sayed, A.S.; Abdel-Hadi, M.A.; El-Amir, M.S.; El-Manawy, A.I. A study on separation and cleaning of peanut seeds. Misr J. Agric. Eng. 2017, 34, 35–52. [Google Scholar] [CrossRef]
- Li, Y.M.; Zhao, Z.; Chen, J.; Xu, L.Z. Nonlinear motion law of material on air-and-screen cleaning mechanism. Trans. CSAE 2007, 23, 142–147. [Google Scholar]
- Wang, D.W.; Wang, Y.Y.; Shang, J.Q.; Sun, Q.W. Research and analysis of large-scale peanuts picking-up and fruit picking harvest machine. Collect. Pap. CSAE 2011, 90–95. [Google Scholar]
- Liu, S.; Hu, C.; Wang, D.; Shang, S. Simulation and analysis of airflow field in peanut harvester based on FLUENT. J. Agric. Mech. Res. 2013, 35, 60–64. [Google Scholar]
- Stoleru, V.; Munteanu, N.; Istrate, A. Perception Towards Organic vs. Conv. Prod. Romania. Sustain. 2019, 11, 2394. [Google Scholar] [CrossRef] [Green Version]
- Panasiewicz, M.; Sobczak, P.; Mazur, J.; Zawislak, K.; Andrejko, D. The technique and analysis of the process of separation and cleaning grain materials. J. Food Eng. 2012, 109, 603–608. [Google Scholar] [CrossRef]
- Krzysiak, Z.; Samociuk, W.; Skic, A.; Bartnik, G.; Zarajczyk, J.; Szmigielski, M.; Dziki, D.; Wierzbicki, S.; Krzywonos, L. Effect of Sieve Drum Inclination Angle on Wheat Grain Cleaning in a Novel Rotary Cleaning Device. Trans. ASABE 2017, 60, 1751–1758. [Google Scholar] [CrossRef]
- Yang, H.; Yan, J.; Wei, H.; Wu, H.; Wang, S.; Ji, L.; Xu, X.; Xie, H. Gradient Cleaning Method of Potato Based on Multi-Step Operation of Dry-Cleaning and Wet Cleaning. Agriculture 2021, 11, 1139. [Google Scholar] [CrossRef]
- Ildar, B.; Salavat, M.; Ramil, L.; Valery, P.; Permyakov, R.I.; Ruslan, N. Mathematical modeling and research of the work of the grain combine harvester cleaning system. Comput. Electron. Agric. 2019, 165, 104966. [Google Scholar]
- Yuichi, Y.; Satoshi, I.; Atsuko, S.; Yoshiyuki, S.; Jusuke, H. Estimation equation for sieving rate based on the model for undersized particles passing through vibrated particle bed. J. Chem. Eng. Jpn 2013, 46, 116–126. [Google Scholar]
- Hennig, M.; Teipel, U. Grade efficiency for sieve classification processes. Can. J. Chem. Eng. 2017, 96, 259–264. [Google Scholar] [CrossRef]
- Krzysiak, Z.; Samociuk, W.; Zarajczyk, J.; Kaliniewicz, Z.; Pieniak, D.; Bogucki, M. Analysis of the Sieve Unit Inclination Angle in the Cleaning Process of Oat Grain in a Rotary Cleaning Device. Processes 2020, 8, 346. [Google Scholar] [CrossRef] [Green Version]
- Chai, X.; Xu, L.; Li, Y.; Qiu, J.; Li, Y.; Lv, L.; Zhu, Y. Development and Experimental Analysis of a Fuzzy Grey Control System on Rapeseed Cleaning Loss. Electronics 2020, 9, 1764. [Google Scholar] [CrossRef]
- Mangwandi, C.; Cheong, Y.S.; Adams, M.J.; Hounslow, M.J.; Salman, A.D. The coefficient of restitution of different representative types of granules. Chem. Eng. Sci. 2007, 62, 437–450. [Google Scholar] [CrossRef]
- Gao, X.; Xie, H.; Gu, F.; Wei, H.; Liu, M.; Yan, J.; Hu, Z. Optimization and experiment of key components in pneumatic peanut pod conveyor. Int. J. Agric. Biol. Eng. 2020, 13, 100–107. [Google Scholar] [CrossRef]
