Abstract
The activated sludge process (ASP) is the most widely used biological wastewater treatment system. Advances in research have led to the adoption of Artificial Intelligence (AI), in particular, Nature-Inspired Algorithm (NIA) techniques such as Genetic Algorithms (GAs) and Particle Swarm Optimization (PSO) to optimize treatment systems. This has aided in reducing the complexity and computational time of ASP modelling. This paper covers the latest NIAs used in ASP and discusses the advantages and limitations of each algorithm compared to more traditional algorithms that have been utilized over the last few decades. Algorithms were assessed based on whether they looked at real/ideal treatment plant (WWTP) data (and efficiency) and whether they outperformed the traditional algorithms in optimizing the ASP. While conventional algorithms such as Genetic Algorithms (GAs), Particle Swarm Optimization (PSO), and Ant Colony Optimization (ACO) were found to be successfully employed in optimization techniques, newer algorithms such as Whale Optimization Algorithm (WOA), Bat Algorithm (BA), and Intensive Weed Optimization Algorithm (IWO) achieved similar results in the optimization of the ASP, while also having certain unique advantages.
1. Introduction
The design and operation of wastewater treatment plants must consider quite a few uncertain factors, such as the physical and chemical composition of wastewater and the biological composition of organisms used to treat the wastewater. There are increasing concerns about the environmental impacts of wastewater, in terms of safe treatment, safe disposal, and safe reuse [1,2,3]. Over the years, this has led to Artificial Intelligence techniques, predominantly nature-inspired Artificial Intelligence techniques, being used for process control within treatment plants to maximize the efficiency of treatment and decrease energy consumption [4]. This paper will attempt to provide an overview of the recent advances in nature-inspired techniques used in wastewater treatment processes.
The most common type of biological wastewater treatment is the activated sludge process (ASP). Activated sludge is a mix of wastewater that contains a population of bacteria that focus on removing biological nitrogen, biological phosphorous, and organic carbon substances from the wastewater [5]. A basic process diagram for ASP is shown in Figure 1.
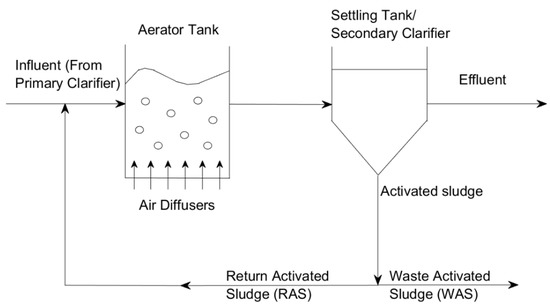
Figure 1.
Schematic of a conventional activated sludge system with basic processes shown.
2. Modelling of Activated Sludge Process
A typical model that would simulate the ASP operation will have the following steps: a model objective, data collection, mathematical equations or models for each ASP as mentioned above, model calibration, and model validation [6].
Mathematical modelling has become an integral part of the design and operation of wastewater treatment processes, particularly the ASP. Simulations conducted with the models created have been a great source of value for ASP operators, designers, and even the wider scientific community. The main benefits of these models are the wide range of system functions and conditions that can be simulated and tested and solutions that can be found in a short time with low associated costs [7]. There are three main types of modelling that have been historically used for the ASP: deterministic or mechanistic modelling, stochastic modelling, and hybrid models combining the two approaches. The most efficient models use hybrid models where stochastic modelling is used for the hard-to-define parameters and variables in the treatment process. Deterministic modelling is used for the parts of the process that are both better understood and can be validated using the biological, physical, and chemical laws of the ASP [8].
Historically, deterministic models were the earliest type of work on activated sludge plants. Experimental data were taken and used to generate mathematical equations that depicted the relationship between variables in the various stages of the ASP. The most used mathematical model of the ASP was created by the International Association on Water Pollution Research and Control (IAWPRC) Task Group [9]—the Activated Sludge Model No. 1 (ASM1). Even though it was developed in 1987, researchers still widely use it for their work, albeit with modified versions.
The main processes involved in the traditional ASM1 model were the microorganisms’ growth, maintenance, and decay. Nitrification and denitrification were also included in some models along the way. It was accepted that this simplified approach has some demerits due to considering only these few processes and components [8]. Over the years, many modifications have been made to the traditional model approach. For example, Eckhoff et al. [10] used COD instead of BOD as a parameter to calculate the inert fraction of the substrate. Models based on COD are generally preferred over BOD in academic/research models because they are better at conserving the mass oxygen balance. However, BOD models are used to better characterize influent wastewater [11].
There are a few drawbacks to the ASM1 model. The International Water Association (IWA) has only given reference values for the dynamic or stoichiometric parameters of the model and its application to a real-life WWTP; the parameters will have to be corrected [12]. Different calibration data sets can produce the same results. Some variables used cannot be measured in the real-time process, making it hard to verify the model. Certain factors are not considered, such as the dependency of temperature and pH on the constants used. Calibration and model verification can be difficult and highly sensitive—sometimes, extensive lab equipment is required. Phosphorous removal was also not considered in this model, which created issues in practical application [13].
In 1995, a modified version of the ASM1 called the Activated Sludge Model No. 2 (ASM2) was developed, which included phosphorous removal in addition to carbonaceous and nitrogenous material. However, phosphorous removal is complex, thereby complicating the calibration and verification of the ASM2 model. The ASM1 and ASM2 were further improved by creating two models, Activated Sludge Model No. 2d (ASM2d) and Activated Sludge Model No. 3 (ASM3). ASM2d builds upon ASM2 by adding denitrifying activity of Polysulphate Accumulating Organisms that show better relation between phosphorous and nitrate. ASM3 was developed similar to ASM1 but considering the effect of storage polymers in heterotrophic activated sludge conversion [14].
To summarize, ASM1 can be used to simulate both carbon removal and denitrification, ASM2 simulates phosphorous removal in addition to decarbonization and denitrification, ASM2d further improved the relationship between phosphorous and nitrate in ASM2, and ASM3 improved upon ASM1 adding the effect of storage polymers. All the ASM models are mechanistic models where differential equations are used to describe and restore the dynamic changes in the wastewater treatment system. The models ASM1 and ASM2, ASM2d use the theoretical basis of death–regeneration and maintenance, whereas ASM3 utilizes the theoretical basis of endogenous microbial respiration [13].
Due to the many processes, variables, and parameters involved, activated sludge models are often validated and calibrated by trial and error with no standard procedure [8,15]. For example, Siegrist and Tschui [16] created several models with different sets of parameters for partial and sequential calibration. Calibration for COD removal was undertaken by considering the oxygen consumption rate when other parameters were held constant. The model was validated by comparing it with full-scale treatment plant data, where an example would be [17]. They created a dynamic model for carbon and nitrogen removal and validated it with data obtained from 10 days of monitoring Norwich Sewage Works in England. Côté et al. [18] used a hybrid model, which improved upon previous work by using a neural network to predict and reduce error in mechanistic model variables such as effluent suspended solids, effluent COD, and volatile solids in return sludge, etc. The mechanistic model was validated with data from Norwich Sewage Works.
2.1. Artificial Intelligence Used in Modelling of WWTP
The traditional mechanistic models, such as ASM1, have reached a limit when considering the complexity and accuracy of application to the ASP, with some of the issues mentioned in Section 2. Thus, Artificial Intelligence can be used as a modelling tool to minimize the complexities and reduce computing time [19].
There are several different types of AI modelling tools adapted for different fields and functions. Of these are feedforward Artificial Neural Networks (ANNs); radial basis functions (RBFs); recurrent neural networks (RNNs); multilayer perceptron (MLP) using backpropagation learning; hybrid models such as adaptive neuro-fuzzy inference (ANFIS). More recently, deep neural networks (DNNs) contain multiple hidden layers and require significant computational power [20,21]. The traditional ANN has a few limitations such as poor generalization due to incorrectly chosen network structure, hard-to-interpret system information stored in neuron weights, and a large amount of data required for accuracy. ANFIS tends to overcome a few of these limitations [21]. Additionally, Feedforward Artificial Neural Networks (FANNs)—MLPs and RBFs—are commonly used in wastewater treatment operations. MLPs have been found to be better than regression models for wastewater treatment [8], whilst RBFs are useful because they can easily predict system behavior from past observations [22]. DNNs vary from typical feedforward neural networks (ANNs) because DNNs contain more neurons, complexity in connecting layers, more computing power required to train the network due to having more neurons/connections, and automatic feature extraction [22]. Some of these tools, along with applications in wastewater treatment, particularly the ASP, are discussed below.
2.2. Artificial Neural Network (ANN)
ANN is designed as a simplified version of the human brain, where inputted neurons generate output signals. The general structure of a neural network is shown in Figure 2, where there are layers of interconnected neurons. There are several layers: the input layer, where inputs are given as weights to input neurons; the output layer, where output neurons do processing based on the input using an activation function and generate output; and single/multiple hidden layers, where intermediary neurons process the weighted sums of the inputs. Sometimes, output neurons can also be connected to each other and not just to the previous inputs, but this is complex and uncommon [20,23].
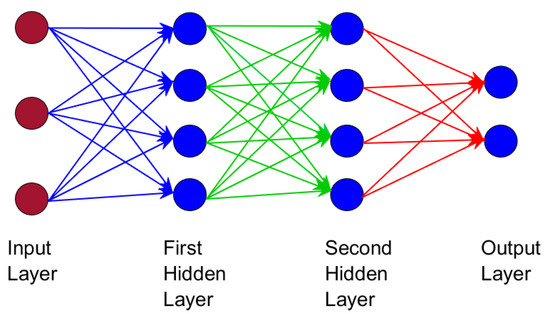
Figure 2.
A depiction of a simplified artificial neural network with input–output layer and interconnecting hidden layers shown [8] [Reproduced with permission from Rustum, R. Modelling Activated Sludge Wastewater Treatment Plants Using Artificial Intelligence Techniques (Fuzzy Logic and Neural Networks). Doctor of Philosophy. Heriot-Watt University. April 2009.].
The neuron weights are determined using multiple data sets’ training and validation processes. This is achieved by introducing various data sets of inputs and corresponding outputs (real experimental results) to the neural network. Weights will be continuously adjusted to minimize errors. These training data sets will also help identify the number of hidden neurons; more data points used means more hidden neurons are required. Validation or verification using separate datasets should be conducted at the end of the training process to ensure it was achieved correctly [23]. A few examples of ANN used in WWTP modelling are given below.
Plonka [23] used a layered ANN to create a virtual sensor that measures nitrate–nitrogen in the activated sludge reactor tank. The predicted readings from the ANN were then compared to the actual probe in the reactor. Cascade training was used to form a layered ANN wherein more neurons are added, each creating another network layer. There has not been an exact method of calculating the size of an ANN, so this type of training is beneficial. The training was conducted using ‘FannTool’ graphical interface [23]. ANNs require large samples of inputs and outputs to train the network, in this case, the measuring probes. The input needed was obtained by computer simulation via the STOAT (Sewage Treatment Operation and Analysis over Time) application with the BSM1 (Benchmark Simulation Model No. 1) mathematical model. STOAT works with both COD and BOD measurements. The ANN was run with two sets of data—one obtained from the simulation and another set of distorted data where artificial random noise of ±2% of each individual value was introduced into the simulation data. Values of average error found for both sets of data were found to be well below the sensitivity of the actual measuring probes. The distortion had a negligible effect on the accuracy of the calculations.
Messaoud et al. [24] used a standard feedforward neural network to predict the performance of the wastewater treatment process. The ANN used had one hidden layer and one output layer, with training conducted for a different number of iterations and a number of hidden layer neurons. Training and validation were conducted with different data sets taken from a WWTP in Ain Beida, Algeria, designed for 16,000 m3/day flow and 300,000 equivalent population. Sensitivity analysis was conducted to determine input parameters. Results showed the ANN model is a good tool for reliability prediction and can help plant operators predict parameters, especially BOD, which usually has a five-day determination period.
2.3. Multilayer Perceptron Neural Network (MLP)
MLPs are a class of feedforward ANNs, especially with backpropagation (MLPBPNN) which minimizes the error function of MLP by using a gradient descent method to change the value of the weights. Kusiak and Wei [25] used a multilayer perceptron (MLP) neural network to build and validate an ASP model. Data used were from an industrial Wastewater Reclamation Authority (WRA) in Des Moines, Iowa, US. Dissolved oxygen (DO) concentration was used as a control variable. The MLP neural network was used to build three prediction models for minimizing three parameters: airflow rate, effluent CBOD, and TSS concentration. Two hundred networks were trained for each model, each with one hidden layer and neurons between three and ten. All airflow rates and TSS rates were predicted accurately; however, CBOD values obviously differed. The correlation coefficient was 0.99, indicating an accurate model.
2.4. Adaptive-Network-Based Fuzzy Inference System (ANFIS)
ANFIS joins fuzzy logic and ANN to form a combined system that extracts fuzzy rules from data to a rule-base and feeds it to the ANN [21]. A few examples of ANFIS used in WWTP are summarized below.
Araromi et al. [21] used an adaptive neuro-fuzzy inference system (ANFIS) for non-linear dynamic system identification of the wastewater treatment process. The study used ANFIS and GLM (Generalized Linear Model Regression). Brute force exhaustive search was used for the ANFIS model wherein all elements of the search space are tested iteratively, and LASSO (least absolute shrinkage and selection operator) was used as penalized regression method in GLM. Outliers were removed from the data and smoothed out. For both training and validation datasets, ANFIS predicted values better than GLM regression models. It was also found that ANFIS can be used to estimate the time required to reach an adequate performance level, as the model indicated that there are time lags in the treatment process.
Rustum [8] used an improvised ANFIS using the Kohonen Self-Organizing Map (Hybrid KSOM-ANFIS) to model an ASP and predict effluent Biological Oxygen Demand (BOD5) and Suspended Solids (SS) concentration. Results showed the hybrid model outperformed the ANFIS model in predicting the necessary values [8]. KSOM was used to extract features from noisy data and fill in missing values [26,27,28,29]. Three years of data were taken from a WWTP in Edinburgh, UK, and two models were tested, one with ANFIS alone and another with the hybrid KSOM-ANFIS [27]. Du et al. also [30] used ANFIS to predict and have a heuristic understanding of sludge age in ASP. The combined fuzzy logic with the neural network was able to not only understand the complex relationships within the data, but also perform rule extraction. Additionally, Rustum and Forrest [31] developed a model for fault detection in the activated sludge process using the Kohonen self-organizing Map. Rustum and Adeloye [26] developed a model for knowledge discovery from activated sludge processes using unsupervised neural networks (Kohonen Self-Organizing Map).