- China Academy of Agricultural Mechanization Sciences. Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2007; Volume II. [Google Scholar]
- Li, Y.M.; Wang, Z.H.; Xu, L.Z. Motion analysis and experimental research of rape extractions on vibration sieve. Trans. Chin. Soc. Agric. Eng. 2007, 23, 111–114. [Google Scholar]
- Gao, L.X.; Zhang, W.; Du, X.; Liu, X.; Yang, J.; Liu, M.G. Experiment on aerodynamic characteristics of threshed mixtures of peanut shelling machine. Trans. Chin. Soc. Agric. Eng. 2012, 28, 289–292. [Google Scholar]
- Chen, C.Y.; Wang, Z.H.; Li, Q.L. Mechanophysical properties of rape extractive and parametrical optimization of vibration sieve. Trans. Chin. Soc. Agric. Mach. 2005, 36, 60–63+70. [Google Scholar]
- Cheng, X.G.; Zhong, L.M. Design and test on belt-type seed delivery of air-suction metering device. Trans. Chin. Soc. Agric. Eng. 2012, 28, 8–15. [Google Scholar]
- Zhang, G.Z.; Luo, X.W.; Zang, Y. Experiment of sucking precision of sucking plate with group holes on rice pneumatic metering device. Trans. Chin. Soc. Agric. Eng. 2013, 29, 13–20. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Form | Impeller Diameter D/mm | Impeller Width B/mm |
|---|---|---|
| Negative pressure centrifugal fan | 770 | 230 |
| Level | Vibration Frequency A/Hz | Sieve Surface Inclination B/° | Fan Speed C/r × min−1 |
|---|---|---|---|
| −1 | 4.75 | 12 | 1100 |
| 0 | 5.5 | 15 | 1300 |
| 1 | 6.23 | 18 | 1500 |
| Vibration Frequency A/Hz | Sieve Inclination B/° | Fan Speed C/r × min−1 | Losses R1/% | Impurities R2/% |
|---|---|---|---|---|
| −1 | −1 | −1 | 0.98 | 8.02 |
| −1 | 0 | 0 | 1.14 | 6.43 |
| −1 | 1 | 1 | 1.56 | 5.57 |
| 0 | −1 | 0 | 2.06 | 6.38 |
| 0 | 0 | 1 | 2.51 | 5.29 |
| 0 | 1 | −1 | 2.64 | 6.77 |
| 1 | −1 | 1 | 2.93 | 5.83 |
| 1 | 0 | −1 | 3.14 | 7.41 |
| 1 | 1 | 0 | 3.46 | 5.98 |
| 0 | 0 | 0 | 2.04 | 5.28 |
| 0 | 0 | 0 | 2.04 | 5.34 |
| 0 | 0 | 0 | 2.09 | 5.32 |
| No. | Losses Rate R1/% | Impurities Rate R2/% |
|---|---|---|
| 1 | 2.54 | 3.68 |
| 2 | 2.23 | 3.12 |
| 3 | 1.96 | 2.69 |
| 4 | 2.43 | 3.45 |
| 5 | 2.12 | 2.98 |
| Mean | 2.26 | 3.18 |
| Standard deviation | 0.21 | 0.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Chen, B.; Li, J.; Liu, Y.; Yang, L.; Wang, W.; Zhang, H. Design and Testing of the Peanut Pod Cleaning Device. Processes 2023, 11, 106. https://doi.org/10.3390/pr11010106
Zhu C, Chen B, Li J, Liu Y, Yang L, Wang W, Zhang H. Design and Testing of the Peanut Pod Cleaning Device. Processes. 2023; 11(1):106. https://doi.org/10.3390/pr11010106
Chicago/Turabian StyleZhu, Chenhui, Bo Chen, Jiongqi Li, Yuan Liu, Liquan Yang, Wanzhang Wang, and Hongmei Zhang. 2023. "Design and Testing of the Peanut Pod Cleaning Device" Processes 11, no. 1: 106. https://doi.org/10.3390/pr11010106
APA StyleZhu, C., Chen, B., Li, J., Liu, Y., Yang, L., Wang, W., & Zhang, H. (2023). Design and Testing of the Peanut Pod Cleaning Device. Processes, 11(1), 106. https://doi.org/10.3390/pr11010106