2.5. Deep Learning Neural Network (DNN)
DNNs are a form of ANN where there is higher complexity in the number of layers and connections between layers. It is the latest development in the field of ANNs, and an example used in WWTP is given below.
Oulebsir [32] used a deep neural network (DNN) to optimize the energy conservation of WWTP. It is estimated that energy costs consume 28% of the total costs of wastewater treatment. This paper proposed a methodology to select the best methods of energy consumption based on Key Performance Indicators (KPI) at a conventional activated sludge WWTP located in Boumerdes, Algeria. Daily data for entry/exit pollution parameters—[BOD5, COD, SS, NH4], total flow, total energy consumed, influent temperature, and recirculated sludge flow—were collected from the treatment plant and cleaned of missing data and outliers. Two types of data selection were performed; effluent quality values that were near design values corresponding to environmental standards were selected. KPIs used here were Treatment Yield, Global Treatment Yield, and Standardized Global Treatment Yield. The second selection was made to find the best energy consumption according to certain KPIs: the Pollution Index, Abatement Degree of Pollution, Global Degree of Abatement of Pollution, and Water Quality Index. The selected data were then used to train (80% of data) and test (20% of data). DNN used for this study had four inputs, and six hidden layers, each having 200 neurons. Trial and error were used for the number of neurons/hidden layers. Results showed good performance for all models. A model trained with Global Degree of Abatement of Pollution (GPAB) selected data was best; however, Root Mean Squared Error observations standard deviation ratio (RSR) in the testing period, and Percentage Bias (PBIAS) values indicated overfitting. The model trained with Pollution Index PI (Water Quality Index, WQI) also had R2 close to the GPAB model; however, PBIAS showed underfitting. It was concluded from the values of the KPIs that pollution entering the WWTP had more effect on energy consumption than effluent parameters and removal efficiency. The study states that limited data might restrict the applicability of their model to other WWTP and that more criteria might be applied in selecting the data to train and test the DNN for better understanding.
3. Optimization of Operation and Control of Activated Sludge Process (ASP)
Wastewater requires comprehensive treatment before being disposed of safely or reused for specific applications. Therefore, many locally and globally standards are imposed on the effluent before it is approved for its end purpose. Given the strict criteria, optimizing the operational and control process is the only way to reduce costs since stinting on quality is impossible [5].
For optimal performance of ASP, there must be a balance maintained between available organic matter for bacteria to break down, the available number of bacteria (activated sludge), and dissolved oxygen necessary for effective breakdown. In terms of parameters to be controlled, these balance factors translate to aeration rate, dissolved oxygen concentration (DO), rate of recirculation of activated sludge (RAS), and amount of excess sludge disposed of from the secondary clarifier (WAS). Further secondary parameters include Mixed Liquor Suspended Solids (MLSS) concentration, Food to Microorganism Ratio (F:M), and sludge age [8]. Some common operational problems in the operation of ASP are sludge bulking and foaming caused by non-degradable surfactants or overgrowth of filamentous bacteria in the sludge. It can cause poor settling of sludge, resulting in lower effluent quality, loss of active bacteria, and increased costs. Therefore, ASP operators need to avoid this issue for a successful treatment process, usually by predicting the Sludge Volume Index (SVI) [22].
Optimization of the ASP would balance operation and energy consumption while also considering safety and other environmental factors. For example, the aeration process included in activated sludge treatment within WWTP, although very important for mixing the influent with enough oxygen for the proliferation of bacteria, and mixing sludge with wastewater influent, consumes around 60% of energy consumption [5,32]. Then, the secondary clarifier collects treated water from the activated sludge reactor and purifies it further using sedimentation [5]. Nitrification is another process where dissolved oxygen (DO) content is crucial to the effective removal of nitrogen (in the form of nitrate, ammonia, nitrite, etc.), which is difficult to remove. Generally, WWTPs are a necessary component in society, and, therefore, energy conservation is not the primary focus. However, even though WWTPs are relatively inefficient in energy consumption, there is potential for improvement. A possibility here is to utilize electricity generated from biomass for a part of the WWTP’s energy demand [20,32].
As seen above, the process of ASP optimization involves a balancing act of many factors, usually achieved by an optimization algorithm. Any such algorithm must have the following components: an objective function that should either be minimized or maximized for best performance, state variables of the process, decision variables which are the values that should be manipulated to maximize or minimize the objective function, and constraints placed on the decision variables to avoid generating unfeasible or undesirable solutions [32]. If one single objective is to be fulfilled, the algorithm is called Single Objective Optimization (SOO). However, the typical ASP will have several objectives to optimize, for example, maximizing the dissolved oxygen (DO) concentration within the aerator while minimizing energy output and costs, which may end up contradicting each other. So, a single solution cannot be found that satisfies all the objectives. The algorithms that deal with these multiple conflicting objectives and associated restraints are multiobjective optimization (MOO) algorithms. Utilizing the algorithms will provide a set of non-dominated solutions called a Pareto set rather than one single solution. These solutions can then be judged based on trade-offs, and the final solution can be selected [33]. In addition, a common issue in MOOs is that of local optima being found, which means the algorithm will often identify a solution that is the best within its neighborhood of possible solutions but not the best solution within the entire population space of possible solutions [34].
The objective function plays an essential role in any optimization algorithm. It allows the algorithm to search and find the possible solutions by evaluating its fitness against the objective function, i.e., how well each solution satisfies the objective function. A typical MOO would contain an objective function similar to the form in Equation (1):
where J is the objective function to be minimized, J1, J2,……..Jn represents the multiple objectives, t is time, tf is the time horizon, x is the set of process state variables, u is the set of decision variables, T is a transpose, and n is the number of objectives.
Minu,tf J(x, u, tf) = [J1, J2,……..Jn]T
The above equation is usually subject to certain initial conditions, for example, x(t0 = x0), equality or inequality constraints, for example, h(x,u) = 0 or g(x,u) ≤ 0, and boundaries for decision variables, for example, ulowerbound ≤ u ≤ uupperbound [35,36].
Choosing the proper objective function, decision variables, and especially the constraints to avoid local optima and achieve the global optimum solution is the challenge faced in optimizing the ASP. The history of optimization of the ASP began with SOO algorithms being conducted, especially for DO concentration. However, once MOOs were used, they were usually linearized into separate SOOs to reach feasible solutions. The following sections show how a newer branch of Artificial-Intelligence-based algorithms has helped solve optimization problems with multiple objectives within the ASP.
4. Nature-Inspired Computing (NIC)
NIC is an umbrella term for Artificial Intelligence techniques that can be used to optimize processes, including the ASP. It is based primarily on the principle of how various species evolve to survive in nature. These techniques are focused on metaheuristic algorithms. Metaheuristic comes from the Greek terms ‘meta’, meaning beyond, and ‘heuristic’, meaning to discover. These algorithms intelligently use heuristics (rules learned from evolutionary processes) to identify a set of near-optimal solutions that can be sorted based on trade-offs with desired outcomes [32]. The reason for the success of such metaheuristic techniques, as stated by Yang [37], is based on three factors—the algorithms are simplistic, easy to implement, and generate diverse solutions.
NIAs can be written in several software packages such as C/C++, FORTRAN, R, PYTHON, and MATLAB; these packages can even support multiple algorithms, if necessary, based on computational power and available time [34]. The demanding part is maintaining a balance between computational speed and diversity in solutions. The greater the number of solutions considered, the greater the time to reach a solution. This is called the balance between local exploitation and global exploration. While it is essential to attain this balance, this question is still under research, mainly because of the wide variety of algorithms that exist under the NIC approach [37].
One advantage of NIAs is that they can be classified, to a certain extent, as Artificial Intelligence (AI) since the algorithms can continually adjust themselves based on the results that it obtains from the analysis. Admittedly, it is still not possible to have a truly intelligent algorithm (the perfect balance); however, current research is moving in the right direction.
One of the critical challenges this spectrum faces is the gap between theory and practical applications [37]. Most algorithms work within a small range or on one specific application, and they would have issues if applied widely. This is typical because there is no fixed mathematical framework for these analyses. Most algorithms are created based on trial and error, operating within a set of restraints that do not imitate real life with great precision [37].
5. Classification of NIC Algorithms
It is estimated that there are more than 100 NIAs currently available and classified for use in the literature. Currently, there is not a singular accepted categorization of these algorithms; however, the generally accepted classification is that all NIAs are stochastic in nature and can be divided into heuristic techniques such as Genetic Algorithm (GA) and metaheuristic techniques, which can be further subdivided into swarm-intelligence (SI)-based algorithms and bio-inspired (non-SI-based) algorithms. In addition, there is a third subset, physics or chemistry-based, rather than bio-based, but it is not considered herein [2,32].
SI-based algorithms utilize ‘swarm behavior’, which is the phenomenon in nature wherein multiple social creatures collectively function using some rules. Hence, the system has collective intelligence due to these rules, which can be described using an algorithm to generate solutions. Common examples include Ant Colony Optimization (ACO), Artificial Bee Colony (ABC), Bat Algorithm (BA), Cuckoo Search (CS), Firefly algorithm (FA), and Particle Swarm Optimization (PSO) [38].
While bio-inspired algorithms do not use swarm behavior, they still use biological concepts such as evolution and genetics. Examples are Differential Evolution (DE), Invasive Weed Optimization (IWO), Non-Invasive Weed Optimization Algorithm (NAIWO), Shuffled Frog Leaping Algorithm (SFLA), and Flower Pollination Algorithm (FPA) [37].
6. Application of NIC to Wastewater Treatment Plants
6.1. Genetic Algorithm (GA)
Genetic Algorithms are based on the principle of natural selection in nature—the base of evolution in organisms depends on a ‘survival of the fittest’ policy. GAs use pseudo-organisms in a constant-size population; they represent possible solutions and imitate the natural processes of chromosome transfer, reproduction, and mutation principles. Each pseudo-organism comprises a series of chromosome bits (0 s and 1 s) collectively representing a gene. For the algorithm to check which pseudo-organisms to ‘let live’ and which to ‘kill off’, there should be an objective function defined, which will give a measure of fitness for the pseudo-organisms. This function will differ from algorithm to algorithm and depends on the problem to be solved. A common fitness function used in several algorithms is the Mean Square Error (MSE) between the solutions generated by the algorithm and the actual or laboratory values of the process [32,39].
Once the initial population has been checked for fitness, evolutionary operators are used to moving to the next generations. Selection of where the best solution in the considered population will always move to the next generation, Crossover, where genetic information of two organisms in a population will be transferred and combined to make up the next generation, and Mutation, where random modifications are made to the genetic information of some organisms in the population to generate diversity and ensure that the algorithm does not converge to local optima [39]. A flowchart of a basic steady-state GA is shown in Figure 3.
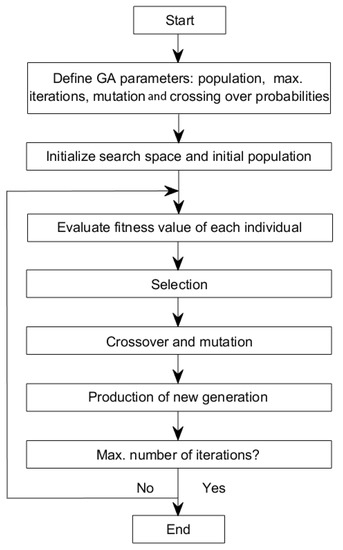
Figure 3.
A flowchart depicting the steps involved in a typical Genetic Algorithm.
GA benefits are that it can handle discontinuous data and has a good chance of reaching global optimum because the whole population of solutions is being considered simultaneously. However, this increases the time required for the analysis and takes up a lot of computing power. Therefore, calibrating the model should ensure that the minimum number of iterations is used to obtain the solution from the GA. This would also mean there will be a limit to the number of parameters that can be chosen [34]. Genetic Algorithms (GAs) are also used extensively in wastewater treatment, as they have less potential to become trapped in local minima [33]. Some applications of GA in wastewater treatment are summarized in Table 1.

Table 1.
Research in ASP optimization using Genetic Algorithm (GA).
6.2. Particle Swarm Optimization (PSO)
Particle Swarm Optimization (PSO) is an evolutionary algorithm that emulates social behavior within a swarm. The algorithm uses a random set of data with a certain population size, including the candidate solutions or particles. The particles move or fly with a certain assigned velocity through the search space to locate the best solution based on a mathematical fitness function. The particles communicate with each other; thereby, each particle will contain the memory of its best solution so far (local optimum) and the best solution of the entire population so far (global optimum). Depending on the information sharing between particles, the particles will ultimately move from their local optima and converge at a single global optimum (problem-solution). The movement of a particle from one point to the next depends on three components. An inertial component means they tend to go in the current direction of movement, a memory component means they will revisit their best solutions, and a social component means they will visit the best solutions achieved by their neighboring particles. The algorithm applies certain mathematical equations until a pre-specified rule is achieved, usually the maximum number of iterations [40,42].
PSO is known for quickly converging to an optimum solution because of not having any evolutional operators and utilizing simple mathematical operations for updating each iteration [43]. Some applications in ASP are given in Table 2.
Table 2.
Research in ASP optimization using Particle Swarm Optimization (PSO).
6.3. Differential Evolution (DE)
DE is a population-based algorithm proposed by Storn and Price [43]. The algorithm begins with a uniformly random set of possible solutions from the search space and then uses the same principles as any evolutionary algorithm (EAs). The difference from other EA is that DE uses self-referential Mutation wherein Mutation of the second generation is performed using a scaled difference of each member of the population. This helps the searching of the algorithm be easier across iterations as the scaled differences adapt to the natural scaling of the population in each iteration. Basic DEs only require four basic steps—initialization of decision variables, Mutation with difference vectors, Crossover, and selection [48]. Some applications in ASP are given in Table 3.
Table 3.
Research in ASP optimization using Differential Evolution (DE).
6.4. Ant Colony Optimization (ACO)
The ACO algorithm aims to imitate the foraging behavior of ants, where virtual ants move through the solution space, tending towards the areas where more ‘pheromones’ are deposited. All repetitions have the same amount of pheromone at the beginning with some maximum and minimum limits. The pheromones are usually updated according to the MAX-MIN Ant system, wherein at the end of each iteration, a new amount of pheromone is added along the edges of the path, followed by the ant achieving the best solution [52]. There is a tendency for multiple ants to produce similar solutions in one iteration, this can be overcome by using a local pheromone update in addition to the usual pheromone update in the MAX-MIN system. The local pheromone update reduces the pheromones along paths that have already been covered so remaining ants will choose different paths. This will diversify the solution space, thereby increasing the chance of finding the necessary solution. This system is referred to as Ant Colony System (ACS) [53]. ACO is useful in problems containing discrete-continuous optimization which is the case in the ASP [20]. Some applications of ACO in the ASP are given in Table 4.
Table 4.
Research in ASP optimization using Ant Colony Optimization (ACO).
6.5. Cuckoo Search Algorithm (CSA)
The CSA is based on breeding patterns of cuckoo birds and the Lévy flights of some fruit flies and birds. It is commonly observed that the female cuckoo bird lays her eggs in other birds’ nests and ensures the survival of her spawn by consuming some of the host bird’s eggs that were already present in those nests. Some host birds may abandon the nest if they discover foreign eggs, and to prevent this, some cuckoo birds have learnt to imitate the shape and size of the host bird eggs. In nature, they use an almost random method to search for the nests; however, the Lévy flight mechanism is used, which is like the way many birds fly [57,58]. Lévy flights are mathematical models for random walks characterized by step lengths that follow the power law [58]. The conventional CSA uses a step size that is small enough that it will readily converge to the local optimum. If the size is larger, it will move out of the local optimum, but search precision and speed will be affected [57]. The success of the cuckoo’s nest search depends on finding a suitable host nest. Generally, it is seen that flight behavior and search of many birds and insects are like the characteristics of Lévy flights wherein they take small random steps followed by large jumps. This flight behavior, combined with the cuckoo breeding patterns, forms the basis of the CSA. There are certain rules enforced in a typical CSA, such as that each cuckoo bird lays one egg at a time in a randomly chosen nest, the best nest with the highest egg qualities passes onto the next generation, the number of host nests is fixed, and hosts can discover the cuckoo eggs based on randomized probability. If the cuckoo egg is discovered, then the host can either destroy the nest or abandon them, in which case, a new nest will be created [58] when the estimated parameters in the model are encoded as the location of the bird’s nest, with an objective function for the nest. To obtain a minimum/maximum value for the function, the CSA is used to adjust each nest position, effectively determining the value of the parameters [57]. Most important in CSA is the switching parameter probability, which controls the randomization, elitism, and local search. This gives CSA the ability to efficiently search the space. Additionally, the long jumps of the Lévy flights allow the CSA to avoid local optima [59]. Some research on applying CSA in ASP is given in Table 5.
Table 5.
Research in ASP optimization using Cuckoo Search Algorithm (CSA).
6.6. Firefly Algorithm (FA)
The Firefly Algorithm (FA) is based on the flashing patterns of fireflies. These patterns are produced by bioluminescence and form a sort of signal system by which the fireflies can attract mates or prey and even act as a warning system. The flashing pattern has a rhythm that can be formulated into an objective function to be optimized. A few rules for the basic FA can be as follows: fireflies are attracted to each other regardless of sex, the landscape of objective function determines the brightness of the firefly, and the brightness determines the attractiveness of a firefly. Each firefly in an FA can work almost independently, so it can be used for parallel implementation and can even outperform the PSO in this situation. The fireflies also tend to aggregate around each optimum instead of jumping from one to the other, so FA can be more accurate in finding the global optimum as well as local optima [61]. FA has been used in the field of ASP optimization, as discussed in Table 6.
Table 6.
Research in ASP optimization using Firefly Algorithm (FA).
6.7. Whale Optimization Algorithm (WOA)
This algorithm is based on the bubble-net feeding behavior of the whale. When they hunt for nutrients close to the water surface, whales exhibit a spiral movement around their prey characterized by distinctive bubbles along an Archimedean path. The algorithm consists of two phases—prey and encircling. The whales will update their position based on the best location with respect to the prey, which is called encircling behavior. There is a 50% probability of whether the whale will continue moving around prey in shrinking circles or if they will update their position randomly [5]. The advantage of WOA is the exploration where search space is randomly explored and intensive exploitation wherein current top solutions are searched intensively until the best solution is found. The main issues with WOA are the tendency to end in local optima and slow convergence speed compared to other algorithms [65]. Some applications of WOA in ASP are given in Table 7.
Table 7.
Research in ASP optimization using Whale Optimization Algorithm (WOA).
6.8. Bat Algorithm (BA)
Bat Algorithm (BA) is based on the echolocation behavior of bats for their foraging needs. Bats use echolocation for multiple purposes—to estimate distances and to differentiate between food, prey, and obstacles. They do this by the varying wavelength of their sound emissions and by adjusting the emissions rate as they come into proximity to their target. The BA imitates this behavior by the following: create an initial bat population from the search space, and set the initial parameters—sound pulse frequency, rate, and loudness. The algorithm will then generate the position and velocity for each bat. Now each bat is ranked for pulse rate, loudness, and minimum frequency depending on the random number generated (rand > pulse, rand > loudness), and the best solutions are selected [68]. The loudness and pulse rate provides a mechanism for automatic control, allowing the algorithm to balance between exploration and exploitation [69]. The process continues until the stopping criteria are met [68]. BA has been used in the field of ASP optimization, as summarized in Table 8.
Table 8.
Research in ASP optimization using Bat Algorithm (BA).
6.9. Invasive Weed Optimization Algorithm (IWO)
The Invasive Weed Optimization (IWO) algorithm imitates field weeds’ growth, reproduction, diffusion, and competition. Weeds generally show a strong pattern of dominance in their behavior. With successive iterations, the IWO algorithm depicts a narrowing spatial distribution of the next generation of seeds, which gives the algorithm better global searchability at the beginning and better localized searchability in the later iterations. However, this may end up hindering the results, so the IWO must be improved [12]. Possible solutions (weeds) are generated randomly in the D-dimension solution space, and the seeds grow and bloom. The new generation of seeds in the next iteration is based on parent fitness. Spatial diffusion is represented by the standard deviation of the normal distribution of seeds in the search space. The maximum population is pre-set, and when it is reached, the parents will reproduce and then the adaptive value is used to eliminate unfit parents/children [12]. The advantage of IWO is that it allows all possible candidates to participate in the reproduction process to form the next generation. This contrasts with GA, where less-fitted individuals would not be allowed to reproduce. Additionally, compared to PSO, which has a heavy computational burden due to multiple updates (position, velocity, etc.) in every iteration, IWO is straightforward and, therefore, less computationally heavy [72]. IWO has been used in the field of ASP optimization, as discussed in Table 9.
Table 9.
Research in ASP optimization using Invasive Weed Optimization Algorithm (IWO).
7. Conclusions
Optimization of wastewater treatment remains a widely researched topic, and nature-inspired techniques are some of the quicker and more efficient ways to go about it. This paper analyzed the latest algorithms developed and applied in wastewater treatment research and discussed the advantages and limitations of each technique that can be applied to the ASP. Most applications dealt with the NIAs being used to improve and optimize the models—such as finding the number of neurons needed for an ANN-based model. NIAs can have their own possible issues, as mentioned in the sections above. A short comparison of the methods reviewed here are shown below in Table 10.
Table 10.
List of some benefits and advantages of reviewed nature inspired algorithms.
These NIA improved models can be of great significance in the field of wastewater treatment going into the future. Currently, lot of research has been conducted in this field; however, successful implementation in the industry remains to be achieved. This is mainly because most models are not reproducible—standardization is yet to be achieved in this aspect [81]. While there are numerous algorithms being created, there is no single framework model on which to compare efficiency of using any algorithm. Limited academic transparency is also another issue wherein code used for building a model is not available in research papers, making it harder for other researchers to improve upon it or even for treatment plant operators to utilize it [81].
Hybridization of the models, wherein multiple algorithms can be utilized within one model, might help to balance out some of the drawbacks of each algorithm while making use of individual advantages [82]. For example, ref. [83] utilized both PSO and GA within a back propagation neural network creating a hybrid model. The combination was able to use the global optimization ability of the PSO as well as the parallel computing ability of the GA to improve the model. More research conducted on hybrid models might also lead to an eventual framework model. Most research models also utilize small size data with a narrow range limiting the applicability of the models to real-life WWTP [82]. An additional step to increase the accuracy of these algorithms can be to utilize large and varied data sets, as limited data can affect model applicability across WWTPs. Further work would be to develop a descriptive model for ASP with data taken from a real-life treatment plant using an AI modelling tool such as DNN and then optimize the models using some NIAs as appropriate. Such a model could then be used to research the future applications mentioned above and ultimately lead to widespread application in treatment plants.
Author Contributions
Conceptualization, M.D. and R.R.; methodology, M.D. and R.R.; writing—original draft preparation, M.D.; writing—review and editing, R.R.; supervision, R.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank their institutions for giving them the time to work on this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Legras, S. Correlated environmental impacts of wastewater management in a spatial context. Reg. Sci. Urban Econ. 2015, 52, 83–92. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Y.; Fu, Z.; Li, W.; Zheng, L.; Li, M. Assessment of energy use and environmental impacts of wastewater treatment plants in the entire life cycle: A system meta-analysis. Environ. Res. 2021, 198, 110458. [Google Scholar] [CrossRef] [PubMed]
- Paulu, A.; Bartáček, J.; Šerešová, M.; Kočí, V. Combining process modelling and lca to assess the environmental impacts of wastewater treatment innovations. Water 2021, 13, 1246. [Google Scholar] [CrossRef]
- Vijayaraghavan, G.; Jayalakshmi, M. A Quick Review on Applications of Fuzzy Logic in Waste Water Treatment. Int. J. Res. Appl. Sci. Eng. Technol. 2015, 3, 421–425. Available online: https://www.academia.edu/12742926/A_Quick_Review_on_Applications_of_Fuzzy_Logic_in_Waste_Water_Treatment (accessed on 26 October 2020).
- Arda Kuş, B.; Kara, T. Modeling and simulation of an optimal unified tank model for aeration-sedimentation processes in wastewater treatment plants. J. Water Process Eng. 2020, 37, 101487. [Google Scholar] [CrossRef]
- Dai, H.; Chen, W.; Dai, Z.; Li, X.; Lu, X. Efficient model calibration method based on phase experiments for anaerobic–anoxic/nitrifying (A2N) two-sludge process. Environ. Sci. Pollut. Res. 2017, 24, 19211–19222. [Google Scholar] [CrossRef]
- Fracz, P. Non-linear modeling of activated sludge process using the Hammerstein-Wiener structure. E3S Web Conf. 2016, 10, 00119. [Google Scholar] [CrossRef]
- Rustum, R. Modelling Activated Sludge Wastewater Treatment Plants Using Artificial Intelligence Techniques (Fuzzy Logic and Neural Networks). Ph.D. Thesis, Heriot-Watt University, Edinburgh, UK, 2009. [Google Scholar]
- Henze, M.; Grady, C.L., Jr.; Gujer, W.; Marais, G.v.R.; Matsuo, T. Activated Sludge Model No. 1. Int. Assoc. Water Pollut. Res. Control 1987, 18, 115–122. [Google Scholar]
- Eckhoff, D.W. Activated Sludge Systems: Kinetics of the Steady and Transient States. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1969. [Google Scholar]
- Cadet, C.; Guillet, A.; Aurousseau, M. Dynamic Modeling of an Activated Sludge Process: Case Study on Paper Mill Effluents. J. Environ. Eng. 2016, 142, 04016040. [Google Scholar] [CrossRef]
- Du, X.; Ma, Y.; Wei, X.; Jegatheesan, V. Optimal parameter estimation in activated sludge process based wastewater treatment practice. Water 2020, 12, 2604. [Google Scholar] [CrossRef]
- Li, M.; Cui, S.; Li, P.; Li, C.; Song, J. Research Progress on Modelling of Activated Sludge Process in China. IOP Conf. Ser. Earth Environ. Sci. 2018, 186, 012083. [Google Scholar] [CrossRef]
- Mulas, M. Modelling and Control of the Activated Sludge Process. Ph.D. Thesis, Università degli Studi di Cagliari, Caglari, Italy, 2006. [Google Scholar] [CrossRef]
- Sin, G.; De Pauw, D.J.W.; Weijers, S.; Vanrolleghem, A. An efficient approach to automate the manual trial and error calibration of activated sludge models. Biotechnol. Bioeng. 2008, 100, 516–528. [Google Scholar] [CrossRef] [PubMed]
- Siegrist, H.; Tschui, M. Interpretation of Experimental Data with regard to the Activated Sludge Model No. 1 and calibration of the Model for Municipal Wastewater Treatment Plants. Water Sci. Technol. 1992, 25, 167–183. [Google Scholar] [CrossRef]
- Lessard, P.; Beck, M.B. Dynamic Modelling of The Activated Sludge Process: A Case Study. Water Res. 1993, 27, 963–978. [Google Scholar] [CrossRef]
- Côté, M.; Grandjean, B.A.; Lessard, P.; Thibault, J. Dynamic Modelling of the Activated Sludge Process: Improving Prediction Using Neural Networks. Water Res. 1995, 29, 995–1004. [Google Scholar] [CrossRef]
- Malviya, A.; Jaspal, D. Artificial Intelligence as an upcoming technology in wastewater treatment: A comprehensive review. Environ. Technol. Rev. 2021, 10, 177–187. [Google Scholar] [CrossRef]
- Ramachandran, A.; Rustum, R.; Adeloye, A.J. Review of Anaerobic Digestion Modeling and Optimization Using Nature-Inspired Techniques. Processes 2019, 7, 953. [Google Scholar] [CrossRef]
- Araromi, D.O.; Majekodunmi, O.T.; Adeniran, J.A.; Salawudeen, T.O. Modeling of an activated sludge process for effluent prediction—A comparative study using ANFIS and GLM regression. Environ. Monit. Assess. 2018, 190, 495. [Google Scholar] [CrossRef]
- Bagheri, M.; Mirbagheri, S.A.; Bagheri, Z.; Kamarkhani, A.M. Modeling and optimization of activated sludge bulking for a real wastewater treatment plant using hybrid artificial neural networks-genetic algorithm approach. Process Saf. Environ. Prot. 2015, 95, 12–25. [Google Scholar] [CrossRef]
- Plonka, L. Artificial Neural Network as a Virtual Sensor of Nitrate Nitrogen (V) Concentration in an Activated Sludge Reactor. Civ. Environ. Eng. Rep. 2020, 30, 188–200. [Google Scholar] [CrossRef]
- Messaoud, D.; Hellal, A.; Imed, L. Wastewater Treatment Plant Performances Modelling Using Artificial Neural Networks. Eco Technol. Wastewater Treat. 2018, 11, 1–10. [Google Scholar]
- Kusiak, A.; Wei, X. Optimization of the Activated Sludge Process. J. Energy Eng. 2013, 139, 12–17. [Google Scholar] [CrossRef]
- Rustum, R.; Adeloye, A.J. Features Extraction from Primary Clarifier Data Using Unsupervised Neural Networks (Kohonen Self Organising Map). In Proceedings of the 7th International Conference on Hydroinformatics, Nice, France, 4–8 September 2006. [Google Scholar]
- Rustum, R.; Adeloye, A.J. Replacing Outliers and Missing Values from Activated Sludge Data Using Kohonen Self-Organizing Map. J. Environ. Eng. 2007, 133, 909–916. [Google Scholar] [CrossRef]
- Rustum, R.; Adeloye, A.; Simala, A. Kohonen self-organizing map (KSOM) extracted features for enhancing MLP-ANN prediction models of BOD5. In Proceedings of the International Symposium: Quantification and Reduction of Predictive Uncertainty for Sustainable Water Resources Management-24th General Assembly of the International Union of Geodesy and Geophysics (IUGG), Perugia, Italy, 2–13 July 2007; pp. 181–187. [Google Scholar]
- Rustum, R.; Adeloye, A. Improved Modelling of Wastewater Treatment Primary Clarifier Using Hybrid Anns. Int. J. Comput. Sci. Artif. Intell. 2012, 2, 14–22. [Google Scholar] [CrossRef]
- Du, Y.G.; Tyagi, R.D.; Bhamidimarri, R. Use of fuzzy neural-net model for rule generation of activated sludge process. Process Biochem. 1999, 35, 77–83. [Google Scholar] [CrossRef]
- Rustum, R.; Forrest, S. Fault Detection in the Activated Sludge Process using the Kohonen Self-Organising Map. In Proceedings of the 8th International Conference on Urban Planning, Architecture, Civil and Environment Engineering, Dubai, United Arab Emirates, 21–22 December 2017. [Google Scholar]
- Oulebsir, R.; Lefkir, A.; Safri, A.; Bermad, A. Optimization of the energy consumption in activated sludge process using deep learning selective modelling. Biomass Bioenergy 2020, 132, 105420. [Google Scholar] [CrossRef]
- Iqbal, J.; Guria, C. Optimization of an operating domestic wastewater treatment plant using elitist non-dominated sorting genetic algorithm. Chem. Eng. Res. Des. 2009, 87, 1481–1496. [Google Scholar] [CrossRef]
- Maier, H.R.; Razavi, S.; Kapelan, Z.; Matott, L.S.; Kasprzyk, J.; Tolson, B.A. Introductory overview: Optimization using evolutionary algorithms and other metaheuristics. Environ. Model. Softw. 2018, 114, 195–213. [Google Scholar] [CrossRef]
- Hreiz, R.; Latifi, M.A.; Roche, N. Optimal design and operation of activated sludge processes: State-of-the-art. Chem. Eng. J. 2015, 281, 900–920. [Google Scholar] [CrossRef]
- Balku, S.; Buaisha, M.; Ozalp-Yaman, S. An Optimum Design for Activated Sludge Systems. Athens J. Technol. Eng. 2016, 3, 299–314. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Mateheuristic Algorithms: Success and New Challenges. J. Comput. Eng. Inf. Technol. 2012, 1, 1–3. [Google Scholar] [CrossRef]
- Fister, I., Jr.; Yang, X.; Fister, I.; Brest, J.; Fister, D. A brief review of nature-inspired algorithms for optimization. Electrotech. Rev. 2013, 80, 1–7. [Google Scholar]
- Khoja, I.; Ladhari, T.; Sakly, A.; Msahli, F. Activated sludge process identification based on genetic algorithm. In Proceedings of the 2017 International Conference on Engineering and MIS, ICEMIS, Monastir, Tunisia, 8–10 May 2017. [Google Scholar] [CrossRef]
- Fang, F.; Ni, B.J.; Yu, H.Q. Estimating the kinetic parameters of activated sludge storage using weighted non-linear least-squares and accelerating genetic algorithm. Water Res. 2009, 43, 2595–2604. [Google Scholar] [CrossRef] [PubMed]
- Revollar, S.; Francisco, M.; Vega, P.; Lamanna, R. Stochastic Optimization for The Simultaneous Synthesis and Control System Design of an Activated Sludge Process. Lat. Am. Appl. Res. 2010, 40, 137–146. [Google Scholar]
- Keskitalo, J.; Leiviskä, K. Application of evolutionary optimizers in data-based calibration of Activated Sludge Models. Expert Syst. Appl. 2012, 39, 6609–6617. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Wang, R.R.; Cao, L.L.; Liu, M.D. Activated sludge model parameters calibration based on multiobjective PSO. In Proceedings of the Environmental Engineering and Computer Application: Proceedings of the 2014 International Conference on Environmental Engineering and Computer Application (ICEECA 2014), Hong Kong, China, 25–26 December 2014; pp. 133–138. [Google Scholar]
- Rafati, M.; Pazouki, M.; Ghadamian, H.; Hosseinnia, A.; Jalilzadeh, A. Determine the most effective process control parameters on activated sludge based on particle swarm optimization algorithm (Case Study: South wastewater treatment plant of Tehran). Int. J. Environ. Anal. Chem. 2021, 1–22. [Google Scholar] [CrossRef]
- Selamat, N.A.; Wahab, N.A.; Sahlan, N. Particle Swarm Optimization for Multivariable PID Controller Tuning. In Proceedings of the IEEE 9th International Colloquium on Signal Processing and Its Applications, Kuala Lumpur, Malaysia, 8–10 March 2013; pp. 170–175. [Google Scholar]
- Choo, H.P.; Sahlan, S.; Eek, R.T.P.; Wahab, N.A. Self-tuning PID Controller for Activated Sludge System. In Proceedings of the 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, VIC, Australia, 19–21 June 2013; pp. 16–21. [Google Scholar]
- Das, S.; Subhra, S.; Suganthan, N. Recent advances in differential evolution—An updated survey. Swarm Evol. Comput. 2016, 27, 1–30. [Google Scholar] [CrossRef]
- Qiao, J.; Hou, Y.; Zhang, L.; Han, H. Adaptive fuzzy neural network control of wastewater treatment process with multiobjective operation. Neurocomputing 2018, 275, 383–393. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, J. Improved NSGA-II algorithm based on differential evolution mechanism. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017. [Google Scholar]
- Zhou, H.; Qiao, J. Multiobjective optimal control for wastewater treatment process using adaptive MOEA/D. Appl. Intell. 2019, 49, 1098–1126. [Google Scholar] [CrossRef]
- Verdaguer, M.; Clara, N.; Gutiérrez, O.; Poch, M. Application of Ant-Colony-Optimization algorithm for improved management of first flush effects in urban wastewater systems. Sci. Total Environ. 2014, 485–486, 143–152. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Stützle, T.; Birattari, M. Ant Colony Optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Schlüter, M.; Egea, J.A.; Antelo, L.T.; Alonso, A.A.; Banga, J.R. An extended ant colony optimization algorithm for integrated process and control system design. Ind. Eng. Chem. Res. 2009, 48, 6723–6738. [Google Scholar] [CrossRef]
- Verdaguer, M.; Clara, N.; Poch, M. Ant Colony Optimization-based Method for Managing Industrial Influents in Wastewater Systems. Am. Inst. Chem. Eng. J. 2012, 58, 3070–3079. [Google Scholar] [CrossRef]
- Chao, X.; Zhongqing, Y.; Jinhua, L.; Xixin, Y. Application of Data Driven Technology in Wastewater Treatment Process. In Proceedings of the 5th International Conference on Information Science, Computer Technology and Transportation (ISCTT), Shenyang, China, 13–15 November 2020; pp. 48–55. [Google Scholar] [CrossRef]
- Du, X.; Wang, J.; Jegatheesan, V.; Shi, G. Parameter estimation of activated sludge process based on an improved cuckoo search algorithm. Bioresour. Technol. 2018, 249, 447–456. [Google Scholar] [CrossRef]
- Khoja, I.; Ladhari, T.; M’sahli, F.; Sakly, A. Cuckoo Search Approach for Parameter Identification of an Activated Sludge Process. Comput. Intell. Neurosci. 2018, 2018, 3476851. [Google Scholar] [CrossRef] [PubMed]
- Ladhari, T.; Khoja, I.; Msalhi, F.; Sakly, A. Parameter identification of a reduced non-linear model for an activated sludge process based on cuckoo search algorithm. Trans. Inst. Meas. Control. 2019, 41, 3352–3363. [Google Scholar] [CrossRef]
- Yu, P.; Cao, J.; Jegatheesan, V.; Du, X. A Real-Time BOD Estimation Method in Wastewater Treatment Process Based on An Optimized Extreme Learning Machine. Appl. Sci. 2019, 9, 523. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly algorithms for multimodal optimization. Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics). In Proceedings of the International Symposium on Stochastic Algorithms, Sapporo, Japan, 26–28 October 2009; 5792 LNCS. pp. 169–178. [Google Scholar] [CrossRef]
- Kumar, S.S.; Latha, K.; Rajinikanth, V. Intelligent Tuning of PI Controller in An Aerobic Bioreactor. ARPN J. Eng. Appl. Sci. 2015, 10, 1846–1851. [Google Scholar]
- Norzain, N.A.; Sahlan, S. An optimized reduction technique via firefly algorithm and gravitational search algorithm. Commun. Comput. Inf. Sci. 2017, 752, 746–759. [Google Scholar] [CrossRef]
- Alavi, J.; Ewees, A.A.; Ansari, S.; Shahid, S.; Yaseen, Z.M. A new insight for real-time wastewater quality prediction using hybridized kernel-based extreme learning machines with advanced optimization algorithms. Environ. Sci. Pollut. Res. 2022, 29, 20496–20516. [Google Scholar] [CrossRef] [PubMed]
- Sungheetha, A.; Sharma, R.R. Fuzzy Chaos Whale Optimization and BAT Integrated Algorithm for Parameter Estimation in Sewage Treatment. J. Soft Comput. Paradig. 2021, 3, 10–18. [Google Scholar] [CrossRef]
- Anter, A.M.; Gupta, D.; Castillo, O. A novel parameter estimation in dynamic model via fuzzy swarm intelligence and chaos theory for faults in wastewater treatment plant. Soft Comput. 2020, 24, 111–129. [Google Scholar] [CrossRef]
- Recio-Colmenares, R.; Gurubel-tun, K.J.; Zúñiga-Grajeda, V. Optimal Neural Tracking Control with Metaheuristic Parameter Identification for Uncertain Nonlinear Systems with Disturbances. Appl. Sci. 2020, 10, 7073. [Google Scholar] [CrossRef]
- Nor’Azlan, N.A.; Selamat, N.A.; Yahya, N.M. Multivariable PID controller design tuning using bat algorithm for activated sludge process. IOP Conf. Ser. Mater. Sci. Eng. 2018, 342, 012030. [Google Scholar] [CrossRef]
- Yang, X. Bat algorithm: Literature review and applications. Int. J. Bio-Inspired Comput. 2013, 5, 141–149. [Google Scholar] [CrossRef]
- Julianto, V. Multiobjective Optimization Bat Algorithm Applied to Operating Domestic Wastewater Treatment Plant. In Proceedings of the International Seminar on Scientific Issues and Trends (ISSIT), Jakarta, Indonesia, 18 October 2014. BSI of Kalimalang. [Google Scholar]
- Zhao, B.; Chen, H.; Gao, D.; Xu, L.; Zhang, Y. Cleaning decision model of MBR membrane based on Bandelet neural network optimized by improved Bat algorithm. Appl. Soft Comput. J. 2020, 91, 106211. [Google Scholar] [CrossRef]
- Ahmadi, M.; Mojallali, H.; Izadi-Zamanabadi, R. State estimation of non-linear stochastic systems using a novel meta-heuristic particle filter. Swarm Evol. Comput. 2012, 4, 44–53. [Google Scholar] [CrossRef]
- Abunama, T.; Ansari, M.; Awolusi, O.O.; Gani, K.M.; Kumari, S.; Bux, F. Fuzzy inference optimization algorithms for enhancing the modelling accuracy of wastewater quality parameters. J. Environ. Manag. 2021, 293, 112862. [Google Scholar] [CrossRef]
- Céspedes, M.; Contreras, M.; Cordero, J.; Montoya, G.; Valverde, K.; Rojas, J.D. A comparison of bio-inspired optimization methodologies applied to the tuning of industrial controllers. In Proceedings of the 36th Central American and Panama Convention, San Jose, Costa Rica, 9–11 November 2016. [Google Scholar] [CrossRef]
- Rahman, I.; Vasant, M.; Singh, B.S.M.; Abdullah-Al-Wadud, M. On the performance of accelerated particle swarm optimization for charging plug-in hybrid electric vehicles. Alex. Eng. J. 2016, 55, 419–426. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, S. Differential Evolution Algorithm with Self-Adaptive Population Resizing Mechanism. Math. Probl. Eng. 2013, 2013, 419372. [Google Scholar] [CrossRef]
- Samsuddin, S.; Othman, M.S.; Yusuf, L.M. A Review of Single and Population-Based Metaheuristic Algorithms Solving Multi Depot Vehicle Routing Problem. Int. J. Softw. Eng. Comput. Syst. 2018, 4, 80–93. [Google Scholar] [CrossRef]
- Wang, G. A Comparative Study of Cuckoo Algorithm and Ant Colony Algorithm in Optimal Path Problems. MATEC Web Conf. 2018, 232, 03003. [Google Scholar] [CrossRef]
- Mostafaie, T.; Khiyabani, F.M.; Navimipour, N.J. A systematic study on meta-heuristic approaches for solving the graph coloring problem. Comput. Oper. Res. 2020, 120, 104850. [Google Scholar] [CrossRef]
- Ahmed, A.; Amin, B.M.R. Performance Comparison of Invasive Weed Optimization and Particle Swarm Optimization Algorithm for the tuning of Power System Stabilizer in Multi-machine Power System. Int. J. Comput. Appl. 2012, 41, 29–36. [Google Scholar] [CrossRef]
- Lowe, M.; Qin, R.; Mao, X. A Review on Machine Learning, Artificial Intelligence, and Smart Technology in Water Treatment and Monitoring. Water 2022, 14, 1384. [Google Scholar] [CrossRef]
- Zhao, L.; Dai, T.; Qiao, Z.; Sun, P.; Hao, J.; Yang, Y. Application of artificial intelligence to wastewater treatment: A bibliometric analysis and systematic review of technology, economy, management, and wastewater reuse. Process Saf. Environ. Prot. 2019, 133, 169–182. [Google Scholar] [CrossRef]
- Liu, Z.; Li, C.; Feng, K. Application Research of BP Neural Network Optimized by Genetic Algorithm and Particle Swarm Optimization Algorithm in MBR Simulation. In Proceedings of the 2nd International Conference on Artificial Intelligence and Big Data, Chengdu, China, 26–29 May 2019. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).